第九章 降维
13.降维法
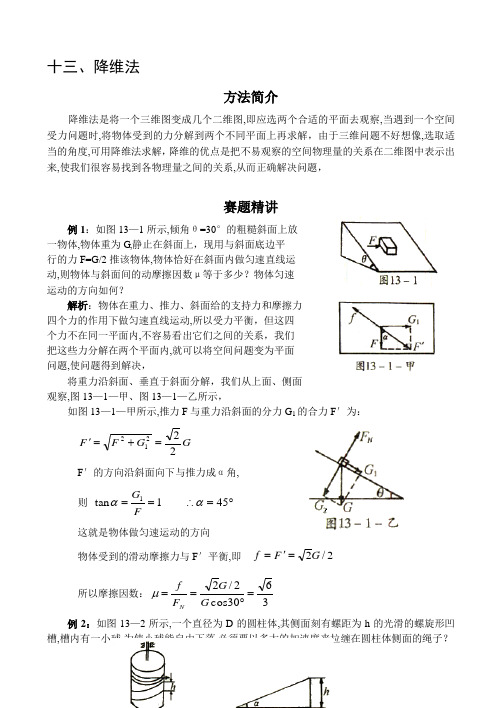
十三、降维法方法简介降维法是将一个三维图变成几个二维图,即应选两个合适的平面去观察,当遇到一个空间受力问题时,将物体受到的力分解到两个不同平面上再求解,由于三维问题不好想像,选取适当的角度,可用降维法求解,降维的优点是把不易观察的空间物理量的关系在二维图中表示出来,使我们很容易找到各物理量之间的关系,从而正确解决问题,赛题精讲例1:如图13—1所示,倾角θ=30°的粗糙斜面上放 一物体,物体重为G,静止在斜面上,现用与斜面底边平 行的力F=G/2推该物体,物体恰好在斜面内做匀速直线运 动,则物体与斜面间的动摩擦因数μ等于多少?物体匀速 运动的方向如何?解析:物体在重力、推力、斜面给的支持力和摩擦力 四个力的作用下做匀速直线运动,所以受力平衡,但这四 个力不在同一平面内,不容易看出它们之间的关系,我们 把这些力分解在两个平面内,就可以将空间问题变为平面 问题,使问题得到解决,将重力沿斜面、垂直于斜面分解,我们从上面、侧面 观察,图13—1—甲、图13—1—乙所示,如图13—1—甲所示,推力F 与重力沿斜面的分力G 1的合力F ′为:G G F F 22212=+=' F ′的方向沿斜面向下与推力成α角, 则 ︒=∴==451tan 1ααFG这就是物体做匀速运动的方向物体受到的滑动摩擦力与F ′平衡,即 2/2G F f ='=所以摩擦因数:3630cos 2/2=︒==G G F f N μ 例2:如图13—2所示,一个直径为D 的圆柱体,其侧面刻有螺距为h 的光滑的螺旋形凹槽,槽内有一小球,为使小球能自由下落,必须要以多大的加速度来拉缠在圆柱体侧面的绳子?解析:将圆柱体的侧面等距螺旋形凹槽展开成为平面上的斜槽,如图13—2—甲所示,当圆柱体转一周,相当于沿斜槽下降一个螺距h,当圆柱转n 周时,外侧面上一共移动的水平距离为22122at n D =π① 圆弧槽内小球下降的高度为221gt nh =② 解①、②两式,可得,为使螺旋形槽内小球能自由下落,圆柱体侧面绳子拉动的加速度应为hDga π=例3:如图13—3所示,表面光滑的实心圆球B 的半径 R=20cm,质量M=20kg,悬线长L=30cm ,正方形物块A 的 厚度△h=10cm,质量m=2kg,物体A 与墙之间的动摩擦因 数μ=0.2,取g=10m/s 2,求:(1)墙对物块A 的摩擦力为多大?(2)如果要物体A 上施加一个与墙平行的外力,使物体A 在未脱离圆球前贴着墙沿水平方向做加速度a =5m/s 2 匀加速直线运动,那么这个外力大小方向如何?解析:这里物体A 、B 所受的力也不在一个平面内,混起来考虑比较复杂,可以在垂直于墙的竖直平面内分析A 、B 间压力和A 对墙的压力;在与墙面平行的平面内分析A 物体沿墙水平运动时的受力情况,(1)通过受力分析可知墙对物块A 的静摩擦力大小等于物块A 的重力,(2)由于物体A 贴着墙沿水平方向做匀加速直线运动,所以摩擦力沿水平方向,合力也沿水平方向且与摩擦力方向相反,又因为物体受竖直向下的重力,所以推力F 方向应斜向上,设物体A 对墙的压力为N,则沿垂直于墙的方向,物体B 受到物体A 的支持力大小也为N,有θμtan ,Mg N N f ==而又因为43tan 53sin ==++∆=θθ所以R L R h 在与墙面平行的平面内,对物体A 沿竖直方向 做受力分析,如图13—3—甲所示有mg F =αsin沿水平方向做受力分析,有 ma f F =-αcos 由以上各式,解得 )5/5arcsin(,520)()(22==++=a N ma f mg F因此,对物体A 施加的外力F 的大小为205N,方向沿墙面斜向上且与物体A 水平运动方向的夹角为).5/5arcsin(例4:一质量m=20kg 的钢件,架在两根完全相同的平 行长直圆柱上,如图13—4所示,钢件的重心与两柱等距, 两柱的轴线在同一水平面内,圆柱的半径r=0.025m,钢件 与圆柱间的动摩擦因数μ=0.20,两圆柱各绕自己的轴线做 转向相反的转动,角速度./40s rad =ω若沿平行于柱轴的 方向施力推着钢件做速度为s m /050.00=υ的匀速运动, 求推力是多大?(设钢件不发生横向运动)解析:本题关键是搞清滑动摩擦力的方向,滑动摩擦力 的方向与相对运动的方向相反,由于钢件和圆柱都相对地面 在运动,直接不易观察到相对地面在运动,直接不易观察到 相对运动的方向,而且钢件的受力不在同一平面内,所以考 虑“降维”,即选一个合适的角度观察,我们从上往上看,画 出俯视图,如图13—4—甲所示,我们选考虑左边圆柱与钢件之间的摩擦力,先分析相对运动的方向,钢件有向前的速度0υ,左边圆住有向右的速度ωr ,则钢件相对于圆柱的速度是0υ与ωr 的矢量差,如图中△v ,即为钢件相对于圆柱的速度,所以滑动摩擦力f 的方向与△v ,的方向相反,如图13—4—甲所示,以钢件为研究对象,在水平面上受到推力F 和两个摩擦力f 的作用,设f 与圆柱轴线的夹角为θ,当推钢件沿圆柱轴线匀速运动时,应有22000)(22cos 2ωθr v v f vv ff F +=∆== ①再从正面看钢件在竖直平面内的受力可以求出F N , 如图13—4—乙所示,钢件受重力G 和两个向上的支 持力F N ,且G=2F N ,所以把N N F f GF μ==,2代入①式,得 推力N r v v mgr v v F F N 2)(22)(222002200=+⋅=+⋅=ωμωμ例5:如图13—5所示,将质量为M 的匀质链条套在一个表面光滑的圆锥上,圆锥顶角为α,设圆锥底面水平,链条静止时也水平,求链条内的张力,解析:要求张力,应在链条上取一段质量元m ∆进行研究,因为该问题是三维问题,各力不在同一平面内,所以用“降维法”作出不同角度的平面图进行研究,作出俯视图13—5—甲,设质量元m ∆两端所受张力为T,其合力为F,因为它所对的圆心角θ很小,所以2sin 2θT F =,即F=T θ,再作出正视图13—5—乙,质量元受重力m ∆g 、支持力N 和张力的合力F 而处于平衡状态,由几何知识可得:2cot 22cotαπθα⋅=⋅∆=Mg mg F 所以链条内的张力2cot 22απ⋅==MgF