ATM-L系列磁致伸缩位移传感器
一种双冗余lvdt式位移传感器设计

收稿日期:2015-03-30,修回日期:2015-05-13作者简介:蒋晓彤(1969-),女,研究员,主要研究方向:伺服电子测量㊂2015年12月宇航计测技术Dec.,2015第35卷 第6期Journa1of Astronautic Metro1ogy and MeasurementVo1.35,No.6文章编号:1000-7202(2015)06-0010-04 中图分类号:TB921文献标识码:A一种双冗余LVDT 式位移传感器设计蒋晓彤 刘俊琴 王首浩(北京精密机电控制设备研究所,北京100076)摘 要 介绍了一种双冗余LVDT 式位移传感器及其变换电路㊂传感器运用差动变压器式工作原理,采用串联冗余结构形式,实现了结构串联㊁功能并联的双路冗余线位移测量㊂测量参数采用数字拟合的方法,解决了串联双冗余LVDT 位移传感器的固有特性决定的线性度较低㊁无法满足系统任务指标要求的问题,提高了测量信号的线性度㊁系统的控制精度,缩短了调试周期,提高了效率,满足了新一代控制系统高可靠性的要求㊂关键词 双冗余 LVDT 位移传感器A Design for Dual-redundancy LVDT Displacement SensorJIANG Xiao-tong LIU Jun-qin WANG Shou-hao(Beijing Research Institute of Precise Mechanica1and Contro1Equipment,Beijing 100076)Abstract A kind of dua1-redundancy LVDT disp1acement sensor and its converting circuit are in-troduced.To achieve dua1-redundancy disp1acement measuring by the structure in series and the function in para11e1,the differentia1transformer with series redundancy structure is designed.To so1ve the prob-1ems of 1ow 1inearity which is the inherent characteristics of series dua1-redundancy LVDT disp1acement sensor and unab1e to meet the target requirements of system,the method of digita1fitting is used to meas-uring parameters.Then the 1inearity of measurement signa1and contro1precision of system are improved;debugging time is shortened;efficiency is enhanced and the requirements of high re1iabi1ity for the contro1system of new generation are met.Key words Dua1-redundancy LVDT Disp1acement sensor1 引 言随着信息数字技术高速发展,数字闭环控制技术也在系统中得到了广泛应用,闭环控制回路中采用非接触式差动变压器(以下简称LVDT)式位移传感器作为反馈元件㊂由于产品可靠性的提高,传统的单余度LVDT 式位移传感器已无法满足系统高可靠性的要求,因此,在系统的闭环控制中采用了双冗余LVDT 式位移传感器方案㊂双冗余LVDT 式位移传感器的固有特性决定了其精度较低,每个传感器均需要与系统进行配调㊂LVDT 传感器参与系统调试时,传统的配调方法是采用模拟信号变换电路进行调试,仅对系统的零偏和增益进行简单补偿,该模拟配调方法复杂㊁调试周期长,为提高系统性能而所能采用的控制策略有限,因此提出双冗余LVDT 传感器的数字拟合方法㊂2 LVDT 位移传感器的原理LVDT 式位移传感器作为一种位移检测传感器,具有工作寿命长㊁灵敏度和分辨率高㊁精度和线性度好等诸多优点,因而在许多行业中用作精密的位移检测部件㊂位移传感器采用螺管形差动变压器,其工作原理如图1所示,同一般变压器原理,传感器需一交流电源,提供给初级线圈,产生一个交变磁场,两次级线圈(包括台阶形的补偿线圈)按电势反向串联,当铁芯处于两次级线圈的中间位置时,两次级线圈产生的感应电势大小相等,方向相反,输出电压U ㊃SC =0,当铁芯偏离中间位置时,两次级线圈之间的互感发生变化,两者的感应电势不再相等,有U ㊃SC 电压信号输出,该信号经变换器变换成与铁芯移动量大小和方向一致的直流电压,即达到铁芯的位移量转换成电压信号输出之目的㊂图1 位移传感器原理图传感器安装在被测系统内部,传感器铁芯组件安装在系统安装座上,一个拉杆带动两个铁芯随被测产品一起进行往复运动,实现线位移的测量,作为闭环控制的反馈信号,实现系统的闭环控制㊂3 双冗余LVDT 位移传感器设计3.1 结构组成双冗余LVDT 位移传感器的结构示意如图2所示㊂双冗余LVDT 位移传感器是在传统LVDT 位移传感器的基础上,在壳体(序号2)内安装两个独立的线圈组件(序号1和6)串联而成,这两套独立的线圈组件共用一套铁芯串联的铁芯组件(序号3),两个线圈组件间设计有隔环(序号4)及垫片(序号5),用来隔开两线圈组件的磁路㊂1-线圈组件I;2-壳体;3-铁芯组件;4-隔环;5-垫片;6-线圈组件Ⅱ;7-引出线锁紧组件;8-端盖图2 双冗余LVDT 位移传感器结构示意图图2中线圈组件I 和线圈组件Ⅱ主要由各自的骨架㊁线圈㊁骨架两端的短路环和屏蔽套组成,该结构使线圈组件I 和线圈组件Ⅱ形成各自的闭合磁路㊂铁芯组件由两个铁芯I 和导杆I㊁导杆Ⅱ组成,其结构示意如图3所示㊂铁芯组件的导杆和铁芯螺纹联接处采用真空钎焊,以使其能在恶劣的振动和冲击环境下可靠的工作㊂两个串连的铁芯分别与线圈组件I 和线圈组件Ⅱ构成独立的电磁回路,实现双冗余的位移量测量㊂1-导杆I;2-铁芯I;3-导杆Ⅱ;4-铁芯I图3 铁芯组件组成示意图3.2 结构特点3.2.1 串连结构双冗余LVDT 位移传感器是将两个由非金属隔环隔开的线圈组件安装在一个传感器壳体内部串连而成的㊂这两个串联线圈组件的几何尺寸和电气参数均完全相同,且共用一个活动铁芯组件;活动铁芯组件的两个导磁体的几何尺寸也完全相同,中间用不导磁材料隔开;设计中使两串联线圈组件与其对应铁芯构成各自的闭合磁路㊂当传感器的铁芯组件随被测产品进行往复运动时,两个串连的传感器线圈组件同时输出,最终实现结构串连㊁功能并联的结构紧凑㊁高可靠的双冗余LVDT 线位移测量㊂3.2.2 线圈绕线方式为了扩大传感器线性范围㊁提高灵敏度和生产㊃11㊃ 第6期 一种双冗余LVDT 式位移传感器设计合格率,传感器线圈缠绕方式采用在骨架上紧密排绕5~6层初级线圈后,分阶排列次级线圈的补偿式绕线方法㊂为满足传感器的线性度要求,必须保证传感器在额定行程范围内磁场均匀,采用直径为0.06mm聚酰亚胺漆包线,用误差法计算补偿线圈长度和宽度,确定阶梯式绕制方案,找出补偿线圈的最佳长度和宽度;保证了在额定行程范围内磁场均匀,提高了线性度,同时也提高了产品合格率㊁降低了成本㊂以上措施,使传感器初始线性度控制在2%以内㊂3.2.3 引线方式在传感器出线方面,线圈组件I的四根引出线通过短路环及隔环出线槽,与线圈组件Ⅱ的四根引出线最后一同引出,用八种不同的颜色来区分两线圈组件输出导线,引出线选用耐高温多股软导线,提高了引线强度;引出线通过锁紧组件用锁紧螺母挤压橡胶垫圈抱紧引出线,避免了引出线折断使传感器失效,保证了传感器引出线的安装可靠性㊂3.3 技术途径3.3.1 零位长度双冗余位移传感器是在传统的LVDT位移传感器设计基础上,在壳体内由两个独立线圈组件串联而成,线圈组件间设计有隔环及垫片,用来隔开两线圈组件的磁路㊂铁芯组件长度确定后,在传感器调试中,两线圈组件的中心通过调整隔磁垫片的厚度来保证传感器的零位长度及传感器两线圈组件零位输出的一致性㊂3.3.2 线性度根据LVDT位移传感器的工作原理可知,铁芯长度与线圈长度是决定线性量程和线性度的关键尺寸㊂为了满足系统结构安装空间要求,在材料强度允许的前提下,传感器壳体采用薄壁结构,增加了传感器内部体积;并将传感器铁芯的外径减小,缩小了传感器骨架的内径㊂从而扩大了可绕线部分窗口尺寸,使线圈长度增加,且次级线圈采用阶梯缠绕方式,提高了传感器的线性度㊂根据传感器设计手册中提供的传统计算方法,初级线圈的长度为X L=4X Li+Kˑd(K=4~8)(1)式中:X L 为传感器线圈长度;X Li 传感器电气行程;K 经验系数;d 线圈平均直径㊂经计算,初级线圈长度取值范围为98mm~ 130mm㊂由于传感器安装空间的限制,设计的传感器壳体两线圈有效绕线长度仅为59mm,远远小于传统的设计要求长度,其线性度也无法满足不大于1%的任务要求㊂因此,为提高双冗余LVDT位移传感器的线性度和精度,采用了数字拟合补偿方法㊂4 LVDT变换电路设计为实现通过数字拟合的方式提高LVDT位移传感器的线性度和精度,设计时结合系统的数字闭环控制的硬件资源,实现了LVDT位移传感器的数字拟合㊂LVDT变换电路的功能框图如图4所示,由LVDT信号调制解调电路㊁A/D采集电路㊁DSP信号处理电路和总线接口电路组成㊂图4 