新时达调试说明书OH1000
新时达机器人系统说明书.
5.1.4点动运行(53
5.1.5机械终端限位(53
5.1.6软件限位开关(53
5.2相关人员(53
5.2.1操作人员资格要求(54
5.2.2设备操作规程的规定(54
5.3培训(54
5.4安全措施(55
5.5检查(56
1机器人系统
1.1机器人组成
1机器人
2机器人控制柜
图1. 3机器人各轴说明
图1. 4 SA1400机器人各关节运动示意图1.2.3各关节电机说明
图1. 5 1,2,3,4轴电机位置示意图
图1. 6 5,6轴电机在内部
1.2.4各轴机械零点说明
图1. 7一轴零点二轴零点
图1. 8三轴零点四轴零点
图1. 9五轴零点六轴零点可随意定
1.2.5机器人铭牌
图1. 10机器人铭牌位置图
1控制器及其安装板
2伺服驱动及其安装板
3电力安装板1
4断路器及其安装板
5接触器
6开关电源
7主电端子8控制电端子
9控制柜斜面板(可定制
图1. 13 SRC2控制柜内部示意图
1.3.3控制柜背面说明
下图是控制柜SRC2的背面结构示意图。
1示教器及其支架
2风扇及其安装板
3电力安装板2
4滤波器
5制动电阻(选配
2.2 STEP伺服说明(21
2.3安全逻辑板说明(27
2.4柜冷却装置说明(28
2.5 I/O模块(28
2.6软件功能介绍(29
3机器人标定和性能测试(30
3.1.1标定工具DynCal (30
3.1.2标定过程(30
3.2机器人性能测试(30
3.2.1性能测试工具CompuGauge (31
新时达STEP系统调试说明书

一.新时达电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1. 机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2. 运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)3. 矢量控制相关PI参数设置。
(比例增益,积分时间等)如果机械系统方面存在着问题,主板参数和变频器参数也只能是使舒适感更好一些,而无法根本改变机械缺陷。
三.舒适感的性能指标1. 电梯起动舒适感起动是否平稳,有无台阶感、振动等;2. 电梯高速运行中舒适感高速运行是否平稳,有无振动、晃动等;3. 电梯停车舒适感平层停车是否平稳可**有无制动感、振动等;以上三点舒适感须作重点考虑并调试。
四、电梯调试流程概述及要点1. 线路检查,包括:通电前线路检查,通电后线路检查2. 曳引机整定旋编安装,参数设置,曳引机自整定3. 慢车运行安全回路,门锁回路,上、下限位,上、下强慢4. 井道学习井道各开关,平层感应器,井道学习,井道学习数据保存5. 快车运行单层、双层、多层、顶层、底层运行,冲顶沉底试验6. 舒适感调试机械调整,运行曲线设定,速度环PI值,(电流环PI值)7. 功能检查按合同要求逐一测试各项标准功能和特殊功能,8. 平层调整平层精度测量记录,平层感应器插板调整,相应平层参数调整五.标准参数在实践中,我们总结出了一套标准参数,这就是下面我们所说的推荐参数,效果比较理想。
模拟量速度给定舒适感的调试一. SM-01主板相关参数的调整电梯准备运行,先打开抱闸,经F16(打开抱闸机械延时时间)后,开始按S曲线运行:起动起动过渡时间T0 匀加速F0 加速末过渡时间T1 匀速运行初减速过渡时间T2 匀减速F1 平层信号检测减速停车过渡时间T3 消号停车,经F17(释放抱闸机械延时时间)后,抱闸、开门。
参数号参数名称推荐值及范围参数范围F16 抱闸延时1 10(5~12) 电梯起动时,先打开抱闸,经过此延时后才给出速度。
新时达-奥莎(sigriner)电梯门机专用变频器调试手册
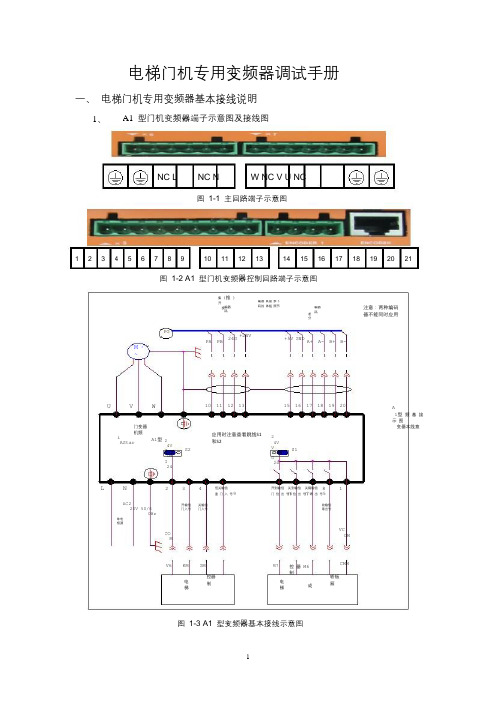