T例6:杂技演员在圆筒形建筑物内表演飞车走壁,演员骑摩托车从底部开始运动,随着速度增加,圈子越兜越大,最后在竖直圆筒壁上匀速率行驶,如图13—6所示,如果演员和摩托车的总质量为M,直壁半径为R,匀速率行驶的速率为v ,每绕一周上升的距离为h,求摩托车匀速走壁时的向心力,解析:摩托车的运动速度v ,可分解为水平速度v 1和竖直分速度为v 2,则向心力速度为Rv a 21=,处理这个问题的关键是将螺旋线展开为一个斜面,其倾角的余弦为22)2(2cos hR R a +=ππ,如图13—6—甲所示,所以有v hR R v v 221)2(2cos +==ππα向心加速度为:222221))2(2(h R R R v R v a +==ππ向心力 )4(422222h R RMv Ma F +==ππ 例7:A 、B 、C 为三个完全相同的表面光滑的小球,B 、C 两球各被一长为L=2.00m 的不可伸和的轻线悬挂于天花板上,两球刚好接触,以接触点O 为原点作一直角坐标系z Oxyz ,轴竖直向上,O x 与两球的连心线重合,如图13—7所示,今让A 球射向B 、C 两球,并与两球同时发生碰撞,碰撞前,A 球速度方向沿y 轴正方向,速率为s m v A /00.40=,相碰后,A 球沿y 轴负方向反弹,速率A v =0.40m/s ,(1)求B 、C 两球被碰后偏离O 点的最大位移量; (2)讨论长时间内B 、C 两球的运动情况,(忽略空气阻力,取g=10m/s 2) 解析:(1)A 、B 、C 三球在碰撞前、后的运动发生 在Oxy 平面内,设刚碰完后,A 的速度大小为A v ,B 、 C 两球的速度分别为B v 与C v ,在x 方向和y 方向的分速 度的大小分别为Bx v ,Cy Cx By v v v ,和,如图13—7—甲所示, 由动量守恒定律,有0=-Bx Cx mv mv ①A Cy By Ax mv mv mv mv -+= ②由于球面是光滑的,在碰撞过程中,A 球对B 球的作用力方向沿A 、B 两球的连心线,A 球对C 球的作用力方向沿A 、C 两球的连心线,由几何关系,得⎪⎪⎭⎪⎪⎬⎫==6tan 6tan ππCy Cx By Bx v v v v ③ 由对称关系可知 Cy Bx v v = ④解①、②、③、④式可得 s m v v Cy Bx /27.1==s m v v Cy Bx /20.2==由此解得 s m v v Cy Bx /54.2==图13—7甲设C 球在x >0, y>0, z >0的空间中的最大位移为,OQ Q 点的z 坐标为z Q ,则由机械能守恒定律可写出Q C mgz mv =221 ⑤ 所以 gv z CQ 22= 代入数值解得 z Q =0.32m而Q 点到O z 轴的距离为 )2()(22Q Q Q z L z z L L QD -=--=所以C 球离O 点的最大位移量 Q Q Lz OD z OQ 222=+= ⑥代入数值,得 m OQ 13.1= ⑦由对称性,可得B 球在0,0,0>><z y x 的空间的最大位移量OP 为m OQ OP 13.1== ⑧(2)当B 、C 两球各达到最大位移后,便做回到原点的摆动,并发生两球间的碰撞,两球第一次返回O 点碰撞前速度的大小和方向分别为s m v Bx /27.1= 方向沿正x 轴方向 By v =2.20m/s 方向沿y 轴方向s m v Cx /27.1= 方向沿正x 轴方向 Cy v =2.20m/s 方向沿y 轴方向设碰撞后的速度分别为11C B v v 和,对应的分速度的大小分别为x B v 1、y B v 1、x C v 1和y C v 1,由于两球在碰撞过程中的相互作用力只可能沿x 轴方向,故碰撞后,沿y 轴方向的速度大小和方向均保持不变(因为小球都是光滑的),即y B v 1=By v 方向沿负y 轴方向 ⑨ y C v 1=Cy v 方向沿负y 轴方向 ⑩碰撞过程中,沿x 轴方向的动量守恒,则 Cx Bx x B x C mv mv mv mv -=-11 因为Cx Bx v v = 所以x B x C v v 11=即碰撞后两球在x 方向的分速度大小也相等,方向相反,具体数值取决于碰撞过程中是否机械能损失,在A 球与B 、C 两球同时碰撞的过程中,碰撞前,三者的机械能m mv E AD 82121==碰撞后三者的机械能 12222259.6212121E E m mv mv mv E C B A <=++=表明在碰撞过程中有机械能损失,小球的材料不是完全弹性体,故B 、C 两球在碰撞过程中也有机械能损失,即)(21)(21)(212222221111Y X X X Y XB BC C B B v v m v v m v v m +<+++ ○11 由⑨、⑩和○11三式,和 Cx Bx C B v v v v x X =<=11 ○12或C B C B v v v v =<=11当B 、C 两球第二次返回O 点时,两球发生第二次碰撞,设碰撞后两球的速度分别为22C B v v 和,对应的分速度的大小分别为y C x C B B v v v v y X 22,,22和,则有y y y y C B C B v v v v 1122=== y x x x C B C B v v v v 1122=<= 或 12B B v v < 12C C v v <由此可见,B 、C 两球每经过一次碰撞,沿x 方向的分速度都要变小,即x x x x x x X C B C B C B Cx B v v v v v v v v 332211=>=>=>= ……而y 方向的分速度的大小保持不变,即y t y y y y y C B C B C B Cy B v v v v v v v v 332211======= ……当两球反复碰撞足够多次数后,沿x 方向的分速度为零,只有y 方向的分速度,设足够多的次数为n,则有 0==nx nx C B v v ○13 s m v v v y ny ny B C B /20.2=== ○14 即最后,B 、C 两球一起的Oyz 平面内摆动,经过最低点O 的速度由○14式给出,设最高点的z 轴坐标为Qn z ,则 Qn Cny mgz mv =221 得gv z Cny Qn 22=代入数值,得 m z Qn 24.0= ○15 最高点的y 坐标由下式给出:Qn Qn Qn Qn z z L z L L y )2()(22-±=--±=代入数值,得:m y Qn 95.0±= ○16 例8:一半径R=1.00m 的水平光滑圆桌面,圆心为O,有一竖直的立柱固定在桌面上的圆心附近,立柱与桌面的交线是 一条凸的平滑的封闭曲线C,如图13—8所示,一根不可伸 长的柔软的细轻绳,一端固定在封闭曲线上某一点,另一端系一质量为m=7.5×10—2kg 的小物块,将小物块放在桌面上并把绳拉直,再给小物块一个方向与绳垂直、大小为s m v /0.40=的初速度,物块在桌面上运动时,绳将缠绕在立柱上,已知当绳的张力为T 0=2.0N 时,绳即断开,在绳断开前物块始终在桌面上运动,(1)问绳刚要断开时,绳的伸直部分的长度为多少?