LVDT变换电路功能框图LVDT信号调制解调电路产生LVDT传感器需要的正弦激磁信号,传感器副边的输出信号输入到调制解调电路,经过信号处理输出位移电压信号;位移电压信号经A/D芯片转换为数字信号后输入到DSP信号处理器;DSP通过总线接口电路接收计算机的数据拟合系数,由DSP实现LVDT传感器的数字拟合,提高了系统数字闭环控制精度㊂5 LVDT测量参数的数字拟合5.1 数字拟合方法在LVDT位移传感器生产完成以后,其固有线性度和精度即以确定,通过实际测量得到传感器输出位移Y与调制解调电路输出的位移电压X的关系矩阵,使用mat1ab中的P=POLYFIT(X,Y,N)函数,计算得到位移电压X的拟合系数P,P=[P(1),P(2), P(N),P(N+1)],即得到拟合后的位移量y与位移电压X的关系为㊃21㊃宇航计测技术2015年y =P (1)ˑX N +P (2)ˑX N -1+ +P (N )ˑX +P (N +1)(2)综合考虑系统的控制精度和DSP 信号处理电路的运算能力,线位移拟合时采用五阶数字拟合㊂使用计算机计算得到上述拟合系数后,通过总线在线装订参数,即系统测试仪通过总线接口将拟合系数写入DSP 信号处理器内的FLASH 存储区内,在系统数字闭环控制时即使用五阶拟合后的位移反馈数据进行闭环运算,有效提高了系统的闭环控制精度㊂5.2 数字拟合结果分析在系统里通过DSP 数字信号处理器,对位移传感器的测试数据进行数据拟合,采用软件对位移传感器的线性度进行相应的补偿㊂图5所示为三个传感器6个位移通道的测量误差,从图中可见误差具有一定的规律性㊂图6所示为六条误差曲线的平均值和对平均误差曲线的拟合结果㊂根据拟合公式对六个测量通道进行补偿后得到图7所示补偿后的误差曲线㊂因为是根据六条误差曲线平均数据进行补偿,所以补偿线性度为1%左右,若对每个通道传感器单独进行补偿,线性度可达到0.5%以下㊂图5 补偿前误差曲线5.3 试验结果分析实际生产中将单路位移传感器线性度控制在1.2%左右后进行组装测试,但因两线圈组件安装在同一传感器壳体内部且距离近,存在磁场干扰㊂补偿前后位移传感器线性度数据对比见表1㊂目前,线性度能够满足系统要求的ɤ1%的产品很少,采用数字拟合㊁软件补偿的方法相对采用传统的反复缠绕试验㊁修正补偿线圈绕制的方法,提高了线性度㊁缩短了生产周期㊁提高了产品合格率㊂图6平均误差和拟和结果图7 补偿后误差曲线表1 补偿前后数据对比表设计要求值测试项目位移I(%)位移Ⅱ(%)位移ɤ1%补偿前线性度1.026~1.5880.968~1.812补偿后线性度0.114~0.6120.076~0.9726 结束语为了满足控制系统高可靠性的要求,设计了一种新型的双冗余LVDT 式位移传感器,巧妙地实现了结构串联㊁功能并联的双路冗余线位移测量,提高了系统线位移测量的可靠性,并为LVDT 式位移传感器的多余度设计奠定了基础㊂由于双冗余LVDT 位移传感器线性度较低,无法满足系统任务指标要求,采用了位移测量信号数字拟合方法,有效提高了闭环控制反馈信号的测量精度,满足了系统任务要求㊂另外,采用测量信号数字拟合与参数在线装订的方法,缩短了系统性能调试周期,提高了生产效率㊂(下转第52页)㊃31㊃ 第6期 一种双冗余LVDT 式位移传感器设计从表1可见,改进阈值法处理后的信噪比高于指数型阈值法和双曲型阈值法,均方差则相对低于另外两种方法㊂表1 不同阈值方法对比结果加噪信号评价标准指数型阈值法双曲型阈值法改进阈值法Bumps (15.3598dB)Bumps(10.0523dB)信噪比19.801619.798020.1412均方差0.18390.18420.1771信噪比18.047217.954218.2575均方差0.22530.22780.21995 改进方法在管道泄漏检测中的应用将油气集输管道泄漏检测中的压力信号,采用改进的阈值函数对其进行滤波处理,分解尺度N 选为5,阈值选取方法为minimaxi,小波基函数运用sym6,经过阈值去噪后的结果如图7所示㊂其中a 图为实测压力信号,b 图为去噪后信号㊂改进的小图7 实测管道泄漏信号处理结果波阈值去噪方法能够有效地消除噪声还原有用信号,提高信噪比,为后续的泄漏点的判断和定位打下良好的基础㊂6 结束语分析了硬阈值和软阈值函数的不足,同时对指数型和双曲型阈值函数进行了分析,并在此基础上提出了改进的阈值方法,不仅克服了硬阈值和软阈值函数的缺点,而且与指数型和双曲型阈值函数相比也有很大的优势㊂实验结果表明改进的阈值函数有很好的去噪能力,能够保留信号本身细节特点为后续的数据处理打下良好的基础㊂参考文献[1] David L.Donoho,Iain M.Johnstone.Adapting to unknownsmoothness via wave1et shrinkage [J].Journa1of the A-merican Statistica1Association,1995,90(12),1200~1224.[2] 齐敏,黄世震.