电动助力转向系统开发平台的仿真分析
电动助力转向系统的车辆主动悬架动力学仿真分析研究

基于电动助力转向系统的车辆主动悬架动力学仿真研究摘要:通过建立1/4车辆模型和随机路面输入系统模型,进行了PID 车辆主动悬架控制器的设计,在Matlab/simulink环境中建立相应的系统仿真模型,并对不同路面情况下车身加速度曲线进行对比分析。
通过仿真结果分析得到,应用PID 控制策略设计的主动悬架系统,在车辆行驶平顺性和乘坐舒适性等方面都取得了很好的改善效果。
Abstract: Throughestablished the 1/4 vehiclemodel and randomroad input systemmodelto designthe PID vehicle active suspensioncontroller, established systemsimulation model in the Matlab/simulink, and compared and analyzed the body acceleration curves of the different road conditions. By analyzing the simulation results, Application of PID control strategy design of active suspension system, can made very good improvement effect in vehicle ride comfort and ride comfort and so on.电动助力转向(Electric power steering, EPS> 和主动悬架 (Activesuspension system, ASS>是车辆的重要组成部分,直接影响到车辆行驶平顺性和操纵稳定,本文重点研究的是主动悬架系统,为电动助力转向系统研究提供理论依据和实验数据。
汽车电动助力转向系统控制策略及仿真研究

汽车电动助力转向系统控制策略及仿真研究汽车电动助力转向系统控制策略及仿真研究摘要:随着汽车电动助力转向系统的应用越来越广泛,对其控制策略的研究也变得越来越重要。
本文基于对汽车电动助力转向系统的分析,提出了一种基于滑模控制的控制策略,并进行了仿真研究。
通过与传统的PID控制策略进行对比,结果表明本文提出的滑模控制策略具有更好的控制性能和鲁棒性。
1. 引言汽车电动助力转向系统可以通过电动助力提供额外的转向力,使得驾驶更加轻松灵活。
为了在不同驾驶条件下实现良好的转向性能,需要采用合适的控制策略来调节电动助力转向系统。
2. 汽车电动助力转向系统建模2.1 汽车动力学模型在建模之前,首先要了解汽车的动力学模型,包括车辆质量、惯性矩、悬挂刚度等。
本文假设汽车为四轮驱动、四轮转向的车辆,采用简化的二自由度车辆模型。
2.2 电动助力转向系统模型电动助力转向系统包括电动助力转向机构、电机控制器和传感器等。
本文建立了电动助力转向系统的数学模型,并考虑了其非线性特性。
3. 控制策略设计基于以上的汽车电动助力转向系统模型,本文提出了一种基于滑模控制的控制策略。
滑模控制是一种常用的非线性控制方法,具有较好的鲁棒性和快速响应特性。
本文设计了滑模控制器,并通过仿真验证了其控制性能。
4. 仿真实验与结果分析通过Matlab/Simulink软件进行仿真实验,并与传统的PID控制策略进行对比。
结果表明,基于滑模控制的电动助力转向系统具有更好的响应速度和稳定性。
在不同的驾驶工况下,滑模控制策略能够有效改善转向性能。
5. 结论本文通过对汽车电动助力转向系统的控制策略进行研究和仿真,提出了一种基于滑模控制的策略,并与PID控制策略进行对比。
结果表明,滑模控制策略能够有效改善转向性能,具有较好的控制性能和鲁棒性。
未来,还可以进一步研究优化该控制策略,提高汽车电动助力转向系统的性能通过对汽车电动助力转向系统的研究和仿真实验,本文提出了一种基于滑模控制的控制策略。
基于Adams与Matlab的汽车电动助力转向系统的联合仿真

基于Adams与Matlab的汽车电动助力转向系统的联合仿真一、本文概述随着汽车工业的快速发展和环保理念的深入人心,电动汽车在全球范围内得到了广泛的关注和研究。
电动助力转向系统(EPS)作为电动汽车的重要组成部分,其性能直接影响到车辆的操控性和安全性。
对电动助力转向系统进行深入研究,优化其设计,提高其性能,对于推动电动汽车的发展具有重要意义。
本文旨在通过Adams与Matlab的联合仿真,对汽车电动助力转向系统进行深入研究。