(2)若绳刚要断开时,桌面圆心O 到绳的伸直部分与封闭曲线的接触点的连线正好与绳的伸直部分垂直,问物块的落地点到桌面圆心O 的水平距离为多少?已知桌面高度H=0.80m,物块在桌面上运动时未与立柱相碰,取重力加速度大小为10m/s 2,解析:(1)这一问题比较简单,绳断开前,绳的张力即为物块所受的向心力,因为初速度与绳垂直,所以绳的张力只改变物块的速度方向,而速度大小不变,绳刚要断开时,绳的伸直部分的长度可求出,设绳的伸直部分长为x ,则由牛顿第二定律得:xv m T 200=代入已知数值得:x =0.60m(2)选取桌面为分析平面,将物块的落地点投影到此分析平面上,然后由平抛运动的知识求解,如图13—8—甲所示,设绳刚要断开时物块位于 桌面上的P 点,并用A 点表示物块离开桌面时的位置, 先取桌面为分析平面,将物块的落地点投影到此分析 平面上,其位置用D 点表示,易知D 点应在直线PA 的延长线上,OD 即等于物块落地点与桌面圆心O 的水平距离,而AD 等于物块离开桌面后做平抛运动的 水平射程,即 gH v AD 20= 故20222)2(g H v x R x OD +-+= 代入已知数值得物块落地点到桌面圆心O 的水平距离 m OD 47.2=例9:如图13—9所示是一种记录地震装置的水平摆,摆球m 固定在边长为L,质量可忽略不计的等边三角形的顶点A 上,它的对边BC 跟竖直线成不大的夹角α,摆球可以绕固定轴图13—8BC 摆动,求摆做微小振动的周期,解析:若m 做微小振动,则其轨迹一定在过A 点,垂直于BC 的平面内的以O 为圆心,OA 为半径的圆弧上,因此我们可以作一个过A 点垂直于BC 的平面M,如图13—9—甲所示,将重力mg 沿M 平面和垂直于M 平面方向分解,则在平面M 内,m 的振动等效于一个只在重力αsin mg g m ='作用下简谐运动,摆长.2360sin L LL =︒='所以周期 αππsin 2322g Lg L T =''=例10:六个相同的电阻(阻值均为R )连成一个电 阻环,六个结点依次为1、2、3、4、5和6,如图13—10 所示,现有五个完全相同的这样的电阻环,分别称为D 1、 D 2、…、D 5,现将D 1的1、3、5三点分别与D 2的2、4、 6三点用导线连接,如图13—10—甲所示,然后将D 2的 1、3、5三点分别与D 3的2、4、6三点用导线连接……依次类推,最后将D 5的1、3、5三点分别连接到D 4的2、4、6三点上,证明:全部接好后,在D 1上的1、3、两点间的等效是电阻为R 627724, 解析:由于连接电阻R 的导线,连接环D 之间的导线均不计电阻,因此,可改变环的半径,使五个环的大小满足:D 1<D 2<…<D 5.将图13—10—甲所示的圆柱形网络变成圆台形网络,在沿与底面垂直的方向将此圆台形网络压缩成一个平面,如图13—10—乙所示的平面电路图,现将圆形电阻环变成三角形,1、3、5三点为三角形的顶点,2、4、6三点为三角形三边的中点,图13—10—乙又变为如图13—10—丙所示电路图,不难发现,图13—10—丙所示的电路相对虚直线3、6具有左右对称性,可以用多种解法求,如将电路等效为图13—10—丁, A 1B 1以内的电阻R R B A 5411=A 2B 2以内的电阻R R R R R R R R B A B A B A 1914)2()2(111122=+++=A 3B 3以内的电阻R R R R R R R R B A B A B A 7152)2()2(222233=++⋅+=A 4B 4以内的电阻R R R R R R R R B A B A B A 265194)2()2(333344=++⋅+=A 5B 5以内的电阻R RR R R R R R B A B A B A 627724)2()2(444455=++⋅+=即为D 1环上1、3两点间的等效电阻,例11:如图13—11所示,用12根阻值均为r 的相同的电阻丝构成正立方体框架,试求AG 两点间的等效电阻,解析:该电路是立体电路,我们可以将该立体电路“压扁”,使其变成平面电路,如图13—11—甲所示,考虑到D 、E 、B 三点等势,C 、F 、H 三点等势,则电路图可等效为如图13—11—乙所示的电路图,所以AG 间总电阻为 r r r r R 65363=++=例12:如图13—12所示,倾角为θ的斜面上放一木 制圆制,其质量m=0.2kg,半径为r,长度L=0.1m,圆柱 上顺着轴线OO ′绕有N=10匝的线圈,线圈平面与斜面 平行,斜面处于竖直向上的匀强磁场中,磁感应强度 B=0.5T,当通入多大电流时,圆柱才不致往下滚动?解析:要准确地表达各物理量之间的关系,最好画出正视图,问题就比较容易求解了,如图13—12—甲所示,磁场力F m 对线圈的力矩为M B =NBIL ·2r ·sin θ,重力对D 点的力矩为:M G =mgsin θ,平衡时有:M B =M G 则可解得:A NBL mg I 96.12== 例13:空间由电阻丝组成的无穷网络如图13—13所示,每段电阻丝的电阻均为r,试求A 、B 间的等效电阻R AB ,解析:设想电流A 点流入,从B 点流出,由对称性可知,网络中背面那一根无限长电阻丝中各点等电势,故可撤去这根电阻丝,而把空间网络等效为图13—13—甲所示的电路,(1)其中竖直线电阻r ′分别为两个r 串联和一个r 并联后的电阻值,所以 r r r r r 3232=⋅=' 横线每根电阻仍为r,此时将立体网络变成平面网络,(2)由于此网络具有左右对称性,所以以AB 为轴对折,此时网络变为如图13—13—乙所示的网络,其中横线每根电阻为21r r =竖线每根电阻为32r r r ='='' AB 对应那根的电阻为r r 32=' 