第五章_3线性定常系统的综合1201资料
合集下载
现控第五章
几点结论 1)状态反馈不增加新的状态变量 2)状态反馈对输入矩阵和直接传输矩阵无影响 3)系统的系数矩阵 A 变成 ( A BK ) 4)输出矩阵由 C 变成 (C DK )
通过适当的方法选择反馈矩阵 K ,就可以使系 统达到希望的控制目的。
2. 输出反馈 输出反馈控制律
u V Hy
I 0 [ I ( A BK ) B] [ I A B] K I
由PBH判据可得 状态反馈不能改变原系统中的不能控状态! 状态反馈可能改变系统的能观性! 例5-1
第四节 极点配置
任意配置极点的条件是原系统能控!考虑siso系统
x Ax bu y Cx u V Kx
(4)计算 K
K 0 1 1 0 n 1 n 1
(5)确定变换矩阵 P
1 2 2 3 An 1b n 1 1
n 1 1
P 1 b
Ab
2)构造状态观测器
ˆ ( A GC ) x ˆ bu Gy x 令G g 0
T
g1
g n 1 ( 0 g 0 ) (1 g1 ) 0 1 ( n 1 g n 1 )
(5-44)
0 1 A GC 0
几点结论 1)输出反馈不增加新的状态变量 2)输出反馈使 B 矩阵变成 [B BH (I DH )1 D] 当 D 0 时,对 B 矩阵无影响 3)系统矩阵由 A 变成 [ A BH (I DH )1C] 当 D 0 时,就变成 [ A BHC ] 4)输出矩阵 C 变成 (I DH )1C 当 D 0 时, C 矩阵不变 5)直接传输矩阵 D 变成 (I DH )1 D
线性定常系统
解:选取状态变量为
x y
1
x y x
2
1
x y x
3
2
由微分方程得
x x
1 2
2
x x
3
3
x 6 x 11x 6 x u
1 2 3
yx
1
或
x x x
1 0 x 0 0 0 1 x 6 11 6 x x y 1 0 0 x x
系统的状态变量选择不是唯一的,
还可以选择
令x 1 q c , x 2 i 得 1 x2 x 1 R 1 x 2 x x u 1 2 LC L L 1 1 y u c q c x1 C C 1 x 0 1 0 x 1 1 R 1 u x x 2 L L LC 2 1 x1 y 0 输出方程 C x 2
n 1 n 1 2 2 n 1 1 n
写成向量矩阵形式
(t ) Ax (t ) Bu(t ) x y (t ) Cx(t ) Du(t )
x (t ) x (t ) x(t ) x (t )
1 2 n
0 0 A a n
线性定常系统
对于线性定常系统,状态空间表达式中各元素均为 常数,即 x (t ) Ax (t ) Bu(t )
y (t ) Cx(t ) Du(t )
a a a
1n 2n nn
a a A a
11
21
a a a
12
22
a11
u1
x y
1
x y x
2
1
x y x
3
2
由微分方程得
x x
1 2
2
x x
3
3
x 6 x 11x 6 x u
1 2 3
yx
1
或
x x x
1 0 x 0 0 0 1 x 6 11 6 x x y 1 0 0 x x
系统的状态变量选择不是唯一的,
还可以选择
令x 1 q c , x 2 i 得 1 x2 x 1 R 1 x 2 x x u 1 2 LC L L 1 1 y u c q c x1 C C 1 x 0 1 0 x 1 1 R 1 u x x 2 L L LC 2 1 x1 y 0 输出方程 C x 2
n 1 n 1 2 2 n 1 1 n
写成向量矩阵形式
(t ) Ax (t ) Bu(t ) x y (t ) Cx(t ) Du(t )
x (t ) x (t ) x(t ) x (t )
