基于PLC的两轴进给控制系统设计
PLC钻床主轴进给控制系统程序设计

PLC钻床主轴进给控制系统程序设计介绍:PLC钻床主轴进给控制系统是一种由程序控制的自动化设备,用于控制钻床的主轴运动和进给动作。
通过PLC编程实现了对钻床主轴的启停控制、前进和后退控制、速度调节等功能。
本文将介绍PLC钻床主轴进给控制系统的程序设计。
程序设计步骤:1.确定功能需求:根据钻床主轴的控制要求,确定需要实现的功能模块,如启停控制、方向控制、速度调节等。
2.确定I/O配置:根据钻床主轴的硬件接口,确定所需的输入输出信号,如启动信号、停止信号、方向信号、速度信号等。
然后将这些信号连接到PLC的输入输出模块。
3.确定运动控制算法:根据钻床主轴的运动特性,确定相应的运动控制算法,如PID控制算法、速度闭环控制算法等。
4.编写PLC程序:根据功能需求和运动控制算法,使用PLC编程软件编写相应的控制程序。
程序包括输入输出模块的配置、运动控制算法的实现以及信号的判断和处理逻辑。
示例程序:以下是一个简单的PLC钻床主轴进给控制系统的程序设计示例。
主程序:1.初始化程序,包括I/O模块的初始化和变量的初始化。
2.读取输入信号,包括启动信号、停止信号、方向信号和速度信号。
3.判断启动信号和停止信号的状态,根据状态进行相应的处理。
如果启动信号为ON且停止信号为OFF,则进行下一步。
4.根据方向信号设置主轴的运动方向,如果方向信号为正,则设置主轴向前运动;如果方向信号为负,则设置主轴向后运动。
5.根据速度信号设置主轴的运动速度。
6.控制主轴的启停,如果启动信号为ON,则启动主轴;如果停止信号为ON,则停止主轴。
7.主程序循环运行,不断读取输入信号并进行处理。
总结:PLC钻床主轴进给控制系统的程序设计是一个复杂而关键的任务,需要充分了解钻床主轴的运动特性和控制要求。
通过合理的功能需求分析和运动控制算法设计,再结合PLC编程软件的使用,可以编写出稳定可靠的PLC钻床主轴进给控制系统程序。
基于PLC的步进电动机单双轴运动控制的实现
00005
00006
图 2 控制时序图
00005 00006
00006 00005
DIFU 20000
@MDV #1000 DM0000
@MDV #0000 D 所示,梯形图中设定参数有:
和 01003 作方向控制,如图 6 所示。
180
文章编号:1001-3997(2009)03-0180-03
机械设计与制造 Machinery Design & Manufacture
一种新型空间轴定比传动的研究
第3期 2009 年 3 月
张克敏 梁锡昌 (重庆大学 机械传动国家重点实验室,重庆 400044)
00005 按下时正向运行
设置低位脉冲数 1000 个脉冲
设置高位脉冲 脉冲从 0100 端子输出。 作为 CW 脉冲
00006 按下时反向运行
@MDV #1000 DM0000
设置低位脉冲 1000 个脉冲
00006 AR1115 2001
@MDV #800 DM0001
PULS(65) 000 000
DM0010 值为 0001,对应加减速率为 10HZ/10ms
时,为相对坐标系;设置为 1 时,为绝对坐标系。
DM0011 值为 0050,对应目标频率为 500HZ
3.1.1 对于不带加减速的单相脉冲输出
DM0012 值为 0020,对应启动频率为 200HZ
当 PLC 控制坐标系设定为相对坐标系时,可以从端口 0 和
(2)由步进电机与驱动器电路组成的开环数字控制系统,既 非常简单、廉价,又非常可靠。同时,它也可以与角度反馈环节组 成高性能的闭环数字控制系统。
基于PLC的两轴进给控制系统设计3 最终修改稿
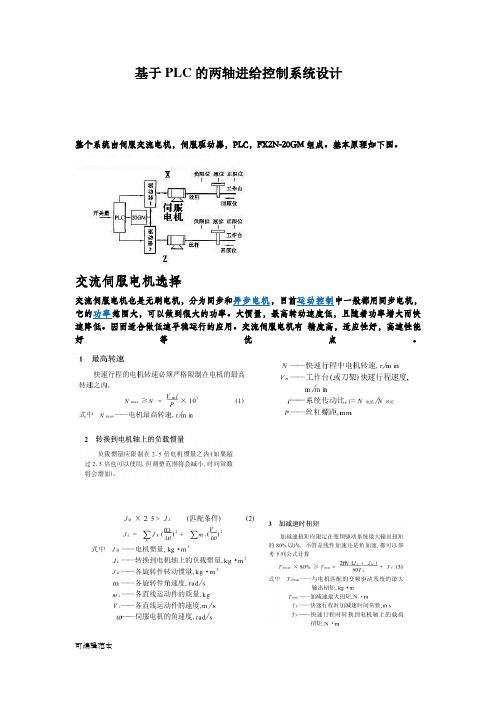
基于PLC的两轴进给控制系统设计整个系统由伺服交流电机,伺服驱动器,PLC,FX2N-20GM组成。
基本原理如下图。
交流伺服电机选择交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。
大惯量,最高转动速度低,且随着功率增大而快精度高,适应性好,高速性能好等优点。
查资料获得的数控铣床参数表上图。
转速计算N=4*2/8*10*10*10*1=1000r/min经上面计算校核,我们决定选用三菱HC-SFS 301交流伺服电动机,其规格如下功率:3kw转速: 1000r/min工作状态扭矩:28.6N*m电机惯量:100kg*cm2负载惯量::111kg*cm2 时间特性250ms由上计算有数据与电动机校核1000r/min<=1000r/min;7.76N*m<28.6N*m;20.35kg*cm2<100kg*cm2; 100ms<250ms ;满足要求. PLC选型PLC选型的关键主要是能满足基本控制功能和容量,并考虑维护的方便性、备件的通用性、系统可扩展性以及能满足特殊功能要求等。
