无人驾驶拖拉机研制成功
机器人的分类

机器人的分类经过几十年的发展,机器人的技术水平不断提高,应用范围越来越广,从早期的焊接、装配等工业应用,逐步向军事、空间、水下、农业、建筑、服务和娱乐等领域不断扩展,结构形式也多种多样。
因此,机器人的分类也出现了多种方法、多种标准,本章主要介绍以下三种分类法。
1.按照机器人的技术发展水平分按照机器人的技术发展水平可以将机器人分为三代。
第一代机器人是“示教再现”型。
这类机器人能够按照人类预先示教的轨迹、行为、顺序和速度重复作业。
示教可以由操作员“手把手”地进行,比如,操作人员抓住机器人上的喷枪,沿喷漆路线示范一遍,机器人记住了这一连串运动,工作时,自动重复这些运动,从而完成给定位置的喷漆工作。
这种方式即是所谓的“直接示教”。
但是,比较普遍的方式是通过控制面板示教。
操作人员利用控制面板上的开关或键盘来控制机器人一步一步地运动,机器人自动记录下每一步,然后重复。
目前在工业现场应用的机器人大多属于第一代。
第二代机器人具有环境感知装置,能在一定程度上适应环境的变化。
以焊接机器人为例,机器人焊接的过程一般是通过示教方式给出机器人的运动曲线,机器人携带焊枪走这个曲线,进行焊接。
这就要求工件的一致性很好,也就是说工件被焊接的位置必须十分准确。
否则,机器人走的曲线和工件上的实际焊缝位置会有偏差。
为了解决这个问题,第二代机器人采用了焊缝跟踪技术,通过传感器感知焊缝的位置,再通过反馈控制,机器人就能够自动跟踪焊缝,从而对示教的位置进行修正,即使实际焊缝相对于原始设定的位置有变化,机器人仍然可以很好地完成焊接工作。
类似的技术正越来越多地应用在机器人上。
第三代机器人称为“智能机器人”,具有发现问题,并且能自主地解决问题的能力。
作为发展目标,这类机器人具有多种传感器,不仅可以感知自身的状态,比如所处的位置、自身的故障情况等等;而且能够感知外部环境的状态,比如自动发现路况、测出协作机器的相对位置、相互作用的力等等。
更为重要的是,能够根据获得的信息,进行逻辑推理、判断决策,在变化的内部状态与变化的外部环境中,自主决定自身的行为。
基于双目视觉的智能驾驶三维场景的重建技术研究

基于双目视觉的智能驾驶三维场景的重建技术研究摘要三维重建作为计算机视觉技术中的一个重要分支,其研究一直处于火热状态,如今已在工业测量、影视娱乐、医疗科技以及文物重建等各方面得到广泛应用。
本文则主要对智能驾驶领域的双目视觉三维场景重建技术进行研究。
首先对针孔相机以及双目相机的成像原理进行讲解,介绍相机畸变产生及图像校正原理。
然后搭建双目相机三维重建系统,选取张正友标定法对相机进行标定,获取所需相机内外参数并对相机采集到的图片进行校正。
校正完成后通过立体匹配算法对图像进一步处理,获取视差图,再通过重投影矩阵由视差图计算出三维点坐标并重建三维点云模型。
最后对实验结果进行分析,总结实验结果及存在的不足。
关键词:双目视觉;相机标定;立体匹配;三维重建Research on 3D Reconstruction of Intelligent DrivingBased on Binocular VisionAbstractAs an important branch of computer vision technology, three-dimensional reconstruction has been in a hot state. Now it has been widely used in industrial measurement, studio entertainment, medical technology and cultural relic reconstruction. This