1 2 n
0 0 A a n
线性定常系统
对于线性定常系统,状态空间表达式中各元素均为 常数,即 x (t ) Ax (t ) Bu(t )
y (t ) Cx(t ) Du(t )
a a a
1n 2n nn
a a A a
11
21
a a a
12
22
a11
u1
课件-现代控制理论-刘豹第三版-第5章

能控性与能观性的判别方法
能观性判别方法
能控性判别方法
表示系统是否可以通过输入控制实现任意状态转移。若系统完全能控,则可以通过设计合适的控制器实现任意状态轨迹的跟踪或镇定;若部分能控或不能控,则存在状态无法被有效控制的风险。
能控性的物理意义
表示系统状态是否可以通过输出完全反映出来。若系统完全能观,则可以通过观测输出信号来准确估计系统状态;若部分能观或不能观,则存在状态无法被准确观测的风险,进而影响控制性能的实现。
控制系统稳定性分析是控制理论的核心内容之一,对于确保控制系统的正常运行具有重要意义。
章节内容结构
稳定性概念及定义
介绍稳定性的基本概念和定义,包括Lyapunov稳定性和BIBO稳定性等。
线性系统稳定性判据
详细阐述线性系统稳定性的判据,如Routh-Hurwitz判据、Nyquist判据和Bode图等。
图解法
状态转移矩阵的计算方法
1
2
3
状态转移矩阵反映了系统在时间间隔内从初始状态到最终状态的动态变化过程。
描述系统状态的动态变化过程
若系统稳定,则状态转移矩阵将逐渐趋于零,表示系统状态将逐渐趋于稳定。
反映系统稳定性
状态转移矩阵是进行系统分析和设计的重要工具,可用于研究系统的稳定性、能控性、能观性等性质。
非线性系统稳定性分析
介绍非线性系统稳定性分析方法,如相平面法、Lyapunov直接法等。
熟练掌握线性系统稳定性的判据和分析方法,能够应用所学知识分析和设计线性控制系统。
了解非线性系统稳定性分析方法的基本原理和应用范围,能够运用所学知识分析和设计简单的非线性控制系统。
掌握稳定性的基本概念和定义,理解不同稳定性定义之间的联系与区别。
第5章-线性定常系统的综合2

6
5.1 线性反馈控制系统的基本结构及其特性
5.1.3 从输出到x 的反馈
结构图如下:
u
B
x
x
C
y
A
G
x Ax Bu
y
Cx
Du
若D=0,则
x Ax Bu Gy Ax Bu G(Cx Du) (A GC)x (B GD)u
y Cx Du
x ( A GC)x Bu y Cx
0 1 0 0
x 0 0
1
x
0 u,
0 2 3 1
y 10 0 0 x
25
5.2 极点配置问题
(2)加入状态反馈 K k0 k1 k2
闭环特征多项式为:
f () I ( A bK ) 3 (3 k2 ) 2 (2 k1) (k0 )
(3)由期望的闭环极点可得期望的特征多项式:
5
5.1 线性反馈控制系统的基本结构及其特性 D=0 时,闭环系统传递函数
WH (s) C[sI ( A BHC)]1 B
原受控系统传递函数为:
W0 (s) C(sI A)1 B
则还有以下关系式成立:
WH (s) W0 (s)[I HW0 (s)]1
或
WH (s) [I W0 (s)H ]1W0 (s)
16
5.2 极点配置问题 闭环系统的特征多项式:
f () I ( A bK ) n (an1 kn1) n1 (a1 k1) (a0 k0 )
(3) 欲使闭环极点与期望的极点相符,必须满足:
f () f *()
ai ki ai*
ki ai ai*
K a0 a0* a1 a1*
得: u (I HD)1(HCx v) 代入受控系统:
5.1 线性反馈控制系统的基本结构及其特性
5.1.3 从输出到x 的反馈
结构图如下:
u
