几种云台控制协议
电梯监控方案
XXXX电梯监控系统一、序言随着经济的发展和城市规模的不断扩大,宾馆、酒店、写字楼等高层住宅不断增加,电梯的安装和使用数量也越来越大;电梯的使用在给人们出入高层建筑带来便利的同时,由于电梯故障所造成的人员伤亡和经济损失也越来越大;因此,,已成为也采取1.,与外2.梯轿厢门夹人等事故时,不能及时报警并得到及时救助;随着城市规模不断扩大,电梯数量日益增多,电梯安全检测部门应及时掌握全市各类电梯的运行状态,从而及时有效地预防各类电梯事故的发生;基于以上问题,必须运用计算机技术和现代通讯技术,建立电梯运行监控与报警系统,从技术上根本解决上述问题;二、设计依据安全防范工程工序与要求GA/T75民用建筑电气设计技术规范JGJ/T16-92民用建筑闭路电视系统工程设计规范GB50198-94智能建筑设计EBD-03-95,建立,服务,把电梯监控系统建成符合实际需要,经济实用,技术先进,操作方便,可扩展能力强,管理规范的一流的安全防范监控系统;四、监控设计方案根据XXXX的实际情况,在每个电梯轿厢上安装1台红外高清彩色摄象机,共70部电梯,安装70台摄像相机,通过光纤传输到监控室,监示器上显示实时监控图像,机房录象机储存图像,一便查询;前端部分前端设备由96高清摄像机组成,尽可能全面地对电梯轿厢内进行安全监测;传输部分传输部分由电梯专用防屏蔽网线,电源线,光纤线等组成;本系统所使用的所有线缆均具有屏蔽效能并采用一线贯通方式,中间无任何接点,从而保证图像清晰度及系统的长久性和稳定性;终端部分终端部分是系统的中枢,由数字监控主机,监视器等组成;智能数字监控主机具有监视,录像,回放,一体的智能数字监控系统,具有优质的画面回放效果,同时可连接到局域网,远程传送视频信号;五、主要设备选型1、数字监控主机选用性能稳定运行可靠的大华64路硬盘录像机系统;大华64路网络硬盘录像机4K高清数字监控主机压缩功能◆支持PAL / NTSC4.43 / NTSC3.58 制式视频信号;◆视频压缩采用H.264压缩技术,不仅支持变码率,而且支持变帧率;◆可设定视频图像质量,也可设定视频图像的压缩码流;◆视频和音频信号压缩后生成复合的H.264码流,码流回放时视频和音频保持同;制云台和镜头、雨刷等◆可通过网络远程升级,实现远程维护,方便用户以后的升级维护以及功能扩展;录像功能◆支持:手动录像、定时录像、移动检测录像、报警录像;◆支持手动录像、定时录像、移动检测录像、报警录像内容的分类检索;◆视频移动动态检测功能,每路视频可设置多个动态检测区域,提供10个灵敏度等级部分区域屏蔽功能,每路视频可设置多个屏蔽区域;◆提供全屏蔽开关,可以实现实时画面全屏蔽,全屏蔽状态的时候录像不会被屏蔽;◆探头报警录像功能支持单路报警联动单路或者是多路进行录像;◆可以使用客户端管理器达到多路回放的放象模式,不影响实时图象以及录像实时监看监听功能◆本地监视器支持,本地VGA 支持;◆支持每个通道录像参数亮度、对比度、色度、饱和度的调节;◆显示模式8 路/16路32路/64路切换迅速,没有延迟;◆内置多种云台控制协议,可以通过前面板或者遥控器控制云台和镜头、雨刷等;◆提供全屏蔽开关,可以实现实时画面全屏蔽,全屏蔽状态的时候录像不会被屏蔽;◆支持回放、预览同时进行;◆; ◆析;◆◆播;◆◆通过客户端管理器备份录像机中精确时间段内指定通道的录像内容;前段采用大华960P电梯专用摄像机★网络高清摄像机★表面氧化处理★360°可旋转;调节方便,镜头安装:Board Lens:2.8七、售后服务及技术保障所有设备出厂三个月内有问题可调换,一年内免费保修,保修期内一切非人为原因造成损坏,全部免费维修,如确属人为原因造成损坏,将适当收取材料费;保修期满后提供长期咨询、服务、有偿维修;根据需要可随时为客户更新、添置设备;开发应用软件、升级应用软件;报价单备注:此报价为独立布光缆方案;报价单。
PELCO D_P协议
PELCO D、P通讯协议一、PELCO协议介绍1、PELCO主控与前端解码器是通过RS422\RS485通信格式传输。
2、除PELCO原装设备支持RS422和RS485兼容接口,国内大部分厂家主控和接收设备仅支持RS485接口,RS485接口是半双工通信模式,即发送端发过去的控制命令,只管发出去,不管你收不收得到,有的厂家连续发,有的间隔发,总类很多。