1 2 3 1、L U 4 单电 相源iAStarAC220V 50/60HzN5 3M ~门变器机频V6 A1型 W7 V6COM2PG8 224V C OM G 249 NC L 电 梯KMS23开输信 门入号344 GM关输信门入号10 控器制110PAPB 集 (推 ) 开挽 低关输信速 门 入 号911 NC N 11 91应用时注意查看跳线S1和S212 24G+24V1编器码13 112 一、 电梯门机专用变频器基本接线说明A1 型门机变频器端子示意图及接线图图 1-1 主回路端子示意图图 1-2 A1 型门机变频器控制回路端子示意图电梯门机专用变频器调试手册图 1-3 A1 型变频器基本接线示意图13 编器 码的 具接 体线 参下 照节2M715+5V GNDA+ 差 分编器码 1开到输信门 位 出 号6电 梯2 4V V COM G 2414 控 器 M6 制关到输信门 位 出 号7 S116 1315 或41关障输信门 碍 出 号517 18 A- B+ B-116 故输信 障出号89W NC V U NC轿板厢119 20 117 CMM1VCOM118 注意:两种编码器不能同时应用19 20 A1型 频 基 接示 图变器本线意211 2 2、L 3 U iAStar4 单电 相源AC 0V 50 0H 22/6 zN5 3 M ~门变器机频V6 A2型W7 PG8 NC L S1 9V6COM9 224 V VC OMG2 410 电 梯KMS2 19 PA 编器码1开输信 门入号集 (推 )开挽2 1011 NC N 控器制21GMPB编器 码的 关输信 门入号112021 24G具接 体线 参下 照节 1224 V COM G2 412 低关输信速 门 入 号12A2 型门机变频器端子示意图及接线图图 1-4 主回路端子示意图图 1-5 A5 型变频器控制回路端子示意图图 1-6 A2 型变频器基本接线示意图22 +24VCMM开到输信 门位出号1213 K1开到输信门 位 入 号13应用时注意查看跳线S1和S21414 端 子29K2关到输信门 位 入 号14232M7电梯控器制15 控 制 K3开减输信门 速 入 号15 16 时 的 49关到输信 门位出号M6或四 个 K423关减输信门 速 入 号16564217 W NC V U NC限 位 关障输信 门碍出号18 端 子K5备输信 用入号17 72轿板厢故输信 障出号COM21COM18819 20 21 22A2型 频 基 接示 图变器本线意二、注意事项1、适配编码器A1 型变频器可选用三种编码器输入信号——推挽、开路集电极、差分编码器。
曳引新时达电梯一体机电气调试手册12-3-9

、调试流程框图……………………………………………………………………………………………:功能参数表………………………………………………………………………………………:故障代码说明重要提示:调试流程框图通电前检查控制系统电气线路安装完毕后,通电前必须对电气部分进行检查:应对照电气图纸,检查各部分的连接是否正确。
送电检查)检查控制柜内所有熔断器,)确认所有接线均正确无误后,将手持服务器连接至主板的控制柜开关拨到“检修”2.4V(2.2~2.5V)TXV+ TXV- TXA+ TXA-设置主板参数)控制系统正常通电后,为了方便接下来的调试,建议首先参照本手册附录值将全部参数设置一遍。
个别需根据实际情况调整的参数,可在相应步骤中根据具体的合同值或者参数名称电梯额定速度电机额定转速预设总层数检修速度驱动控制器规格减速开关级数井道自学习速度电机原点自学习将曳引机钢丝绳安全脱离曳引轮,电梯参数按表确认变频器输出相序UVW与电机相序对应,编码器连接正确,编码器屏蔽线已可靠固定整定完成后自动退到主菜单,抱闸在电机原点自学习完成之后,由于一个方向溜车的现象。
所以必须重新检查和设置合适的可以参照下表进行设置:慢车试运行及检修运行检查)通过慢车试运行的程序来检查电梯运行指令的方向与电机实际转动方向是否正确一致,试时电梯无法预知的转动而导致的损害。
) 检修运行检查通过以上步骤的调整,异,如果空载电流或者速度差异偏大,则必须在电梯带负载运行前重新校正。
以尽量避免由于电机检修单梯=== 00000018 = 挂上钢丝绳进行井道检修运行检查,逐层检查各层厅门,不得与轿厢部件干涉碰撞通讯线路检查确认一体机主板CAN1图8.1 SM-02-D板通讯终端电阻设置,按上或下按钮调整图8.2 SM-04-HRF板通讯终端电阻设置调整门机和光幕)断开控制柜SAD2)调整厅、轿门相关机械部件,确保不带电时开关门自由顺畅;监视状态井道楼层数据学习平层装置位置调整)轿厢与厅门地坎保持水平时,平层插板的上端高出下平层开关、下端低于上平层开关的长度均是采用压导板经此两孔将隔磁板安装于平层位置的导轨上须保证每层的隔磁板均居中于磁感应器内,以免轿厢运行时造成碰撞!注:上平层开关安装在下面,而下平层开关安装在上面。