基于Mat1ab 的小波去噪算法研究[J].电子器件,2012,35(1),103~106.[3] 苏成志,陈洪印,孟凡一.新阈值二进小波去噪算法在齿轮信号中的应用[J].计算机工程与应用,2014,50(18),206~209.[4] 刘希佳,陈宇.小目标识别的小波阈值去噪方法[J].中国光学,2012,5(3),248~256.[5] 王浩全,王军,金相男.基于双曲线阈值函数的小波阈值降噪方法[J].中北大学学报(自然科学版),2010,31(6),625~630.[6] 刘卫东,刘尚合,胡小锋.小波阈值去噪函数的改进方法分析[J].高电压技术.2007,10(33):59~63.[7] 曲志刚,封皓,靳世久.基于提升小波的管道安全系统信号特征提取方法[J].传感器与微系统.2010,29(5):㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂㊂59~62.(上接第13页)参考文献[1] 王绍纯.自动监测技术[M].北京:冶金出版社,1988.[2] 袁希光.传感器技术手册[M].国防工业出版社,1986.[3] 李科杰.传感器最新进展和技术动向.传感器世界,1996(7):13.[4] 唐敏,黄刚.传感器技术的现状与未来[J].传感器世界,1996(7):12.[5] 樊尚春.传感器技术及应用.北京航空航天大学出版社.[6] 崔伟,边友.LVDT 位移传感器在伺服阀测试中的应用.传感器世界,2012.02.㊃25㊃宇航计测技术 2015年一种双冗余LVDT式位移传感器设计作者:蒋晓彤, 刘俊琴, 王首浩, JIANG Xiao-tong, LIU Jun-qin, WANG Shou-hao作者单位:北京精密机电控制设备研究所,北京,100076刊名:宇航计测技术英文刊名:Journal of Astronautic Metrology and Measurement年,卷(期):2015,35(6)引用本文格式:蒋晓彤.刘俊琴.王首浩.JIANG Xiao-tong.LIU Jun-qin.WANG Shou-hao一种双冗余LVDT式位移传感器设计[期刊论文]-宇航计测技术 2015(6)。
Q系列TMA热机械分析仪 产品介绍
-150~1000℃ ±1℃ <10min(600~50℃) 26mm(L)×10mm(D)
26mm(L)×1.0mm(T)×4.7mm(W)
±0.1% 15nm 0.5nm <1µm(-100~500℃) 0.001~2N 0.001N 无 标配 惰性、氧化或反应气体
T
标配
M A
无
无
无
无
无
注:TMA Q400可以升级为Q400EM
应力/应变,蠕变,应力松弛和动态操作模式
-99-
Q400EM
Q400EM是一款高性能、研发级的热机械分析仪 (TMA),它的操作模式、测试探头、工作夹具都具 有无可比拟的灵活性,同时能够得到灵敏的信号。 增强模式后,Q400EM可以进行动态实验以及调制 TMA(Modulated TMATM)测试,在调制测 试中样品尺度变化可以分离为可逆和不可逆成分。 Q400EM以其无可比拟的性能成为科研、教学和质 量控制的理想工具。
84
热机械分析仪 TMA
T M
A
TMA 创新历程
99
Q400EM 技术参数
100
Q400 技术参数
101
TMA 技术
102
夹具
104
TMA 原理 / 形变模式 106
TMA 应用
108
技术支持
客户青睐TA仪器的一个很重要的因素就是我们在售后 服务方面的良好信誉。我们拥有业界最强最有经验的技 术支持团队。您可以随时通过电话、email或网站与他 们取得联系。我们还提供多层次的培训机会,包括装机 现场培训、在全球各技术中心举行的研讨会和极为便捷 的在线培训课程。
TA Instruments
热分析系统
巴鲁夫微脉冲位移传感器

微脉冲位移传感器
BTL
Sensors Worldwide
BTA 输出信号一览
电压输出:
BTA-A11-... BTA-G11-... BTM-A1-... BTA-C1_-... BTA-E1_-... BTM-E1-... BTM-H1
0 - 10 V -10 - +10 V 0 - 20 mA 4 - 20 mA
便宜且可靠
可旋转的感应面
允许各种安装方式
Products
微脉冲位移传感器
BTL
Ex 外壳结构
Sensors Worldwide
尾端螺纹 不锈钢感应管
完全适用于液压缸和液位检测
将浮子保持在杆 上
磁环或浮子
刚性管接头
确保最高的防护等级
各种认证
Factory Mutual 及 CENELEC 认证
Class I, Div 1, Groups A, B, C, D Class II/III, Div 1, Groups E, F, G II G Eex d IIC T6 IP68
也可用于 DEX !!