停止命令往往发1、2条。
如PELCO\PANASONIC、三星等大厂做的通信接口,主控发出去命令,接收端收到命令返回SCK命令给主控,叫回答命令,告知发送端我已收到命令,不用再发了,这就是RS422通信模式的一种用途。
3、PELCO协议内容包括云台控制命令、摄像机控制命令、辅助控制命令、预置位设置和调用命令。
注意:网上PELCO协议版本众多,建议看家选择英文版本,中文版本很多错误。
4、Pelco P protocol details are proprietary, non-public documents. In almost all cases, Pelco's publicly available ASCII, G, or D protocols can be used in place of Pelco P with the appropriate translator. Pelco Product Support technicians may be able to assist you in obtaining the use of these protocols for your application. ASCII, G, and D protocols can be obtained be filling out our online registration form located here. For further assistance please contact Pelco Product Support at (800)298-9100 or (559)292-1981./sites/global/en/sales-and-support/support-services/obtaining-pelco-protocol.page二、PELCO-D协议数据格式:1位起始位、8位数据、1位停止位,无效验位。
PELCO-D控制协议

同步字 地址 节
Command Command(指 Data(数 Data 2 校验字
1
令码) 2 据) 1
节
同步字节为$FF。
地址字节为受控制的PG解码器的 十六进制地址,从1开始编号
校验字节为Word2到Word 6的检验和(CheckSum)
校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节
Data1(Word5)数据码1控制水平方向速度00-3FH Data2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。 辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同 上,
设置 清除
Word 3 00 00
00 00 00 01
2、 镜头控制命令 光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01
关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 现方式做保护处理对用户上传分享的文档内容本身不做任何修改或编辑并不能对任何下载内容负责
亚安云台说明书
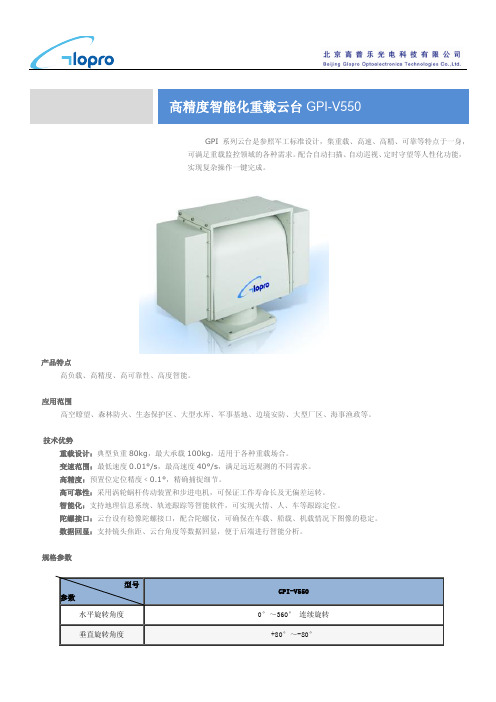
GPI 系列云台是参照军工标准设计,集重载、高速、高精、可靠等特点于一身,
可满足重载监控领域的各种需求。
配合自动扫描、自动巡视、定时守望等人性化功能,实现复杂操作一键完成。
产品特点
高负载、高精度、高可靠性、高度智能。
应用范围
高空瞭望、森林防火、生态保护区、大型水库、军事基地、边境安防、大型厂区、海事渔政等。
技术优势
重载设计:典型负重80kg ,最大承载100kg ,适用于各种重载场合。
变速范围:最低速度0.01°/s ,最高速度40°/s ,满足远近观测的不同需求。
高精度:预置位定位精度﹤0.1°,精确捕捉细节。
高可靠性:采用涡轮蜗杆传动装置和步进电机,可保证工作寿命长及无偏差运转。
智能化:支持地理信息系统、轨迹跟踪等智能软件,可实现火情、人、车等跟踪定位。
