基于嵌入式多信息融合的列车测速定位系统
华为列控系统的列车定位和地车通信方式

西门子列车控制系统本学期我们学习了《城市轨道交通列车运行控制系统》这门课程,列车运行控制系统包括列车自动防护系统(ATP)、列车自动运行系统(ATO)、列车自动监控系统(ATS)。
从中也了解到有西门子、华为、日立、阿尔卡特等许多这样的公司研发了列车自动运行控制系统,他们的系统各有各的优缺点。
下面介绍一下华为列控系统。
中国列车运行控制系统(CTCS)是在我国铁路高速线路和客运专线上,保证列车行车安全,提高列车运行效率的重要技术装备之一。
C3列控系统基于GSM-R无线通信技术,兼容C2列控系统,符合C3级标准要求,满足最高运营速度350km/h、列车正向运行追踪时间间隔3分钟的要求华为公司自主研发的“CTCS-3级中国列车运行控制系统”(简称C3列控系统)。
C3列控系统包括车载设备和地面设备两大部分。
车载设备负责接收地面命令,生成速度模式曲线,监控列车运行,保证列车行车安全。
地面设备主要根据联锁办理的进路,给车载设备发出行车许可、紧急行车等命令。
其中,车载安全计算机和RBC是C3列控系统的关键设备,负责处理大部分C3业务,二个硬件平台的功能直接影响系统运行的性能。
,国内厂商大都采取和国外厂商合作的方式共同开发C3列控系统,尤其是关键设备。
与此同时,华为凭借多年的科研积累及成熟的软硬件平台,在深入理解ETCS及CTCS 标准的基础上,自主研发了包括安全计算机和RBC在内的C3列控系统。
1、列车定位高速铁路列车定位技术有更高的要求,列车的速度达到350km /h,最小追踪间隔为3min,并且300km/h及以上动车组不装设列车运行监控装置,在300km/h及以上线路,列控系统车载设备速度容限规定为超速2km/h报警、超速5km/h触发常用制动、超速15km/h触发紧急制动。
这些技术原则要求高速铁路列车运行控制系统必须在任何时刻、任何地方都能确定列车的准确位置,包括列车的行车安全的相关间隔、速度、加速度及轨旁设备和车载设备资源的分配。
列车定位及精确停车技术探讨
列车定位及精确停车技术探讨摘要:如何动态、精确地检测城市轨道交通列车的位置和速度,是列车控制系统的核心和关键,本文首先对城市轨道交通常见的列车定位技术和其原理进行介绍,并对各项定位技术的优劣进行分析比较。
同时,结合实际,以宁波轨道交通采用的信号系统的列车定位技术为例,深入研究和探讨列车定位对信号系统以及城市轨道交通运营的影响,推动列车定位和精确停车技术的研究。
关键词:信号定位精确停车Abstract:How to dynamically and accurately detect the location of the train and speed,is the core and key of ATC.This paper first introduces the urban rail transitlocation technology and principle,then analyze and compare the advantages and disadvantages of each location technology.At the same time,combining with the actual to the SIGlocation technology adopted by NBRT as an example,in-depth research and discussion SIG location technology and the influence tourban rail transit,to promote the location technology and precise parking technology research.KeyWords:SIG、location technology、precise parking引言信号系统作为城市轨道交通的重要组成系统之一,主要用于指挥和控制列车运行,其所包含的各项技术,对行车安全和高效率运营起着极为重要的作用。
CTCS-2基础
CTCS-2列控系统简介前言列车速度的不断提高,靠地面信号行车已不能保证行车安全,必须靠车载信号设备对列车实施运行控制,ATP已成为行车安全不可缺少的重要技术装备。