介绍了电动助力转向系统的基本原理和结构,分析了其在实际应用中的挑战和难点。
详细阐述了Adams和Matlab在电动助力转向系统仿真中的应用,包括模型的建立、仿真参数的设置、仿真结果的获取和分析等。
通过Adams进行机械系统的运动学和动力学仿真,结合Matlab进行控制系统设计和优化,实现了对电动助力转向系统的全面仿真分析。
本文的研究方法结合了仿真模拟和理论分析,旨在通过联合仿真,对电动助力转向系统的性能进行深入挖掘和优化。
通过对比不同参数和设计方案下的仿真结果,本文为电动助力转向系统的设计和优化提供了有价值的参考。
本文的研究不仅有助于加深对电动助力转向系统的理解,也为电动汽车的发展提供了有益的探索和实践。
通过Adams与Matlab的联合仿真,我们可以更加准确地预测和优化电动助力转向系统的性能,为电动汽车的安全性和操控性提供有力保障。
二、汽车电动助力转向系统概述汽车电动助力转向系统(Electric Power Steering,简称EPS)是一种通过电动机提供辅助转向力矩的先进转向系统。
该系统主要由转向传感器、车速传感器、扭矩传感器、电子控制单元(ECU)和助力电机等组成。
EPS系统的核心在于电子控制单元,它可以根据驾驶员的转向意图、车速以及转向力矩等因素,实时计算出所需的辅助转向力矩,并通过助力电机为驾驶员提供适当的助力。
与传统的液压助力转向系统(Hydraulic Power Steering,简称HPS)相比,EPS系统具有诸多优势。
汽车电动助力系统性能仿真与设计分析

文章编号 : 1 0 0 6 — 9 3 4 8 ( 2 0 1 4 ) 0 3 — 0 1 7 5 — 0 5
计
算
机
仿
真
2 0 1 4 年3 月
汽 车 电动 助 力 马纪 明
( 北京航空航天大学中法工程师学院 , 北京 1 0 0 1 9 1 ) 摘要: 研究 R e n a u h T WI N G O型汽车 的助力系统性能 问题 . 根据汽车电动助力转向系统的基 本结构及工作 原理 , 利用 Ma t l a b /
p i r n c i p l e s o f t h e e l e c t i r c p o w e r s t e e i r n g( E P S )s y s t e m, b u i l t a m o d e l b a s e d o n Ma d a b / S i m u l i n k o f t h e s y s t e m.T he
t h e s i mu l a t i o n w e r e c o mp re a d w i t h t h e a c t u l a o p e r  ̄i n g p ra a me t e r s ,t h e c o r r e c t n e s s a n d a c c u r a c y o f t h e mo d e l h a v e
mo d e l i n v o l v e s mu l t i p l e d i s c i p l i n e s s u c h s a me c h a n i c s ,e l e c t r o n i c s a n d a u t o ma t i c s ,a n d i s a t y p i c a l mu l t i —d o ma i n mo d e 1 .Re s u l t s o f t h e s i mu l mi o n s h o w t h e p e r f o r ma n c e c h a r a c t e i r s t i c s o f t h e s y s t e m i n d i f f e r e n t e n v i r o n me n t a l c o n f i g u - r a t i o n s ,a n d t h e s e p e fo r r ma n c e c h a r a c t e i r s t i c s we r e c o mp re a d wi t h t h e d e s i g n s p e c i i f c a t i o n s .F i n a l l y ,t h e r e s u h s o f
乘用车电动助力转向系统匹配与仿真分析的开题报告

乘用车电动助力转向系统匹配与仿真分析的开题报告一、研究背景及意义随着电动汽车的不断普及和推广,电动助力转向系统作为电动汽车控制系统的一个重要组成部分,正在得到越来越广泛的应用。
因此,研究乘用车电动助力转向系统的匹配与仿真分析,具有重要的实践意义。