新时达一体机参数设置 (3)

新时达一体机参数设置1.模拟量速度曲线配置:F0:加速斜率,F1:减速斜率,F2:S曲线T0,F3:S曲线T1,F4:S曲线T2,F5:S曲线T3。
2. 基本参数配置:F6:电梯额定速度,F7:电机额定转速,F8:编码器每转脉冲数,F11:总楼层数。
3. 启动和停车时序参数:F16 开闸延时:从变频器运行信号给出到开始打开报闸的延时时间.F17 抱闸延时:从开始上抱闸到去除变频器运行方向的延时.F58 启动曲线延时:从打开抱闸到速度曲线给出的延时时间.F59 速度到0后经过F59时间上抱闸.F122 检修去方向延时,检修时断开抱闸接触器到去掉运行方向的延时时间.4并联群控参数设置:F23 :并联模式设3互为并联方式.设2为群控方式.F181:互为并联电梯编号,设0为主梯,设1为副梯.5输入类型设置:F25 X0-X15常开常闭设定F26 X16-X25常开常闭设定F27 TX0-TX15常开常闭设定F28 TX16-TX19常开常闭设定6服务层站设置:F29 设置1-16层停靠F30 设置17-32层停靠F31 设置33-48层停靠7一体化驱动控制器规格选择参数:F32:5.5kw设0; 7.5kw设1;11kw设2; 15kw设3;18.5kw设4; 22kw设5;30kw设6; 37kw设7;8自动运行设置:F33 自动运行间隔F34 自动运行次数设置完F33和F34后请在轿内登记指令信号来触发自动运行功能.9抱闸开关检测:F36 设0 无抱闸开关检测设1 中国地区标准设2 香港地区标准10司机外呼蜂鸣闪烁功能:F43 设0 无蜂鸣无闪烁设1 有蜂鸣无闪烁设2 无蜂鸣有闪烁设3 有蜂鸣有闪烁11串行通讯地址:F44 串行通讯本机地址,小区监控时需设置,以便远程电脑区分主板. 12设置开门:F50 开门允许1-16层.F51 开门允许17-32层.F52 开门允许33-48层.F53 后门允许1-16层.F54 后门允许17-32层.F55 后门允许33-48层.13 KMC检测模式:F60 :设0 KMC前置,常通,不检测.设1 KMC前置,常通,粘连检测.设2 KMC前置,每次运行后通断,粘连检测.设3 KMC后置,每次运行后通断,粘连检测.14打滑保护时间限制:F62快车全程运行加10S和45S取小值范围在20S-45S之间15楼层显示代码:F65-F112:对应1-48层楼层显示16强迫关门开门保持时间:F117:强迫关门或者开门保持按钮(TX18)按过后的开门保持时间设定值17残疾人开门保持时间:F118:残疾人开门保持时间设定值18防捣乱功能:F120:设0 无此功能设1 按光幕动作计算(连续3层停靠没有光幕动作)设2-64 防捣乱指令数(根据轻载开关来检测)19强迫关门功能:F121设0 不开通设1 开通20召唤分类功能:F123设0 只有前门召唤(地址1-48)设1 有前门召唤(地址1-48)和后门召唤(地址49-96)设2 有前门召唤(地址1-48)和残疾人召唤(地址49-96)设3 有前门召唤(地址1-32),后门召唤(地址33-64)和残疾人召唤(地址65-96) 21前后门控制模式:F128设0 前后门分开控制(有前后门操纵箱)设1 前后门一起控制(只有一个操纵箱)22提前开门功能:F129设0 没有提前开门和开门再平层功能设1 有提前开门功能设2 有开门再平层功能设3 既有提前开门又有开门再平层功能23开关门力矩保持功能设定:F130设0 无开关门力矩保持设1 有开门力矩保持设2 有关门力矩保持设3 有开关门力矩保持设4 运行中有关门力矩保持24 NS-SW功能设定:(对应02板输入TX16)F137NS-SW功能时设定服务楼层1-16层F138NS-SW功能时设定服务楼层17-32层F139NS-SW功能时设定服务楼层33-48层25称重模式:(匹配STEP称重装置)F164设0 系统不处理称重设1 称重信号通过CAN通讯输入主板,超满载信号也通过CAN通讯输入.