基于FDC2214设计的手势识别系统

- 75 -
第2期
2019年1月No.2January,2019
现介绍一种利用电容及谐振等原理,基于FDC2214非接触式电容传感器设计的手势识别系统的方法[1],该设计方案简单、动态响应速度快、稳态精度高、抗干扰能力强,将此方法应用在人工智能、无人驾驶、智能家居等某些方面,取得了很好的控制效果。1 设计方案及工作原理1.1 设计方案
采用FDC 传感器的一个通道,每个通道的两个输入端各接一个铜板,相当于电容板的两个极板,两个极板并排放置,通过一个通道的频率值判断手势,具体如图1所示。
图1 总体方案框图
1.2 工作原理
FDC 电容传感器4个通道每个通道接一个LC 谐振回路,且每个通道接两个铜板,相当于电容极板,根据电容定义:
4k S C d
επ=
(1)当介电常数ε或者极板间距离d 变化,电容也变化。手
势变化导致C 变化,LC 的谐振频率变化[2]
,FDC2214电容传
感器将频率转换为数字量,每一个电容值对应一个确定的数字量,具体如图2所示。2 核心部件电路设计2.1 电源电路设计
系统单片机需要3.3 V 电源供电,而FDC2214EV M 板采用2.7~3.6 V 供电,综合测试方便等各种因素,最
终采用220 V 交流电压经过变压器、整流电路、滤波器、
稳压电路产生5 V 供电电压,为防止芯片损坏以及获得较大的电路输出,采用7805系列芯片输出5 V 电压,然后通过AMS1117_3.3稳压芯片产生3.3 V 。
图2 测试原理图
2.2 FDC2214电路设计
FDC2214采用2.7~3.6 V 供电,激励频率为10 kHz ~ 10 MHz ,设计中采用AMS 1117系列产生3.3 V 电压,采用AMS1117系列稳压芯片产生3.3 V 供电电压。用40 M 有源晶振作为输入激励频率,4个通道分别接LC 谐振电路,电路如图3所示。
图3 FDC2214应用电路
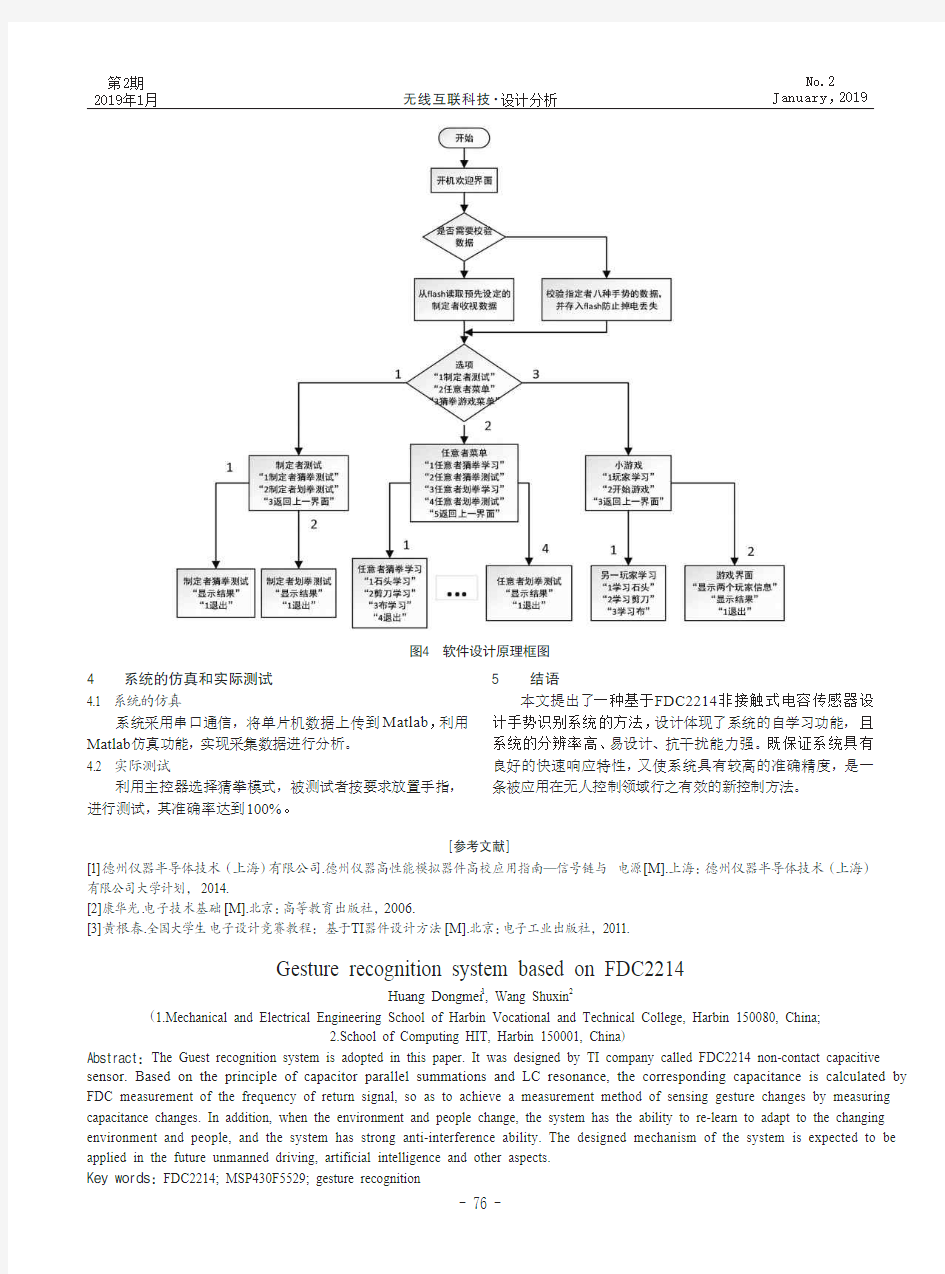
3 系统软件设计
软件设计原理框图如图4所示[3]。
作者简介:黄冬梅(1968— ),女,辽宁岫岩人,教授,硕士;研究方向:嵌入式系统设计,新能源应用技术。
摘 要:文章采用TI 公司FDC2214非接触式电容传感器设计的手势识别系统,系统依据电容并联求和及LC 谐振原理,通过
FDC 测量返回信号的频率计算出相应的电容,从而达到通过测量电容变化进而感知手势变化的一种测量方式。此外,当环境以及人员变化时,该系统具备重新学习以适应变化的环境和人物,且系统抗干扰能力强。该系统的设计机理有望应用在未来无人驾驶、人工智能等方面。关键词:FDC2214;MSP430F5529;手势识别基于FDC2214设计的手势识别系统
黄冬梅1,王树鑫2
(1.哈尔滨职业技术学院 机电工程学院,黑龙江 哈尔滨 150080;2.哈尔滨工业大学 计算机学院,黑龙江 哈尔滨 150001)
无线互联科技
Wireless Internet Technology
非接触式电子设计—手势感应、手势识别芯片IC
非接触式的好处:健康、安全和便利 如果接触式按键和触摸屏工作正常,为什么要替换它们呢?其实,红外线系统不会取代现有的系统,而是增强用户使用体验。增强的集成度和小型化正在改变客户使用电子产品的方式。现如今人们随身携带着智能手机、个人媒体播放器、电子书和平板电脑,“计算机”不再仅仅使用于用户家中或办公桌面。 咖啡馆、餐厅、健身房、巴士站、飞机候车厅,甚至卫生间正在成为新一代嵌入式电子产品的使用环境。在这些不同的操作环境中,用户的手有时会被占用、变脏、出汗或沾有食物 - 所有这些条件不利于触摸屏操作。如果客户是在健身房阅读电子图书,希望在跑步机上一边跑步一边翻页,这将更容易通过非接触式手势识别来翻页,而不是物理接触触摸屏或按下一个小按钮。 阿达电子公司 ADD01S、ADD01T手势识别芯片设有HMI人机对话接口,芯片内部集成最基本的手势识别和照明调光的控制功能,用户无需增加额外的单片机以及复杂的软件工作,是一款完整功能的手势识别解决方案,适用于所有类型的照明应用中,也可广泛应用于开关、探测物体、调光等多种非接触式的手势感应产品中。除此之外,该手势识别解决方案也为用户预留有一定的空间,可根据实际的需求进行一些个性化的设计和优化。 无需看到即可控制设备有很多好处。例如,一个非接触式界面,可以让汽车司机使用非接触式挥手实现安全的启动/结束通话或调整音量,而不需要找到复杂仪表上的调整按钮。并非所有的设备需要带触摸屏的复杂图形显示,非接触式用户界面能够提供新颖和差异化的操作方式。 多-LED感应系统可以基于用户是否接近系统而改变系统操作。机顶盒或HVAC控制面板显示器可以保持关闭,直到系统检测到一定距离内的用户才打开,这能有效降低功耗。电视也可以基于手势输入打开或关闭、公共场所的小型视频广告牌可以基于用户的靠近或远离而改变显示内容,可以使用手势输入与潜在客户交流,这是一种比采用触摸屏更卫生的方法。这种“环境感知”电子产品能够使终端产品更加智能, 同时也更加省电。 融合多-LED接近感应器和主机MCU(例如阿达电子公司的电容式触摸感应微控制器)的设计,打开了灵活使用电容式触摸和红外线非接触式技术实现用户界面的大门。主机触摸感应MCU提供必要的计算能力去解释红外线感应器的输出,帮助调整非接触式手势的时序和灵敏度。MCU还可以用于感应器的实时配置,
手势识别技术综述
手势识别技术综述 作者单位:河北工业大学计算机科学与软件学院 内容摘要: 手势识别是属于计算机科学与语言学的一个将人类手势通过数学算法针对人们所要表达的意思进行分析、判断并整合的交互技术。一般来说,手势识别技术并非针对单纯的手势,还可以对其他肢体动作进行识别,比如头部、胳臂等。