B
x
x
C
y
A
G
x Ax Bu
y
Cx
Du
若D=0,则
x Ax Bu Gy Ax Bu G(Cx Du) (A GC)x (B GD)u
y Cx Du
x ( A GC)x Bu y Cx
0 1 0 0
x 0 0
1
x
0 u,
0 2 3 1
y 10 0 0 x
25
5.2 极点配置问题
(2)加入状态反馈 K k0 k1 k2
闭环特征多项式为:
f () I ( A bK ) 3 (3 k2 ) 2 (2 k1) (k0 )
(3)由期望的闭环极点可得期望的特征多项式:
5
5.1 线性反馈控制系统的基本结构及其特性 D=0 时,闭环系统传递函数
WH (s) C[sI ( A BHC)]1 B
原受控系统传递函数为:
W0 (s) C(sI A)1 B
则还有以下关系式成立:
WH (s) W0 (s)[I HW0 (s)]1
或
WH (s) [I W0 (s)H ]1W0 (s)
16
5.2 极点配置问题 闭环系统的特征多项式:
f () I ( A bK ) n (an1 kn1) n1 (a1 k1) (a0 k0 )
(3) 欲使闭环极点与期望的极点相符,必须满足:
f () f *()
ai ki ai*
ki ai ai*
K a0 a0* a1 a1*
得: u (I HD)1(HCx v) 代入受控系统:
线性定常连续系统的可控性和可观性
其中X 为n×1阶矢量,U 为r×1阶矢量,G 为n×n 阶矩阵,H 为
n×r 阶可控矩阵,那么离散系统(5-14)可控的充要条件是可控
判别阵:
的秩等于n。
第5章 系统的可控性和可观性
例5-5-已知某离散系统的系统矩阵G 和输入矩阵H 分别
为
试分析系统可控性。
解
我们可以从 M 阵的前3个列明显看出,Rank(M)=3=n,即
注意:Σc1 中的βi 与Σc2 中的βi 不是同一数值。
第5章 系统的可控性和可观性
Σc1 的模拟结构图如图5-4所示,Σc2 的模拟结构图如图5-5
所示。
图5-4 可控Ⅰ型模拟结构图
第5章 系统的可控性和可观性
图5-5-可控Ⅱ型模拟结构图
第5章 系统的可控性和可观性
Σc1(Ac1,bc1,Cc1)和Σc2(Ac2,bc2,Cc2)之所以称为可控型,主要
先看式(5-33):
第5章 系统的可控性和可观性
第5章 系统的可控性和可观性
再看式(5-34),两边同时左乘Tc2 ,得新关系Tc2 bc2=b。将
式(5-30)的Tc2和式(5-26)
的bc2代入,很容易就得以证明。
再看式(5-35),有
实际上,该式只给出Cc2的计算公式,Cc2没有像Ac2,bc2那样的固
第5章 系统的可控性和可观性
定理5.7 系统完全可观的充要条件是可观判别阵
的秩为n。
第5章 系统的可控性和可观性
例5-6 判别系统
的可观性。
解
因为 Rank(M)=2=n,所以系统可观。
第5章 系统的可控性和可观性
5.4 离散时间系统的可观性
定义5.4 考虑如下线性定常离散系统:
现控第五章
系统维数不变;
选择K改变系统特征值(闭环极点),改善系统性能。
输出——参考输入v反馈 原系统:
x Ax Bu y Cx
r 1
参考输入
m 1 输出
u v Hy
反馈控制律:
r 1
r m实反馈增益矩阵
输出——参考输入 x ( A BHC)x Bv 反馈闭环系统 y Cx
状态
反馈控制律:
r 1
状态反馈闭 环系统:
r n 实反馈增益矩阵
x ( A BK )x Bv y Cx
状态反馈
原系统:
x Ax Bu y Cx
反馈控制律:
u v Kx
x ( A BK )x Bv y Cx
0 1 s 10k3