设2 称重信号通过CAN通讯输入主板,超满载信号通过轿箱板输入.26调试不开门模式:F165设0 调试时电梯开门设1 检修时禁止门动作设2 调试时电梯不开门设3 检修时禁止门动作和调试时电梯不开门27速度增益:F180 对速度给定峰值的增益出厂值100028井道中减速开关的级数:F182井道中安装有几道强迫减速开关.该参数设置不当会导致井道学习失败.29井道学习速度:F183模拟量给定时井道自学习速度.30井道学习:1.电梯检修开到最底层平层;2.触发手持操作器中的井道学习菜单;3.转自动,电梯会以井道学习速度上行,直到最顶层停止;4.井道学习完成,可以运行快车.31井道学习不成功的原因:1.自学习的插板数和总楼层数不一样;2.平层插板太长或者太短:(平层插板长度+ 平层开关间距)/2 的距离小于100mm或者大于900mm ;3.平层区太长或太短:(平层插板长度- 平层开关间距)/2 的距离小于10mm 或者大于200mm32减速开关级数(F182)与实际安装减速开关数不一致;5.减速开关的距离不符合规定;33井道数据含义(通过监控界面):1: 下端站平层基准位置0 mm2: 2 楼平层离开下端站平层位置(mm)3: 3 楼平层离开下端站平层位置(mm)4: 4 楼平层离开下端站平层位置(mm)64: 64楼平层离开下端站平层位置(mm)65: 平层插板的长度(以2 楼的插板为基准,mm)66: 平层感应器间距(mm)67: 上行1 级减速开关到上端站的距离(mm)68: 上行2 级减速开关到上端站的距离(mm)69: 上行3 级减速开关到上端站的距离(mm)70: 上行4 级减速开关到上端站的距离(mm)71: 下行1 级减速开关到下端站的距离(mm)72: 下行2 级减速开关到下端站的距离(mm)73: 下行3 级减速开关到下端站的距离(mm)74: 下行4 级减速开关到下端站的距离(mm)34同步电机自整定:触发手持操作器中电机自学习菜单,检修上行,从电机负载侧看,电机应该顺时针转,如反,可交换主机V,W相,整定完毕会自动上闸,整定出的角度储存在参数F228中。
新时达调试指导说明
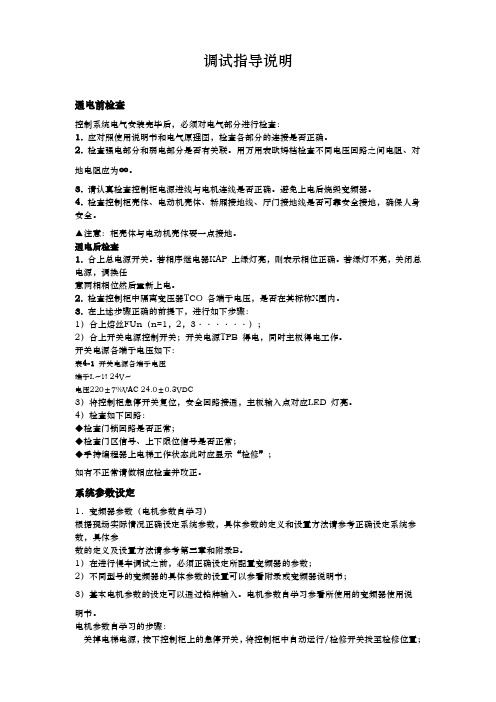
调试指导说明通电前检查控制系统电气安装完毕后,必须对电气部分进行检查:1. 应对照使用说明书和电气原理图,检查各部分的连接是否正确。
2. 检查强电部分和弱电部分是否有关联。
用万用表欧姆档检查不同电压回路之间电阻、对地电阻应为∞。
3. 请认真检查控制柜电源进线与电机连线是否正确。
避免上电后烧毁变频器。
4. 检查控制柜壳体、电动机壳体、轿厢接地线、厅门接地线是否可靠安全接地,确保人身安全。
▲注意:柜壳体与电动机壳体要一点接地。
通电后检查1. 合上总电源开关。
若相序继电器KAP 上绿灯亮,则表示相位正确。
若绿灯不亮,关闭总电源,调换任意两相相位然后重新上电。
2. 检查控制柜中隔离变压器TCO 各端子电压,是否在其标称X围内。
3. 在上述步骤正确的前提下,进行如下步骤:1)合上熔丝FUn(n=1,2,3······);2)合上开关电源控制开关;开关电源TPB 得电,同时主板得电工作。
开关电源各端子电压如下:表4-1 开关电源各端子电压端子L~N 24V~电压220±7%VAC 24.0±0.3VDC3)将控制柜急停开关复位,安全回路接通,主板输入点对应LED 灯亮。
4)检查如下回路:◆检查门锁回路是否正常;◆检查门区信号、上下限位信号是否正常;◆手持编程器上电梯工作状态此时应显示“检修”;如有不正常请做相应检查并改正。
系统参数设定1.变频器参数(电机参数自学习)根据现场实际情况正确设定系统参数,具体参数的定义和设置方法请参考正确设定系统参数,具体参数的定义及设置方法请参考第三章和附录B。
1)在进行慢车调试之前,必须正确设定所配置变频器的参数;2)不同型号的变频器的具体参数的设置可以参看附录或变频器说明书;3)基本电机参数的设定可以通过铭牌输入。
电机参数自学习参看所使用的变频器使用说明书。