陀螺接口:云台设有稳像陀螺接口,配合陀螺仪,可确保在车载、船载、机载情况下图像的稳定。
数据回显:支持镜头焦距、云台角度等数据回显,便于后端进行智能分析。
规格参数
高精度智能化重载云台GPI-V550。
onvif协议的 c++例子

一、介绍ONVIF协议是一种用于网络视瓶监控设备之间通信的开放标准。
它提供了一种标准化的方式来实现不同厂商生产的设备之间的互操作性,使得用户可以方便地使用不同厂商的设备来搭建一个统一的网络视瓶监控系统。
二、C++语言与ONVIF协议C++是一种广泛应用于系统级开发和嵌入式系统等方面的编程语言,其灵活性和高效性使其成为了开发网络视瓶监控设备的常用语言之一。
通过C++语言编写的程序可以实现对ONVIF协议设备的控制和管理,包括获取设备信息、控制摄像头云台、获取摄像头的实时视瓶流等功能。
三、ONVIF协议的C++例子下面我们来展示一个简单的使用C++语言实现对ONVIF协议设备的控制和管理的例子。
假设我们已经安装了ONVIF协议设备的SDK,并在C++项目中成功引入了相关的头文件和库文件。
1. 初始化SDK在C++项目中,我们首先需要初始化ONVIF协议设备的SDK,这通常包括调用SDK提供的初始化函数,并传入相关的参数。
初始化成功后,我们就可以开始使用SDK提供的各种功能了。
```cpp#include "onvif_sdk.h"int m本人n() {ONVIFSDKInit("username", "password", "xxx");// 其他操作}```2. 获取设备信息一旦SDK初始化成功,我们就可以使用SDK提供的函数来获取设备的各种信息,比如设备的基本信息、支持的服务、设备的配置参数等等。
```cppDeviceInfo deviceInfo;GetDeviceInfo(deviceInfo);// 输出设备信息```3. 控制摄像头云台ONVIF协议设备通常都支持摄像头云台的控制,比如控制摄像头的俯仰、左右旋转等等。
我们可以使用SDK提供的函数来实现这些操作。
```cppPTZControl("up", 1);```4. 获取实时视瓶流我们还可以使用SDK提供的函数来获取设备的实时视瓶流,以实现实时监控的功能。
论现有基于RS485/232云台镜头控制协议在IP网络应用上的不足及其解决方法

关 键 词 : 台镜 头控 制 协 议 ;P网络 ; 足 ; 决 方 法 云 I 不 解
8/3 对 鱼 些些 竺 竺 里 竺 望竺 里 丝 堕墅 端通 过 4 52 2 云 台镜 头进 行 各 种控 制操 !型 竺 坚! ! 兰 l应用 背景 作。 ! !: 中国正处于社会急剧转型期 , 对安防设备 根据用户控制云 台的过程 , 可知影响 云台 和校验 : 2 6的和校验值 。 第 - 的需 求也因此 日 益高涨 ,其 中视频监控设备是 c m n l C mm n 2定 义 见 如 下 21 控 制主要 有图像实时性 、控制命令实时性两 因 0 ma d 、 o a d .- 3 最主要 的市场 。 随着社会 的发展 、 视频技术 的进 素。 如果用户看到的图像 与实际的图像一致 、 用 步, 视频监控越来越被广泛地应用到各个领域 , 描 述 。 户端 的控制命 令与 设备 控制端 的控 制命 令 同 21 C m n C m n2的定义 .. o mad 3 l和 o mad 具有广 阔的发展前景 。 基于 I P网络 的视频监控 那 数据 包 中 C m n 1和 C mm n 2的定 步 , 么用户端对云 台的控制与设备控制端对 o mad o ad 由于其 数字化 独特 的优势 ,是视频监控发展 的 云台的控制就是一致 的。 当图像 出现延时 、 控制 义 如 下 必然 趋 势 。 B t i; ' Bi6 t BI Bi t 4 Bi l 3 Bi t 2 命令 出现 延时 , 就可能产生两端状态 视频监控 系统经历 了三个时代 : c 咖 衄d 自 开标 志 0 l 动 0 自动开 , 动 摄 像头 开, 手 若 光 圈关 光 圈开 焦 距 近 右 0 m 上 左 的不 同步 , 如果采用现有基于 R 4 5 S8/ 第一 时代 : 模拟时代 。