此时由左右无限大变为右边无限大, (3)设第二个网络的结点为CD,此后均有相同的网络,去掉AB 时电路为图13—13—丙所示,再设R CD =R n -1(不包含CD 所对应的竖线电阻)则N B A R R =',网络如图13—13—丁所示,此时 1111111333222------++=+⋅+⋅=+''''+=n n n n n n n R r rR r R r R r r R r R r r R当∞→n 时,R n =R n -1 ∴ 上式变为n n n n n R r rR r R r rR r R 3432++=++=由此解得:r r R n 6213+= 即r r R B A 6213+=' 补上AB 竖线对应的电阻r 32,网络变为如图13—13—戊所示的电路, r r r r r r R r R r R B A B A AB 21212)321(21)213(221321)213(262133262133232322=++=++=+++⋅=+⋅='' 例14:设在地面上方的真空室内,存在匀强电场和匀强磁场,已知电场强度和磁感应强度的方向是相同的,电场强度的大小E=4.0V/m,磁感应强度的大小B=0.15T,今有一个带负电的质点以v =20m/s 的速度在此区域内沿垂直场强方向做匀速直线运动,求此带电质点的电量与质量之比q/m 以及磁场的所有可能方向(角度可用反三角函数表),解析:因为带负电的质点做匀速直线运动,说明此质点所受的合外力为零,又因为电场强度和磁感应强度的方向相同,所以该带电质点所受的电场力和洛仑兹力的方向垂直共面,且必受重力作用,否则所受合外力不可能为零,设质点速度方向垂直纸面向里,由此该带电质点的受力图如图13—14所示,由平衡条件有有水平方向:θθsin cos Bqv Eq = ①在竖直方向:mg Bqv Eq =+θθcos sin ②解得:34tan =θ 34arctan =θ q/m=2 同理,当质点速度方向垂直纸面向外时受力情况如图13—14—甲,由平衡条件可解出θ值与上式解出的一样,只是与纸平面的夹角不同,故此带电质点的电量与质量之比为2,磁场的所有可能方向与水平方向的夹角都是 34tan 34arctan ==θθ或针对训练1.如图13—15所示,一个重1000N的物体放在倾角为30°的斜面上,物体与斜面间的摩擦系数μ为1/3,今有一个与斜面最大倾斜线成30°角的力F作用于物体上,使物体在斜面上保持静止,求力F的大小,2.斜面倾角θ=37°,斜面长为0.8m,宽为0.6m,如图13—16所示,质量为2kg的木块与斜面间的动摩擦因数为μ=0.5,在平行于斜面方向的恒力F的作用下,沿斜面对角线从A 点运动到B点(g=10m/s2,sin37°=0.6),求:(1)力F的最小值是多大?(2)力F取最小值时木块的加速度,3.质量为0.8kg的长方形木块静止在倾角为30°的斜面上,若用平行于斜面沿水平方向大小等于3N的力推物体,它仍保持静止,如图13—17所示,则木块所受摩擦力大小为,方向为,4.如图13—18,四面体框架由电阻同为R的6个电阻连接而成,试求任意两个顶点AB间的等效电阻,5.如图13—19所示三棱柱由电阻同为R的电阻线连接而成,试求AB两个顶点间的等效电阻,6.将同种材料粗细均匀的电阻丝连接成立方体的形状,如图13—20所示,每段电阻丝电阻均为r,试求:(1)AB两点间等效电阻R AG;(2)AD两点间等效电阻R AD,。
PCA降维算法详解以及代码示例
PCA降维算法详解以及代码⽰例转载地址:1. 前⾔PCA : principal component analysis ( 主成分分析)最近发现我的⼀篇关于PCA算法总结以及个⼈理解的博客的访问量⽐较⾼,刚好⽬前⼜重新学习了⼀下PCA (主成分分析)降维算法,所以打算把⽬前掌握的做个全⾯的整理总结,能够对有需要的⼈有帮助。
⾃⼰再看⾃⼰写的那个关于PCA的博客,发现还是⽐较混乱的,希望这⾥能过做好整理。
本⽂的所有总结参考了Andrew Ng的PCA教程,有兴趣的可以⾃⼰学习。
上⼀篇关于PCA 的博客:,在这篇博客中,有关于我最初在读研的时候关于PCA的认识,但是不是很系统,然后⾥⾯却给出了很多我总结的⽹络上的资料,以及根据我个⼈使⽤的经验总结的感悟,所以还是收到了很多的好评, o(∩∩)o...哈哈,谢谢各位的⽀持。
@copyright by watkins.song ^_^2. PCA的应⽤范围PCA的应⽤范围有:1. 数据压缩1.1 数据压缩或者数据降维⾸先能够减少内存或者硬盘的使⽤,如果内存不⾜或者计算的时候出现内存溢出等问题,就需要使⽤PCA获取低维度的样本特征。
1.2 其次,数据降维能够加快机器学习的速度。
2. 数据可视化在很多情况下,可能我们需要查看样本特征,但是⾼维度的特征根本⽆法观察,这个时候我们可以将样本的特征降维到2D或者3D,也就是将样本的特征维数降到2个特征或者3个特征,这样我们就可以采⽤可视化观察数据。
3. PCA原理简介3.1 基础⼊门这⾥我只给出在需要使⽤PCA的时候需要了解的最基本的PCA的原理,了解这些原理后对于正常的使⽤没有问题,如果想要深⼊了解PCA,需要学习⼀些矩阵分析的知识,更加详细的PCA算法请见wikipedia。
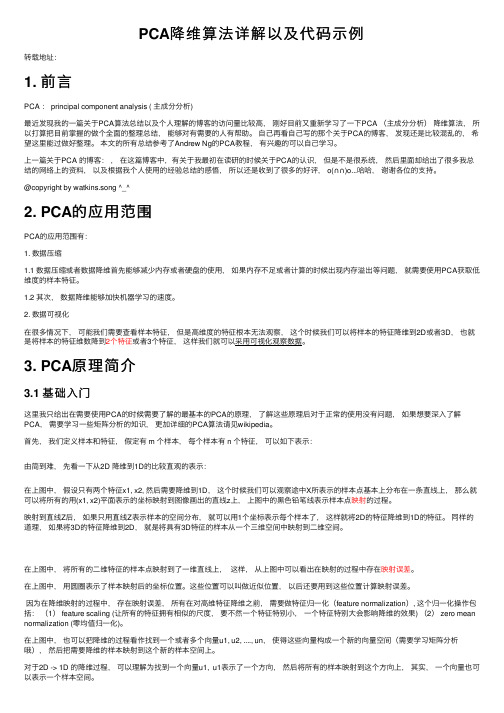
⾸先,我们定义样本和特征,假定有 m 个样本,每个样本有 n 个特征,可以如下表⽰:由简到难,先看⼀下从2D 降维到1D的⽐较直观的表⽰:在上图中,假设只有两个特征x1, x2, 然后需要降维到1D,这个时候我们可以观察途中X所表⽰的样本点基本上分布在⼀条直线上,那么就可以将所有的⽤(x1, x2)平⾯表⽰的坐标映射到图像画出的直线z上,上图中的⿊⾊铅笔线表⽰样本点映射的过程。
stOpt使用手册
1.7.1:主界面
文件游览窗口
电子表格 代码页
关键词快捷窗口
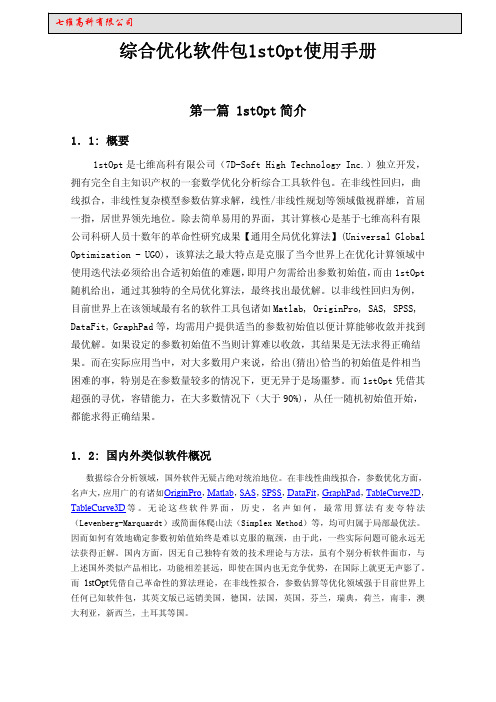
图.1 1stOpt 主画面
关键词快捷窗口由组合键“Ctrl + K”弹出,可帮助用户准确快速输入关键词。在同一代 码本中可写多个不同问题的代码,由关键词“NewDivision”来区分。可同时开启多个代码编 辑本。同一代码文件中还可加入富文本如图,表,公式等,也可把不同格式的文件添付进来。
例:两变量函数优化: Function (x+((2-x)*(2+y))^2)*sin(x*y);