电机参数自学习的步骤:关掉电梯电源,按下控制柜上的急停开关,将控制柜中自动运行/检修开关拨至检修位置;确认主机抱闸线已正确接在控制柜ZQ1、ZQ2 端子上;吊起轿厢,移去主机曳引轮上的钢丝绳,并加以保护,以防磨损;确认主机曳引轮及其他运转部件在运行时无阻碍;跨接线:保证安全回路102-114 为通路,门锁回路120-118 为通路;将主板上的输出接触器Y0,Y1,Y2,Y3 和其公共端上对应的线拆下,并作好标记,合并在一起,用绝缘胶带缠好,以防短路。
新时达调试资料
STEP串行调试注意事项串行系统调试说明(以F板为例)一.电梯调试注意事项所有进行电梯安装、调试必须注意安全,遵守安全操作规范。
二.电梯运行舒适感相关的因素主要有:1.机械因素;(导轨垂直度、表面平整、连接处、导靴松紧,钢丝绳张力均匀等)2.运行曲线相关参数设置;(加速度,减速度,S曲线弯角时间,起动抱闸延时,停车抱闸延时等)?3.矢量控制相关PI参数设置。
(比例增益,积分时间等)匀加速F0??????F16 抱闸延时1 10(5~12)电梯起动时,先打开抱闸,经过此延时后才给出速度。
一般不调,起动时有明显延时即可。
如果带闸起动,则调大此延时;如果起动有倒溜,可适当调小。
F17 抱闸延时2 5(5~12)电梯停止时,先降为零速,经过此延时后才合上抱闸。
一般不调,停车时有明显延时即可。
如果抱闸动作太快,停车太急,可适当调大;如果抱闸太慢,停车回溜,可适当调小,也可调抱闸机械结构。
F0 加速斜率a1 50(40~65)此值越小,加速越平稳,太小则效率不高。
越大加速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OC”过电流故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F1 减速斜率a2 50(40~65)此值越小,减速越平稳,太小则效率不高;越大减速越急:①太急则用户感觉不太舒适,②太急易引起变频器出现“OV”过电压故障。
一般1m/s为40;1.5~1.8m/s为50;2.0m/s为60较为合适。
F2 S曲线T0 130(130~160)T0:起动到加速段初的过渡时间曲线,调大起动更平稳。
此时段电梯速度很低,太长易出现电动机拖不动电梯的现象致使变频器出现“PGO”故障,或过电流“OC”故障,尤其轿厢重载满载时。
F3 S曲线T1 110(100~120)T1为加速段末到最高速度间的过渡时间曲线,T2为最高转速到减速段初的过渡时间曲线。
T1和T2对舒适感没有明显的影响,一般不调。
新时达便捷调试手册
快车调试:
1. 电梯机械安装到位,安全,门锁接通,动作正常(不可以短接);
2. 门机工作开关门正常,开关门到位信号工作正常接线正确;
3. 平层感应器安装到位,工作正常;
4. 平层插板垂直度,深度到位,没有误动作,不动作等;
12. 调试完毕。
5. 换速开关,限位开关安装到位,工作正常;
6. 随行通讯线接线正确,终端电阻短接正常;万用表测量:TXV-与TXV+,TXA+,TXA-的电压分别是24VDC,2.8VDC,2.6VDC左右,TXA+与TXA-是0.2VDC左右,TXA+与TXA-的电阻是120Ω左右;
7. 主板上对应的X5,X6,X7,X8必须工作正常,平层位置的时候X9,X10亮;检修向上运行时,应该是X10先动作,X9后动作,快到上端站的时候,X7动作,X5动作,同时保证X7动作后必须一直保持动作状态,甚至到X5动作后也要保持,其间不允许有一次复位;同样,检修向上运行时,应该是X9先动作,X10后动作,快到下端站的时候,X8动作,X6动作,同时保证X8动作后必须一直保持动作状态,甚至到X6动作后也要保持,其间不允许有一次复位;
8. 监控主板的液晶或手持操作器,通过监控菜单,开门到位后:TX0,TX1,TX2,TX3必须是“-”,“*”,“*”,“*”,关门到位后:TX0,TX1,TX2,TX3必须是“*”,“-”,“*”,“*”;其他的TX*信号是“-”;
9. 任何位置,进入井道自学习菜单,确认后转正常,电梯会自动返回到一楼,平层后开关门一次,然后电梯自动测楼层高度,到顶楼后,会自动停止运行;表示自学完成;打一下检修,然后转正常;
3. 编码器到PG卡的连接线必须牢靠,准确无误;
新时达机器人系统说明书.