paper mainly studies the 3D reconstruction technology based on binocular vision in the field of intelligent driving.Firstly, the paper explains the image-forming principle of pinhole camera and binocular camera, and introduces the generation of camera distortion and the principle of image correction. Secondly, a binocular camera 3D reconstruction system is built. Zhang Zhengyou calibration method is selected to calibrate the camera, required camera internal and external parameters are obtained and images collected by the camera are corrected. After the correction, stereo matching algorithm is used to further process the image to obtain the parallax map. 3D point coordinates is calculated via parallax map through the reprojection matrix and 3D point cloud model is reconstructed. Finally, the experimental results are analyzed, and the results and shortcomings are summarized.Keywords:Binocular Vision;Camera Calibration;Stereo Matching;3D Reconstruction目录第1章绪论............................................................................................. 错误!未定义书签。
2020年中考物理试题专项训练——机械运动
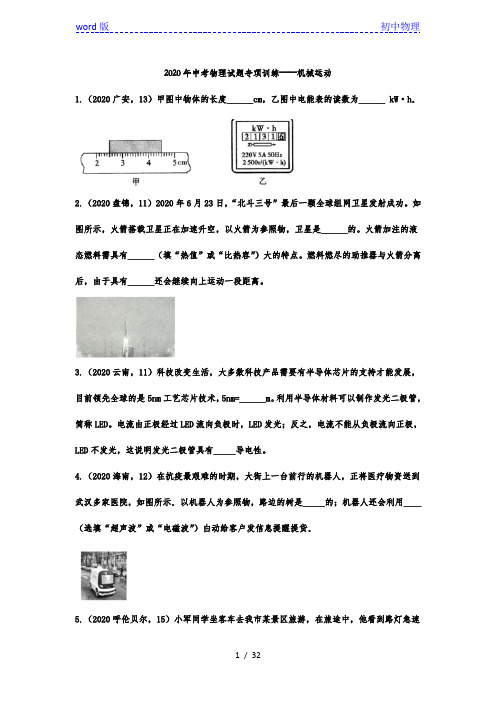
2020年中考物理试题专项训练——机械运动1.(2020广安,13)甲图中物体的长度______cm,乙图中电能表的读数为______ kW·h。2.(2020盘锦,11)2020年6月23日,“北斗三号”最后一颗全球组网卫星发射成功。
如图所示,火箭搭载卫星正在加速升空,以火箭为参照物,卫星是______的。
火箭加注的液态燃料需具有______(填“热值”或“比热容”)大的特点。
燃料燃尽的助推器与火箭分离后,由于具有______还会继续向上运动一段距离。
3.(2020云南,11)科技改变生活,大多数科技产品需要有半导体芯片的支持才能发展,目前领先全球的是5nm工艺芯片技术,5nm=______m。
利用半导体材料可以制作发光二极管,简称LED。
电流由正极经过LED流向负极时,LED发光;反之,电流不能从负极流向正极,LED不发光,这说明发光二极管具有_____导电性。