视频 以模 拟方式采 Co mm ̄ 焦 远 变 倍 丈 变倍 、 下 2 2云台镜头控制协议, 3 因其直发 、 单向式 、 持续 辅 助功能定义如下 : 用同轴电缆进行传输 ,并 由控制主机进行模拟 Co ma d】 C o ma d Daal Da a m n m n2 t t2 性执行 的特点 , 导致云台镜头不可控。 处理 。 0 0 0】0 一8 设置 o o o 9 以下是 采用 现有 基 于 R 4 52 2云 台镜 S 8 /3 第二时代 : 半数 字时代。视频 以模 拟方式 0 0 010 .8 清除 0 0 0 B 头控制协议当控制命令延时时对云台镜头控制 采用 同轴电缆进行传输 ,由多媒体控制主机或 22现有 协议 的特点 。由以上 21 . . 小节 对 影响的分析。 硬盘 录像机进行数字处理与存储。 EC 现有 云台镜 头控 假定 图像没有延 时 , 控制命 令有延时 t那 , 第三时代 : 字时代。视频从前端 图像 P L O协议 的介绍不难得 出 , 全数 221 单 么用户在 n 时刻看到的执行命令效果 图像应 是 采集设备输 出即为数字信号 ,并以网络为传输 制协 议有 以下几个 特点 :.. 协 议是 直发 、 媒介 , 于 T PI 议 , 基 C/ P协 采用 流媒体 技术 实现 向式 的 , 发端不 知到收端是否收到 、 何时收 到; n t — 时刻 的用 户发 出的操作 命令 执行 的结果 , 2 . 在 视频在 网上传输 , 是视频监控发展的必然 趋势 。 2 . 收端 除非 收到下 一个命 令或定 时执行 完 其延时示意图见图 32所示 。为便于描述 , 图 .2 段时间外 .收端在相当长的时间里一 直在执 32所 示 中 , 2 . t 。 = 由于历史原 因 ,目前还有 很多控制协议 、 由图 3 . 2所示 ,当用户在 n 3时刻 见到 的 + 即命 控制方式还是沿用第 一代 、 第二代时期所应 用 行原有命令, 令是持续性执行 的。 进行 云台命令控制 。 的方式 。 由于应用的环境发生变化 , 但 一些原来 3现有基协 议在 I P网络上 的不足及其原 图像不是 自己所需 的图像 , 由于命令延 时, 云台并未执行任何命令。 当用户 应用地很好 的控制协议 、控制方法在第三代数 因 现有 云台镜头控制协议直发 、单向式 、 持 在 n 4时刻 见到 的图像仍 不是 自己所需 的 图 + 字时代出现了一些 问题 。现有传统基于 R 4 5 S8/ 2 2云台镜头控制协议就是一个例证 。 3 续性执行的特点在第一代 、第二代视频监控系 像 , 户再次进行 云台命令控制。 用 由于网络延时 统应用 中, 由于第一代 、 第二代系统 中的云 台镜 2 ,所 以直到 n 5 + 时刻才 出现用户所需的图像 , 2 现有 云台镜头控制协议的特点 S8 但 实际 由于历史 的原 因, 内外云 台镜头 控制协 头控制 都是控制 主机 通过 R 4 5总 线直 接通 于是用户进行发送停止操作。 由于延时 , 国 议并没有一个统一的标准 , 而是 由各云台 、 监控 信进行控制 的, 从命令发送到执行的时延很 小 , 上直到 n 8 + 时刻才进行停止操作 。由于现有云 设备生产厂商 自己定义 ,造 成现今云 台镜头控 可以认 为同步 。即用户程序端所看到的云 台镜 台镜 头控制协议都是直发 、单向式以及持续 执 所以其问又多执行 了数次“ ” 上 操作 , 导 制协议很多 。尽管各个厂商的云台控制协 议的 头状态与实际 的云 台镜头状态一致 ,这样 用户 行方式 , + 各不相 同, 但它们的控制方式是基本一样 的 , 都 所进行 的操作就是他所期望的操 作。因此现有 致最后停在 n 8时刻 的图像并不是用户所需 要 是基于 2 24 5控制 ,不 同的仅仅是控制指 令 云台镜头控制协议在第 一代 、 3 /8 第二代视频 监控 的图像。 中的命令 字而 已。由于美 国 Pl 公司在监 控 系统应 用得 很好 , 在 I ent eo c 但 n r 网络上 , t e 情况却 图像 延时对 云 台镜 头控制 的影 响与控制 图 . P网络远程控制 云台的 命 令相类 似 , 在此不再赘述 。 行业的地位 , P l 协议是 国内 目前最流行 、 发生 了变化 。 