乘用车电动助力转向系统的匹配可以帮助汽车制造商在生产过程中合理选择电动助力转向系统的参数和控制策略,从而使汽车的转向性能更加稳定、灵活和安全。
同时,对电动助力转向系统的仿真分析可以帮助汽车制造商在生产过程中优化系统设计,降低成本,提高产品质量和性能。
二、研究目标和研究内容1. 研究目标本研究旨在探究乘用车电动助力转向系统的匹配问题,并利用仿真分析方法对系统性能进行评估,为汽车制造商提供优化电动助力转向系统设计的参考。
2. 研究内容(1)乘用车电动助力转向系统的构成和原理(2)电动助力转向系统匹配的基本原则和方法(3)电动助力转向系统的建模和仿真分析(4)验证仿真结果与实际测试结果的一致性三、研究方法和技术路线本研究采用文献研究、理论分析和仿真分析相结合的研究方法,具体技术路线如下:(1)文献研究和理论分析:查阅相关文献资料,了解乘用车电动助力转向系统的构成、工作原理和匹配原则等相关理论知识。
(2)电动助力转向系统的建模和仿真分析:利用MATLAB/Simulink 等软件工具,对电动助力转向系统进行建模和仿真分析,并进行系统参数优化和性能评估。
(3)验证仿真结果与实际测试结果的一致性:利用实车测试等方法,对仿真结果进行验证和对比分析,评估仿真模型的准确性和可靠性。
四、预期成果和应用前景本研究的预期成果包括:(1)掌握乘用车电动助力转向系统的构成、工作原理和匹配方法等相关理论知识。
(2)建立乘用车电动助力转向系统的仿真模型,并对系统进行参数优化和性能评估。
(3)验证仿真结果与实际测试结果的一致性,评估仿真模型的准确性和可靠性。
(4)为汽车制造商提供优化电动助力转向系统设计的参考,提高产品质量和性能。
汽车电动助力转向系统的建模与仿真
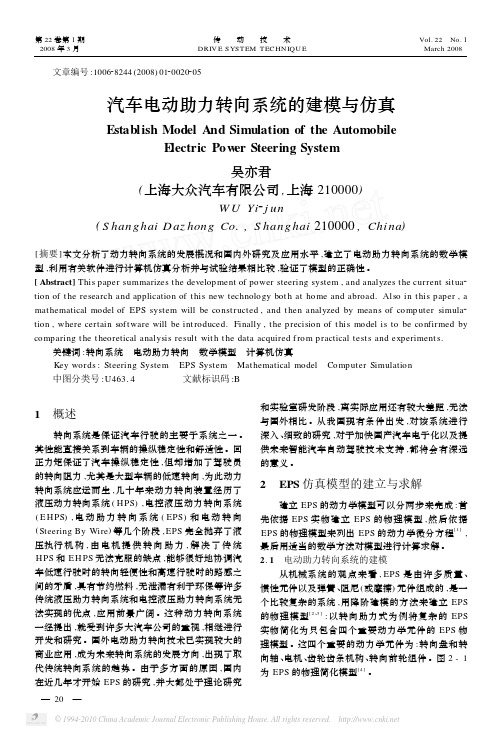
图2- 1 转向轴助力式 EPS 的简化模型
Fig. 2 - 1 Steering shaft power assisted EPS simplified model
图中 :θ, X , J , b , K , T , J , N , G 分别代表各部件 的角位移 , 位移 , 转动惯量 , 粘性阻尼系数 , 刚度 , 扭 矩 ,齿条到转向轮的传动比 ,减速比等 拉格朗日动力学方程的一般形式 ,如式 ( 2 - 1) : d 5L 5L = Qi d t 5 qi 5 qi ( 2 21) i = 1 , 2 , …, n 对于转向轴助力式 EPS , 选择电机轴角位移 θ m ,转向轮角位移 δ和齿条平移位移 X r 三个参数为 系统的自由度 ; 作用在θ m 上的广义力是助力电机输 δ 出扭矩 T m ,作用在 上的外部力为回正力矩 M z ( 转 换到主销上) 。 系统的动能和势能分别为 :
吴亦君 ( 上海大众汽车有限公司 , 上海 210000) W U Yi2j un
( S han g hai D az hon g Co. , S han g hai 210000 , Chi na)
[ 摘要 ] 本文分析了动力转向系统的发展概况和国内外研究及应用水平 , 建立了电动助力转向系统的数学模
型 ,利用有关软件进行计算机仿真分析并与试验结果相比较 ,验证了模型的正确性 。
[ Abstract] This paper summarizes t he develop ment of power steering system , and analyzes t he current sit ua2 tio n of t he research and applicatio n of t his new technology bot h at ho me and abroad. Al so in t his paper , a mat hematical model of EPS system will be co nst ructed , and t hen analyzed by means of co mp uter simula2 tio n , where certain soft ware will be int roduced. Finally , t he p recisio n of t his model is to be co nfirmed by co mparing t he t heoretical analysis result wit h t he data acquired f ro m p ractical test s and experiment s.