微脉冲位移传感器
BTL
Sensors Worldwide
数字式脉冲接口
1 - 3 µ INIT 脉冲 s
PLC
脉冲-宽度-调制 (PWM Pulse-Width-Modulated ) START/STOP
5V 0V 5V
0V
微脉冲位移传感器
BTL
Sensors Worldwide
• 直接与控制器简单连接
44QFP digitizing chip
• 4/8 位处理器接口 • 同步串行数据出口 • 最大分辨率 5 µm
索拉特龙S系列位移传感器产品手册说明书
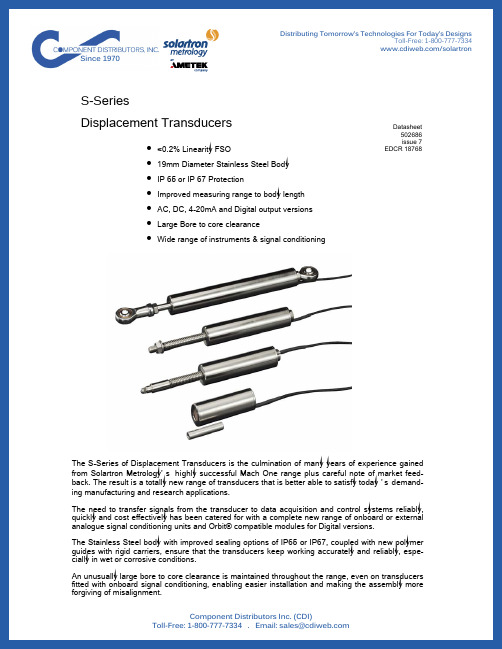
Since 1970Distributing Tomorrow’s Technologies For Today’s DesignsToll-Free: 1-800-777-7334/solartronDatasheet502686issue 7EDCR 18768 S-SeriesDisplacement Transducers• <0.2% Linearity FSO• 19mm Diameter Stainless Steel Body• IP 65 or IP 67 Protection• Improved measuring range to body length• AC, DC, 4-20mA and Digital output versions• Large Bore to core clearance• Wide range of instruments & signal conditioningThe S-Series of Displacement Transducers is the culmination of many years of experience gained from Solartron Metrology’s highly successful Mach One range plus careful note of market feed-back. The result is a totally new range of transducers that is better able to satisfy today’s demand-ing manufacturing and research applications.The need to transfer signals from the transducer to data acquisition and control systems reliably, quickly and cost effectively has been catered for with a complete new range of onboard or external analogue signal conditioning units and Orbit® compatible modules for Digital versions.The Stainless Steel body with improved sealing options of IP65 or IP67, coupled with new polymer guides with rigid carriers, ensure that the transducers keep working accurately and reliably, espe-cially in wet or corrosive conditions.An unusually large bore to core clearance is maintained throughout the range, even on transducers fitted with onboard signal conditioning, enabling easier installation and making the assembly more forgiving of misalignment.S IP 65S IP 67S RS ub m e r s i b l e S R I P 68A x i a l C o n n ec t o rL V D TD CO r b i t 4-20m A S c r e wM o u n tH i g hT e m p 'Measuring range 5 (total travel mm)1015203050100150200300MechanicalAxial connector Free Core Guided core Screw Mount High Temp,Display/ControllerSI 1000SI 3000SI 7000Remote DRC signal conditioning OD 2OD 4Note! High Temperature OD 5is for Transducers onlyBICM (15-0-15V)BICM (24V)Compatible TTL module Refer to Engineering OrbitNot Availablemeasuring range in mmLVDT +/- 2.5 +/- 5.0 +/- 7.5 +/- 10 +/- 15 +/- 25 +/- 50 +/- 75 +/- 100 +/- 150DC/DC & 4-20 mA 0-50-100-150-200-300-500-1000-1500-2000-300Digital 0-50-100-150-200-300-500-1000-1500-2000-300Linearity FSO0.20.25Electrical LVDT Sensitiv ity (mV/V/mm) ± 5%3V RMS at 5.0kHz into 100k ohm 145179121766021.51510.56.93.9Energising current (mA/V) ± 5%1.02.62.20.61.50.50.62.51.651.83Residual Voltage at null (%FSO)<0.5<0.5<0.5<0.5<0.5<0.5<0.5<0.5<0.5<0.5Electrical DC/DC & 4-20mA Input Voltage (DC)10-30V Output ripple (%FSO)0.02Bandwidth Hz (-3dB)500Environmental (transducer only)Storage temperature LVDT -40ºC to +120ºC Electrical Digital Storage temperature DC/DC & 4-20mA -20ºC to +85ºC Reading rate Up to 3906 readings per second Operating temperature LVDT -40ºC to +120ºC Bandwidth Up to 460 Hz Operating temperature DC/DC & 4-20mA 0ºC to +65ºC OutputSolartron