我国科研人员研制成功无人驾驶拖拉机
突破产业瓶颈需解决“卡脖子”技术

农业机械化是现代农业的重要标志,是实施乡村振兴战略的重要支撑。
加快攻克大型农业机械重要领域“卡脖子”技术,有效突破产业瓶颈,牢牢把握创新发展主动权,已成为一项重要的任务。
成就显著惠农政策支撑产业发展、粮食安全。
自2004年国家实施农机购置补贴政策以来,支持强度和惠及范围不断扩大,为我国提高农机化水平、发展现代农业、繁荣农村经济发挥了重要作用。
惠农措施推动了我国农业机械化和农机工业的快速发展,使我国成为世界农机制造和使用的第一大国。
目前,我国已经形成了65大类、4200多个机型品种的农机系列产品,自主品牌国内市场占有率超过90%。
当前我国农业生产进入机械化主导的新阶段,农业机械化的发展为我国粮食战略安全提供了有力支撑。
2020年,全国粮食总产量13390亿斤,比上年增加113亿斤,增长0.9%,粮食产量再创新高,连续6年保持在1.3万亿斤以上。
耕种收综合机械化率达到71%,各主要粮食作物耕种收综合机械化率均超过80%。
农业机械得到长效发展。
我国小麦、玉米、水稻、棉花等粮棉主产区均实现了全程机械化生产,大中型、中高端、复合型机具得到了广泛应用,作业质量和效率得到明显的提升。
据不完全统计,2020年,我国大中拖实现销量41.6万台,同比增长40%,其中100马力以上大型拖拉机销量达到10.1万台。
小麦收实现销量1.8万台,同比增长13.6%,其中8kg/s机型占比超过96%。
玉米收实现销量4.22万台,同比增长17.9%,其中四行机占比达到42.7%。
水稻收实现销量5.67万台,同比增长23%,其中6kg/s及以上产品占比达到51%。
产品技术得到稳步提升。
拖拉机动力换挡、CVT、智能控制、辅助/无人驾驶、智能信息定位与交互传输等新技术将得到更多的应用和发展,产业转型速度加快,中高端产品得到进一步发展。
农机企业积极响应国家排放升级的要求,满足国四及更高排放要求的动力总成、混动/纯电动等清洁能源的应用加快。
2020年中考物理试题专项训练——机械运动
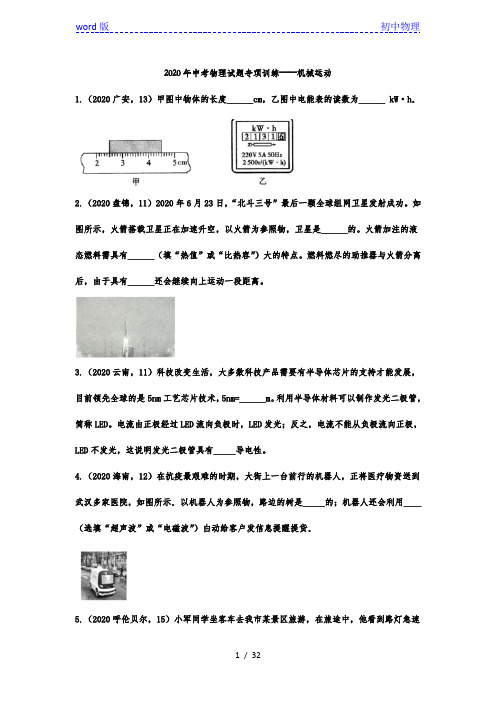
2020年中考物理试题专项训练——机械运动1.(2020广安,13)甲图中物体的长度______cm,乙图中电能表的读数为______ kW·h。2.(2020盘锦,11)2020年6月23日,“北斗三号”最后一颗全球组网卫星发射成功。
如图所示,火箭搭载卫星正在加速升空,以火箭为参照物,卫星是______的。
火箭加注的液态燃料需具有______(填“热值”或“比热容”)大的特点。
燃料燃尽的助推器与火箭分离后,由于具有______还会继续向上运动一段距离。
3.(2020云南,11)科技改变生活,大多数科技产品需要有半导体芯片的支持才能发展,目前领先全球的是5nm工艺芯片技术,5nm=______m。
利用半导体材料可以制作发光二极管,简称LED。
电流由正极经过LED流向负极时,LED发光;反之,电流不能从负极流向正极,LED不发光,这说明发光二极管具有_____导电性。