但是这其中手势占大多数。本文通过对手势识别的发展过程、使用工具、目的与市场等进行综述,梳理出手势识别发展的思路,让读者对手势识别有一个总体上的认识,同时也可以让读者在此基础上进行合理想象,对手势识别的未来有一个大体印象。 Abstract: Gesture recognition is an interactive technology using mathematical arithmetic to the analysis,judge and assembly meaning that people want to convey which belongs to computer science and Linguistics.In general, gesture recognition technology is not for simple gestures expressed by hands ,it can also aim to other body movement recognition, such as the head, arm and so on. But the gesture accounted for most of the analysis. In this paper, by describing the development process, tools used , objective and market of gesture recognition , we can sort out the ideas of the development of gesture recognition, and let readers have an overall understanding of gesture recognition. At the same time, it can let the reader imagine that on hand gesture recognition based on reason ,and have a general impression of its future. 1.定义 说到手势识别,首先要对手势识别中的手势有一个清晰的认知。手势在不同的学科中有不同含义,而在交互设计方面,手势与依赖鼠标、键盘等进行操控的区别是显而易见的,那就是手势是人们更乐意接受的、舒适而受交互设备限制小的方式,而且手势可供挖掘的信息远比依赖键盘鼠标的交互模式多。在学术界,人们试图对手势定义一个抽象、明确而简洁的概念以为手势及其应用的研究提供依据。1990年Eric Hulteen和Gord Kurtenbach曾发表的题为“Gestures in Human-Computer Communication”中定义:“手势为身体运动的一部分,它包括一部分信息,而且是一种能被观察到的有意义的运动。挥手道别是一种手势,而敲击键盘不是一种手势,因为手指的运动没有被观察,也不重要,它只表示键盘
基于STM32的手势识别控制器的设计
0 引言 操作控制器作为一种人机交互设备有着广泛的应用,比如在日常生活中,各种家电玩具的遥控器、触摸屏等,在工业生产领域各种仪器仪表设备的操作、设置和校验等。传统的操作控制器主要是通过人机接触的方式进行操作,比如按键,触摸屏等,这种操作方式容易产生静电,对于敏感的精密仪器设备影响较大,产生干扰[1]。有些设备会安置在高温高压或者有辐射的环境中,人机接触会给人体带来伤害,安全性低。市面上有些仪器仪表配有手持操作设备可以通过无线通信的方式进行操作,这种方式成本高,手持操作设备携带不方便。本文基于ARM 处理器芯片和光学数组式传感器设计了一种非接触的手势识别操作器,可将手势动作转化为控制信号,对于目标设备进行操作,安全便捷,可靠性高,具有广泛的应用场景[2]。 1 系统总体设计 本文设计的手势识别操作控制器系统总体分为三大模块,如图1所示,分别是手势检测模块,系统控制模块,和信号传输模块。 手势检测模块的主要任务是实时感应监测范围内的手 势活动,将感应到的手势活动信息转化为电信号并传输给控制系统模块。控制系统模块的功能是根据接收到的手势检测模块的电信号,经过处理识别具体的手势动作并转化为数字信号生成控制信息,通过信号传输模块对于目标设备进行操作[3]。 2 系统硬件设计 2.1 手势检测模块 手势识别传感器模块采用了采用原相科技(Pixart)公司的PAJ7620U2芯片,芯片结构如图2所示,该芯片内部集成了光学数组式传感器,以使复杂的手势和光标模式输出,可以检测出九种手势动作,支持上、下、左、右、前、后、顺时针旋转、逆时针旋转和挥动的手势动作识别,以及支持物体接近检测等功能。芯片结构功能如图所示,该芯片具体积小、灵敏度高、支持中断输出、兼容3.3V/5V 系统、使用方便等特点。 手势检测模块电路设计如图3所示,通过两个3.3V 超低压差稳压芯片,给PAJ7620芯片供电,外部分供电电源使用5V。IIC 通信时钟线IIC_SCL、IIC 通信数据线IIC_SDA 和中断输出引脚配有4.7引上拉电阻用于稳定信号输出。PAJ7620内部自带LED 驱动器,传感器感应阵列、目标信息提取阵列和手势识别阵列。PAJ7620工作时通过内部LED 驱动 器,驱动红外LED 向外发射红外线信号,当传感器阵列在有效的距离中探测到物体时,目标信息提取阵列会对探测目标进行特征原始数据的 获取,获取的数据会存在寄存器中,同时手势识 are operated by recognizing gesture movements. The application shows that the design is easy to operate, small size, high security, and can be widely used in scenarios.Key words : gesture recognition; sensor; STM32; operator 图1 系统结构图