这里采用三菱FX2N--48MT,它是FX系列中先进的微型PLC,具有高速、高性能的特性,一条基本指令运算时间为0.08uS,一条应用指令运算时间约为1.52~100“s,输入点和输出点均为24点,满足输入输出。
要求,有一定余量便于拓展,备用。
输出点采用晶体管输出以获得快速性。
伺服驱动器选型电动机为三菱HC-SFS 301,根据上图官方资料伺服驱动器选型为:MR-JS2-350A如下为MR-JS2-350A可驱动电机表三菱HC-SFS 301在列,如下为伺服电机驱动器端子功能表MR-JS2-350A运行控制分为位置控制模式和内部速度控制模式。
位置控制模式:由外部输入脉冲信号及正反转信号。
内部速度控制模式:.由外部输入正反转信号,转速为伺服驱动器内部设定。
基于PLC的台式钻床控制系统改造及其进给系统设计
基于PLC的台式钻床控制系统改造及其进给系统设计学校代码:10904学士学位论文基于PLC的台式钻床控制系统改造及其进给系统设计姓名:201115310333 学号:、指导教师:机电工程学院院系(部所):机械设计制造及其自动化专业:2013年5月31日完成日期:基于PLC的台式钻床控制系统改造及其进给系统设计姓名:201115310333 学号:、指导教师:机电工程学院院系(部所):机械设计制造及其自动化专业:2013年5月31日完成日期:摘要本文介绍的是对台式钻床的改造与设计,通过导入液压进给系统和PLC控制系统将其改造成为自动钻床。
设计的过程首先是按照机床的一般设计步骤进行,然后再对进给系统和控制系统进行具体设计。
设计的重点在于进给系统的设计和PLC控制系统的设计。
液压系统的设计主要是根据已知的条件,来确定液压工作方案、液压泵、液压缸结构、控制油路的设计。
PLC控制系统设计主要是电气控制系统硬件和软件的设计,其中包括PLC机型的选择、I/O端口的分配、I/O硬件接线图的绘制、PLC梯形图程序的设计。
最后,利用PLC可编程控制器对液压回路等进行控制。
关键词:自动钻床;液压进给系统;PLCAbstractThe bench drill is the metal cutting tools in mechanical machining, this paper is transformation and design of the desktop machine, mainly through the introduction of hydraulic system and PLC control system will be transformed into the automatic drilling machine.The design process is first carried out in accordance with the general machine design steps, and then the feed system and control system were designed in details. The design focuses on the design of feed system design and PLC control system. The design of hydraulic system is based on the known conditions, to determine the design of hydraulic project, hydraulic pump, hydraulic cylinder structure, control circuit. The design of PLC control system is mainly the design of electrical control system of hardware and software, including the choice of PLC models, the I\/O port assignment, I\/O hardware wiring diagram, ladder diagram of PLC program design. Finally, the programmable controller of the hydraulic circuit is controlled by PLC Key words: Automatic drilling machine;Hydraulic feed system ; PLC目录第1章绪论 ..................................................................... ........................................ 