4.(2020海南,12)在抗疫最艰难的时期,大街上一台前行的机器人,正将医疗物资送到武汉多家医院,如图所示。以机器人为参照物,路边的树是_____的;机器人还会利用____(选填“超声波”或“电磁波”)白动给客户发信息提醒提货。5.(2020呼伦贝尔,15)小军同学坐客车去我市某景区旅游,在旅途中,他看到路灯急速后退,是以______为参照物的;食物串味,从分子动理论观点看,是因为食物分子______。6.(2020赤峰,11)赤峰至喀左的高铁于2020年6月30日正式运营,标志着赤峰进入高铁时代。
赤峰至喀左高铁线路全长为157km,C8228次列车上午11:09从赤峰站出发,12:12到达喀左站,列车在赤峰至喀左段运行的平均速度为_____ km/h(计算结果保留整数)。
小明乘坐高铁去旅行,当列车开动时,他觉得站台向列车运行的相反方向运动,小明是以_______为照物进行判断的。
7.(2020齐齐哈尔,16)2019年10月1日,在天安门广场举行的建国70周年国庆阅兵式中,如图所示,空中加油机正在给战机加油。
2024年新课标全国Ⅱ卷语文高考真题评讲课件

①指代词(如“它”“其”等),比对它是否有偷换概念之嫌。②范围词(如“都”“所 有”“人人”等),看它是否有任意扩大或缩小外延“将来”等),看它是否混淆偶然与必然、已然与未 然,说法绝对等。
4.混淆是非 命题者设计选项时在事物的性质上设置干扰,有意将阅读材料中肯定了的事物加以否定,或者将否定 的事物加以肯定。
5.偷换概念 命题者在解释概念或转述文意时,故意弄错对象,迷惑考生,使考生“误入歧途”。如命题者暗中将两个 概念的内涵如属性、作用、发展趋势等进行了调换、改变或混淆,乍看与原文的说法一样,但仔细推敲就会发现实 际上并不是一回事。
材料三: 从古至今,人类举头望月,传颂动人神话,谱写优美诗篇,却很少有人意识到,亿万年来,月亮
的“图案”从未变化。月球绕地球一圈的公转周期完全等于月球自转周期,所以人们只能看到它固定 朝向地球的一面,我们把月球背向地球的一面称为“月背”。2019年1月11日,在北京航天飞行控制中 心大厅里,科技人员见证了“嫦娥四号”和“玉兔二号”顺利完成“两器互拍”,这标志着“嫦娥四号”任务 取得圆满成功,3C我国成为世界上首个成功实施在月球背面软着陆并巡视探测的国家,人类开启了 探索月球背面的新纪元! 这是一次前无古人的科学探险。月背探测是中国航天的首个世界第一,它具有巨大的科学和工程意 义,是人类航天史上的重大突破。“玉兔二号”凝聚着中国航天人的勇气和智慧,像一位孤胆英雄, 面对未知的风险与挑战,勇敢进发,努力探索。得益于驾驶员团队的悉心照料与陪伴,2D“玉兔二号 ”已经创造了人类月面巡视器生存时间最长的世界纪录。“玉兔二号”探测到了冯·卡门撞击坑的地下结 构以及月球背面的最低温度等,取得了一系列科学成果,为人类揭开了月背的神秘面纱。 本书完稿之际,我国首个火星探测器“天问一号”已飞离地球,中国航天人的目光又随之投向深空。 我由衷期盼这本书能引领读者走近探月、走近航天,滋润心中科学的幼苗,点燃胸中追梦的火焰, 更希望年轻人能够沿着这一代航天人的足迹,不惧孤寂,保持好奇,去探索火星,去探索木星,不 断追逐心中的星辰大海.