基于3D 体感技术的动态手势识别
第27卷第4期2012年8月 光电技术应用 ELECTRO-OPTIC TECHNOLOGY APPLICATION Vol.27,No.4August ,2012 随着机器智能领域的迅猛发展,手作为人身体上最灵活的一个部位及人机交互的一个媒介,得到越来越多的应用。因此基于手势识别的各种应用也是层出不穷。手势是一种自然而直观的人际交流模式。手势识别也理所当然地成为了实现新一代人机交互不可缺少的一项关键技术。然而,由于手势本身具有的多样性(包括肤色、形态的差异性)、多义性(不同手势具有不同的意义)、以及时间和空间上的差异性(会受到光照等因素的影响)等特点,加之人手是复杂变形体及视觉本身的不适定性,因此基于视觉的手势识别是一个极富挑战性并具有很大应用空间的研究方向[1] 。 1手势识别技术的发展 手势识别分为两种,一种是静态的手势识别,即在 摄像头下检测到某个手势时就给出命令。另一种是动态手势识别,即能够识别手做的一些动作。随着3D 体感技术的出现,手势识别进入一个全新的领域。1.1静态手势识别 静态手势识别的常用方法主要有:基于模版匹配的,用边缘特征像素点作为识别特征,并利用Hausdorff 距离模板匹配完成静态手势识别[2];基于SVM 支持向量机,通过皮肤颜色模型进行手势分割, 并用傅里叶描述子描述轮廓,采用针对小样本特别有效且范化误差有界的最小二乘支持向量机(LS -SVM )作为分类器进行手势识别[3]以及集合模版匹配和机器学习理论的手势识别方法[4]等。但由于静态手势识别技术应用的局限性较大,不够灵活,使用人数在减少。 收稿日期:2012-06-24 作者简介:淦创(1990-),男,辽宁锦州人,大学本科,研究方向为计算机图像处理. ·信号与信息处理· 基于3D 体感技术的动态手势识别 淦 创 (北京航空航天大学,北京100191) 摘要:提出了一种基于3D 体感机Kinect 的图像处理手势识别算法,通过深度图像和骨骼图像的方法实现动态手势识别。首先在Kinect 提供的骨骼图像中20个骨点中,选取2个离手部最近的骨骼点,通过追踪这两个骨骼点的位置来实现对手部的追踪,再通过判断手部的深度(即其相对于摄像头的距离)的变化来实现动态手势识别。 关键词:深度图像;骨骼图像;手部追踪;动态手势识别中图分类号:TN94 文献标识码:A 文章编号:1673-1255(2012)04-0055-04 Dynamic Gesture Recognition Based on 3D Kinect GAN Chuang (Beijing University of aeronautics and astronautics,Beijing 100191,China ) Abstract :A kind of gesture recognition algorithm of image processing based on 3D Kinect is proposed.The dynamic gesture recognition algorithm is performed by skeleton images and depth images.At first,two skeleton points which are nearest to hands are choosen from 20skeleton points in a skeleton image.The process of tracking hands is performed by tracking the positions of the two skeleton points.Then the dynamic gesture recognition pro?cess is realized by the change of depths of hands (the distance between a hand and a camera). Key words :depth image;skeleton image;hands tracking;dynamic gesture recognition
基于手势识别的智能电视交互专利技术综述
基于手势识别的智能电视交互专利技术综述 智能电视具有操作系统,支持第三方应用资源实现功能扩展,支持多网络接入功能,具备人机交互、与其他智能设备进行交互等。随着计算机视觉的发展和人机交互的需要,手势识别研究取得了蓬勃的发展,通过手势识别对智能电视进行控制和操作,能够更轻松、高效地使用电视设备。文章利用专利数据库对智能电视手势识别技术进行了数据统计和分析,对该领域的专利申请趋势等情况做了归纳总结。 标签:智能电视;手势识别;发展状况;专利 Abstract:Intelligent TV has the operating system,which supports the third party application resources to realize the function expansion,supports the multi-network access function,has the man-machine interaction,and carries on the interaction with other intelligent devices. With the development of computer vision and the need of human-computer interaction,the research of gesture recognition has made great progress. By controlling and operating intelligent TV through gesture recognition,one can more easily and more efficiently use TV equipment. This paper makes use of patent database to analyze the data of intelligent TV gesture recognition technology,and summarizes the trend of patent application in this field. Keywords:intelligent TV;gesture recognition;development status;patent 引言 电视是家庭娱乐休闲必不可少的家用电器。