20年纪90年代以来,世界范围内掀起了一个轮轨高速铁路建设的新高潮,其特点集中表现在高速度、高舒适度、高安全度和高效率。
近年来,作为世界上铁路最发达的地区,欧洲铁路公司和信号公司在对各自的既有信号系统进行升级改造的同时,在欧盟委员会和国际铁路联盟的推动下,为信号系统的互联和兼容问题制定了相关的技术标准,并研制和开发了相关的产品,其中就包括列车运行控制系统——ETCS标准。
为推动我国铁路运输事业的发展,从2002年开始,铁道部就组织有关专家开始了中国列车运行控制系统(CTCS)相关技术标准的修订工作,并先后颁布了《CTCS 2级技术条件(暂行)》等一系列技术文件。
目前,我国铁路在经历了先后五次的大提速后,列车最高运行速度已经达到了每小时160公里,但铁路也始终面临着公路、航空等其他运输方式的激烈竞争。
随着人们物质、文化、生活水平的提高,对铁路运输的效率、舒适和便捷程度都提出了更高的要求,铁道部于2005年提出了的第六次铁路提速的宏伟计划,要求在既有的七大干线上实现200km/h的客运列车运行速度,同时建设和开通铁路客运专线,进一步提高铁路运输服务的总体水平。
随着我国铁路跨越式发展战略的实施,实现全国铁路的第六次大提速,将列车最高运行速度提高到200km/h或更高,是进一步提高铁路运输服务总体水平,满足人民群众日益增长的出行需求的重要举措。
通过轨道电路完成列车占用和完整性检查,连续向列车传送控制信息,并采用大容量点式应答器向高速列车传送定位信息、进路参数、线路参数、限速和停车信息等,是CTCS2级确定的列车运行控制方式。
第1章 CTCS-2列控系统简介1.1 相关名词1. CTCS-2 Chinese Train Control System Level 2中国列车控制系统2级2. ATP( Automatic Train Protection )列车自动防护3. ETCS European Train Control System 欧洲列车控制系统4. ATO(Automatic Train Operation)列车自动驾驶系统5. ATS(Automatic Train Supervision)列车自动监控系统6. CTC (Centralized Traffic Control)调度集中7. LEU(Line side Electronic Unit)轨旁电子单元8. ATC(Automatic Train Control) 列车自动控制系统9. GSMR(GSM for Railway)铁路专用全球移动通信系统10.LKJ 列车运行监控装置1.2 概述既有线提速、客运专线建设和高速铁路研究,对信号技术的发展既提出了新的挑战,也提供了难得的发展机遇。
列控复习点

1列控的含义:利用各种先进的技术和设备,保证列车以最小安全间隔距离运行,以达到最大的运输能力。
(保证列车安全和高效的运行)2 列控原理:根据前方行车条件,为每列车产生MA ,并通过地面信号和车载信号的方式向司机提供安全运行的凭证(地面设备);车载设备根据接收到的MA 产生允许速度,当列车速度超过允许速度时控制列车实施制动,使列车降速乃至停车,保证行车安全(车载设备)。
3 列控的基本(主要)功能:在不干扰机车乘务员正常驾驶的前提下有效地保证列车运行安全。
(或是完成对线路上运行列车的进路安全和速度控制)(或间隔控制、速度防护、 安全防护)。
4 列控技术的发展历程:地面人工信号、地面自动信号、机车信号、ATS 装置、速度自动防护系统、(ATC 城轨)。
5 CTCS 分级:CTCS-0—CTCS-4,共五级。
6 城轨列控系统组成及划分:ATS,ATO.ATP 三部分组成;技术上可分为速度码控制的固定闭塞、基于目标距离控制的准移动闭塞、CBTC 系统三种。
7轨道交通信号系统发展推动力:重大事故驱动,运营需求引导,技术发展推动8作用在列车上的力:列车牵引力F ,列车运行阻力W (基本阻力(机械阻力和气动阻力)和附加阻力),列车制动力B 。
9列车运动状态:牵引加速 C = F-W ,惰行匀速C = -W ,制动减速C = -(B+W)。
10空转的概念及危害:轮轨间的纵向水平作用力超过最大静摩擦力,轮轨接触点将发生相对滑动,机车动轮在强大力矩的作用下快速转动,轮轨间的纵向水平作用力变成了滑动摩擦力,其数值比最大静摩擦力小很多,而机车运行速度则很低。
在静止或速度很低时,导致轮轨间摩差很大,损耗钢轨,甚至能产生事故。
11 黏着力:在黏着状态下,轮轨间的水平作用力最大值。