无人驾驶汽车简介

无人驾驶汽车简介作者:王子正程丽来源:《时代汽车》 2016年第8期王子正程丽沈阳大学辽宁省沈阳市110044摘要:近年来随着科技的进步,无人驾驶技术也在不断提高,无人驾驶汽车能够解放操作者双手,通过计算机技术和传感技术等,使汽车变得更加便捷智能,提高交通效率。
本文通过国内外无人驾驶的发展现状引入,接着详细进一步介绍无人驾驶汽车的概念及其技术的工作原理。
无人驾驶是建立在信息感知、控制和执行等环节基础上的跨行业、跨学科的综合技术,它的核心技术为环境感知技术、高精度地图技术以及路径规划与决策技术。
最后本文介绍了国内外无人驾驶汽车的发展历程,并展望了无人驾驶未来的发展前景。
关键词:无人驾驶;环境感知技术;信息感知;发展历程;发展前景1 引言2015年12月16日,中国互联网巨头百度公司宣布,公司研发的无人驾驶汽车在北京路试成功,并成立了百度无人驾驶事业部。
2016年1月6日,在美国拉斯维加斯召开的CES消费电子展上,传统的著名汽车制造公司奥迪、宝马、大众以及创新公司FaradayFuture等发布了全新自动驾驶车型。
4月26日,谷歌、福特、Uber、Lyft以及中国吉利控股旗下沃尔沃宣布,将建立一个自动驾驶汽车联盟,以促进自动驾驶技术的推广和应用。
与此同时,谷歌为了更好地开发无人驾驶汽车,宣布与意大利菲亚特汽车公司展开合作。
近年来,奥迪、大众、奔驰等著名汽车制造公司以及谷歌、百度等著名互联网公司,都在不断涉足智能汽车领域,抢占无人驾驶技术的前沿。
无人驾驶汽车的发展,必将推动汽车行业的快速发展,也会给汽车行业带来一次重大变革。
汽车的发明给社会带来了诸多便捷和效率,汽车工业的发展也进一步促进了经济的发展与人类的创新。
人们的不断需求,也使得汽车的年产量和汽车的保有量也再增加,所以研发更加便捷安全的汽车成为重中之重。
科技的进步也带动着计算机控制技术不断进步,现在的汽车制造中越来越多的采用计算机自动控制技术,使无人驾驶技术不断趋于完善,从而提升其的效率、安全与节能。
消毒剂易使细菌产生耐药性形成“超级病菌”

一
加速器综合试验装置 ,通 过了由国防科工局 主持 的技术成果 鉴 定 。 该 回旋 加速 器 的设 计 能量 为1 Me 0 V,装 置 可加 速 负 氢 离子、剥离引出1 Me 质子束 ,内靶流强达 ̄ 4 0uA 0 V j3 。该装 置将成为我国P TJ型回旋 加速器研 制的一个新起点 :其关 EJ \ 键技术还将为完成 1 O V强流 回旋 加速器 的建造任务提供 Me O 技术保障。 据 了解 ,项 目研究得到 了国防科工局 国防基础和核能开 发 、 国家 自然科 学基 金 委 员会 国家 杰出 青年 基金 ,以及 国家 重 点工程 “ 串列加速器升级工程”试验验证等的支持。该装置 由 多峰负氯离子源、轴 向注入系统、中心区、主磁铁与主线圈、 高频谐振腔、剥离引出系统等主体设备以及配套 的高频功率 源 、 电源 与配 电 系统等 组成 。其 创 新点 包括 强磁 场聚 焦 、 变加 速间隙、谐振腔置于深谷区、结构紧凑、外部离子源、加速负 氢离子、剥离引出质子、 1 出效率高、束流强度高等。 专 家组 测试结果显示 ,内靶 束流 达到4 2 3 A,束 流在 4 OJ 态下 ,整机 通过 8 小时连续 性考 验 :E6 %高频 占空 Ot 胀 个 4 E 条件下外靶束流达N2 0 A,束流引出效率达到了10 3u 0 %。 