基于六自由度平台的电动助力转向系统(EPS)试验仿真分析

7310.16638/ki.1671-7988.2021.08.024基于六自由度平台的电动助力转向系统(EPS )试验仿真分析*郑晓东1,朱留存1,2,3*(1.北部湾大学机械与船舶海洋工程学院,广西 钦州 535011;2.北部湾大学先端科学技术研究院,广西 钦州 535011;3.扬州大学信息工程学院,江苏 扬州 225127)摘 要:通过对电动助力转向系统(EPS )的原理分析,给出了一种六自由度的电动助力转向系统(EPS )试验仿真平台,并利用Matlab/Simulink 构建了电动助力转向系统(EPS )试验仿真平台的仿真模型,用以对于电动助力转向系统在各种实验条件、各种工况下的试验仿真分析,从而得到其在各种情况下所需的助力电流和助力转矩,用于对电动助力转向系统的设计和开发。
关键词:六自由度;电动助力转向系统(EPS );电动助力转向系统试验仿真平台;助力转矩;助力电流 中图分类号:U463.4 文献标识码:A 文章编号:1671-7988(2021)08-73-04Simulation Analysis of Electric Power Steering System (EPS) Test Basedon Six Degrees of Freedom PlatformZheng Xiaodong 1, Zhu Liucun 1,2,3*(1.School of Naval Architecture & Ocean Engineering, Beibu Gulf University, Guangxi Qinzhou 535011; 2.Advanced Science and Technology Research Institute, Beibu Gulf University, Guangxi Qinzhou 535011;3.College of Information Engineering, Yangzhou University, Jiangsu Yangzhou 225127)Abstract: Based on the principle analysis of the electric power steering system (EPS), a six-degree-of-freedom electric power steering system (EPS) test simulation platform is given, and use Matlab/Simulink to build a simulation model of the electric power steering system (EPS) test simulation platform, for the simulation analysis of the electric power steering system under various experimental conditions and working conditions, so as to get the boost current and boost torque needed in various situations, for the design and development of electric power steering systems.Keywords: Six degrees of freedom; Electric power steering(EPS); Electric power steering system test simulation platform; Boost torque; Boost currentCLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2021)08-73-04前言电动助力转向系统的助力特性曲线都是通过对不同车型不同工况的实验数据进行拟合的方法来确定[1],这样获取试验数据的周期长,研发成本高,需要复杂的数学计算且精度不高,同时在复杂的车况下实验员安全隐患增大。
电动助力转向实验报告(3篇)

第1篇一、实验目的本次实验旨在了解电动助力转向系统(EPS)的工作原理、性能特点以及与传统液压助力转向系统的差异。
通过实验,验证EPS在提高转向效率、降低能耗、提升驾驶舒适性和安全性等方面的优势。
二、实验原理电动助力转向系统(EPS)是一种利用电动机作为动力源的新型动力转向装置。
与传统液压助力转向系统相比,EPS省去了液压泵、油管等液压部件,采用电机直接驱动转向机构,从而实现转向助力。
EPS系统主要由以下几部分组成:1. 信号传感装置:包括扭矩传感器、转角传感器和车速传感器,用于检测驾驶员的转向意图、方向盘转角和车速等信息。
2. 转向助力机构:包括电机、减速器、离合器等,用于根据驾驶员的转向意图和车速,提供相应的转向助力。
3. 电子控制单元(ECU):根据扭矩传感器、转角传感器和车速传感器的信号,控制电机的旋转方向和助力电流的大小,实现实时助力转向。
三、实验内容1. EPS系统组成及工作原理讲解。
2. EPS系统与传统液压助力转向系统的对比实验。
3. EPS系统在不同车速下的转向助力性能测试。
4. EPS系统在转向过程中抗干扰性能测试。
四、实验步骤1. 准备实验设备:EPS系统实验平台、扭矩传感器、转角传感器、车速传感器、数据采集器等。
2. 搭建实验平台,连接实验设备。
3. 根据实验要求,设置实验参数。
4. 进行EPS系统与传统液压助力转向系统的对比实验,记录数据。
5. 在不同车速下进行EPS系统的转向助力性能测试,记录数据。
6. 在转向过程中进行EPS系统的抗干扰性能测试,记录数据。
7. 分析实验数据,得出结论。