黏着系数:黏着力与轮轨间垂直载荷之比。
12打滑现象:当制动力大于黏着力时,轮轨将发生滑行,即车轮将被“抱死”(不转动)。
(空车、黏着系数低、紧急制动、低速尤其快停车时等情况均容易发生滑行)。
CTCS系统详细介绍

第一章列车运行控制系统在国内外发展现状近年来随着人工智能技术,计算机及其相关技术的飞速发展,世界各国都开始了用高新技术改造传统铁路运输模式的研究,目的在于提高铁路运输效率,增强铁路运营安全,提高服务质量,减少环境污染。
如作为欧洲21世纪干线铁路总统解决方案的欧洲铁路运输管理系统ERTMS,法国铁路的连续实时追踪自动化系统ASTREE,日本新干线的列车运营管理系统COMTRAC和COSMOS,北美的先进列车控制系统A TCS,列车间隔控制系统PTS和PTC,美国旧金山港湾铁路的先进列车控制系统AATC,日本的新一代列车控制系统ATACS 及计算机和无线电辅助列车控制系统CARA T等。
其中代表世界先进水平的高速铁路列控系统的如德国LZB系统:采用轨道环线电缆传送列控信息;日本DS-ATC系统:采用有绝缘的数字轨道电路传送列控信息;法国UM2000+TVM430系统:采用无绝缘数字轨道电路传送列控信息(分级控制);但以上三种高速列控系统均采用大量专有技术,相互间不兼容,技术平台不开放。
欧洲ETCS系统:为实现欧洲铁路互联互通,欧盟组织确定了适用于高速铁路列控的标准体系,技术平台开放;基于GSM-R无线传输方式的ETCS2系统,技术先进,并已投入商业运营;欧洲正在建设和规划的高速铁路均采用ETCS列控系统,是未来高速列车控制系统的发展方向。
我国铁路地域广大、列车种类繁多、提速以后线路允许速度不统一,同为绿灯却有多种速度含义。
另外,我国铁路行车主要特点是客货混跑、高低速列车共线运行,这样必然要求客货列车均需装备ATP,从而使得我国发展ATP的难度明显大于国外。
我国铁路实行以地面信号为主、以机车信号为辅的行车方式,对列车运行实行开环控制,依靠司机严守信号保证行车安全。
因此,习惯于现有机车信号+监控装置的控车模式。
目前,机车普遍安装的通用机车信号未达到主体化的水平。
机车信号基于轨道电路和站内电码化,但轨道电路制式繁多,有的根本不能满足“主体化”的要求,将面临淘汰。
城市轨道交通CBTC系统关键技术探讨

城市轨道交通CBTC系统关键技术探讨随着计算机和通讯技术的飞速发展,自动控制技术也得以迅猛发展,广泛应用于城市轨道交通行业。
为提高城市轨道交通的运营效率,人们研发出一种基于无线通信的列车自动控制系统,即CBTC系统。
文章主要就轨道交通CBTC系统关键技术进行了相关的分析,以供参考。
标签:城市轨道交通;CBTC系统关键技术;列车自动驾驶子系统(ATO)目前我国城市轨道交通运行速度和运行密度的不断提高,实现高水平列车自动驾驶的系统功能则成为CBTC信号系统的关键。
一、CBTC系统及其构成CBTC系统由ATS子系统、ATP、ATO子系统、联锁子系统、DCS子系统等构成,各子系统均采用模块化设计。
ATP子系统是保证行车安全、防止错误进路、防止列车进入前方列车占用区段和防止超速运行的设备。
ATP负责全部的列车运行保护,是列车安全运行的保障。
ATO即列车自动驾驶,它代替司机操纵列车驱动、制动设备,自动实现列车的启动、加速、匀速惰性、制动等驾驶功能。
在ATP系统的基础上安装了ATO系统,列车就可以采用手动方式或自动方式行驶。
ATS在ATP和ATO系统的支持下,根据运行时刻表完成对列车运行的自动监控,可自动或由人工监督和控制正线(车辆段、试车线除外),及向调度员和外部系统提供信息。
DCS数据通信系统的主要作用是在各个子系统之间传输ATC 报文。
(一)CBTC技术组成CBTC 技术包括:⑴无线通信技术,⑵移动闭塞技术,⑶列车定位技术。
由于CBTC 是基于无线通信的列车控制系统,自然离不开通信技术的支持。
无线通信的种类很多,常见的有基于OFDM(正交频分复用技术)通信、扩展频谱通信、跳频技术、WLAN(无线局域网)技术。
移动闭塞是实现CBTC的关键技术之一,CBTC是这种闭塞方式的应用系统。
它与固定闭塞相比,其最显著的特点是取消了以信号机分隔的固定闭塞区间。
列车在线路上运营的间隔距离由列车在线路上的实际位置和运行情况确定,闭塞区间随列车的形势,不断变化,故称为移动闭塞。
列控系统基础