定义常量
Constant
例:两变量曲线拟合: Function y = a + b*exp(c – x);
例:两变量函数优化: Function (x+((2-x)*(2+y))^2)*sin(x*y);
1
七维高科有限公司
1.3: 1stOpt 应用的优化算法
最优化算法包括: 1) Levenberg-Marquardt 法 (LM) + 通 用 全 局 优 化 算 法 (Universal Global Optimization - UGO) 2) Quasi-Newton 法 (BFGS) + 通用全局优化算法(Universal Global Optimization - UGO) 3) 遗传算法 (Genetic Algorithms - GA) 4) 摸拟退火 (Simulated Annealing - SA) 5) 下山単体法 (Simplex Method - SM) + 通用全局优化算法(Universal Global Optimization - UGO) 6) 离子群法 (Particle Swarm Optimization - PSO) 7) 最大继承法 (Max Inherit Optimization - MIO) 8) 差分进化法 (Differential Evolution - DE) 9) 自组织群移法 (Self-Organizing Migrating Algorithms - SOMA) 10) 共 扼 梯 度 法 (Conjugate-Gradient Method - CGM) + 通 用 全 局 优 化 算 法 (Universal Global Optimization - UGO) 11) 包维尔法 (Powell Optimization - PO) + 通用全局优化算法(Universal Global Optimization - UGO) 12) 禁忌搜索法 (Tabu Search - TS) 13) 单纯线性规划法 (Simplex Linear Program)
lecture_09

Binomial equations
We introduce in this section a particular kind of polynomial equations, that have nice computational properties. A binomial system of polynomial equations is one where each equation has only two terms. We also assume that the system has only a finite number of solutions, i.e., the solution set is a finite set of points in Cn . We are interested in determining the exact number of solutions, and in efficient computational procedures for solving the system. Let’s start with an example. Consider the binomial system given by 8x2 y 3 − 1 = 0 2x3 y 2 − yx = 0. (1)
2
Newton polytopes
Many of the polynomial systems that appear in practice are far from being “generic,” but rather present a number of structural features that, when properly exploited, allow for much more efficient computational techniques. This is quite similar to the situation in numerical linear algebra, where there is a big difference in performance between algorithms that take into account the sparsity structure of a matrix and those that do not. For matrices, the standard notion of sparsity is relatively straightforward, and relates mostly to the number of nonzero coefficients. In computational algebra, however, there exists a much more refined notion of sparsity that refers not only to the number of zero coefficients of a polynomial, but also to the underlying combinatorial structure. This notion of sparsity for multivariate polynomials is usually presented in terms of the Newton polytope of a polynomial, defined below. � Definition 2. Consider a multivariate polynomial p(x1 , . . . , xn ) = α cα xα . The Newton polytope of p, denoted by New(f ), is defined as the convex hull of the set of exponents α, considered as vectors in Rn . Thus, the Newton polytope of a polynomial always