Orbit ProtocolOperating temperature Digital* (probe only) -40ºC to +120ºC Sealing IP 67 or IP 65 Mechanical Options temperature coefficient (%FSO/ºC). Guided core <02 for +/-2.5mm. <.015 rest of range Spring return Shock Drop test 1m onto hard surface Connectors topple test x 10 onto hard surface Extra cable Vibration Sinusoidal Amplitude Univ ersal Joints see 10 to 50Hz 1-10 grms linear Output options ordering 50 to 1kHz 10 grmsguideMaterialBody 316 series Stainless Steel Core Nickel/Iron CableFEP0-10 V dc 10-0 V dc 4-20 mA 20-4 mA+/- 5 Vdc +/- 10 Vdc 0-5 V dc 5-0 V dcSince 1970Distributing Tomorrow’s Technologies For Today’s DesignsToll-Free: 1-800-777-7334/solartronGuided with Universal Joints‘A’ mm‘B1’ mm‘B2’ mm‘B3’ mmBody length Fully At null Retracted A/C Extended± 2.5 mm5553.2549.545.4± 5 mm74.564.255749.4± 7.5mm81.768.2559.951.2± 10 mm9679.2566.853.9± 15 mm110.497.2576.355± 25 mm131.9120.2589.157.5± 50 mm189.5178.2512469.4± 75 mm239.7249.25169.990.2± 100 mm297.2309.23201.1893.08± 150 mm412475309.5141.73 DC/DC & 4-20 mA5 mm9453.2549.545.4 10 mm113.564.255749.4 15 mm120.768.2559.951.2 20 mm13579.2566.853.9 30 mm149.497.2576.35550 mm170.9120.2589.157.5 100 mm228.5178.2512469.4 150mm278.7249.25169.990.2 200mm336.2309.23201.1893.08 300 mm450.9475309.5141.73 Guided with Universal JointsSince 1970Distributing Tomorrow’s Technologies For Today’s DesignsToll-Free: 1-800-777-7334/solartronFree core & Carrier‘A’ mm 'B' mm 'C' mm D' mmA/C body length core length at null± 2.5 mm33.516.540.547± 5 mm53294858± 7.5mm60.23450.962± 10 mm74.54057.7573± 15 mm88.937.567.391± 25 mm110.438.580.05114± 50 mm16850115172± 75 mm218.250160.9243± 100 mm275.750192.15303± 150 mm390.550300.72469DC/DC & 4-20 mA5 mm72.516.540.54710 mm9229485815 mm99.23450.96220 mm113.54057.757330 mm127.937.567.39150 mm149.438.580.05114100 mm20750115172150mm257.250160.9243200mm314.750192.15303300 mm429.550300.72469Free Core & Free Core with Carrieree Core & Free Core with CarrierSince 1970Distributing Tomorrow’s Technologies For Today’s Designs Toll-Free: 1-800-777-7334/solartronFree Core & Carrier Axial ConnectorAlso Available at Solartron MetrologyAddresses for offices worldwide United Kingdom - Head Office Solartron Metrology Steyning Way Bognor Regis West Sussex PO22 9STTel: +44 (0) 1243 833333 Fax: +44 (0) 1243 833322 ***********************************China - Shanghai Solartron Metrology Rm 912, Metro TowerNo 30 Tian Yao Qiao Road Shanghai 200030Zhong Renmin GongheguoTel: +86 21 6426 8111 Fax: +86 21 6426 7054***********************************JapanSolartron Metrology 4-5-37 Kamiosaki Shinagawa-ku GermanyAmetek GmbHSolartron Metrology Division Rudolf-Diesel-Strasse 16 40670 MeerbuschTel: +49 (0) 2159 9136 500 Fax: +49 (0) 2159 9136 505 ****************************China - Beijing Solartron Metrology Rm 912, Metro TowerNo 30 Tian Yao Qiao Road Shanghai 200030Tel: +86 21 6426 8111 Fax: +86 21 6426 7054***********************************USA915 N.New Hope Road Suite C,Gastonia, NC 28054FranceSolartron MetrologyRond-point de l’Espine des Champs Buroplus - Bat. D Elancourt 78990Tel: +33 (0)1 30 68 89 50Fax: +33 (0)1 30 