如今,电视依然是最为普及的信息传播载体,用户在观看普通节目的同时,还可以上网、娱乐等。从用户的角度出发,通过自然简单、人性化的方式完成交互,无疑是用户完成电视操作的最佳方式。而手势具有直观、自然、丰富的特点,是一种符合人们日常习惯的交互手段,是表達信息和特定意图的良好载体,由于手势具有上述特性,因此在对智能电视进行操控中得到了良好的运用,实现了对智能电视自然灵活地操作。 1 基于手势识别的智能电视控制技术发展状态分析 1.1 技术分解 本文通过检索获得的专利申请进行统计分析,对基于手势识别的智能电视控制所涉及的具体技术和应用领域进行分解。 根据手势采集设备可以将手势识别系统大致分为基于数据手套和基于视觉的两种手势识别系统。其中,数据手套通过多个传感器反馈各关节的数据,并通过位置跟踪器返回人手所在的三维坐标,从而获取手势在三维空间中的位置信息和手指的运动信息。通过数据手套可以直接获取人手在三维空间中的位置和运动
回顾:人机交互中的手势的可视化解释
本科毕业设计(论文) 外文参考文献译文及原文 学院机电工程学院 专业数字媒体技术 年级班别2008级(1)班 学号3109000746 学生姓名李林钢 指导教师冯开平 2013年6 月
目录 译文:回顾:人机交互的手势的可视化解释 (1) 1 引言 (1) 2手势建模 (3) 2.1定义手势 (3) 2.2手势分类 (5) 2.3 手势的暂时性模型 (5) 2.4空间建模手势 (6) 3手势分析 (7) 原文: Visual Interpretation of Hand Gestures for Human-Computer Interaction: A Review(见同名文献) .................................................. 错误!未定义书签。 1 INTRODUCTION .......................................................................... 错误!未定义书签。 2 GESTURE MODELING ................................................................ 错误!未定义书签。 2.1 Definition of Gestures .......................................................... 错误!未定义书签。 2.2 Gestural Taxonomy ............................................................... 错误!未定义书签。 2.3 Temporal Modeling of Gestures ........................................... 错误!未定义书签。 2.4 Spatial Modeling of Gestures ............................................... 错误!未定义书签。 3 GESTURE ANAL YSIS ..................................................................................... 错误!未定义书签。
三种简单手势识别
简单手势识别
一、背景 随着计算机的发展,人机交互技术由传统的鼠标键盘时代发展到了以语音输入、动作识别等技术为代表的自然交互时代n1。特别是视觉计算技术的发展,使计算机获得了初步视觉感知的能力,能“看懂”用户的动作。手势识别作为一种直观自然的输入方式,把人们从传统接触性的输入装置中解放出来,可以以一种更自然的方式与计算机交互,使计算机界面变得更加易‘引。 手势主要分为静态手势和动态手势两种,动态手势可以看作是连续的静态手势序列。动态手势具有丰富和直观的表达能力,与静态手势结合在一起,能创造出更丰富的语义。利用动态手势识别构建新型的交互界面,是新一代的人机交互界面对输入方式自然性的要求,可以弥补传统交互方式的不足。基于视觉和手势识别研究正处于蓬勃发展的阶段,仍存着的许多值得研究的问题。研究基于视觉的动态手势识别对于构建更加好友的人机交互界面很有意义。
二、手势识别概述 2.1、手势识别的概念 手势是姿势的一个子集,姿势这个概念没有精确的定义。一般认为,手势概念经过人的手转化为的手势动作,观察者看到的是手势动作的图像。手势的产生过程如图2-1所示。 图2-1 手势的产生过程 手势识别的过程则找一个从图像V到概念动作G的变换而,如图2-2所示。