4.(2020海南,12)在抗疫最艰难的时期,大街上一台前行的机器人,正将医疗物资送到武汉多家医院,如图所示。以机器人为参照物,路边的树是_____的;机器人还会利用____(选填“超声波”或“电磁波”)白动给客户发信息提醒提货。5.(2020呼伦贝尔,15)小军同学坐客车去我市某景区旅游,在旅途中,他看到路灯急速后退,是以______为参照物的;食物串味,从分子动理论观点看,是因为食物分子______。6.(2020赤峰,11)赤峰至喀左的高铁于2020年6月30日正式运营,标志着赤峰进入高铁时代。
赤峰至喀左高铁线路全长为157km,C8228次列车上午11:09从赤峰站出发,12:12到达喀左站,列车在赤峰至喀左段运行的平均速度为_____ km/h(计算结果保留整数)。
小明乘坐高铁去旅行,当列车开动时,他觉得站台向列车运行的相反方向运动,小明是以_______为照物进行判断的。
7.(2020齐齐哈尔,16)2019年10月1日,在天安门广场举行的建国70周年国庆阅兵式中,如图所示,空中加油机正在给战机加油。
无人驾驶技术

无人驾驶技术无人驾驶技术是指通过先进的计算机系统和传感器技术,实现车辆在没有人类驾驶者的情况下自动行驶的技术。
这项技术在过去几年里取得了长足的进步,并且吸引了全球范围内的广泛关注。
本文将探讨无人驾驶技术的现状、应用领域以及未来发展前景。
一、无人驾驶技术的现状无人驾驶技术的发展离不开人工智能和计算机视觉等相关技术的进步。
当前,已经有一些汽车制造商和科技公司投入了大量资源来研发无人驾驶技术,如谷歌的Waymo、特斯拉、Uber等。
这些公司通过不断地测试和改进,使得无人驾驶汽车在公共道路上行驶成为可能。
目前,无人驾驶技术可以分为几个阶段。
首先是自动辅助驾驶技术,也就是使用传感器和软件来辅助驾驶员进行驾驶操作。
这一阶段的技术已经广泛应用于现有的汽车上,如自动刹车、自动泊车等功能。
其次是高级驾驶辅助系统(ADAS),这些系统可以自动调整车速、跟踪前方车辆并保持车道。
最后是完全自动驾驶技术,这种技术下车辆完全不需要人类驾驶员的干预就能够安全行驶。
二、无人驾驶技术的应用领域无人驾驶技术的应用领域广泛,涵盖了交通运输、物流、农业等多个领域。
在交通运输领域,无人驾驶技术使得车辆能够自主驾驶,提高了行车安全性,减少了交通事故的发生。
另外,无人驾驶技术还可以提高交通流量的效率,减少交通拥堵。
在物流领域,无人驾驶技术可以应用于货物配送和仓储管理等环节。
通过自动驾驶的无人车辆,物流公司可以实现24小时连续运输服务,提高效率并节省人力成本。
在农业领域,无人驾驶技术可以应用到农用机械上。
例如,农民可以利用无人驾驶拖拉机进行农田的耕作,提高农业生产效率和收成质量。
三、无人驾驶技术的未来发展前景无人驾驶技术的未来发展前景非常广阔。
随着技术的不断进步,无人驾驶车辆将会变得更加安全可靠。
通过高精度地图和感知设备,车辆可以准确地感知周围环境并做出相应的驾驶决策,与其他车辆和行人保持良好的协调。
此外,随着无人驾驶车辆的普及,交通规则和法律制度也需要相应地进行调整和更新,以确保道路安全和车辆之间的互动顺畅。
拖拉机的知识点
拖拉机的知识点一、知识概述《拖拉机》①基本定义:拖拉机呢,就是一种农用机械,主要由发动机、底盘和电气设备这些部分组成,它可以用来牵引和操作各种农具,像耕地用的犁、播种用的播种机啥的,就像一个力气很大的铁牛,在农田里干活最拿手了。
②重要程度:在农业领域那可是相当重要的角色。
它能大大提高农业生产的效率,让农民伯伯们干起农活轻松不少,毫不夸张地说,它可是现代农业中必不可少的帮手。
③前置知识:你得知道一些简单的机械原理,比如什么是轮轴,还有发动机工作的基本原理大概得了解一点,像发动机烧油然后产生动力推动机器动起来这种基本概念。