1 1.1研究的目的意义...................................................................... ...................... 1 1.2问题的提出、分析以及解决方案 (1)第2章自动钻床的总体设计方案 ..................................................................... ..... 3 2.1 自动钻床的改造方案的确定.......................................................................3 2.2 执行系统的方案设计 ..................................................................... ............... 3 2.2.1 执行系统的功能原理设计 ......................................................................4 2.2.2 执行系统的运动规律 ..................................................................... ......... 4 2.2.3执行系统的协调设计原则 ..................................................................... .. 5 2.2.4执行系统的方案评价 ..................................................................... .......... 5 2.3传动系统方案设计和原动机选择 ............................................................... 5 2.4传动系统方案设计...................................................................... ................. 5 2.5 控制方案设计 ..................................................................... ......................... 6 2.6本章小结 ..................................................................... (7)第3章钻床进给系统的设计 ..................................................................... ............. 8 3.1 进给系统概述与分析 ..................................................................... ............. 8 3.2 进给系统方案图的确定 ..................................................................... ......... 9 3.3 工况分析 ..................................................................... ................................ 9 3.4 切削力的计算 ..................................................................... ........................10 3.4.1 切削刀具及相关参数的选择 (10)3.4.2 主轴转速及钻孔时间的计算 (10)3.4.3 切削力的计算 ..................................................................... ...................11 3.5 钻床主轴设计 .............................................................................................12 3.5.1 主轴材料的选择...................................................................... ...............12 