2.2、手势识别流程 随着计算机的发展,人机交互技术由传统的鼠标键盘时代发展到了以语音输入、动作识别等技术为代表的自然交互时代n1。特别是视觉计算技术的发展,使计算机获得了初步视觉感知的能力,能“看懂”用户的动作。手势识别作为一种直观自然的输入方式,把人们从传统接触性的输入装置中解放出来,可以以一种更自然的方式与计算机交互,使计算机界面变得更加容易。 手势主要分为静态手势和动态手势两种,动态手势可以看作是连续的静态手势序列。动态手势具有丰富和直观的表达能力,与静态手势结合在一起,能创造出更丰富的语义。利用动态手势识别构建新型的交互界面,是新一代的人机交互界面对输入方式自然性的要求,可以弥补传统交互方式的不足。基于视觉和手势识别研究正处于蓬勃发展的阶段,仍存着的许多值得研究的问题。研究基于视觉的动态手势识别对于构建更加好友的人机交互界面很有意义。
人机交互技术及其应用科普_百度文库
人机交互技术及其应用(科普) 信息技术的高速发展对人类生产、生活带来了广泛而深刻的影响。高科技成果为人们带来便捷、快乐的同时,也促进着人机交互技术的发展。作为信息技术的重要内容,人机交互技术比计算机硬件和软件技术的发展要滞后许多,已成为人类运用信息技术深入探索和认识客观世界的瓶颈。因此,人机交互技术已成为21世纪信息领域亟需解决的重大课题和当前信息产业竞争的一个焦点,世界各国都将人机交互技术作为重点研究的一项关键技术,例如,在美国21世纪信息技术计划中,将软件、人机交互、网络、高性能计算列为基础研究内容,美国国防关键技术计划也把人机交互列为软件技术发展的重要内容之一,在我国的“863”、“973”和自然科学基金等项目中,也将人机自然交互理论与方法作为信息技术中需要解决的关键科学问题。 一、人机交互的概念 人机交互(Human-Computer Interaction,HCI)是关于设计、评价和实现供人们使用的交互式计算机系统,且围绕这些方面主要现象进行研究的科学,狭义的讲,人机交互技术主要是研究人与计算机之间的信息交换,它主要包括人到计算机和计算机到人的信息交换两部分。人们可以借助键盘、鼠标、操纵杆、数据服装、眼动跟踪器、位置跟踪器、数据手套、压力笔等设备,用手、脚、声音、姿势或身体的动作、眼睛甚至脑电波等向计算机传递信息,同时,计算机通过打印机、绘图仪、显示器、头盔式显示器、音箱等输出或显示设备给人提供信息。人机交互与计算机科学、人机工程学、多媒体技术和虚拟现实技术、心理学、认知科学和社会学以及人类学等诸多学科领域有密切的联系,其中,认知心理学与人机工程学是人机交互技术的理论基础,而多媒体技术和虚拟现实技术与人机交互技术相互交叉和渗透。作为是信息技术的一个重要组成部分,人机交互将继续对信息技术的发展产生巨大的影响。 二、人机交互的研究内容 人机交互的研究内容十分广泛,涵盖了建模、设计、评估等理论和方法以及在移动计算、虚拟现实等方面的应用研究与开发,在此列出几个主要的方向:人机交互界面表示模型与设计方法(Model and Methodology) 一个交互界面的好坏,直接影响到软件开发的成败。友好人机交互界面的开发离不开好的交互模型与设计方法。因此,研究人机交互界面的表示模型与设计方法,是人机交互的重要研究内容之一。 可用性分析与评估(Usability and Evaluation) 可用性是人机交互系统的重要内容,它关系到人机交互能否达到用户期待的目标,以及实现这一目标的效率与便捷性。人机交互系统的可用性分析与评估的研究主要涉及到支持可用性的设计原则和可用性的评估方法等。
基于FDC2214的手势识别系统设计与实现
? 159 ? ELECTRONICS WORLD ? 技术交流 系统采用了STM32作为核心控制芯片,使用FDC2214芯片获取电容值,通过滤波后,与样本数据对比,找到最短的k 个样本,判断其类型数量,达到识别手势的目的。 1.总体设计 系统总体设计框架如图1所示,采用了STM32F103ZET6作为核心控制芯片,而核心检测芯片则采用的是TI 公司的FDC2214来处理极板与手之间的容值。得到的数据通过卡尔曼滤波和knn 算法来判断出不同手势之间的区别。 以独立按键来调节菜单和录入手势模板,通过oled 显示屏做出反馈并显示结果。 将手势录入一边,系统会自动处理好数据,再进入判决模式就 可以识别手势。 图1 系统总体设计框架 2.系统硬件设计 2.1 控制部分 本系统的控制核心采用了STM32单片机,它具有72M 主频,64K RAM 和512K ROM ,拥有多达14个定时器,自带PWM ,ADC ,DA,实时时钟等功能。非常满足作为嵌入式系统的控制需求。2.2 检测部分 电容检测部分是整个系统中最为重要的一部分,它决定了系统的识别率高低与否,整个系统的数据采样与检测都是建立在电容检测芯片的准确性上,因此选取TI 公司的FDC2214芯片来做为电容检测芯片,这是一种非接触式电容传感器,还有一个重要特性就是采用了EMI (抗电磁干扰)架构,因此它可以屏蔽高噪声环境干扰,在复杂环境确保传感器数据的准确性(周孟强,刘会衡,基于FDC2214手势识别装置的设计与实现:电子制作,2019)。2.3 极板部分 极板采用的是三层结构,最下面一层使用亚克力板,主要用作 的oled 显示屏,它小巧精致,分辨率高,相比液晶屏幕它更加节能,非常适合作为系统的显示模块。 输入部分由4个独立按键组成。4个独立按键分别作为切换键,确认键,返回键和系统复位键。 2.5 供电部分 电源部分采用了两块锂电池作为电源,使用稳压模块将电压降为5v 并后接入整个系统。 3.系统软件设计 软件系统流程图如图3所示。3.1 数据滤波算法设计数据滤波是去除噪音干扰的有 基于FDC2214的手势识别系统设计与实现 杨凌职业技术学院 陈 阳 图2 极板实物图支撑。中间一层使用铝箔胶带作为极板的金属层。最上面一层采用硬质透明塑料膜,有防止手直接和铝箔接触和保护极板的作用(郭霞,谭亚丽,申淼,基于FDC2214的手势识别系统:传感器与微系统,2018)。这样的设计好处在于可以很方便的自行调整和更换极板上的铝箔来达到不同的检测要求。2.4 人机交互部分 人机交互部分由显示部分和按键输入组成,分别采用oled 显示屏和独立按键组成。 