31是 I 其 eo c 最常用 的云台控制协议 ,是最为典型 的云 台控 制 协议 。因此 , 以下 以 P l _ e oD协议 为例 , c 分析 现有协议 的特点 。 2 Pec D 协议简 述 。Pl — 控制 协 ~ lo e oD c 议 约定 : 所有 的适用协 议 , 都为 R 4 5 S 8 数据 格 式; 解码器( 解码器可理解为本文中的设备控制 端 )收到其他命 令时 , 先为 自动的功能将 停 原 止 ; 自动模 式功能以外的功能命 令, 除 云台功能 命令如果在 3 秒 内没有 收到停止命令 , 自动 0 将 停止 ; 镜头方 面的命令 如果在 l 内没有 收到 0秒 停止命令 , 自动停止 。 将
pelco协议设置预置点问题
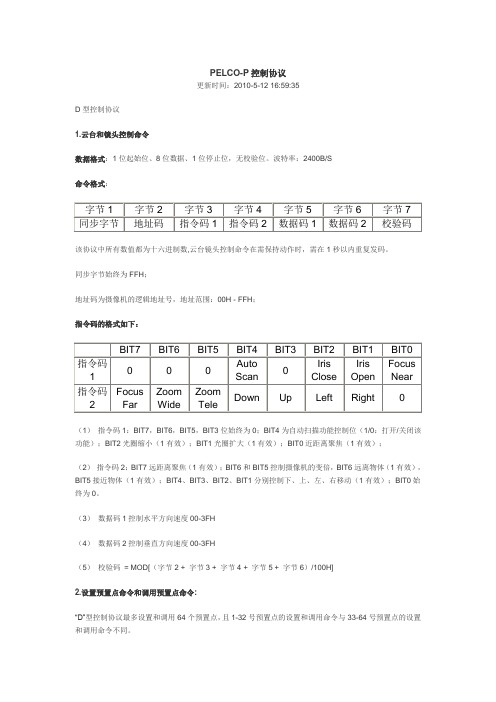
PELCO-P控制协议更新时间:2010-5-12 16:59:35D型控制协议1.云台和镜头控制命令数据格式:1位起始位、8位数据、1位停止位,无校验位。
波特率:2400B/S命令格式:该协议中所有数值都为十六进制数,云台镜头控制命令在需保持动作时,需在1秒以内重复发码。
同步字节始终为FFH;地址码为摄像机的逻辑地址号,地址范围:00H - FFH;指令码的格式如下:(1)指令码1:BIT7,BIT6,BIT5,BIT3位始终为0;BIT4为自动扫描功能控制位(1/0:打开/关闭该功能);BIT2光圈缩小(1有效);BIT1光圈扩大(1有效);BIT0近距离聚焦(1有效);(2)指令码2:BIT7远距离聚焦(1有效);BIT6和BIT5控制摄像机的变倍,BIT6远离物体(1有效),BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下、上、左、右移动(1有效);BIT0始终为0。
(3)数据码1控制水平方向速度00-3FH(4)数据码2控制垂直方向速度00-3FH(5)校验码= MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]2.设置预置点命令和调用预置点命令:“D”型控制协议最多设置和调用64个预置点,且1-32号预置点的设置和调用命令与33-64号预置点的设置和调用命令不同。
(1)1-32号预置点设置和调用命令:设置预置点命令调用预置点命令(2)33-64号预置点的设置和调用命令设置预置点命令调用预置点命令例:在2号摄像机上先设置一个15号预置点,再调用这个预置点号,命令如下:设置预置点:FF 01 00 03 00 0F 13调用预置点:FF 01 00 07 00 0F17在2号摄像机上设置一个40号预置点,再调用这个预置点号,命令如下:设置预置点:FF0102FF07010A调用预置点:FF0102FF0700093.开始和停止自动扫描:在执行自动扫描命令前需先设置63号预置点和64号预置点,分别为自动扫描的左限位和右限位。
监控多路云台控制和解码器的接线方法

监控多路云台控制和解码器的接线方法所有的云台每一个都要接上一个解码器,每个解码器通过并接以后总的485线通过码转换器接入主机,每个解码器有相应的地址码。
然后通过监控软件控制就可以了。
顺便给你附个解码器的说明书,但是各个厂家的是不一样的哦初学者的问题,如2个云台的通信线并在一起,地址调成1、2号,波特率调一样,协议调一样。
在电脑的COM1口插个232转485无源码转换器。
在电脑屏幕启动云台调试软件或者采集卡软件,设置相关采集卡参数。
即可控制。
比较多地协议:PELC-P,PELC-D协议PELCO_D的居多波特率4800 9600居多先接线,按解码器上端口说明和云台端口说明,一一对照接好。
接好后通电自检一下。
看能不能动主机与解码器通调线,主机要接码转换器(232-485),线别接反了,tx-485a,rx-485b再解码器设置,对地址码、波特率、协议。
一定要有说明书。
搞错了挺烦的。