3.5.2 轴的结构设计 ..................................................................... ...................12 3.5.3 轴强度的校核 ..................................................................... .. (13)I3.6 进给液压系统设计 ..................................................................... . (14)3.6.1 负载分析 ..................................................................... (14)3.6.2 液压缸执行元件主要参数的确定 (16)3.7 本章小结 ..................................................................... ...............................22 第4章自动钻床控制系统设计 ..................................................................... .. (23)4.1 自动钻床的自动化控制要求......................................................................234.2 可编程控制器PLC的简述 ..................................................................... . (23)4.3 自动钻床主轴进给系统控制流程 (24)4.4钻床进给系统电气原理图 ..................................................................... .. (26)4.5 PLC控制系统程序设计如下图 (28)4.6本章小结 ..................................................................... ................................29 第5章设计总结 ..................................................................... ...............................29 参考文献 ..................................................................... ............................................30 致谢 ..................................................................... . (31)II基于PLC的台式钻床控制系统改造及其进给系统设计第1章绪论1.1研究的目的意义当今社会,在现实生产中,存在自动化程度不高,难以进行大批量的生产;工作效率低,且工人的工作环境恶劣;占用人力较多,操作固定不变易出错;精度不高,工件装夹费时,加工产品质量不高问题,因此,我们要在实现钻床加工的自动化、减少生产力的投入生产和与其它工艺流程相结合等问题上来解决这些问题,同时也要考虑经济问题。
二轴PLC驱动步进电机的工作平台设计
2017年第9期时代农机TIMES AGRICULTURAL MACHINERY第44卷第9期Vol.44No.92017年9月Sept.2017作者简介:魏永吉(1985-),男,吉林松原人,大学本科,主要研究方向:设备自动化控制技术。
二轴PLC 驱动步进电机的工作平台设计魏永吉1,张晏嘉2,郝鹏3,吴志东3,何义波3,曾涛3,李中盟3,高威明3,李镇洵3,周成宇3(1.安徽三安光电有限公司,安徽芜湖241000;2.齐齐哈尔技师学院,黑龙江齐齐哈尔161000;3.齐齐哈尔大学,黑龙江齐齐哈尔161000)摘要:本次设计主要是设计一套T 型的数控工作台的进给系统,以三菱FX2N 系列PLC 作为控制核心,结合组态王上位机、步进电机驱动器等控制元件,设计基于PLC 的步进电动机位置控制系统。
开发的这套系统可以作为一套实验室设备,可以用作教学还可以作为研究模型,强化现有的机床,这套设备可以很直观的展现大型设备的三维形状,教学或者研究起来多很方便,并且占地面积小,危险性低。