显示部分采用了0.96 英寸 图3 系统软件流程图 效方法,本系统采用卡尔曼滤波算法,这是一种当下使用非常广泛的滤波算法,它有计算量小,易于计算机实现等特点(张辉,卜雯意,施豪,基于FDC2214电容传感器的手势识别装置的设计与实现:巢湖学院学报,2018 )。将极板上采集的数据进行实时的处理,将数据中 图4 系统整机实物图的噪音清除,把误差降到最小。3.2 数据分类算法 kNN (k 最近邻算法)是一种数据分类方法,在学习模式下,将多次手势进行采样并滤波后,获取其特征向量作为样本数据,之后进入判定模式,系统会实时采样当数据稳定后,得到其特征向量,计算其特征向量与样 本数据之间的欧氏距离,找到相 距最短的k 个样本,判断其类型,即可识别手势(张硕,基于KNN 算法的空间手势识别研究与应用:吉林大学,2017)。 表1 石头,剪刀,布手势测试结果 手势实测结果石头石头正确石头石头正确石头石头正确石头石头正确石头石头正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确剪刀剪刀正确布布正确布布正确布布正确布布正确布布 正确 正确率:100%
关于计算机视觉的手势识别综述
关于计算机视觉的手势识别综述 蒋指挥 (江苏科技大学江苏镇江 213022) 摘要:计算机技术的高速发展也产生了许多新领域,在此对以计算机视觉为基础的手势检测识别技术展开综述。主要阐述该技术的发展历程、实现方法、研究现状以及其存在的不足之处和发展方向。结果表明简单的可穿戴设备的手势识别和深度视觉传感器的手势识别和多方法交叉融合的手势识别是未来该领域的发展方向。 关键词:计算机视觉;手势识别;人机交互 A survey of gesture recognition in computer vision//Jiang Zhi Hui Abstract;With the rapid development of computer technology, a lot of new fields have been developed. In this paper, the technology of gesture detection and recognition based on computer vision is reviewed. This paper describes the development of the technology, the realization method, the research status and its shortcomings and development direction. The results show that the simple wearable device for hand gesture recognition and depth vision sensor for hand gesture recognition and multi method cross fusion for gesture recognition is the future direction of the development of the field. Key words:Computer vision; gesture recognition; human-computer interaction 计算机在我们的生活中越来越不可或缺,我们同时也对计算机提出了更高的要求,计算机视觉的手势识别正是对计算机应用拓展的重要途径,例如现在的VR技术,就是应用了手势识别才实现的。ABIResearch公司高级分析师约书亚·弗拉德(JoshuaFlood)指出:“免提操作或手势识别很快将成为高端旗舰智能手机、媒体平板电脑和智能眼镜区别于其他同类产品的一个关键因素。三星电子最新推出银河S4已经将这项技术用于其手机中,并以其全新的用户体验获得用户交口称赞。此外,在一系列新型智能眼镜产品即将发布之时,不难想象这类技术将被采用。”其实手势识别技术涵盖了许多领域,比如物理学、生物学等,实现手势识别的方式有很多种从一开始的二维手型识别、二维手势识别到后来的三维手势识别,正是计算机视觉技术的发展使得手势识别的实现方式更加多样。但目前的技术仍然很繁琐,冗杂的可穿戴设备就直接影响了使用者的舒适感,其还有很大的发展空间。 1、手势识别的发展历程及其实现方法
基于手势识别的人机交互综述
基于手势识别的人机交互综述 摘要:近年来,得益于虚拟现实、人机界面技术、计算机视觉等领域的发展,基于手势识别的人机交互技术得到大力的推动。本文就基于手势识别的人机交互技术展开综述。首先概括手势交互的涉及领域,回顾其发展史和国内外研究现状。接着阐明它的基本界定和分类,并在此基础上分析其热点关键技术。然后实例讨论了几种类型手势交互的典型应用。最后给出了结论。 关键词:虚拟现实;手势交互;计算机视觉;手势识别;特征跟踪 1.引言 人机交互技术通过输入、输出设备,以有效的方式实现交互主体与交互客体的对话。当前的人机交互技术已经从过去交互主体适应交互客体,发展为交互客体不断地适应交互主体的习惯和以交互主体为中心的新阶段[1,2,3,4]。以用户为中心的,新型、自然的人机交互技术逐渐成为开发者和科研工作者的关注重点。这类交互方式要求输入与输出能够最大限度地符合交互主体的行为习惯,并能够在交互主体的脑中顺利构建交互环路。由于手势具有极强的信息表述功能,加之人手操作行为本身就是人与世界相互作用的主要方式,因此,基于手识别的人机交互技术相关研究有着重要的理论价值和应用价值。基于手势识别的人机交互技术涉及计算机科学、认知心理学、行为学等诸多方面的知识。本文不能面面俱到,仅就手势交互的基本问题:手势语义的分类,以及当前发展概况、研究热点技术和典型系统应用等相关问题进行综述。 