( s) s 3 (10k3 1) s 2 (10k2 10k3 2) s (10k1 10k2 20k3 )
希望的特征多项式:
d ( s) ( s 5)( s 2 2 j )( s 2 2 j ) s 3 9s 2 28s 40
输出参考输入反馈不影响系统的可控性和可观性输出参考输入反馈不影响系统的可控性和可观性gybuaxcx输出状态微分反馈闭环系统输出状态微分反馈不影响系统的可观性输出状态微分反馈不影响系统的可观性52极点配置问题利用状态反馈或者输出反馈使闭环系统的极点位于希望的位置
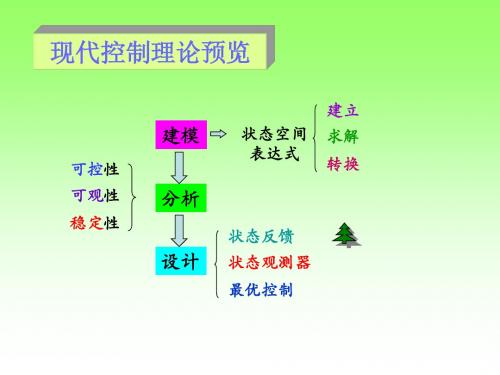
现代控制理论预览
建立
建模
可控性 可观性 稳定性
不可观
例:分析引入状态反馈后的可控性和可观性。
0 1 0 x x 1 u 1 0 y 0 1 x
解: W(s) C( sI A) 1 B
选择K改变系统特征值(闭环极点),改善系统性能。
输出——参考输入v反馈 原系统:
x Ax Bu y Cx
r 1
参考输入
m 1 输出
u v Hy
反馈控制律:
r 1
r m实反馈增益矩阵
输出——参考输入 x ( A BHC)x Bv 反馈闭环系统 y Cx
状态
反馈控制律:
r 1
状态反馈闭 环系统:
r n 实反馈增益矩阵
x ( A BK )x Bv y Cx
状态反馈
原系统:
x Ax Bu y Cx
反馈控制律:
u v Kx
x ( A BK )x Bv y Cx
0 1 s 10k3
( s) s 3 (10k3 1) s 2 (10k2 10k3 2) s (10k1 10k2 20k3 )
希望的特征多项式:
d ( s) ( s 5)( s 2 2 j )( s 2 2 j ) s 3 9s 2 28s 40
输出参考输入反馈不影响系统的可控性和可观性输出参考输入反馈不影响系统的可控性和可观性gybuaxcx输出状态微分反馈闭环系统输出状态微分反馈不影响系统的可观性输出状态微分反馈不影响系统的可观性52极点配置问题利用状态反馈或者输出反馈使闭环系统的极点位于希望的位置
现代控制理论预览
建立
建模
可控性 可观性 稳定性
不可观
例:分析引入状态反馈后的可控性和可观性。
0 1 0 x x 1 u 1 0 y 0 1 x
解: W(s) C( sI A) 1 B
线性系统第5章
t t 0
若 与 t 0 无关,则称这种平衡状态是一致稳定的
线性系统理论 第5章
( , t0 )
xe
图1
李亚普诺夫意义下的稳定
线性系统理论 第5章
f ( x, t ) x(t 0 ) x0 渐近稳定 称自治系统 x 的孤立平衡状态xe=0在时刻t0为渐近稳定,如果
ⅰ) xe=0在时刻t0为李亚普诺夫意义下稳定,
线性系统理论 第5章
第5章 系统运动的稳定性
5.1 外部稳定性和内部稳定性 定义1:称一个系统的外部稳定(有界输入-有界输出稳 定,简称BIBO)是指对任何一个有界输入u(t),即:
‖u(t)‖≤β1<∞
对应的输出y(t)均为有界,即
t [t 0, )
y(t ) 2 t [t 0 ,)
线性系统理论 第5章 结论1[线性时变系统BIBO稳定]:对零初始条件p维输 入和q维输出连续时间线性时变系统,t∈[t0,+∞),则
t0时刻系统BIBO稳定的充分必要条件为,存在一个有
限正常数β,使对一切t∈[t0,+∞)脉冲响应矩阵H(t,τ)所
有元均满足关系式
t
t0
hij (t , ) d i 1,2,q
结论3:对零初始条件p维输入和q维输出连续时间线 性时不变系统,令初始时刻t0=0,则系统BIBO稳定的 充分必要条件为:真或严真传递函数矩阵G(s)的所有 极点均具有负实部。