④应用价值:在实际生活中,它广泛应用于农田耕作、货物运输(在农村田间地头运输农产品或者农具)、农业开垦等场景,要是没有拖拉机,有些大面积的农田光靠人力和畜力,不知道要干到什么时候呢。
二、知识体系①知识图谱:在农业机械这个大范畴里,拖拉机属于主要用于耕种作业和短途运输类机械,和收割机之类是并行的不同类别的农用机械。
②关联知识:和发动机知识有密切联系,因为发动机是它的动力源;还有和农业机械操作相关的知识,比如不同农具与拖拉机连接要匹配啥的;再就是机械维修知识,拖拉机出故障可需要知道怎么修呢。
③重难点分析:- 掌握难度:对于新手来说,拖拉机的操作部分需要一些时间来掌握,比如换挡、控制农具的升降等这些操作不是一下子就能熟练的。
- 关键点:首先了解它的动力系统是重点,因为这关系到它能不能正常干活。
另外,安全操作也是非常关键的,拖拉机万一失控是很危险的。
④考点分析(如果在相关课程中有考试的话):- 在考试中的重要性:如果有农业机械类的课程考试,拖拉机相关的内容会占不少比例,因为它很有代表性。
- 考查方式:可能会考查拖拉机的构造组成、基本操作、故障排除等方面的知识,有选择题问你某个部件是干啥用的,或者简答题让你简述操作步骤等。
三、详细讲解【实践应用类】①准备工作:- 需要的工具和材料:首先当然是要有拖拉机本身啦。
高新技术在农业的应用

高新技术在农业的应用高新技术在农业的应用专家预言,农业高技术设备将在世界各国普及.未来农业将向高技术发展。
以下介绍一些目前高新农业技术。
无线遥控拖拉机技术多年以来,国外的先进农机技术中,遥控技术已得到了充分的应用。
如美国已经可以通过电脑、卫星控制野外拖拉机作业;日本成功开发的无人驾驶插秧机,插秧偏差仅2~3厘米。
微生物替代化肥新技术日本千叶大学成功开发出一种新技术,利用微生物促使植物生长。
这一技术可控制因大量使用化肥造成的土壤污染,对沙漠绿化也有一定作用。
这种新技术利用的材料是从空气中吸收氮的固菌及由其产生的多糖类物质。
研究人员通过试管作实验,水稻发芽后,在根部把固氮菌和PM(百万分之一)多糖类放在一起。
使吸收力比平常增加6倍,水稻的绿叶量增长10~20高度增加2~4倍。
此项用微生物肥料代替技术,很有现实意义。
太阳能技术日本前不久研制出一种太阳能农用拖拉机,它有三大优点:节省能源和人力、没有污染以及操作简便。
这种拖拉机很像加长的手扶拖拉机,拖拉机上架着一面太阳能发电蓄电板。
该板长3.6米,宽2.4米,如果接受太阳光充电6个小日寸,就可供拖拉机行驶9至10个小时。
这种太阳能拖拉机可用于田间管理,譬如给农田除草、间苗以及收获等。
机器人技术机器人技术在农业领域里的应用已经相当广泛。
集装箱农用机器人以色列最近研制出种植庄稼的集装箱,每个长12米,宽2.5米,可以种植500颗莴苣,其产量是同等面积土地用传统方法种植产量的若干倍。
由于集装箱完全封闭,与外界环境隔绝,庄稼不会受到害虫八侵和污染,因而种植过程中无需施用农药。
为适应集装箱种植,以色列研制出一种农用机器人。
这种会种庄稼的机器人名为“种植技术2000”。
可以在集装箱内,种植蔬菜和其他各种庄稼。
可以全程对庄稼的生长过程实行自动监控,每个集装箱从播种、浇水到收割都由机器人完成。
护渔场的机器人美国最近发明了一种可以看护养渔场的机器人。
春耕在即
春耕在即,中国一拖振兴乡村在行动作者:陶建华来源:《农机市场》 2019年第3期全国“两会”期间,“乡村振兴”毫无意外再度成为时政热点。
恰逢春耕在即,中国一拖为全国农民准备了春耕机械化成套解决方案,以实际行动助力乡村振兴。
3 月9 日至11 日,2019 全国农业机械及零部件展览会在郑州国际会展中心开幕。
此次展会上,作为农机制造领域的领军企业和行业风向标,中国一拖重点针对即将开始的春耕作业,展示其为用户提供的成套装备解决方案。