2.研究现状 目前,基于视觉的手势交互已被广泛的研究,由于手势本身的多义性及时空差异性,加之手形变的高维度及视觉问题本身的不适定性,基于视觉的手势识别一直是一项极富挑战性的究课题[5]。需要解决的核心问题是对手形的识别,对手势的跟踪等。传统的方法主要分为两大类:(1)基于模型(model-base)的方法;(2)基于表征(appearance-based)的方法[6]。这些方法及其衍生算法极大程度地依赖于计算机科学中虚拟现实、机器视觉、模式识别、人机交互等多个领域的交流与合作。相关的国际会议:CHI、ICCV、CVPR、ICAT、IEEE VR 为研究者提供了一个能充分交流的空间,并吸引了越来越多的研究人员共同参与合作。此外,学科之间的交流也吸引了心理学研究人员的共同参与。他们以从用户为中心出发,为基于手势交互研究和开发提出了宝贵意见[7]。纵观手势交互的发展历程,其研究重点也从早期简单的系统框架、低层特征提取[8]、手形模板匹配[8]等问题转变到关节式物体跟踪[9,10, 11]、跟踪性能评价[12]、操作型手势解析[14]等问题上。我国在基于手势识别的人机交互领域的研究近年来得到了长足的发展。研究机构集中在国内的研究所和高校的科研单位。目前国内手势交互的研究成果主要有:中国科学院软件研究所[15]的研究中,对二阶自回归过程动力学模型(Auto-Regressive Process, ARP)进行训练和学习,进而建立基于ARP 的预测模型,实现了人手运动的鲁棒性跟踪,在出现跟踪丢失的情况下在后续序列中可以自动恢复正确跟踪。中国科学院自动化研究所模式识别实验室提出一种基于区域的多连接体(手指)的三维运动跟踪算法[13],用多约束融合的方法以及手指的运动特性,建立多刚体的三维运动描述,通过三类基本约束条件,把跟踪问题归结为一个约束误差优化问题。清华大学的崔锦实博士,提出一种基于回归-优化方法的关节式物体的姿态估计方法[16]。该方法把回归分析与全局优化搜索相结合,保证了估计的精度和连续性;针对现有滤波器在高维非线性多峰
表情识别技术综述
表情识别技术综述 摘要:表情识别作为一种人机交互的方式,成为研究的热点。基于对表情识别的基本分析,文章重点介绍了面部表情识别的国内外研究情况和面部表情特征的提取方法。 关键词:表情识别;特征提取;表情分类。 前言:进入21世纪,随着计算机技术和人工智能技术及其相关学科的迅猛发展,整个社会的自动化程度不断提高,人们对类似于人和人交流方式的人机交互的需求日益强烈。计算机和机器人如果能够像人类那样具有理解和表达情感的能力,将从根本上改变人与计算机之间的关系,使计算机能够更好地为人类服务。表情识别是情感理解的基础,是计算机理解人们情感的前提,也是人们探索和理解智能的有效途径。如果实现计算机对人脸表情的理解与识别将从根本上改变人与计算机的关系,这将对未来人机交互领域产生重大的意义。 正文:一、面部表情识别的国内外研究情况 面部表情识别技术是近几十年来才逐渐发展起来的,由于面部表情的多样性和复杂性,并且涉及生理学及心理学,表情识别具有较大的难度,因此,与其它生物识别技术如指纹识别、虹膜识别、人脸识别等相比,发展相对较慢,应用还不广泛。但是表情识别对于人机交互却有重要的价值,因此国内外很多研究机构及学者致力于这方面的研究,并己经取得了一定的成果。 进入90年代,对面部表情识别的研究变得非常活跃,吸引了大量的研究人员和基金支持。美国、日本、英国、德国、荷兰、法国等经济发达国家和印度、新加坡都有专门的研究组进行这方面的研究。其中MIT的多媒体实验室的感知计算组、CMu、Ma州大学的计算机视觉实验室、Standford大学、日本城蹊大学、大阪大学、ArR研究所的贡献尤为突出。 国内的清华大学、哈尔滨工业大学、中科院、中国科技大学、南京理工大学、北方交通大学等都有专业人员从事人脸表情识别的研究,并取得了一定的成绩。在1999年的国家自然科学基金中的“和谐人机环境中情感计算理论研究”被列为了重点项目。同时中国科学院自动化所、心理所以及国内众多高校也在这方面取得了一定的进展。2003年,在北京举行了第一届中国情感计算与智能交互学术会议,会议期间集中展示了国内各研究机构近几年来从认知、心理、模式识别、系统集成等多种角度在情感计算领域取得的研究成果,一定程度上弥补了我国这方面的空白。国家“863”计划、“973”项目、国家自然科学基金等也都对人脸表情识别技术的研究提供了项目资助。 二、面部表情特征的提取方法 表情特征提取是表情识别系统中最重要的部分,有效的表情特征提取工作将使识别的性能大大提高,当前的研究工作也大部分是针对表情特征的提取。 目前为止的人脸面部表情特征提取方法大都是从人脸识别的特征提取方法别演变而来,所用到的识别特征主要有:灰度特征、运动特征和频率特征三种阎。灰度特征是从表情图像的灰度值上来处理,利用不同表情有不同灰度值来得到识别的依据。运动特征利用了不同表情情况下人脸的主要表情点的运动信息来进行识别。频域特征主要是利用了表情图像在不同的频率分解下的差别,速度快是其显著特点。在具体的表情识别方法上,分类方向主要有三个:整体识别法和局部识别法、形变提取法和运动提取法、几何特征法和容貌特征法。 整体识别法中,无论是从脸部的变形出发还是从脸部的运动出发,都是将表情人脸作为一个整体来分析,找出各种表情下的图像差别。其中典型的方法有:基于特征脸的主成分分析(prineipalComponentAnalysis,pCA)法、独立分量分析法(Indendent ComPonent Analysis,ICA)、Fisher线性判别法(Fisher’s Linear Discriminants,FLD)、局部特征分析(LoealFeatureAnalysis,LFA)、Fishe诞动法(Fisher^ctions)、隐马尔科夫模型法(HideMarkovModel,HMM)和聚类分析法。