再根据你设置的参数,在软件里设置相应的地址码、波特率、协议基本上应差不多了如何设置云台地址码?云台的协议就是云台和操作系统进行交流的一种方式或者说是一种机器的语言,操作系统通过这一种语言对云台进行控制,解码器说明书:一、主要参数:1. RS485通迅,最远1200m ;2. 多种控制协议,(可以根据用户要求定做协议);3. 体积:110×80×14mm ;4. 可以安装到7寸以上的室内外球机上;5. AC24V供电,适用于AC24V的球形云台;6. 内置10W开关模块电源,可提供DC12V/500mA稳压电源给摄像机供电;7. 可控制三可变镜头、全向云台和一组辅助开关。
二、协议设置:4位拔码开关ON=1 OFF=0序号协议拔码开关位置波特率适用范围备注0 PELCO-DPelcod-2400 派尔高系列/康银主机Hc-96001 HY9600 德加拉、康银系列2 VICON( surveyor99)4800 PICO2000系统唯康主机3 Kalatel(kdt-312) DCW06019600 卡拉特设备DCW系统DCW 系统4 DH大华//KCL2400/19200 大华/凯创嵌入式KCL-19200DH-24005 NEOCAM9600 耐康姆系统6 PIH1016 (利凌)2400 利凌矩阵7 B019600 明景/维多8 PELCO-P9600 派尔高主机/德加拉主机9 HN-C9600 华南光电系列10 SAMSUNG9600 三星快球11 KODICOM –RX KRE-301RX9600 PICASO主机Kodicom主机增加光圈控制功能12 RM110/S16019600 诚丰系列/三乐系列13 红苹果9600 红苹果矩阵14 银信V1200/9600 银信矩阵地址码从0开始15 SANTACHI-450/9600卡拉特KDT348矩阵48009600/ 4800 三立矩阵卡拉特矩阵Kdt304 -4800注:KODICOM和PIACSO卡增加了控制光圈功能,详见底页说明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
几种云台控制协议
Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
PELCO产品协议解析
PELCO (派尔高)的监控器材在我国有很广泛的应用。 PELCO有自己的传输控制协议,
当它的产品配套使用时,可以互相兼容。但在某些情况下,由于工程的需要,要求用其它
设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
诶诺基数码科技有限公司的视频解码软件可完全兼容PELCO协议,可通过PC机控制 PELCO的各种设备。
本文为你详细解析PELCO常用协议之一:PELCO-D协议
PELCO-D协议
PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步字 地址码 命令字1 命令字2 数据1 数据2 校验码
所有的值都是用的 16进制表示。
同步字通常都是 $FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字 1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码 为0 为0
自动/手动扫描 摄像机打开/
关闭
光圈关闭 光圈打开 焦距拉近
命令字2 焦距拉远 视角变宽 视角变窄 上 下 左 右 为0
Sence码与Bit4和Bit3有关。在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和
和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。当然如果Bit4或Bit3为0的话那
命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCO-D & PELCO-P协议格式
高速球的设置主要包括协议的选择和消息的发送。高速球的型号是:TMD-SCS18DN
使用的协议有:BO1,ALEC,PELCO-9600,PELCO-4800,PELCO-2400,
AO1,SANTACH1650,PEARMAIN, ,HD600,LILIN,KALATEL,VCL,TOTA,WJ-
FS616,PHILIPS,AD.厂家设置的是PELCO-2400.