中国原子能 科学研究 院是我 国回旋加速 器技术 的发源 地 , 1 Me J型 强 流 回旋 加 速 器 的 研 制 成 功 , 为 我 国 小 型 V/ 0 \ 回旋 加 速 器 的 批量 生 产 奠定 了基 础 。 中国原子能科学研 究院通过 1 Me / 型回旋 加速器 的 0 V] \ 研 制 ,掌 握 了具 有 自主 知识 产权 的若 干 强 流 回旋 加 速 器 核 心 技 术 。 在 强流 负氢 离 子 源理 论 和 技 术 研 究 方面 ,研 制 成 功 一 台 1 mA、 3 k V强流 负氢 离 子 源 :在 强 流 束 注 入 理 论 研 究 0 0e 方面 ,重 点 开 展 了 强流 负氢 束 在 空 间 电荷 效 应 影 响下 的 注 入 效率等研究 ,在强流 束加速理论方面 ,开展了强流 负氢束在 磁 场下的强流束流动 力学理论等研究 ;在强流束S 出技术方 1 面 ,重点开展剥离 引出系统 的结构设计等研 究,并在高频系 统理论和关键技术方面取得多项突破 性进展。 专 家 介 绍说 ,该装 置 既 是 一 台强 流 回旋 加 速 器 的综 合 技 术 试 验 台 架 ,也 可 用 于试 验 在 建 工 程 1 0 e M V回旋 加 速 器 的 0
智能农机装备的应用与发展

2021年2期智能装备与系统智慧农业导刊智能农机装备的应用与发展孟凡召(山东华宇工学院机械工程学院,山东德州253034)农业机械装备是现代农业发展的重要物质基础,是《中国制造2025》的十大重点领域之一[1]。
2018年,中央一号文件提出推进我国农机装备产业转型升级,加强科研机构、设备制造企业联合攻关,进一步提高大宗农作物机械国产化水平,加快研发经济作物、养殖业、丘陵山区农林机械,发展高端农机装备制造。
随着现代互联网技术与新农业的融合与发展,农业装备从机械化到智能化的跨越进程正在加速推进,并促进了以物联网、移动互联网、大数据和云计算等为支撑和手段的现代农业的形成。
农业部农业机械化管理司司长李伟国认为,在城市化和工业化不断加速推进的大形势下,农业劳动力的持续减少是无法避免的。
新一代适龄工人从事传统农业劳动的意愿只会下降,不会增加。
要想维持农业生产的可持续发展必须用大量农业机械装备替代高强度的人工劳动生产。
只有新型的高端自动化的智能农业机械装备应用到现代农业生产中,才能吸引并留住新型农民从事农业生产劳动。
德州市素有“九达天衢”之称,地理位置优越,位于环渤海经济圈、京津冀一体化协同发展区、山东半岛蓝色经济区和黄河三角洲高效生态经济区的交汇处。
《京津冀协同发展规划纲要》明确提出“支持山东德州建设京津冀产业承接、科技成果转化、优质农产品供应、劳动力输送基地和京津冀南部重要生态功能区”。
德州市作为山东省的主要粮食产区,粮食年产量占山东省的六分之一,畜牧业的产值占农业总产值的46%之多,能够为北京和天津地区提供充足的优质农产品[2]。
历史上,德州市还是著名的产棉基地。
作为一个农业大市,农业机械装备的应用与发展对德州市经济的发展影响巨大。
在当前国家大力扶植高端农业机械装备的背景下,智能农业机械装备将会成为农业机械装备发展的主潮流,深入开展德州市智能农业机械装备应用与发展的研究具有较大的现实意义。