基于FDC2214设计的手势识别系统
- 75 - 第2期 2019年1月No.2January,2019 现介绍一种利用电容及谐振等原理,基于FDC2214非接触式电容传感器设计的手势识别系统的方法[1],该设计方案简单、动态响应速度快、稳态精度高、抗干扰能力强,将此方法应用在人工智能、无人驾驶、智能家居等某些方面,取得了很好的控制效果。1 设计方案及工作原理1.1 设计方案 采用FDC 传感器的一个通道,每个通道的两个输入端各接一个铜板,相当于电容板的两个极板,两个极板并排放置,通过一个通道的频率值判断手势,具体如图1所示。 图1 总体方案框图 1.2 工作原理 FDC 电容传感器4个通道每个通道接一个LC 谐振回路,且每个通道接两个铜板,相当于电容极板,根据电容定义: 4k S C d επ= (1)当介电常数ε或者极板间距离d 变化,电容也变化。手 势变化导致C 变化,LC 的谐振频率变化[2] ,FDC2214电容传 感器将频率转换为数字量,每一个电容值对应一个确定的数字量,具体如图2所示。2 核心部件电路设计2.1 电源电路设计 系统单片机需要3.3 V 电源供电,而FDC2214EV M 板采用2.7~3.6 V 供电,综合测试方便等各种因素,最 终采用220 V 交流电压经过变压器、整流电路、滤波器、 稳压电路产生5 V 供电电压,为防止芯片损坏以及获得较大的电路输出,采用7805系列芯片输出5 V 电压,然后通过AMS1117_3.3稳压芯片产生3.3 V 。 图2 测试原理图 2.2 FDC2214电路设计 FDC2214采用2.7~3.6 V 供电,激励频率为10 kHz ~ 10 MHz ,设计中采用AMS 1117系列产生3.3 V 电压,采用AMS1117系列稳压芯片产生3.3 V 供电电压。用40 M 有源晶振作为输入激励频率,4个通道分别接LC 谐振电路,电路如图3所示。 图3 FDC2214应用电路 3 系统软件设计 软件设计原理框图如图4所示[3]。 作者简介:黄冬梅(1968— ),女,辽宁岫岩人,教授,硕士;研究方向:嵌入式系统设计,新能源应用技术。 摘 要:文章采用TI 公司FDC2214非接触式电容传感器设计的手势识别系统,系统依据电容并联求和及LC 谐振原理,通过 FDC 测量返回信号的频率计算出相应的电容,从而达到通过测量电容变化进而感知手势变化的一种测量方式。此外,当环境以及人员变化时,该系统具备重新学习以适应变化的环境和人物,且系统抗干扰能力强。该系统的设计机理有望应用在未来无人驾驶、人工智能等方面。关键词:FDC2214;MSP430F5529;手势识别基于FDC2214设计的手势识别系统 黄冬梅1,王树鑫2 (1.哈尔滨职业技术学院 机电工程学院,黑龙江 哈尔滨 150080;2.哈尔滨工业大学 计算机学院,黑龙江 哈尔滨 150001) 无线互联科技 Wireless Internet Technology
手势识别综述
手势识别综述 【摘要】介绍了手势识别的定义、分类,手势识别的过程,动态手势识别的过程。 【关键词】手势建模;傅里叶描述子;动态手势 1手势定义和分类 通常在人机交互领域手势定义为:人类通过手掌和手指的不同姿势组合形成的具有特定含义的信息的集合体称为手势。 手势通常可以分为操作性手势和交流性手势:如钢琴伴奏家在弹奏钢琴时的手指动作属于操作性手势,通过十个手指的不同组合,在键盘上发出不同声音形成乐曲的弹奏,只有操作的含义,不含有视觉上信息。马路上交警指挥路况时手上的动作属于交流性手势,通过司机观察交通警察手上不同动作理解警察的意思,含有视觉上的信息。 按照手势在表达的信息中所处的地位分为自主性手势和非自主性手势:哑语演示时表演者手上的手势动作完全表达了哑语表演者的思想,手势在语义交流中占主导地位,属于自主性手势,演员表演节目时有时为了更好的表达情感会用手势加深语义表达,但是手势只是为了更好表达意思,起到对演员表达思想的补充,这种手势动作这属于非自主性手势,在语义表达中不占主导地位。按照手势在交流活动中手势的作用对象分为离心手势和向心手势:比如说话人在下命令时手指向受命人这种手势属于离心手势,例如交通警察在交通管制中的手势属于离心手势,当听到某消息时听者会有相应的情感反应这时的手势属于向心手势,例如小朋友表示不同意时摇手即为向心手势。当操作者利用手势表达思想的时候有两种方式,一种是手臂不动完全通过手指和手掌的运动来表达操作者的意思,还有一种是忽略手指的运动,通过手的运动轨迹来表达思想。当我们做研究时会遇到手和手指同时运动的情况这时为了分类方便,需要做相应约束,当手是动的应忽略手指的动作,反之如果手指在动这时应忽略手的运动轨迹。因为基于表观的手势识别最终面临的是手的2D图像如果手和手指的运动同时考虑的话会给分类造成不必要的麻烦。 2手势识别的分类 按照对手势数据采集的方式分为数据手套型和摄像头型。 2.1数据手套 虚拟现实中重要组成部分,是一种通用的人机接口他可以将手指的复杂动作通过传感器反应到虚拟环境中去,在虚拟环境中真实再现手部动作。数据手套使用的效果关键是手套能不能将手指、手掌、手腕的弯曲真实的以数据形势反演到系统数据库中,让系统根据模型对手势进行有效识别,由于手部软组织和计算复杂性,数据手套的计算速度总是存在延时,同时从人机交互的角度手套佩戴也十分不方便,如果多人使用还存在卫生等问题,因此数据手套目前来说只是应用在试验阶段,真正推广到社会应用还有很多问题要解决。例如由海军某课题组开发的某型飞机训练仿真系统采用了数据手套,将人的动作如拉升飞机操纵杆通过数据手套反应到系统中,但是不足之处是手套存在一定的延时,通常第二个动作都准备做了,第一个动作系统往往还没执行,这和真实的飞机操作存在很大的差别,但是要想系统及时接受数据手套传感来的数据,往往对系统的中央处理器要求很高,需要大量投入经费和人力,存在一定的矛盾。因此数据手套在虚拟仿真中往