关键词:数字信号控制工作台;步进电动机;PLC 应用;系统模拟仿真本次设计的主要内容是研究设计一套数控工作台T 型横梁系统,可以实现数字化控制的工作台在X 轴与Y 轴这两个轴向进行运动。
笔者通过本次设计的系统,去研究和分析复杂的动态对象,这样一来可以用工作平台来代替大型的机械装备系统,从而减少对大型机械装备的损坏。
并且在设计和制造的装备过程中,大大减少了宝贵的时间,一方面使用方便便捷,另一方面缩小资金浪费。
通过设计开发这样一套数控工作台T 型横梁系统,可以使其作为一套完整的实验室设备,提供给学生或是教学人员进行参考。
无论是在教学方面,还是在科研方面都有着很重要的作用。
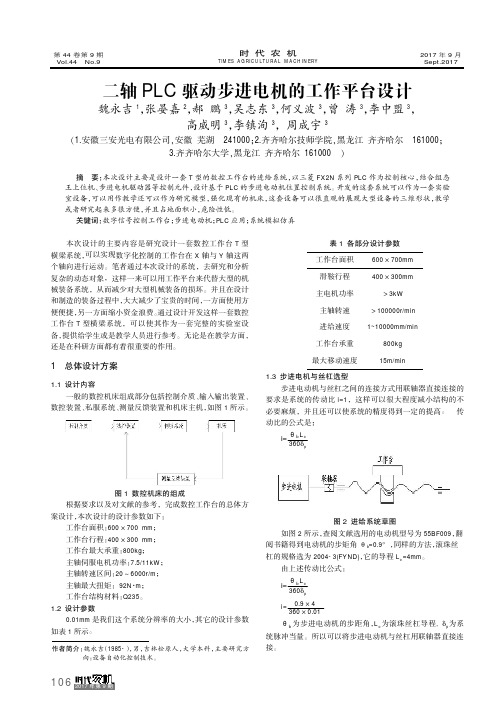
1总体设计方案1.1设计内容一般的数控机床组成部分包括控制介质、输入输出装置、数控装置、私服系统、测量反馈装置和机床主机,如图1所示。
图1数控机床的组成根据要求以及对文献的参考,完成数控工作台的总体方案设计,本次设计的设计参数如下:工作台面积:600×700mm ;工作台行程:400×300mm ;工作台最大承重:800kg ;主轴伺服电机功率:7.5/11kW ;主轴转速区间:20~6000r/m ;主轴最大扭矩:92N ·m ;工作台结构材料:Q235。
基于PLC的数控机床控制系统设计
基于PLC的数控机床控制系统设计数控机床是现代制造业中的核心设备之一,其在工业生产中的自动化程度非常高,能够实现高效、高精度的加工。
而PLC(可编程逻辑控制器)作为一种广泛应用于工控领域的专用计算机,其稳定性和可靠性非常高,适用于数控机床控制系统的设计。
硬件设计方面,首先需要选定适用于数控机床控制的PLC,一般推荐选择功能强大、性能稳定的工业级PLC。
其次,需要根据实际应用需求选择适配的输入输出模块,用于与机床的各个传感器和执行器进行连接。
然后,根据数控机床的运动结构,选择合适的电机驱动器和编码器等设备。
最后,需要设计数控机床的操作面板,用于人机交互,包括显示屏、按钮、旋钮等。
软件设计方面,PLC的控制程序需要通过编程语言进行编写,常用的编程语言包括梯形图、指令表、结构化文本等。
在编程中,首先需要实现数控机床的各种基本功能,例如:自动进给、自动下刀、自动换刀等。
然后,针对具体的加工要求,编写相应的加工程序,包括工件的坐标系设定、刀具半径补偿、切削速度设定等。
此外,还需要编写相应的报警和故障处理程序,以保证数控机床的安全运行。
设计完整的基于PLC的数控机床控制系统后,还需要进行相应的调试和测试。
通过连接各个部件,验证控制逻辑是否按预期工作,检查机床运动是否平稳、精确。
在测试过程中,还需要模拟各种异常情况,如断电、通信异常等,确保系统能够正确处理这些异常情况,保证机床的安全性和可靠性。
总之,基于PLC的数控机床控制系统设计需要考虑到硬件和软件两个方面,确保系统功能完善、稳定可靠。
通过合理的硬件设计和编写高效的控制程序,可以实现数控机床的自动化加工,提高生产效率和产品质量。
基于PLC的数控车床电气控制系统设计
数控系统只对主轴系统进行开关控制。数控装置通过PLC对主轴系统进行起停控制。
1.2 PLC的硬件与工作原理
1.2.1 PLC简介
可编程序控制器(Programmable Controller)简称PC,为了不与个人计算机(也简称PC)混淆,通常将可编程序控制器称为PLC。它是在电器控制技术和计算机技术的基础上开发出来的,并逐渐发展成为以微处理器为核心,把自动化技术、计算机技术、通信技术融为一体的新型工业控制装置。
图2.1 PLC 车床控制系统分解图
2.4 利用PLC代替继电器--接触器控制方式的优越性
1.可维护性好采用PLC进行控制后,由于采用了专用芯片及集成电路,提高了集成度,减少了元器件数量,机床控制电路的接线量大为减少,故障率大大降低。可维护性好,基本上无需维护。
2.可靠性高PLC的平均无故障工作时间高达300000h(约34.2年),所以其可靠性高。而采用继电器--接触器控制机床的控制则因为存在大量机械触点,工作电压和工作电流较大,可靠性较差。
本文主要完成了主轴控制、坐标轴控制、自动换刀控制、定时润滑控制以及报警处理等功能的PLC控制程序的开发。并且利用FXGP_WIN-C软件编写了该机床的PLC控制程序,并借助其运行、监控功能,通过相关设备,观察了程序的运行情况。
关键词:PLC控制,数控车床,梯形图
第一章 概 述
CK9930型数控车床配备的是华中I型数控系统,是一种比较老式的小型简易经济型数控系统。随着数控技术的不断进步与发展,这一数控系统已不能满足加工要求,本课题就是对现有的CK9930数控车床所进行的改造项目的一个组成部分。主要是车床电气控制部分进行改造。
1.PLC输入输出端与机床面板信号联接