1智慧农业与智能农业机械装备近年来,随着科学技术的发展,现代农业不断向智能化发展,其中智慧农业和智能农业机械装备是新的概念。
(2024年高考真题)2024年普通高等学校招生全国统一考试语文试卷 新课标Ⅱ卷
2024年普通高等学校招生全国统一考试新课标Ⅱ卷语文试卷养成良好的答题习惯,是决定成败的决定性因素之一。
做题前,要认真阅读题目要求、题干和选项,并对答案内容作出合理预测;答题时,切忌跟着感觉走,最好按照题目序号来做,不会的或存在疑问的,要做好标记,要善于发现,找到题目的题眼所在,规范答题,书写工整;答题完毕时,要认真检查,查漏补缺,纠正错误。
(一)现代文阅读I(本题共5小题,19分)阅读下面的文字,完成1~5题。
材料一:土星5号火箭升空了!它一点一点上升,庞大的身躯稳健有力.阿姆斯特朗、柯林斯和奥尔德林被巨大的推力紧紧摁在座位上。
火箭在他们身下持续上升,各级火箭按照预定程序点火,第一级火箭、逃逸塔、第二级火箭一一分离。
绕地球轨道飞行一周后,宇航员检查了火箭和飞船状况。
第三级火箭再次点火,把飞船推向更远的高空。
当地球被甩到身后,就是船箭分离的时候:第三级火箭前端打开,哥伦比亚号从顶端弹出。
鹰号(登月舱)在火箭顶端继续待命,这艘小飞船外形奇特,像一只蜷缩着的蜘蛛。
哥伦比亚号的驾驶员柯林斯,让飞船慢慢转身。
“哥伦比亚”与“鹰”对接成功。
宇航员告别土星5号的最后一级火箭,乘坐合成一体的两艘小飞船继续飞行。
终于抵达月球上空。
阿姆斯特朗和奥尔德林驾驶鹰号离开,向着月球越飞越近。
柯林斯驾驶着哥伦比亚号孤独地环绕月球飞行。
此时此刻,那些远在地球上的人,不管是朋友还是陌生人,都时刻关注着、期待着……预定着陆区在哪儿?宇航员们全力搜寻。
但是意外忽然发生:当他们发现着陆区,鹰号已经飞过了头!数英里一闪而过,舷窗外的月球变得崎岖不平。
家园远在万里之外,更无法奢望什么援手。
此时此刻,他们能做的,只有保持镇定,平稳驾驶,继续飞行。
看到了,就在不远处,那里平整而干净!鹰号慢慢减速、缓缓下降。
登月舱越来越低、越来越低……直到平稳落地!此时此刻,在遥远的地球,人们鸦雀无声、屏息聆听。
一个声音从遥远的太空传来,那是阿姆斯特朗从月球发出的声音:“这里是静海基地,‘鹰’着陆成功。
农业科技行业的智能农业装备研发与应用推广计划

农业科技行业的智能农业装备研发与应用推广计划第1章研发背景与目标 (3)1.1 农业科技发展现状分析 (3)1.2 智能农业装备市场需求 (3)1.3 研发目标与意义 (3)第2章智能农业装备技术发展趋势 (4)2.1 国内外技术发展动态 (4)2.2 技术创新方向 (4)2.3 潜在技术突破 (5)第3章关键技术研发 (5)3.1 智能感知与识别技术 (5)3.1.1 作物生长状态监测技术 (5)3.1.2 病虫害智能识别技术 (5)3.1.3 土壤参数感知技术 (6)3.2 数据处理与分析技术 (6)3.2.1 大数据分析技术 (6)3.2.2 云计算与边缘计算技术 (6)3.2.3 机器学习与深度学习算法 (6)3.3 无人驾驶与自动导航技术 (6)3.3.1 无人驾驶技术 (6)3.3.2 自动导航技术 (6)3.3.3 农业技术 (6)第4章智能农业装备产品设计与开发 (7)4.1 产品设计理念与原则 (7)4.2 产品功能模块划分 (7)4.3 产品开发流程与周期 (7)第五章智能农业装备试验与优化 (8)5.1 试验基地建设与规划 (8)5.2 产品功能测试与评价 (8)5.3 产品优化方向与策略 (9)第6章应用场景与模式摸索 (9)6.1 主要农业产业应用需求 (9)6.1.1 粮食作物生产领域 (9)6.1.2 经济作物生产领域 (9)6.1.3 畜禽养殖业 (9)6.1.4 水产养殖业 (10)6.2 典型应用场景分析 (10)6.2.1 大田作物种植 (10)6.2.2 设施农业 (10)6.2.3 畜禽养殖 (10)6.3 创新应用模式研究 (10)6.3.1 农业生产社会化服务模式 (10)6.3.2 农业产业互联网平台模式 (10)6.3.3 农业科技园区模式 (11)6.3.4 农业产业链协同创新模式 (11)第7章市场推广与营销策略 (11)7.1 市场分析与定位 (11)7.1.1 市场规模与增长趋势 (11)7.1.2 目标客户群体 (11)7.1.3 市场定位 (11)7.2 推广渠道与方式 (11)7.2.1 线上推广渠道 (11)7.2.2 线下推广渠道 (11)7.2.3 合作伙伴关系 (11)7.3 营销策略与实施 (11)7.3.1 产品策略 (12)7.3.2 价格策略 (12)7.3.3 渠道策略 (12)7.3.4 推广活动策略 (12)7.3.5 售后服务策略 (12)7.3.6 品牌建设与传播 (12)第8章政策支持与产业协同 (12)8.1 政策环境分析 (12)8.1.1 国家政策背景 (12)8.1.2 地方政策跟进 (12)8.1.3 政策发展趋势 (12)8.2 政策建议与支持措施 (13)8.2.1 政策建议 (13)8.2.2 支持措施 (13)8.3 产业协同发展路径 (13)8.3.1 产业链整合 (13)8.3.2 产业技术创新 (13)8.3.3 产业示范推广 (13)8.3.4 国际合作与交流 (13)第9章售后服务与用户培训 (13)9.1 售后服务体系建设 (13)9.1.1 服务网络布局 (14)9.1.2 售后服务团队建设 (14)9.1.3 服务流程优化 (14)9.2 用户培训方案与内容 (14)9.2.1 培训目标 (14)9.2.2 培训内容 (14)9.2.3 培训方式 (14)9.3.1 服务质量评价体系 (14)9.3.2 用户满意度调查 (14)9.3.3 持续改进 (14)第10章项目实施与效益评估 (15)10.1 项目实施计划与进度安排 (15)10.1.1 研发阶段 (15)10.1.2 推广应用阶段 (15)10.1.3 进度安排 (15)10.2 风险分析与应对措施 (15)10.2.1 技术风险 (15)10.2.2 市场风险 (15)10.2.3 政策风险 (16)10.3 效益评估与持续改进措施 (16)10.3.1 效益评估 (16)10.3.2 持续改进措施 (16)第1章研发背景与目标1.1 农业科技发展现状分析全球经济一体化和现代农业的快速发展,农业科技已成为提高农业生产效率、促进农业可持续发展的关键因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ ]奄秉 枢 , 建 明 . 品 数 据 管理 (D ) 术 i —E : 3 李 产 P M技 Ml 京 清华
大 学 出 版 社 ,0 0 20 .