has integer extreme points, given by a subset of the exponents of the polynomial. Example 3. Consider the polynomial p(x, y ) = 5 − xy − x2 y 2 + 3y 2 + x4 . Its Newton polytope New(f ), displayed in Figure 1, is the convex hull of the points (0, 0), (1, 1), (2, 2), (0, 2), (4, 0). Example 4. Consider the polynomial p(x, y ) = 1 − x2 + xy + 4y 4 . Its Newton polytope New (p) is the triangle in R2 with vertices {(0, 0), (2, 0), (0, 4)}. Newton polytopes are an essential tool when considering polynomial arithmetic because of the fol lowing fundamental identity: New(g · h) = New(g ) + New(h), where + denotes the Minkowski addition of polytopes. 92
Unsupervised learning of finite mixture models

[18], [36], [37], which converges to a maximum likelihood (ML) estimate of the mixture parameters. However, the EM algorithm for finite mixture fitting has several drawbacks: it is a local (greedy) method, thus sensitive to initialization because the likelihood function of a mixture model is not unimodal; for certain types of mixtures, it may converge to the boundary of the parameter space (where the likelihood is unbounded) leading to meaningless estimates. An important issue in mixture modeling is the selection of the number of components. The usual trade off in model order selection problems arises: With too many components, the mixture may over-fit the data, while a mixture with too few components may not be flexible enough to approximate the true underlying model. In this paper, we deal simultaneously with the above mentioned problems. We propose an inference criterion for mixture models and an algorithm to implement it which: 1) automatically selects the number of components, 2) is less sensitive to initialization than EM, and 3) avoids the boundary of the parameters space. Although most of the literature on finite mixtures focuses on mixtures of Gaussian densities, many other types of probability density functions have also been considered. The approach proposed in this paper can be applied to any type of parametric mixture model for which it is possible to write an EM algorithm. The rest of paper is organized as follows: In Section 2, we review finite mixture models and the EM algorithm; this is standard material and our purpose is to introduce the problem and define notation. In Section 3, we review previous work on the problem of learning mixtures with an unknown number of components and dealing with the drawbacks of the EM algorithm. In Section 4, we describe the proposed inference criterion, while the algorithm which implements it is presented in Section 5. Section 6 reports experimental results and Section 7 ends the paper by presenting some concluding remarks.