CNC数控机床操作面板上有按钮、旋钮开关和指示灯等,按钮、旋钮开关直接与可编程控制器的输入端接线柱相连,指示灯直接与PLC输出端接线柱相连。
基于PLC双轴位置控制
基于PLC双轴位置控制—学年第学期课题名称双轴位置控制实训姓名学号班级成绩基于PLC双轴控制实训[摘要] 双轴位置控制主要利用PLC来实现对整个系统的控制,利用设备控制面板上模式旋钮来选择手动或自动的运行方式,可以在二维平面内完成一定的设计,在数控系统等领域应用极为广泛关键词:双轴控制 PLC 位置控制Abstract: Biaxial position control is mainly the use of PLC to realize the control of the whole system, the use of equipment on the control panel model knob to select manual or automatic operation mode, can be done in 2 d plane design, is widely applied in the field of numerical control system, etcKey words: Biaxial control PLC position control1.课题要求(1).总体控制要求:能够通过PLC控制X轴,Y轴两电机完成一系列的自动控制动作,可以使系统自动完成一几何图形的绘制。
(2).程序运行后,可以选择对电机的自动控制及手动控制(3).自动控制可以完成一系列动作2.硬件介绍与原理图本实验设备由机械运动、电气控制回路、气动控制回路与铝型材板四部分组成,将机械、电气及气动有机组合在一起,实现点位控制的系统。
图1为双轴位置控制实训装置。
其中,X,Y轴电机为两步进电机,由PLC输出脉冲信号给步进驱动器,驱动电机在X轴和Y轴运动。
主要部件与功能如下:总电源开关:控制设备电源通断。
(在照片上被开关电源遮住,之后会有详细图解。
)开关电源:将交流220V转换为直流24V,供中间继电器、电磁阀等弱电电路使用。
1200plc两轴伺服画圆等运动控制案例
1200plc两轴伺服画圆等运动控制案例1200PLC两轴伺服画圆等运动控制案例引言:自从工业自动化技术的应用,伺服系统开始成为各种机械设备中不可或缺的一环。
具备高精度和高速性能的伺服系统在现代工业中被广泛运用,能够实现各种复杂的运动控制要求。
本文将介绍一个基于1200PLC的两轴伺服画圆等运动控制案例,详细阐述其实现原理和应用场景。
第一节:概述伺服系统是自动化控制系统的一个关键部分,通过对电动机的控制,实现对机械设备的准确定位和运动控制。
而本案例中所使用的1200PLC 是一种基于PLC技术的控制器,能够满足多轴控制、精密定位和实时反馈等要求。
该案例主要利用1200PLC通过对两个伺服电机的控制,实现了画圆等复杂运动控制。
第二节:实现原理该案例中的两轴伺服画圆等运动控制,是通过对伺服电机的位置控制来达到目的。
首先,通过PLC与伺服控制器进行通讯,控制伺服电机的运动。
然后,利用系统中的编码器检测反馈信号,将位置反馈给PLC。
最后,通过PLC的控制算法,实时调整电机的输出信号,从而控制电机的位置和速度。
第三节:应用场景该案例的应用场景广泛,可以用于各种需要高精度和高速运动控制的机械设备。
比如在激光切割机中,需要对激光光束进行精准定位和运动控制,通过该案例中的伺服系统可以实现对切割位置和速度的控制。
又比如在机械加工中心中,需要对刀具进行精确定位和运动控制,通过该案例中的伺服系统可以实现对加工路径的控制。
结论:通过本案例的介绍,我们可以看到1200PLC两轴伺服画圆等运动控制的实现原理和应用场景。
伺服系统在现代工业中的应用越来越广泛,通过对电动机的控制,能够实现各种复杂的运动控制要求。
而基于PLC 的控制器可以满足多轴控制、精密定位和实时反馈等要求,为工业自动化提供了强有力的支持。
该案例所呈现的两轴伺服画圆等运动控制,具备高精度和高速性能,适用于各种机械设备的运动控制需求。
基于PLC的两轴进给控制系统设计
中北大学课程设计说明书学生姓名:杜宝林学号:0902014128学院:机械工程与自动化学院专业:机械设计制造及其自动化题目:数控技术课程设计——基于PLC的两轴联动进给控制系统设计指导教师:马维金职称: 教授张吉堂职称: 教授2012年12月28日中北大学课程设计任务书2012/2013 学年第 1 学期学院:机械工程与自动化学院专业:机械设计制造及其自动化学生姓名:杜宝林学号:0902014128 题目:数控技术课程设计——基于PLC的两轴联动进给控制系统设计起迄日期:12 月22日~12月28日课程设计地点:教学二号楼指导教师:马维金教授系主任:王彪下达任务书日期: 2012年12月21日课程设计任务书课程设计任务书基于PLC的两轴联动进给控制系统的设计目录1.