68 89 59 ************************************China - ChengduAMETEK ChengDu Rep Office Room 2408, Zongfu Building 35 Zongfu RoadChengdu, Sichun, 610016Tel: +86 28 8675 8111 Fax: +86 28 8675 8141***********************************Introducing Your Partners:Taking the lead time out of Solartron Gage Probes.Visit:/solartronMichael HaasComponent Distributors Inc. Sales Engineer Phone: 303-357-2732Email: ***********************Steven RushingComponent Distributors Inc. Sales Engineer Phone: 303-357-2730Email: *************************Bob KrantzSolartron Metrology Email: *********************。
传感器与检测技术3电感式位移传感器

4
29
(二)互感式传感器—差动变压器
❖ 1.互感式传感器的结构与工作原理 ❖ 差动变压器工作在理想情况下(忽略涡流损耗、
磁滞损耗和分布电容等影响)时的等效电路:
30
(二)互感式传感器—差动变压器
❖ 1.互感式传感器的结构与工作原理 ❖ 当衔铁移向次级绕组N1一边,互感M1增大,M2减
小,因而次级绕组N1内的感应电动势大于次级绕 组N2内的感应电动势,这时差动变压器输出电动 势不为零。在传感器的量程内,衔铁位移越大, 差动输出电动势就越大。
0
2 0
0
0
1
线圈 铁芯
δ Δδ
8
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 变气隙式自感传感器的输出特性
L 1
SN 2 0 2 0
0
0
1
L
0 0
衔铁
L 1
/ 0
L 1 /
0
0
0
线圈 铁芯
δ Δδ
9
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 变气隙式自感传感器的输出特性
❖ 2. 原理消除零点残余电压方法: ❖ (1)从设计和工艺上保证结构对称性 ❖ 为保证线圈和磁路的对称性,首先,要求提高加
工精度,线圈选配成对,采用磁路可调节结构。 其次,应选高磁导率、低矫顽力、低剩磁感应的 导磁材料。并应经过热处理,消除残余应力,以 提高磁性能的均匀性和稳定性。由高次谐波产生 的因素可知,磁路工作点应选在磁化曲线的线性 段。
20
(一)自感式传感器
❖1.自感式传感器的工作原理
❖ 三种类型比较: ❖ 气隙型自感传感器灵敏度高,它的主要缺点是非
AMETEK位移传感器技术操作使用资料
AMETEK位移传感器技术操作使用资料AMETEK位移传感器技术操作使用资料共享AMETEK料位开关自动识别功能,并采纳2″安装嘴,可由容器内搅拌器或障碍物产生的干扰回波。
5098XTrueLevel系列智能型连续物位计 TrueLevel系列为智能型两线制连续物位掌控仪表,其由两部分构成,其中一部分用来检测物料的电特性的变化,另一部分检测物位的变化,其测量不受介质的介电常数,密度,温度和变化的影响,适用于混合罐,缓冲罐等测量场合。
输出为4~20mA,带Hart通讯协议,可整体或?/t 5091XUniversalLite系列通用智能型连续物 UniversalLite为通用型智能型两线制连续物位掌控仪表,输出为4~20mA带Hart通讯协议仪表可选就地显示装置,可选键盘调试功能。
仪表由电路单元和杆式(或缆式)传感元件构成,传感器可选多种材质,可整体或分体安装。
RS 系列电源同时具备供电和储能本领,即支持双向电流流动。
RS 放大器可颠倒交流输入的相位关系程控储能(SNK)运行模式。
RS 系列产品可*通过菜单驱动的前置面板掌控器进行操作。
背光 LCD 显示屏为您显示菜单、设置数据和回读测量数据。
产品还供给普遍用于 ATE 编程环境的 IEEE488、RS232C、USB 和 LAN 远程掌控接口和仪器驱动程序。
如此就能将 RS 系列产品轻松集成到自动测试系统中。
对于高级测试应用,程控掌控器版本能供给完整的任意波形生成功能、时域和频域测量功能以及电压和电流波形捕获功能。
盲区天线延长长度+天线长度+0.1m/4″l输出40~20mAHART或3.8—20.5mA,依据NAMURNE43输出信号0.05%(能量损耗率20mA;20°C/68°F)辨别率2Μa温度漂移一般为50ppm/k错误信号高:22mA;低3.6mA,依据NAMURNE43负载350Ωl测量精度—标准条件依据IEC770温度+20°C5°C/+68°F9°F压力值1013mbar20mbar/14.69psig0.29psig相对湿度60%15%辨别率1m m/0.04″精度3mm/0.12″发射角DN40/ANSI11/2″20°DN50/ANSI2″15°DN80/ANSI3″10°l应用条件环境温度—40~+80°C—40~+175°F;EexI:—40~+60°C/—40~+140°F存储温度—40~+85°C—40~+185°F法兰温度—40~+150°C—40~+300°F温度剧变承受力100°C/minl过程条件操作压力—1~40bar/—14.5~580psig;与过程连接和温度有光介电常数≥1.5耐振动IEC6826andprEN50178(10~57Hz:0.075mm/57~150Hz:1g)防护等级IP66/67对应于NEMA6—6Xl机械数据外壳铝湿料部分不锈钢(1.4404/316L);哈氏合金C—22(2.4602)连接部分不锈钢(1.4404/316L);哈氏合金C—22(2.4602)垫圈Viton(—40~+150°C—40~+300°F);Kalrez6753(—20~+150°C—5~+300°F)l过程连接螺纹G11/2″;NPT11/2″法兰DN40~DN150(PN/40PN16);11/2″~8″(150lb/300lb);10K(40~100)l电气连接-两线制电源终端输出非Ex/EExI24VDC(14~30VDC)EExd24VDC(20~36VDC)电气接口M20X1.5;1/2″NPT;G1/2″接线端子0.5~1.5mm?l人机界面显示9行,160160像素,8级灰阶,4按钮键盘操作语言英语,德语,法语,意大利语,西班牙语,葡萄牙语,日语,中文,俄语l认证防益出保护WHGATEXATEXllGDEExiallCT3T6ATEXll1/2GDEExd[ia]llCT3T6FMISclassIDiv.1Gr.AG;IPclassIDiv.1Gr.AG;CSAISclassIDiv.1Gr.AG;AMETEK位移传感器技术操作使用资料共享。
AMETEK与MTS相关技术指标
AMETEK与MTS 相关技术指标一、结构这两种磁致伸缩传感器结构大致相同,其中包括有:表头、电路板、外管、磁制线、温度线、浮球、重锤这七大部分。