数据降维的方法

数据降维的方法
数据降维的方法
数据降维是指将原有维数的数据,通过某种算法,转换到更低维数的数据,以达到某种目的。
数据降维的方法有多种,下面简要介绍一下几种常用的降维方法。
1. 主成分分析法:
主成分分析法是一种不改变原始数据分布的有效数据降维方法,是一种无监督学习方法。
它的基本思想是,在维数很高的时候,将原始的高维的数据映射到一个低维的空间中,使得原始数据尽可能的保留其内在的结构,同时又降低维数。
2. 降维投影:
降维投影是把原始数据集的更高维(比如三维)映射到更低维(比如二维)的过程,在映射过程中,尽可能地保留原始数据的结构。
这种方法主要是从空间上考虑,把原始数据从多维空间映射到低维空间,使得数据之间的相关性、结构等能尽可能的保留。
3. 局部线性嵌入:
局部线性嵌入是一种有监督的特征提取算法,它有效地将原有维数较高的数据映射到低维空间中,同时又能保留原有的关联结构,主要用于非线性问题。
4. 降维编码:
降维编码是指将原始数据投影到一个更低维空间中,使用某种编码规则对原始数据进行编码,以达到降维的目的。
总之,数据降维是一种常用的方法,用来简化复杂数据的处理。
它节省了计算量和存储空间,同时又能保留原来数据的结构,十分有用。
降维算法的原理和优势是什么

降维算法的原理和优势是什么在当今这个数据爆炸的时代,我们常常面临着处理海量高维数据的挑战。
想象一下,我们手中有一个包含众多特征的数据集,就好像一个错综复杂的迷宫,让我们在其中迷失方向,难以找到有用的信息和规律。
而这时,降维算法就像一把神奇的钥匙,能够帮助我们打开这个迷宫的大门,将复杂的数据变得更加简单和易于理解。
那么,降维算法到底是什么呢?简单来说,降维算法就是一种将高维数据转换为低维数据的方法。
我们生活中的很多数据,比如图像、文本、音频等,往往具有很高的维度。
以图像为例,一张小小的彩色图片可能就有成千上万的像素点,每个像素点都包含了颜色和亮度等信息,这就构成了一个高维的数据集。
而降维算法的目的,就是要在不丢失重要信息的前提下,尽可能地减少数据的维度,让我们能够更轻松地处理和分析这些数据。
降维算法的原理可以从多个角度来理解。
其中一种常见的方法是基于特征提取。
就好比我们在一堆杂物中挑选出最有价值的物品一样,降维算法会从众多的原始特征中挑选出那些最能代表数据本质的特征。
通过某种数学方法,计算出每个特征的重要性或者相关性,然后只保留那些最重要的特征,从而达到降维的目的。
另一种常见的原理是基于数据的投影。
想象一下,我们有一个三维的空间,里面充满了数据点。
现在我们想要把这些数据点映射到一个二维的平面上,这就需要找到一个合适的投影方向,使得在这个平面上能够最大程度地保留数据点之间的关系和差异。
通过这样的投影操作,原本高维的数据就被转换为了低维的数据。
那么,降维算法有哪些具体的方法呢?主成分分析(PCA)就是其中一种非常经典和常用的方法。
PCA 的基本思想是通过线性变换,将原始数据投影到一个新的坐标系中,使得投影后的方差最大。
也就是说,它试图找到数据的主要方向,然后将数据沿着这些方向进行投影,从而实现降维。
还有一种方法叫做线性判别分析(LDA)。
与 PCA 不同的是,LDA 不仅考虑了数据的方差,还考虑了数据的类别信息。
数据降维的通俗解释
数据降维的通俗解释
数据降维是指通过某种方法将高维数据转换为低维的数据表示形式。
在现实生活中,我们经常面对的数据往往存在着很多特征变量,例如图片的像素值、文本的词频等。
这些高维数据不仅难以可视化展示,还可能导致计算问题的复杂性增加。
通俗来说,数据降维的过程就像是将一个复杂的立体模型变成一个简单的平面图。
假设你有一幅3D的艺术作品,它有高、宽、深三个维度。
但是,你可能希望将这幅作品用一张2D的图片来展示。
这时,你需要找到一个方法将原始的3D数据降低到2D的表示形式。
这样一来,你就可以更方便地对作品进行可视化展示或者进行进一步的分析。
在数据降维的过程中,通常会使用一些数学方法或者统计学原理,例如主成分分析(PCA)或者线性判别分析(LDA)。
这些方法可以通过一些数学上的变换将原始数据映射到一个低维的空间中,同时尽可能保留原始数据的信息。
这就像是通过某种方式将原始的3D作品映射到一个2D的平面上,保留了一部分作品的细节和特征。
数据降维的好处很明显,一方面,降低了数据的维度,可以提高计算的效率,减少计算的复杂性。
另一方面,数据降维还可以帮助我们更好地理解和分析数据,发现特征之间的关系,并且进行可视化展示。
所以,数据降维在很多领域中都有广泛的应用,例如图像处理、自然语言处理、推荐系统等,都离不开数据降维的技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九章 降维 9.1k近邻学习 k近邻( k-Nearest Neighbor,简称KNN)学习是一种常用的监督学习方法,其工作机制非
常简单:给定测试样本,基于某种距离度量找出训练集中与其靠近的k个训练样本,然后基于k个“邻居”的信息来进行预测。在分类任务中一般使用“投票法”,在回归任务中使用“简单平均法”。还可以基于距离使用加权平均或加权投票。 9.2 低维嵌入 最近邻学习的一个重要建设:任意测试样本附近任意小的距离范围内总能找到一个训练样本,即训练样本的采样密度足够大。然而,这个假设在现实任务中通常很难满足。在低维数空间进行采样还比较容易满足一定条件,而在维数很高时,距离计算有时都面临困难。在高维情况下出现的数据样本稀疏、距离计算困难等问题,是所有机器学习共同面临的障碍, 被称为“维数灾难”。 缓解维数灾难的一个重要途径是降维(dimension reduction),亦称“维数简约”,即通过 某种数学变换将原始高维属性空间转变为一个低维“子空间”,在这个子空间中样本的密度大幅增高,距离计算也变得容易。为什么能降维?这是因为在很多时候,人们观测或收集到的数据样本虽是高维的,但与学习任务密切相关的也许是某个低维分布,即高维空间中的一个低维嵌入。 若要求原始空间中样本之间的距离在低维空间中得以保持,即得到“多维缩放”(Multiple Dimensional Scaling,简称MDS)[Cox,2001]这样一种经典的降维方法。
假定m个样本在原始空间的距离矩阵为mmRD,其元素ijd表示样本ix与jx之间的
距离,原始空间的维数为d。目标是获得样本在d维空间的表示ddRZmd,,且任意两个样本在d维空间中的欧式距离等于原始空间中的距离,即ijjidzz。 令mmTRZZB,其中B为降维后样本的内积矩阵,jTiijzzb,有
jTijiijzzzzd2222
ijjjiibbb2 (1)
为了便于讨论,令降维后的样本Z被中心化,即01miiz。显然矩阵B的行与列之和均为零,即mjmiijbijb110。易知
jjmiijmbBtrd)(12
(2)
iimjijmbBtrd)(12
(3) )(2112Bmtrdmimjij (4)
其中,21)(miizBtr。令 mjijidmd122
.