在农机行业深度调整的大背景下,中国一拖仍然重装亮相今年的春季全国农机展。
配装东方红机具的东方红大轮拖、东方红中轮拖、市场热度极高的东方红收获机、具有前瞻性的东方红柴油机悉数亮相。
同时,两台东方红无人驾驶拖拉机,还在展会现场进行动态障碍物避让、移动避障等实操演示。
现场观众还有机会坐进驾驶室,亲身体验农机“无人驾驶”的乐趣。
此次参展的东方红拖拉机产品,覆盖60 马力到200 马力,是根据不同地区春耕作业需要精选的产品,可分别满足水田、旱田及果园的旋耕、犁耕、耙平、深松、播种、施肥、喷药、开沟、覆膜、运输等各种作业需要,及玉米、水稻、小麦、大豆等多种作物的收获作业需要。
展会上,中国一拖还展示了具有前瞻性的“农机芯”,由中国一拖与德国博世联合开发的4款东方红柴油机,作为满足国四排放标准的新一代高压共轨动力平台,该产品将让农机作业更节能、更高效。
近年来,中国一拖致力于推进新一代动力换挡产品国产化,和国四、国五柴油机的研发及商品化进程。
东方红400 马力无级变速拖拉机、东方红无人驾驶拖拉机、国内首款无驾驶室纯电动拖拉机等具备国际先进水平的新产品相继公开亮相,并引起社会广泛关注。
2018 年,智能驾驶室数字化工厂、柴油机智能制造装配线、新型轮拖智能制造新模式应用等项目相继建成投产,中国一拖还在行业内率先做出拖拉机、收获机产品“6 小时到位”“12小时修复”的服务承诺。
2 月28 日,世界三大农机展之一的SIMA 法国国际农机展刚刚闭幕,中国一拖法国公司在展会上推出新品牌Mancel 产品首次亮相,引发欧洲农机行业媒体热议。
2021年农业农村领域重点研发项目申报指南
2021年农业农村领域重点研发项目申报指南2021年农业农村领域重点研发项目申报指南一、丘陵山区智能农机装备技术创新项目一:山地拖拉机无人驾驶系统研发与应用1.研究内容:针对丘陵山区农业机械作业需求,研发基于北斗导航的位置信息接收和地块信息测量装置,开发一套适应丘陵山区不规则地块作业路径规划的无人驾驶系统,实现对山地拖拉机的精准控制,在重庆地产拖拉机上集成应用。
2.考核指标:研发山地拖拉机无人驾驶系统1套,具有CAN或485总线接口,支持5G通信和NTRIP协议,平均故障间隔时间≥800小时;在2~3种重庆地产拖拉机上集成应用50套,不规则地块的边界识别误差≤5厘米,田间水平定位精度达到10厘米,高程定位精度达到20厘米,通过有资质的第三方鉴定。
制定通信协议团体标准1项,申请软件著作权2项、发明专利1件。
3.实施年限:3年。
4.支持方式:拟支持1项,财政经费资助不超过200万元。
项目二:小型山地农业机械远程控制系统研发与应用1.研究内容:针对丘陵山区微耕机、田园管理机、植保机械等农业机械操作强度大,振动、噪声大问题,开展抗干扰、无线遥控关键技术研究,研发中小型山地农业机械通用远程控制系统,实现行走和作业的远程控制,具备超视距工作状态监控,实现机具姿态参数反馈。
2.考核指标:研发小型山地农机远程控制系统1套,适应自带ECU 或不带ECU,紧急停车响应时间≤50ms,无障碍遥控距离大于200米,平均故障间隔时间≥800小时;在2~3种重庆地产小型农业机械上集成应用50套,通过有资质的第三方鉴定。
制定通信协议团体标准1项,申请软件著作权1项、发明专利1件。
3.实施年限:3年。
4.支持方式:拟支持1项,财政经费资助不超过100万元。
项目三:丘陵山区轻型履带通用动力平台研发与应用1.研究内容:针对丘陵山区以微耕机为代表的小型耕作机械功能单一、劳动强度大、作业效率低,传统履带拖拉机水田作业易下陷等问题,开展履带拖拉机小型化轻量化技术、总线技术、转向防碾压技术、水田驱动防滑技术、坡地防倾翻技术研究,开发适应丘陵山区适度规模生产的水旱通用轻型履带动力平台。