该协议的具体内容如下:
PELCO-D协议一般用于矩阵和其它设备之间的通信。它的格式如下:
Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
同步字 地址码 命令字1 命令字2 数据1 数据2 校验码
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
命令字1 Sence码 为0 为0
自动/手
动扫描
摄像机打
开/关闭
光圈关闭 光圈打开 焦距拉
近
命令字2 焦距拉远 视角变宽 视角变窄 上 下 左 右 为0
Sence码与Bit4和Bit3有关。在Bit4和Bit3为1的情况下,如果Sence码为1,
则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄
像机关闭。当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是
$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
PELCO-P协议
PELCO-P协议一般采用RS-485传输,波特率为4800,1位起始位和停止位,8位
数据位,无校验。其格式如下:
Byte Value Function
1 $A0
起始码
2 $00 to $1F
地址码
3 Data byte 1
数据位1
4 Data byte 2
数据位2
5 Data byte 3
数据位3
6 Data byte 4
数据位4
7 $AF
停止码
8 $00-$FF
校验码
起始码是固定值$A0。
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
数据位1到4的意义如下:
Bit number
7 6 5 4 3 2 1 0
数据位
1
0
摄像机打开 自动扫描 摄像机打开/关闭 光圈关闭 光圈打开 焦距拉近 焦距拉
远
数据位
2
0
视角变宽 视角变
窄
下 上 左 右
0
数据位
3
平移速度 $00(停止)到 $3F(高速)以及$40(最高速)
数据位
4
上下移动速度$00(停止)到 $3F(最高速)
停止码是固定值 $AF 。
校验码是 Byte2 到 Byte6 这 5 个数的异或值(XOR)。
地址码是从 0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,
EXTENDED COMMANDS:
In addition to the “PTZ” commands shown above, there are control
commands that allow you access to the more advanced
features of some equipment. The response to one of these commands is
four bytes long. The first byte is the synchronization
character (FF), the second byte is the receiver address, the third byte
contains the alarm information and the fourth byte is the check sum.
PTZ命令控制说明:
⒈ 当控制云台水平、上下方向动作或“IRIS”、“FOCUS”、“ZOOM”时需要使相应的控
制位为“1”,不用控制的相应位置为“0”
⒉ 当需要云台PAN/TILT两方向同时动作时,只需将PAN/TILT的相应控制位置“1”
即可,PAN/TILT的速度控制由WORD5/WORD6决定
⒊将WORD3、WORD4的所有位置为“0”可以停止云台的动作
5、扩充命令
(1)、设置预置点
WORD3 WORD4 WORD5 WORD6
00H 03H 00H XX
XX=00H~3FH(PRESET NUMBER)
(2)、清除预置点
WORD3 WORD4 WORD5 WORD6
00H 05H 00H XX
XX=00H~3FH(PRESET NUMBER)
(3)、清除全部预置点
WORD3 WORD4 WORD5 WORD6
00H 07H 00H 77
(4)、调用预置点
WORD3 WORD4 WORD5 WORD6
00H 07H 00H XX
XX=00H~3FH(PRESET NUMBER)
(5)、运行巡视序列
WORD3 WORD4 WORD5 WORD6
00H 07H