基本模块组成---------------------------------------------------------------------------61.1.运动控制模块简介-----------------------------------------------------------------62.交流伺服电机选型---------------------------------------------------------------------73.硬件系统设计---------------------------------------------------------------------------104.软件系统设计---------------------------------------------------------------------------125.三菱FX2N-20GM硬件与编程--------------------------------------146.编写定位程序---------------------------------------------------------------------------157.操作命令表------------------------------------------------------------------------------168.双轴伺服控制系统电气原理图------------------------------------169.运行与仿真----------------------------------------------------1710.总结---------------------------------------------------------1811.参考资料-----------------------------------------------------18基于PLC的两轴联动进给控制系统设计1基本模块组成在当代工业控制领域中,PLC一直拥有不可比拟的优越性,而工业控制水平的日趋提高也给 PLC提出了更高的控制要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的两轴进给控制系统设计
PLC(可编程逻辑控制器)是一种用于自动化控制的电子设备,常用于工业生产线和机械设备中。
本文将介绍基于PLC的两轴进给控制系统的设计。
设计目标:
我们的设计目标是实现一个稳定可靠的两轴进给控制系统,能够精确控制机械设备在X轴和Y轴方向上的进给速度,并能够根据需要进行加减速控制。
系统需要具备以下功能:
1.以一个主轴的运动作为参考,控制另一个轴的运动;
2.可以根据用户设定的参数实现线性或非线性的进给速度;
3.能够进行坐标变换,实现相对运动和绝对运动的控制;
4.能够进行加减速控制,使机械设备平稳启停;
5.具备错误检测和报警功能,保证系统的安全运行。
硬件设计:
PLC作为控制系统的核心设备,需要与其他硬件组件配合完成控制任务。
硬件设计的主要组成包括:
1.传感器:用于检测机械设备的位置和速度,常用的有编码器和位置传感器;
2.伺服系统:用于控制和驱动机械设备的运动,包括伺服电机、驱动器和控制器;
3.运动控制卡:负责与PLC进行通信,将PLC的指令转换为实际的运动控制信号;
4.人机界面(HMI):用于人机交互,通过触摸屏或按钮等设备设置和监视系统参数。
软件设计:
软件设计是PLC控制系统的关键部分,主要包括以下几个方面:
1.PLC程序设计:根据设计目标,编写PLC程序实现对两轴进给控制的逻辑运算和运动控制指令的发送;
2.运动规划算法:根据用户设定的参数,实现对进给速度和加减速的控制,包括S曲线和梯形曲线等算法;
3.坐标变换算法:实现相对坐标和绝对坐标的转换,根据设定的参考轴进行运动;
4.错误检测和报警机制:通过监测传感器和系统状态,实时检测系统运行中的错误和异常,并及时进行报警和停机处理。
系统运行流程:
系统的运行流程如下:
1.读取用户设定的参数,包括进给速度、加减速度、参考轴等;
2.初始化系统,包括伺服系统的使能和复位操作;
3.根据设定的参考轴,读取并计算当前参考轴的位置和速度;
4.根据进给速度和加减速度设定,进行运动规划,计算出当前轴的目标速度和位置;
5.通过控制器将目标速度转化为伺服系统可以识别的控制信号,发送给伺服电机进行驱动;
6.监测传感器检测到的实际位置和速度,与目标值进行比较,进行位置修正;
7.当达到目标位置时,停止运动,并进行下一个运动指令的处理;
8.在系统运行中,及时监测系统状态和异常情况,进行错误检测和报警处理。
总结:。