软件
表1. 4软件
步骤说明
11检查机器人配置数据
12无负载情况下对机器人进行校准
13安装工具,并在负载情况下对机器人进行校准
14检查软件限位开关,必要时进行调整
15使用固定工具时:测量外部TCP
1.6.2搬运和拆封
机器人的搬运一般采用吊运和搬运两种,如图1.19,1.20所示。
16示教器外观1钥匙开关3急停开关2选项定位旋钮4a右侧按键4b下方按键4c左侧按键及四个led状态指示灯sp机器人系统说明手册5tftlcd触摸屏7多功能扶手6usb接口保护8三位使能开关9未使用的电缆出口10电缆安装区域11应力消除和弯曲保护连接电缆12触笔示教器上带有停止功能的按钮有3种分别为
请按照控制系统使用说明书的“第二章2.2节2.2.4小节”所示的斜面板介绍,使用线缆组中的1、2两根线缆连接控制柜与机器人本体。
1.6.5机器人控制柜电源连接
1接通机器人控制柜电源。
2解除示教器紧急停止按键的锁定。
3接通主开关。
1.6.6机器人工作状态确认
1机器人系统控制装置的功能如启动、停机、操作方式选择等符合预定要求,
图2. 1 SRM1000正面示意图
上述是运动控制器的所有接口描述,机器人控制系统中使用的接口有:电源接口(X101、Ethernet网口(X102, X106, X107、CAN接口(X104。其中,Ethernet网口的作用如下:
X102:LAN0用于EtherCat总线通讯。
X106:LAN1是调试网口,也可用于一些外接网络通讯。
1控制器及其安装板
2伺服驱动及其安装板
3电力安装板1
4断路器及其安装板
新时达调试说明书OH1000
第八部分调试说明OH1000MRL1.OH1000MRL 控制系统概述OH1000MRL 控制系统引用了德国SCHRITT 的HCB(逻辑控制板作为电梯控制系统的核心,充分吸收了欧洲技术,将电梯的各个部件紧密的连在一起。
驱动部分则采用意大利高精度的矢量变频技术,使电梯的运行更加平稳舒适,同时其流畅简洁的外观也令人赏心悦目。
HCB内部包括四个模块子系统:OCSS操作控制子系统MCSS(运行控制子系统DCSS(门控制子系统DBSS(驱动和制动子系统1.1 下图是OH100MRL0 电梯控制系统基本框图:2. 调试操作2.1 检查控制柜打开控制柜的门,检查是否有连接处松动和元件损坏,保管好随机资料,更换已损坏的部件,紧固控制柜中所有连接处。
紧固时请特别注意电源线、动力线和制动电阻的连接。
HCB OCSS 操作控制DBSS 驱动控制DCSS 门机控制MCSS 运动控制C/C 轿相并行线C/H 厅外显示并行线NTSD EXPXRDS DOLVFBDS DCLDO2000AvyL-M 变频器5LS,6LS 端站限位开关INS,ERO 检修开关安全回路测速(2048 无齿轮电动机对重轿厢LWO 超载LWX 满载1LS,2LS 端站减速开关ULZ 、DLZ 门区信号按接线图,检查PVT线、随行电缆的临时接线、限位开关的临时接线,检查每个设备的接地线是否可靠接地。
2.3绝缘检查脱开接地线和HL的连接,拔出HCB上的所有插件,将所有的空气开关都置于“OFF位置,用绝缘表测量地线和HL、电源线、电机动力线、抱闸线圈、门机、照明两端的绝缘电阻值,确保绝缘电阻值在规定值之内。
重新接上地线和LCBII 板上的插件。
2.4 抱闸清洗和调节2.4.1清洗抱闸2.4.1.1 按上锁挂牌程序,将电梯控制柜断电。
2.4.1.2 由于轿厢的空载重量比对重轻,为确保人身和设备的安全,在拆抱闸前必须将电梯的对重完全压在缓冲器上。
2.4.1.3 松开抱闸弹簧两端的螺母和锁紧螺母,慢慢取出弹簧,此时要注意,如果缓冲器未被完全压缩,轿厢会移动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第八部分调试说明OH1000MRL1.OH1000MRL控制系统概述OH1000MRL控制系统引用了德国SCHRITT的HCB(逻辑控制板作为电梯控制系统的核心,充分吸收了欧洲技术,将电梯的各个部件紧密的连在一起。
驱动部分则采用意大利高精度的矢量变频技术,使电梯的运行更加平稳舒适,同时其流畅简洁的外观也令人赏心悦目。
HCB内部包括四个模块子系统:OCSS(操作控制子系统MCSS(运行控制子系统DCSS(门控制子系统DBSS(驱动和制动子系统1.1下图是OH100MRL0电梯控制系统基本框图:2. 调试操作2.1 检查控制柜打开控制柜的门,检查是否有连接处松动和元件损坏,保管好随机资料,更换已损坏的部件,紧固控制柜中所有连接处。
紧固时请特别注意电源线、动力线和制动电阻的连接。
HCB OCSS 操作控制 DBSS 驱动控制DCSS 门机控制 MCSS 运动控制 C/C 轿相并行线 C/H 厅外显示并行线G/H 厅外按钮并行线XRDS DOL VFBDS DCLDO2000AvyL-M 变频器5LS,6LS 端站限位开关INS,ERO 检修开关安全回路测速(2048 无齿轮电动机对重轿厢LWO 超载 LWX 满载1LS,2LS 端站减速开关ULZ 、DLZ 门区信号NTSD EXP2.2接线检查按接线图,检查PVT线、随行电缆的临时接线、限位开关的临时接线,检查每个设备的接地线是否可靠接地。
2.3绝缘检查脱开接地线和HL的连接,拔出HCB上的所有插件,将所有的空气开关都置于“OFF”位置,用绝缘表测量地线和HL、电源线、电机动力线、抱闸线圈、门机、照明两端的绝缘电阻值,确保绝缘电阻值在规定值之内。
重新接上地线和LCBII板上的插件。