成列车占用检测及完整性检查,连续向列车传送控制信息。点 式信息设备传输定位信息、进路参数、线路参数、限速和停车 信息。
列控系统速度检查方式,入口速度检查方式。 速度-距离模式曲线控制方式
采用速度-距离模式的列控系统,如德国LZB系统,日本新 干线数字ATC系统。 (3)按照人机关系分 设备优先控制方式。如:日本新干线ATC系统。 司机优先控制方式,如:法国TVM300/430系统、德国LZB系统。
ETCS的分级
ETCS二级:轨道电路+查询应答器+GSM-R
与一级相比,司机完全依靠车载信号设备行车(可取消地 面信号机);通过GSM-R连续传送列车运行控制命令,车 -地间可双向通信;在点式设备的配合下,车载设备对列 车运行速度进行连续监控;依靠轨道电路或计轴设备检查 列车占用和完整性;建有无线移动闭塞中心。该系统是基 于移动通信的连续式ATP。
网络传输层
地面设备层
车载设备层
CTCS体系结构
我国CTCS列控系统简介
铁路运输管理层 铁路运输管理系统是行车指挥中心,以CTCS为行车安全保障基础,通过通信 网络实现对列车运行的控制和管理。
网络传输层 CTCS网络分布在系统的各个层面,通过有线和无线通信方式实现数据传输。
地面设备层 地面设备层主要包括列控中心、轨道电路、点式设备、无线通信模块等。列 控中心是地面设备的核心,根据行车命令、列车进路、列车运行状况和设备 状态,通过安全逻辑运算,产生控车命令,实现对运行列车的控制。
基于SINS/GPS/OD组合导航的列车定位方法的研究

ZHAO ig LU o LI Jn Ya ANG n — n Di g we
( h n qn nvri f o t a dT l o C o g igU ies yo ss n ee mmu iain , h n qn , 0 0 5 C ia t P c nc t s C o g ig 4 0 6 , hn ) o
,
l
。
一
主滤波器
u1 1。 l
圊
GS P 二二
l
子滤波器l
1 ,
I 1
l
面
0 D L 予 滤
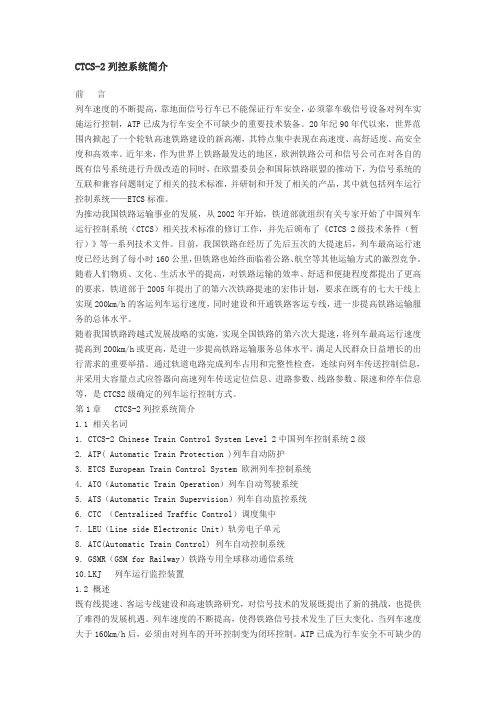
图 1 SlS, S OD的联 邦卡尔曼滤波器模型 N GP /
22 子 系统模型 . 自主式 、 隐蔽性 导航 , 工作 环境不 受介质 限制 , 提供 丰富 的导 航信 能 1状 态变 量 ) 息, 以及导航 数据输 出率高等优 点 , 是 ,I 但 SNS也存在 其 固有缺 陷 . 本 系统 中. 捷联惯导系统为公共参考系统 . 根据对 SN 性能和误 IS 如定 位误差 随时间积 累, 初始对准时 间长 . 以长时间独立 作 难 里程 SN 计 ( D) O 是用 来测量车辆在 地面行驶 速度 和距 离的仪 器 . 具有 较强 的 差 源的分享 .I S的误差状态量为: X : 5 8 6 E s\ L h 却 U ‘E ‘N ‘U e 8 8 p P P 自主 性 和 成 本 低 的优 点 , 缺 点 是 容 易 导 致 累 积误 差 . 的误 差 主 要 其 它 来 源于计数误差 和轮径磨耗[. 5 本文将这三种导航 设备通过计算机有 1 . s V V V] () 1 机地组合在一起 . 应用卡尔曼等数据处理技术 . 发挥各 自特 点 . 取长补 其 中, ,A, 分别 为指北方位系统在地 理坐标系 中的纬度 、 乩 5 矾 经 短, 使列车组合定位系统的精度 、 可靠性和 自动化程 度都大为提高 度 和 高 程 的定 位 误 差 ; , , 分别 为指 北 方 位 系 统 在 东 向 、北 向 6 6, ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 3 9卷 第 1 2期
Vo l - 3 9
・
计
算
机
工
程
2 0 1 3 年 1 2月
De c e mb e r 2 01 3
NO . g i n e e r i n g
轨 道交通专题 ・
文章编号:1 0 0 0 — - 3 4 2 8 ( 2 0 1 3 ) 1 2 — 伽1 1 —I l 6
GU O Zi - g a n g , ZH AO J i a n — b o , NI Mi ng
( T h e 3 2 n d R e s e a r c h I n s t i t u t e o f Ch i n a E l e c t r o n i c s T e c h n o l o g y Gr o u p Co r p o r a t i o n , S h a n g h a i 2 0 0 2 3 3 , Ch i n a )