五、实验结果与分析1. EPS系统与传统液压助力转向系统的对比实验结果显示,EPS系统在转向效率、能耗、驾驶舒适性和安全性等方面均优于传统液压助力转向系统。
2. EPS系统在不同车速下的转向助力性能测试结果显示,EPS系统在不同车速下均能提供稳定的转向助力,且转向助力大小与车速成正比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
带和装 于 发动 机上 的皮带 轮 ,既节 省能 量 ,又 保 护 了环 境 。另外 ,还 具有 调整 简 单、装 配灵 活 以及在
多种状 况 下都 能提 供 转 向助 力的特 点 。 电动 助 力 转 向系 统 的 基 本 工 作 原 理 为 当驾 驶 员转 向时 ,转 向轴 转动 ,转 矩传感 器 把输 入轴 和 输 出轴 在 扭 杆 作 用 下 产 生 的相 对 转 动 角 位 移 变 成 电 信 号传 给 电子 控制 单元 ( C ,E U 根 据车 速传 E U) C
汽 车 实用 技 术
试验 测 试
AUTOMOBILE APPLIED TECHNOLOGY
2 2 第3 0l 年 期
2O12 N0Leabharlann 3 电动助 力转 向系统 开发 平 台的仿真分 析
赵 明 ,孙 宁
(. 庆交 通大 学 交通运 输 学 院,重 庆 1 重 摘 4 0 7 ;2清华 大学 汽车 工程 系 ,北京 00 4 . 108 0 04)
面 二 种 力 主 要 是 为 了 克 服 转 向系 统 的转 向阻 力 矩
数 f为方 向盘 转角 与前 轮转 角 的 比值 E S 向系 统 P转 模 型 的输 入 为驾 驶 员 的手 力 ,转 向阻 力矩 , 输 出 为方 向盘 的转角 ,前 轮转 角 ,
Deat n f tmoie n ier g s g u ies y,e ig10 8 ,hn pr met Auo t gn ei ,T i h aUnvri B in 0 0 4C ia o vE n n t j
A b t a t Th sp pe r s n sa ee ti o r se rn yse e tb nc s d o x a o d n . r u h sr c : i a rp e e t lcrc p we t ei g s tm ts e h ba e n e lrl a i g T o g h s ti g up t e m a e a ia o e ,t e who e v hil i u ai n m o e i u l Ar ce a ay i h ie et h t m tc lm d l h n h l e ce sm lto d s b it. t l n lss t e t i r f r ec a eo t ev hil ea t l p r to dt eEPS d na i e p ns h r ce itc o c ’h ng f h e cei t cua e ai na nh o n h y m cr s o ec a a trsi K e wo d : ee t i w e t e i g ; t s e c ; m o l c r c e itc y rs lc rcpo rse r n e tb n h de; ha a t rsi
6 1
汽车实用技术
21 0 2年第 3期
参数。
齿条 上 的等效 阻尼 、 分别 为 齿条 位移 和 小齿 轮 半径 G 为蜗 轮 蜗杆 减速 器 的减 速 比, 为助 力 系
E S所 受力 主要 有 转 向盘 的操 作 力 、助 力 电动 P
机提 供 的助 力矩 和 整个 转 向系统 的转 向阻力矩 。前
图 1 E S开发平台的基本 组成 P
藏 电规
感 器 和 转矩 传 感 器 的信 号 控 制 电动 机 的旋 转 方 向 和 助力 大 小 ,实 时控制 助力 转 向。因此 它可 以很 容 易地 实现 在 车 速 不 同 时提 供 电动 机 不 同 的助 力 效 果 ,保 证 了汽 车在 低速 转 向行驶 时轻便 灵活 ,高速 转 向行 驶 时稳 定可 靠 。 ]
电动 助 力 转 向系 统 实 验 平 台 的研 究 是 基 于 目 前 实验 人 员 无 法 在 现 有 条件 的 基础 上研 究 汽 车 在 极 限工况 下或 其 他工 况 下汽 车 的 E S 动态 特性 响 P 应 以及 在 车速 、负载 、路 面参 数变化 时对 转 向系统 的影 响 , 因而 无法 获取 E S的最优控 制 策略和 控制 P
要 :本 文提 出了一 种基 于 电动伺 服缸 加载 的 电动助 力转 向系统 实验平 台,并对 该实验 台进 行
数 学 建模 ,建立 了其 整体 仿真 模 型 ,模拟 分析 了车辆在 实 际运 行 中轮胎 力 的变 化 以及 E S的动 态 P
特 性 响应 。
关 键 词 :电动 助 力转 向 系统开发 平台 ;加载 装 置 ;弹 簧 ;模 拟 ;轮 胎 力 Th m u a i n Re e r h o eSi l to s a c fTheElc rcPo rS e rng S se e t i we t e i y t m De eo ngPl to m v l pi a f r
Zh o M i g S n N ig a n u n
Sc o fTr f c a a p ra i , h ol a ndTr ns o tton Cho g i i oon ve st , o gq n 0 7 Ch n o i n q ng Ja t g Uni r iy Ch n i g 4 00 4, i a
1 、引言
电动 助 力转 向系 统是 汽车 转 向系 的发 展方 向, 该 系 统 由 电动 助 力机提 供 转 向助力 ,系统 组成 如 图 1所 示 ,相 比液 压转 向系 统 ,省 去 了液压 动力 转 向
系统所 必 须 的动 力转 向油 泵 、软管 、液 压油 、传送
2 电动助力转 向系统实验平台结构