2.4抱闸清洗和调节2.4.1清洗抱闸2.4.1.1按上锁挂牌程序,将电梯控制柜断电。
2.4.1.2由于轿厢的空载重量比对重轻,为确保人身和设备的安全,在拆抱闸前必须将电梯的对重完全压在缓冲器上。
2.4.1.3松开抱闸弹簧两端的螺母和锁紧螺母,慢慢取出弹簧,此时要注意,如果缓冲器未被完全压缩,轿厢会移动。
2.4.1.4拆开抱闸,清洁铁心和轴销,检查抱闸刹车皮是否干净且与抱闸臂紧固相连。
2.4.1.5将刹车鼓上的灰尘和铁锈清除。
2.4.1.6重新装配抱闸。
2.4.2调节抱闸(制动臂2.4.2.1如下图所时,制动臂的压缩弹簧A动作时的压缩量为5~8mm。
2.4.2.2调整螺杆与制动器触头的间隙,使B≥1.0mm。
2.4.2.3调整螺杆与弹簧锁紧螺栓,使制动臂上磨擦片(闸瓦与曳引轮的间隙C,保证在制动器动作时C≤0.7mm。
2.4.2.4调整制动器后,应保证两边的抱闸应同时打开,在打开时闸瓦不能触碰到曳引轮,关闭时应可靠制动。
2.4.2.5调节好抱闸后,还应调整螺杆D与抱闸检测开关触头E的间隙,保证在制动器关闭时,抱闸检测开关动作(触头被压紧;制动器打开时,检测开关不动作(触头松开。
2.5检查井道2.5.1确认对重重量是否合适。
2.5.2检查各层厅门是否安装完毕,并且已经关上。
2.5.3确认限速器绳已经紧固,限速器开关已经连接。
2.5.4确认导轨已上油。
2.6检查输入电压切断主电源空气开关和控制柜内的其它空气开关,检查三相输入电压是否在规定范围之内(±10%,检查端子排上的照明电压是否为220V±10%。
2.7检查控制变压器输出电压合上主电源空气开关,检查变压器的输出端电压是否和图纸相符。
2.8检查HCB的输入输出电压切断电压,拔去HCB板上的所有插件,然后合上所有的空气开关,用万用表测量HCB的JP1插件的3.1脚和5.6脚,检查电压是否为DC24V±10%,如果不符,请检查电源板的工作情况:2.9上电检查HCB的状态2.9.1切断主电源开关,插上所有的插件。
2.9.2确认控制柜内ERO开关处于检修位置。
2.9.3确认所有的厅门和轿门已经正确关闭。
2.9.4合上主电源开关。
2.9.5观察HCB电子板上的指示灯,检查输入信号是否正确:D10灯为安全回路灯,在亮时表示安全允许。
D11灯为厅门回路灯,在亮时表示厅门锁回路沟通。
D12 D灯为轿门回路灯,在亮时表示全部门锁回路沟通。
D13为检修灯,在亮时表示自动运行回路沟通。
2.10变频器参数设置2.10.1OH1000MRL控制系统变频器参数设定下表为OH1000MRL控制系统中变频器的参数表,其中1.0m/s系统以4.3KW 主机,载重1000kg,平衡系数45%为例。
2.10.2该表中不包括变频器中变频器和主机的参数,自学习参数以及定位数据等,这些数据应该根据实际的变频器、主机进行设置,并通过自学习和定位得到相应的值。
注意:STARTUP/Starup config /Enter setup mode Br/DRIVE DATA /Spd ref /fbk res应设置为0.03125rpm。
菜单/参数参考设定备注1.0m/sSTARTUP/REGULATION MODE Brushless*1 STARTUP/Startup config /Mechanical data/Travel units sel MillimetersGearbox ratio mm 2Pulley diameter rpm 400STARTUP/Startup config /Weights/Cabin weight kg 1150Counter weight kg 1600Load weight kg 1000STARTUP/Startup config /Landing zone/Landing control EnableLanding init src DI 7 monitorLanding distance mm 45Landing ratio % 0STARTUP/Startup config /Encoders config/Speed fbk sel Std encoderStd enc type SinusoidalSinCosStd enc pulses ppr 2048Std dig enc mode FP modeStd enc supply V 5.41Std sin enc Vp V 0.50TRA VEL/Speed profile/Multi speed 1 mm 1000Multi speed 2 mm 50Multi speed 3 mm 200TRA VEL /Ramp profile/*2 Mr0 acc ini jerk mm/s3200 Mr0 acceleration mm/s2500Mr0 acc end jerk mm/s3550Mr0 dec ini jerk mm/s3650Mr0 deceleration mm/s2650Mr0 dec end jerk mm/s3600Mr0 end decel mm/s2500TRA VEL /Lift sequence/Cont close delay ms 200Brake open delay ms 500Brake close dly ms 200Cont open delay ms 300Seq start mode Start fwd/revSeq start sel Starndard inpStart fwd src DI 1Start rev src DI 2Mlt spd 0 src DI 