+ -+ ・ + 一 + 一+ 一+ 一+ + 一 4- 一+ 一+ 一+ 一+ 一+ 一+ 一-W —卜 “— r一— 一—_ 一— - - + 十 ‘ 卜 — +~・
[ ] 瑟 夫 , 塔纳 . 造 企 业 的 产 品数 据 管 理[ . 国宁 , . 1 约 萧 制 MI 祁 译
北京 : 机械 工 业 出 版 社 , 0 0 20.
[ ]李 江 , 文 磊. 基 于 P M 的集 成 化 设 计系 统 的研 究 『1 2 孙 对 D J .
新 疆 大 学学 报 ,0 2,6) 2 — 6 2 0 ( :5 2 .
免 设计上 的重 复和 不一致 。产 品数据 版本管 理还能 保 证 产 品 开 发具 有 很 强 的 可 追 溯 性 。打瓜 机项 目
的安全 稳定 运行 。我单位 P M 的权 限管 理采 用 多 D 重权 限设 置方式 ,既可 以为单 个用户设 置 对单 个 图
文档 的不 同权 限 ,也可 以为一类 用户设 置对一 类数
善 的记录 ,保证 了机 具加工 过程 中出 现问题 时有据
可查 。 22 产品数 据管理 .
我单 位通过 产 品的具体 分类来 实现产 品数据 管
理, 由系统 管理员 添加 “ Z J 一 0 4 G T 5 0型 打瓜捡 拾脱 籽 联合 作业机 ” 这一 产 品 , 最终所 有 的零 件 、 图文档 、 技 术 文件都会 归类在 这一产 品 目录下 。 产品是 由零件 组成 的 , 而零件 在 P DM系统 中是
( 新 疆 日报 > o o o 一 3 《 > i— i0 ) 2
的, 一旦 疏 忽就会 造成 产 品信 息 的不 一致 。P M 系 D
统 通过 检 f升 版并 保存 各 历史 版本 实 现版 本 管理 , { J
பைடு நூலகம்
通 过 P M 系统 的应用 打 瓜捡 拾 脱籽 联合 作 业 D
机 在短 短两 个 月就 完成 了设 计 、 图 、N t 生产 , 制 / L 量 实 现 了 当 年立 项 当年 小 批 量 中试 ,次年 推 广 销 售 2 0余 台 , 高 效率 5 %以 上 , 省成 本 3 %以上 , 0 提 0 节 0
・
开发 研 究 ・
新疆农机化
2 1 年第 1 00 期
权 限管 理通 过控 制不 同用 户 ( 角色 ) 不 同数 据 对 对 象 的不 同访 问权限 , 证数据 的安 全与共享 、 统 保 系
解决 l这一 令企业 头疼 的问题 。 D 的实施 提 高 了 『 PM
设 计 与制造信 息 的准确性 和一 致 陛 ,使所有 参加设 计 的人 员采用 同一 数据 , 且是 最新 的数据 T作 。 而 避
我 国科 研 人 员研 制成 功 无 人 驾驶 拖 拉 机
我 国科 研 人 员在 东方 红 x一 0 8 4拖 拉 机 上 设 计 开发 了一 种 载波
相 位 差 分 全球 定位 系统 ( DGP 1 S 自动 导 航控 制 系统 , 功研 制 出 无人 成
驾 驶拖 拉 机 , 拖 拉 机 的 自动 化 和 智 能化 水 平 大 大提 高 。 使 由 华 南 农 业 大学 工程 学 院 罗锡 文 院 士 领 导 的 学 术 团 队 完成 的 这 一成 果 刊登 在 2)9 第 1 期 《 业 工程 学报 》 f 年 0 1 农 上
据对 象 的不 同权 限 。如 冈工作 需 要 添加 某 一权 限 , 应 向总_ 丁程师 提 出申请 , 准后 由 P M 系统管 理员 批 D
添加 。