从结构上讲,其中外管、磁制线、温度线、浮球、重锤这五个部分存在不同。
外管部分两种短杆液位计外管一致,都是不锈钢金属结构;长杆液位计外管部分区别较大,其中AMETEK外管采用PVDF材质,这种材质在受温度变化的情况下热胀冷缩比较明显,通过高低温实验,将一根12200mm的液位计放入高低温实验箱,温度从-10℃~+50℃进行观察,其中PVDF长度变化量为:11690mm~11790mm,有100mm 的变化量。
由于PVDF外管在出厂的时候磁制线底部与外管底部就存在有135mm 左右的间距,温度升高到50℃后,底部间距达到了211mm。
而MTS的外管部分是不锈钢软管,在-10℃~+50℃之间的变化量小于5mm,可以忽略不计。
磁制线部分AMETEK这部分是不能与外管分离的,后期部件损坏只能更换整根外管与磁制线,而 MTS的这部分可以进行分离,维修的时候可以单独更换磁制线,拆卸比较简单。
温度线部分AMETEK温度线为5点温度,无法单独维修。
MTS的温度线为5点(标配)、8点、12点、以及定制款(可根据用户要求定制),温度线拆卸方便,可单独维修或者更换。
浮球与重锤部分AMETEK的浮球与重锤进行安装之后,底部重锤加水浮子的距离将近150mm左右,水位盲区将近150mm。
MTS液位计经过国内改良后底部水位盲区可以缩小到10mm左右。
二、技术指标对比三、AMETEK不足处1.现在油库油罐中安装的液位计外壳必须要用防静电的材质,AMETEK的液位计原装是PVDF材质,还需要重新进行加工及组装(安装丝网)。
2.用户现在需求的温度线测控范围已经提高了很多,5个点的测温已经无法满足用户需求。
3.现在测量精度方面用户的需求也提高了很多,测量水位的问题需要重新设计重锤及浮子才能解决原装探棒的不足。
mts传感器
mts传感器MTS传感器是一种常用于测量机械位移和应变的传感器技术。
MTS 代表磁致伸缩技术,这种技术是一种通过应用磁场来测量物体位移和应变的方法。
MTS传感器采用了基于磁致伸缩效应的原理。
当施加一个磁场时,该材料会发生磁致伸缩效应,即材料的长度和体积会随着磁场的变化而发生变化。
通过测量这个变化,可以得到物体的位移或应变的信息。
MTS传感器广泛应用于工程领域,特别是在工程材料的应力和应变测量中。
它们可以测量材料在各种工作条件下的变形,从而帮助工程师们评估和改进设计。
MTS传感器可用于测量液体和气体压力、温度、速度、加速度等物理量。
此外,它们还可用于监测结构的变形和振动,以及机械系统的性能和安全性。
在测量机械位移方面,MTS传感器可以提供精确和可靠的测量结果。
通过将MTS传感器安装在需要测量的物体上,可以实时监测物体的位移变化。
这种实时监测对于许多应用非常重要,例如机械设备的故障检测和预警、桥梁和建筑物的结构健康监测等。
MTS传感器的工作原理是通过将传感器的磁致伸缩元件与被测物体连接,当被测物体发生位移时,磁致伸缩元件也会相应发生位移。
传感器测量这个位移,并将其转换成电信号。
通过对电信号的处理和分析,可以得到被测物体的位移值。
MTS传感器具有许多优点。
首先,它们具有高精度和可靠性。
由于其基于磁致伸缩效应的原理,可以实现微小位移的测量,从而提供准确的测量结果。
其次,MTS传感器具有快速响应和高频率响应的特性,可以满足高速运动和高频率振动的需求。
此外,MTS传感器具有耐高温和耐腐蚀的特性,能够在恶劣的工作环境下长时间稳定工作。
不过,MTS传感器也存在一些局限性。
首先,由于其基于磁场的原理,它对磁场干扰比较敏感,因此需要在使用过程中注意防止磁场干扰。
其次,MTS传感器的安装和调试比较复杂,需要注意正确安装和校准。
此外,MTS传感器的价格相对较高,因此在一些应用中可能需要考虑成本效益。
总的来说,MTS传感器是一种重要的工程测量技术,可用于测量机械位移和应变。
Temposonics磁致伸缩液位变送器 Level Plus – RefineME 操作手册说明书
采用Temposonics ®技术的磁致伸缩液位变送器Level Plus ®– RefineME ®四合一测量内在精度+/-1 mm API 温度校正体积缺少有计划的维护或重新校准认证危险区操作手册目录1. 联系信息 (3)2. 术语与定义 (3)3. 引言 (5)3.1 本手册的目的和用途 (5)3.2 使用符号和警告提示 (5)4. 安全说明 (5)4.1 目标用途 (5)4.2 可预见的误用 (6)4.3 安装、调试和操作 (6)5. 产品概述 (6)5.1 部件 (7)5.2 精度 (8)5.3 质保 (8)5.4 储存 (9)5.5 CRN规格 (9)5.6 型号标签 (10)5.7 技术数据 (12)6. 安装 (13)6.1 培训 (13)6.2 导波管和导杆 (13)6.3 工具 (13)6.4 安装步骤 (13)6.5 安装 (13)7. 电气连接 (14)7.1 基本信息 (14)7.2 安全建议 (14)7.3 工业拓扑 (14)7.4 推荐电缆 (15)7.5 电气导管 (15)7.6 接地 (15)7.7 安全格栅 (16)8. 调试 (17)8.1 培训 (17)8.2 工具 (17)8.3 设置软件 (17)8.4 调试步骤 (17)9. 维护 (17)9.1 培训 (17)9.2 工具 (17)9.3 检查 (17)10. 维修 (18)10.1 RMA政策 (18)10.2 培训 (18)10.3 工具 (18)10.4 设置软件 (18)10.5 故障处理 (19)11. 备品备件 (19)12. 接口 (19)12.1 Modbus (19)12.2 DDA (19)12.3 HART® (19)13. 认证机构信息 (20)13.1 认证总览 (20)13.2 证书 (22)13.3 FM (22)13.4 FMC (33)13.5 ATEX/IECEx (48)Level Plus ® RefineME ®操作手册I 3 I1. 联系信息美国常规电话:+1-919-677-0100传真:+1-919-677-2343电子邮件:*********************** 邮寄和发货地址Temposonics LLC 3001 Sheldon DriveCary, North Carolina, 27513, USA 售后服务电话:+1-800-633-7609传真:+1-800-498-4442电子邮件:***********************技术支持与应用24小时紧急技术支持电话:+1-800-633-7609电子邮件:************************* 德国常规电话:+49-2351-9587-0传真:+49-2351-56491电子邮件:*********************** 邮寄和发货地址Temposonics GmbH & Co. KG Auf dem Schüffel 958513 Lüdenscheid, Germany 技术支持与应用电话:+49-2351-9587-0电子邮件:***********************2. 术语与定义6A 重油广义原油,按照API 比重指数修正至60 °F 体积。
MAGNET-SCHULTZ位移传感器
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。