1
(5)
miijjdmd122
.
1
(6)
mimjijdmd11222
..
1
(7)
于是由(1)和式(2)-(7)可得 )(212..2.2.2ddddbjiijij, (8)
由此即可通过降维前后保持不变的距离矩阵D求取内积矩阵B。 对矩阵B做特征值分解,TVVB,其中),,,(21ddiag为特征值构成的对
角矩阵,d21,V为特征向量矩阵。假定其中有d个非零特征值,它们构成对角矩阵),,,(21ddiag,令V表示相应的特征向量矩阵,则Z可表示为 mdZRVT2
1
。
在现实应用中为了有效降维,往往仅需要降维后的距离与原始空间中的距离尽可能接近,而不必严格等待。此时可取dd个最大特征值构成的对角矩阵来表示Z。 一般来说,欲获得低维子空间,最简单的办法是对原始高维空间进行线性变换。给定d
维空间中的样本mdmRxxxX),,,(
21
,变换后得到dd维空间中的样本
XWZT,
其中ddRW是变换矩阵,mdRZ是样本在低维空间中的表示。基于线性变化的降维方法称为线性降维方法,对W施加不同的约束形成不同的降维方法。 9.3 流形学习 流形学习(manifold learning)是一类借鉴了拓扑流形概念的降维方法,“流形”是在局部与欧式空间同胚的空间,换言之,它在局部具有欧式空间的性质,能用欧式距离来进行距离计算。这给降维方法带来了很大的启发:若低维流形嵌入到高维空间,则数据样本在高维空间的分布虽然看上去非常复杂,但在局部上仍然具有欧式空间的性质,因此,很容易地在局部建立降维映射关系,然后再设法将局部映射关系推广到全局。当维数被降至二维或三维时,能对数据进行可视化展示,因此流形学习也可被用于可视化。 9.3.1 等度量映射 等度量映射(Isometric Mapping,简称Isomap)[Tenembaum et al.2000]的基本出发点,是认为低维流形嵌入到高维空间之后,直接在高维空间中计算直线距离具有误导性。比如, S曲面上的两点的测地线距离是两点之间的本真距离,显然在高维空间中计算直线距离是不
恰当的。测地线距离不能用高维空间的直线距离计算,但能用近邻距离来近似。这时利用流形在局部上与欧式空间同胚这个性质,对每个点基于欧式距离找出其临近点,然后就能建立一个近邻连接图,图中近邻点之间存在连接,而非近邻点之间不存在连接,于是,计算两点之间测地线距离的问题,就转变为计算近邻连接图上两点之间的最短路径问题。在得到任意亮点的距离后,就可以利用MDS方法来获得样本点在低维空间中的坐标。 需要注意的是,Isomap仅得到了训练样本在低维空间的坐标,对于新样本,如何将其映射到低维空间呢?这个问题的常用解决方案,是将训练样本的高维空间坐标作为输入、低维空间坐标作为输出,训练一个回归学习器来对新样本低维空间坐标进行预测。这显然是一个权宜之计,但目前似乎并没有更好的办法。 对近邻图的构建通常有两种方法,一种是指定近邻点个数,这样得到的近邻图称为k近邻图;另一种方法是指定距离小于事先给定的阈值的点为近邻点,这样得到的近邻图称为近邻图。两种方法均有不足,例如若近邻范围指定的较大,则距离很远的点可能被误认为
是近邻,这样就出现“短路”问题;近邻范围指定的较小,则可能出现“断路”问题。 9.3.2 局部线性嵌入 与Isomap试图保持近邻样本之间的距离不同,局部线性嵌入(Locally Linear Embedding,
简称LLE)[Roweis and Saul,2000]试图保持邻域内样本之间的线性关系。假定样本点ix的坐
标能通过它的邻域样本lkjxxx,,的坐标通过线性组合而重构出来,即 lilkikjijixwxwxwx LLE算法:
给定N个输入向量DiNRxxxxO,,,,21,输出DdNiRydi,,,2,1,。 (1)寻找每个样本点的k个近邻点; (2)计算出样本点的局部重建全脂矩阵,定义误差函数
Nikjijijixwxw11)(min
其中,),,2,1(kjxij为ix的k个近邻点,11kjijw。 令iiiijkjijxwNxw~1,其中),,,(21ikiiixxxN是一个kD阶矩阵, Tikiiiwwww),,,(
21,是一个1k的矩阵。令
iiixxxX,,,是kD维矩阵。
记221)(iiikjijijiiwNxxwxw iiTiiiiiiiwNXNXwwNXwNXwT)()((22
iiSwwT
其中,)()(iTiNXNXS。 引入Lagrange乘子,)11()(TTiiiiwSwwwL
112012)(cSwSwwwLiiii
,
只要求出矩阵S的逆矩阵即可。具体解法如下: 构造一个局部协方差矩阵iQS,其值为 )()(imiTijiijmxxxxQ 于是
1)()()()()()()()()(1112111212212111112111121kkikikikiiikiiiikiiiQQQQQQQQQSwwww
考虑到11kjijw,于是得
kpkqpqikmjmiijQQw11111
)()(
kkIrrIQQQiii是是正则化参数,此时必须正则化,可能是一个奇异矩阵,实际中,单位矩阵 (3)将所有样本点映射到低维空间中,映射条件满足 2
11)(minNikjijijiywyY
和避免数据集个近邻点,为了固定的是的输出向量是其中Ykykjyxyiijii),,2,1(,
在低维坍塌到坐标原点,满足两个限制条件:单位矩阵)。ddIyyNyNiTiiNii(1,011