4Mlt spd 1 src DI 5Mlt spd 2 src NULLDoor open src DI 7 monitorDoor fbk src DI 6 monitorDoor open speed mm/s 100Door hold off mm/s 1000TRA VEL /Speed reg gians/*2 SpdP1 gain % % 20.00 SpdI1 gain % % 30.00SpdP2 gain % % 25.00SpdI2 gain % % 45.00SpdP3 gain % % 0.00SpdI3 gain % % 0.00Spd 0 enable DisableSpd 0 P gain% % /Spd 0 I gain% % /TRA VEL /Speed thresholds/*2 Spd 0 speed thr rpm 1Spd 0 spd delay ms 500SGP tran21 h thr % 15.00SGP tran32 l thr % 0.00SGP tran21 band % 10.00SGP tran32 band % 0.00TRA VEL /Pre-torquePre-torque src An inp 1 outputREGULATION PARA/Spd regulator/Spd regulator base values/SpdP base value A/rpm 18.00SpdI base value A/rpm/s 1149.00REGULATION PARAM/Torque setpoint/T setpoint src/Torque ref 2 src Pre-torque outI-O CONFIG/Analog input/Std analog inps/Analog input 2/An inp 2 *3 An inp 2 thr cnt 10000An inp 2 scale 1.000I-O CONFIG /Digital inputs/Std digital inps/Std dig inp cfg/DI 3 inversion InvertedDI 4 inversion Not invertedI-O CONFIG /Digital inputs/Exp digital inps/Exp dig inp cfg/DI 0X inversion /DI 1X inversion /DI 2X inversion /I-O CONFIG /Digital inputs/Exp digital inps/Exp dig inp en/Exp dig inp en DisableI-O CONFIG /Digital outputs/Std digital outs/Std dig out src/DO 0 src Drive OK DO 1 src BRAKE cont mon DO 2 src RUN cont mon DO 3 src Door open mon I-O CONFIG /Digital outputs/Exp digital outs/Exp dig out src/DO 0X src /DO 1X src /DO 2X src /DO 3X src /I-O CONFIG /Digtal outputs/Exp dig out enExp dig out en Disable ALARM CONFIG/Undervoltage/UV restart OnUV restart time ms 5000 ALARM CONFIG /External fault/EF src Compare 2 output EF activity Disable drive EF restart OffEF hold off ms 2000 ALARM CONFIG /Contact feedback/CNT feedback src DI 3 monitor CNT activity Disable drive CNT hold off ms 1000 ALARM CONFIG /Brake feedback/BRK feedback src An inp 2 < thr BRK activity Disable drive BRK hold off ms 1000 ALARM CONFIG /Overspeed/OS threshold rpm 100 ALARM CONFIG /UV repetitive/UVR attemps 3UVR delay s 15 CUSTOM FUNCTIONS/Compare/Compare 1/Compare 1 src/Cmp 1 inp 0 src Speed ref Cmp 1 inp 1 src Norm SpeedCUSTOM FUNCTIONS/Compare/Compare 1/Compare 1 cfg/Com 1 function I0!=I1CUSTOM FUNCTIONS/Compare/Compare 2/Compare 2 src/Cmp 2 inp 0 src Compare 1 outputCmp 2 inp 1 src DI 0 enable monCmp 2 inp 2 src ONECUSTOM FUNCTIONS/Compare/Compare 2/Compare 2 cfg/Cmp 2 function I0 AND I1 AND I2说明:表内参数在出厂时已设定好,无需再逐一设置。