线性系统理论 第5章 考虑n维连续时间线性时变自治系统 A(t ) x x(t 0 ) x0 t [t 0 , ) x 定义2:称连续时间线性时变系统在t0为内部稳定,是 指由时刻t0任意非零初始状态x0引起的零输入响应X0u(t) 对t∈[t0,+∞)有界,并满足渐近属性,即:
线性系统理论第5章
0 0 0 1 & 0 x + 0 u, 例 5- 1 x = 1 −6 0 1 0 − 12 期 望 极 点 为 λ1* = - 2, λ 2*,3 = − 1 ± j, 求 状 态 反 馈 向 量 k。
解:首先由能控性矩阵判断系统的能控性:
−1
72 18 1 (6)k = kP −1 = [ 4 −66 −14] 12 1 0 1 0 0 1 0 0 = [ 4 −66 −14] 0 1 −12 = [ −14 186 −1220] 1 −18 144
Ac A − bk = 0 A −b k A12 bc k1 k2 = c c 1 − Ac 0 0 A12 − bc k2 Ac
x
相应的闭环系统特征多项式为:
det[ sI − ( A − bk )] = det[ sI − ( A − bk )] sI − Ac + bc k1 = det 0 − A12 + bc k2 = det( sI − Ac + bc k1 ) ⋅ det( sI − Ac ) sI − Ac
* (3) ϕ * ( s ) = ( s − λ1* )( s − λ2 )( s − λ3* ) = s 3 + 4 s 2 + 6 s + 4
* * * (4)k = k0 k1 k2 = a0 − a0 a1 − a1 a2 − a2 = [ 4 − 0 6 − 72 4 − 18] = [ 4 −66 −14]
1 0 0 () 解:1 Qc = b Ab A2b = 0 1 −6 ,能控 0 0 1 0 0 s (2)ϕ ( s) = det( sI − A) = det −1 s + 6 0 = s 3 + 18s 2 + 72s 0 −1 s + 12
线性系统理论(第五章)
x0 − xe
≤ δ ( ε , t 0 ) 的任一初态 x 0 出发的受扰
S (ε )
S (δ )
运动都同时满足不等式: 运动都同时满足不等式:
φ (t ; x0 , t0 ) − xe ≤ µ
∀ t ≥ t0 + T ( µ ,δ , t0 )
运动的有界性。 运动的有界性。
x0 xe
φ (t ; x0 , t0 )
001
系统运动的稳定性
讨论内部稳定性。 讨论内部稳定性。 李亚普诺夫方法(А.М.Ляпунов) Ляпунов) 李亚普诺夫方法( 线性系统 定常系统 非线性系统 ; 时变系统 ; 离散时间系统。 离散时间系统。
连续时间系统
002
系统运动的稳定性
5.1 外部稳定性和内部稳定性 外部稳定性 考虑一个线性因果系统,如果对应于一个有界的输入 u ( t ) , 考虑一个线性因果系统, 即满足条件: 即满足条件:
G ( t ) 为其脉冲响应矩阵, ˆ ( s ) 为其传递函数矩阵,则系统 G 为其脉冲响应矩阵, 为其传递函数矩阵,
为 B I B O 稳定的充分必要条件是,存在一个有限常数 k , 稳定的充分必要条件是,
j = 1, 2 , L , p ) 均满足关系式: 均满足关系式:
G (t )
的每一个元
大范围渐近稳定为全局渐近稳定。 大范围渐近稳定为全局渐近稳定。 小范围渐近稳定为局部渐近稳定。 小范围渐近稳定为局部渐近稳定。 大范围渐近稳定,除了原点平衡状态外, 大范围渐近稳定,除了原点平衡状态外,不存在其它孤立平 衡点。 衡点。 线性系统渐近稳定==大范围渐近稳定 线性系统渐近稳定==大范围渐近稳定。 大范围渐近稳定。
006