20 0 8年立项 , 用 P M 系统 , 年就进 行 了小批 量 采 D 当 中试 ,但 个别 部件 在使 用过 程 中 出现 问题 ,0 9年 20 将 出现 问题 的部 分检 m进行修 改 ,修改 完的 图纸 重
新检入 时 只是 图纸 的版 本升级 ,设 计人员 在查找 图 文档 时 , 中一具 体对象 的一 个版本 , 选 一 一 之后 点击版本 比较 , 点 击该对象 的另 一个版本 , 可 以查 看该对 再 便
象 的不 同版本 。
打瓜捡拾 脱籽联 合作业机 项 目,根据 项 目合 同 书 中项 目组 人 员分T , TP M 系统 中为设计 人 员 在 iD 划 分权 限 , 目组 组长 负责机具 总体 方案设 计 、 写 项 撰
技术文件 , 目组成员负责零部件设计 、 项 制图 , 总工 程 师负责审 图 , 工艺 人 员负责 工艺设 汁 , 系统管 理 员
对 系 统 运行 进 行 实 时监 控 ,P M 系 统 的 日志管 理 D 对 系统 的运 行状态 和所有 用户 的操 作进 行 了细 致完
4 P DM 应 用 效 果
罗锡 文 院 士 领 导 的 研 究 团 队 以 东 方红 X一 0 8 4拖 拉 机 为研 究 对
象 , 农 业 机 械 导航 关 键技 术 进 行 了深 入 研 究 . 东 方红 X- 0 对 在 8 4拖 拉 机 上 设 计 开发 了 电控 液 压 转 向 系统 , 实现 了拖 拉 机 自动 转 向 操 纵
纸 审批后 , 发送 至1艺人 员 , 由T 艺人 员制作 加T丁
艺 即可交付 工厂 。如 图纸 有 问题 ,总 T程师 提 出修 改意 见返还该设 计 人员 ,设计人 员修改 完成再 重复 上一 _ 作流 程。设计 人 员也可通过 打包单 来 实现流 [ 程管理 ,即将某 …部 件图 及部件 下的零件 图一并 打 包发送 至总 1程 师 ,由总T程 师统 一审批 。打瓜 机 二 项 目组 成员 按 照这 样 的工作 流程 设计 、 图 、 制 审批 , 大 大的提 高 了工作 效率 , 减少 了图纸 中 }现 的错误 , { J 同时还减 少了打 印草 图所 产生 的资源 浪费 。
产 品数据 版本 管理也 是一 个较重 要的 问题 。手
工管理 时 ,图纸 的更 改是通 过划 改和更 改标记 实现
控制, 在此基础上 , 将拖拉 机运动学模型和转 向操 纵控制模 型相结
合 ,建 立 了拖 拉 机 直 线 跟 踪 的 导 航 控 制模 型 , 自主研 发 了 基 于 P TK— P DG S的 自动 导航 控 制 系统 , 实现 了拖 拉 机 在 田 问作 业 条 件 下的 自动 导航 和 地 头转 向控 制 , 导航 精 度 接 近 国际 先 进 水 平 。
参考文献 :
由图文档来 表示 , 零件 管理模 块 是 TP M 系统 的核 iD 心模块 , 零件对 象是 产品结 构数据组 织 的基本 元素 ,
将 TP M 系统前 端 集 成 在 Sl Wok 和 A tC iD oi rs d uo AD 中 。设计 人 员绘 制 的图纸提交 至 P M系统 , D 通过 ] 二 作 流程发 送至总T 程 师。总工程 师 收到消息 ,将 图
20 创产值 3 0 万元 。 09年 0余
通 过 P M 的实 施和 应片 , 品数 据信息 得到 了 D j产 高度共 享 , 品设计 实现 了数字 化 , 大缩短 了产 品 产 大 的开发 周 期 , 提高 了设 计 质量 , 强 企业 竞争 力 , 增 推
进 了信息 化进程 。