[ A b s t r a c t ]T r a i n s p e e d d e t e c t i o n a n d p o s i t i o n i n g a r e k e y t e c h n o l o g i e s f o r i m p r o v i n g t h e s a f e t y a n d e ic f i e n c y o f t r a i n o p e r a t i o n .
f a c t o r s i n t r a di t i on s y s t e m i s s ol v e d. Si mu l a t i o n r e s u l t s i n Ma t l a b s h o w t h a t t he s ys t e m c a n e f f e c t i v e l y i mp r o ve t he p r e c i s i on of t r a i n s pe e d d e t e c t i o n a nd po s i t i o ni n g.
a r e e mp l oy e d t o c o l l e c t t r a i n s t a t us i n f o r ma t i o n.Fe d e r a l Ka l ma n il f t e r i n g a n d t he mu l t i — s e n s o r i n f o r ma t i o n f u s i o n me t h o d a r e u s e d t o p r oc e s s t h e s e i nf o r ma t i o n i n a n e mb e d d e d s ys t e m .P r o b l e m of e r r o r s c a us e d b y t r a i n whe e l d i a me t e r we a r i n g ,i d l i n g ,s l i d i ng a n d o t he r
关键 词 :嵌 入式 ;信 息融 合 ;多传 感器 ;列车 ;测 速 ;定位
Tr a i n S pe e d De t e c t i o n a nd Po s i t i o ni ng Sy s t e m Ba s e d 0 n
Em be dde d M ul t i . i n f o r ma t i o n Fus i o n
传感 器 信息 融合 的 列车 测速 定 位系 统 。通 过轮 轴速 度 传感 器 、多普 勒雷 达 速度 传感 器 、加速 度 计和 查询 应答 器采 集 列车 的状 态信
息 ,并在 嵌 入式 系统 中利 用联 邦 K a l ma n滤波 及 融合 技术 对信 息进 行 处理 ,实现 测速 轮径 的 自适应 校 正以及 空转 / 滑 行 的检测 与补 偿 ,减小 由于 车 轮磨 损、 空转 、滑 行 、环 境等 因素 造成 的列 车测 速定 位误 差 。Ma t l a b仿 真结 果表 明 ,该系 统能 够有 效提 高列 车测 速定 位 的精度 。
文 献标识码; A
中 围分类号: U 2 3 1 . 7
基 于嵌 入 式 多信 息 融合 的 列 车测 速 定位 系统
郭自刚,赵建波, 倪
摘
明
( 中国 电子科 技集 团公 司 第三 十二 研究 所 ,上海 2 0 0 2 3 3 )
要 :列 车 的测 速定 位 是提 高列 车运 行 安全 及运 输 效率 的 关键技 术 。为 此 ,根据 国内外 研究 发展 现状 ,提 出一种 基于 嵌入 式 多
pr oc e s s o r a nd mul t i — s e n s or i nf o r ma t i o n f u s i o n. An a xl e s p e e d s e ns o r ,a Do pp l e r r a d a r s p e e d s e n s or ,a n a c c e l e r a t i o n s e ns o r a nd q ue r y ba i l s