BS2014-B307手势和体感控制机器人
综述报告格式模板

浙江理工大学本科毕业设计(论文)文献综述报告随着机器人应用领域日益扩大,自动化水平不断提高,特别是在水下、高空及危险的作业环境中, 迫切希望能给机器人末端赋予一个类似人手的通用夹持器,以便在危险、复杂及非结构化的环境中,适应抓取任意形状的物体,完成各种复杂细微操作任务的要求,机器人多指灵巧手正是为了适应这一需要而提出的[1] 。
2 国外多指手发展历史及研究成果目前,国内和国外都有一些非常有代表性的多指灵巧手被制造出来。
国外多指手的研究始于20 世纪70 年代,其中具有代表性的早期灵巧手有: 日本“电子技术实验室”的okada灵巧手[2]。
如图1 所示,该手有3个手指, 一个手掌, 拇指有3个自由度, 另两个手指各有4个自由度。
各自由度都由电机驱动,并由钢丝和滑轮完成运动和动力的传递。
这种手的灵巧性比较好, 但由于拇指只有3个自由度, 还不是最灵巧的手。
另外, 在结构上, 各个手指细长而单薄, 难以实现较大的抓取力和操作力[3]。
图1 okada 灵巧手美国斯坦福大学研制的stanford/jpl手,也是一种非常具有代表性的多指灵巧手。
如图2 所示,这种手没有手掌,共有3个手指,每根手指有3个关节,拇指相对另两个手指而立。
手指内采用的也是腱、滑轮传动方法。
这种手的自由度较少,易于设计、制造和控制,所以,目前对这种手的研究比较多,也出现了许多与其相类似的手。
国内北航研制的多指灵巧手就是一种仿jpl手[5,6],也有3个手指,每指3个关节,外表结构也极其相似。
国防科大研制的多[4] 指手的模型[7],也是一种仿jpl的手。
这种手由于每个手指的自由度只有3个,在抓取物体时,抓取点(指尖位置)一旦确定后,其抓取姿态就唯一确定。
因此,实际上手指没有冗余关节,也就没有抓取的柔性,无法像人手一样进行灵巧的抓取和操作[5]。
图2 stanford/jpl 灵巧手图3 utah/mit 灵巧手1982年美国麻省理工学院和犹他大学联合研制了 utah/mit灵巧手[8,9] 。
机器人需求公示
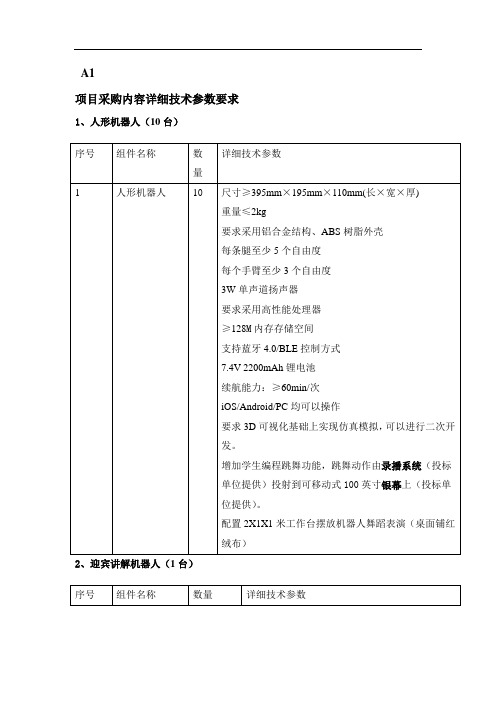
A1项目采购内容详细技术参数要求1、人形机器人(10台)2、迎宾讲解机器人(1台)3、工业机器人自动流水线工作站(1台)4、机器人科普宣传(1套)5、机器人文化展柜(1组)6、机器人文化展柜(2组)7、实训室地面、门窗、走廊处理及监控说明:该工业机器人实训室为交钥匙工程,所涉及的所有设备、附件、软件等应符合国家标准要求,绝对安全可靠,并安装调试测试服务到位,达到需方满意。
自签订合同之日起30日内完成设备安装调试。
地面处理、隔断和门改造自签订合同之日开始。
维修和服务24小时内相应。
质保期1年,寿命期内免费维护保养。
A2:工业机器人机械结构认知工作站(1台)2、工业机器人电气维修排障工作站(1台)3、工业机器人基础教学工作站(1台)4、工业机器人基础教学工作站(1台)5、工业机器人基础教学工作站(1台)重要说明:1、以上5个工作站要求各配一块关于该工作站简介、安全操作说明和实训项目不锈钢看板(按需方要求)。
2、在实训室外建4X3X2.5米铝合金气泵房。
3、免费提供6个80厘米左右高度的艺术花盆并栽上绿色假树。
6、机器人专业师资培训(免费)7、布线及实施(免费)8、工业机器人教学就业(免费)负责在校方建立烟台地区第一个校企合作工业机器人研发培训基地(负责挂铜牌),负责校方所有学习工业机器人专业并且通过技能鉴定的品学兼优学生的对口高薪实习就业工作。
郑重声明:该工业机器人实训室为交钥匙工程,所涉及的所有设备、附件、软件等应符合国家标准要求,绝对安全可靠(提供安全检验文件或证明),并安装调试测试服务到位,达到需方满意。
自签订合同之日起30日内完成设备安装调试。
维修和服务24小时内相应。
质保期1年,寿命期内免费维护保养。
A3:1、工业机器人数控加工教学工作站(1台)2、工业机器人去毛刺实训工作站(1台)3、工业机器人数控加工实训工作站(1台)4、工业机器人教学就业出口(免费)负责在校方建立烟台地区第一个校企合作工业机器人研发培训基地(负责挂铜牌并培训),负责校方所有学习工业机器人专业并且通过技能鉴定的品学兼优学生的对口高薪实习就业工作。
纳博特20.06控制系统操作手册说明书

2020控制系统操作手册20.06纳博特目录第2章安全注意事项 (15)注意事项 (15)第3章产品组装 (16)3.1示教盒安装 (16)3.2控制柜安装 (16)3.2.1线缆要求 (17)3.2.2布线要求 (18)3.2.3接地要求 (18)3.2.4接线注意事项 (19)第4章新机器人配置步骤 (20)第5章机器人的坐标系与轴操作 (26)5.1控制组与坐标系 (26)5.1.1坐标系 (26)坐标系与轴操作 (27)5.1.2关节坐标系 (27)5.1.3直角坐标系 (28)5.1.4工具坐标系 (29)5.1.5用户坐标系 (30)5.2外部轴 (33)第6章示教器按键与界面简介 (34)6.1T20示教器物理按键 (34)6.2T30示教器物理按键 (35)6.3操作系统简介 (37)6.3.1基本说明 (37)6.3.2状态介绍 (37)6.4界面介绍 (38)6.4.1主页 (38)6.4.2用户 (39)6.4.3设置 (41)6.4.4用户坐标标定 (43)6.4.5系统设置 (44)6.4.6远程程序设置 (48)6.4.11Modbus设置 (69)6.4.12后台任务 (71)6.4.13网络设置 (72)6.4.14数据上传 (73)6.4.15程序自启动 (73)6.4.16操作参数 (74)6.4.17工艺 (75)6.4.18变量 (103)6.4.19状态 (105)6.4.20工程 (107)6.4.21程序 (108)6.4.22日志 (109)6.4.23监控 (110)第7章机器人示教与运行 (111)7.1机器人准备 (111)7.1.1开机与安全确认 (111)7.1.2示教器准备 (111)7.2点动操作 (111)7.2.1示教速度调节 (112)7.2.2坐标系说明与切换 (112)7.2.3点动操作 (113)7.3程序编写 (113)7.3.1程序新建/打开/删除/重命名/复制 (113)7.3.2指令操作 (118)7.3.3指令说明(指令规范) (122)7.4程序运行 (142)7.4.1示教模式 (143)7.4.2运行模式 (143)7.4.3远程模式 (143)7.4.4从当前行运行 (145)7.5.4远程IO速度修改方式 (147)第8章工具手与用户坐标 (149)8.1工具手标定 (149)8.1.1工具坐标系 (149)8.1.2TCP:TOOL CENTER POINT,即工具中心点 (149)8.1.3工具坐标系特点 (150)8.1.4工具手参数设置 (151)8.1.57点标定 (152)8.1.612/15点标定 (156)8.1.720点标定 (161)8.1.82点标定 (162)8.2用户坐标系 (163)8.2.1用户坐标系作用 (164)8.2.2用户坐标参数设置 (165)8.2.3用户坐标系标定 (165)第9章数值变量 (167)9.1变量的名称 (167)9.2全局数值变量 (167)9.3全局数值变量使用 (169)9.3.1定义全局数值变量 (169)9.3.2通过计算指令为全局数值变量赋值 (169)9.3.3直接变量赋值 (171)9.3.4使用全局数值变量来计数 (172)9.4局部数值变量 (172)9.5局部变量使用 (173)9.5.1定义局部数值变量 (173)9.5.2使用计算指令为局部变量赋值 (174)9.5.3直接为变量赋值 (174)第10章位置变量 (175)10.1全局位置变量 (175)10.3.4READPOS 指令 (179)10.3.5USERFRAME_SET 指令 (180)10.3.6TOOLFRAME_SET 指令 (180)10.3.7COPYPOS 指令 (180)10.44轴SCARA机器人左右手 (180)10.4.1全局变量设置左右手 (181)第11章条件判断类指令的使用 (183)11.1指令说明 (183)11.1.1CALL (183)11.1.2IF (183)11.1.3ELSE (184)11.1.4ELSEIF (185)11.1.5WHILE (187)11.1.6WAIT (188)11.1.7LABEL (189)11.1.8JUMP (190)11.1.9UNTIL (191)11.1.10CRAFTLINE (192)11.1.11CMDNOTE (192)11.1.12POS_REACHABLE (192)11.1.13CLKSTART (193)11.1.14CLKSTOP (193)11.1.15CLKRESET (193)第12章后台任务 (194)12.1限制 (194)12.2注:运行模式按暂停按钮、远程模式IO暂停只暂停主程序,不暂停后台任务 (194)12.3后台任务编程 (195)12.3.1注意 (195)12.4主程序编程 (195)12.4.1PTHREAD_START(开启线程) (195)12.4.4CONTINUERUN(继续线程) (197)12.4.5STOPRUN (停止运行) (197)12.4.6RESTARTRUN(重新运行) (198)第13章IO、Modbus与远程程序 (199)13.1IO (199)13.1.1输入输出指令 (199)13.1.2I/O功能选择设置 (200)13.1.3IO状态提示设置 (201)13.1.4IO安全设置 (202)13.1.5IO复位 (202)13.1.6IO配置 (203)13.1.7使能IO (204)13.1.8报警消息 (205)13.1.9端口名称 (205)13.1.10远程模式IO预约简要说明 (206)13.2远程程序设置 (208)13.3复位点设置 (208)13.4远程功能的使用(IO) (209)13.4.1远程功能概述 (209)13.4.2远程功能使用步骤 (209)13.4.3编写程序 (209)13.4.4设置远程程序 (209)13.4.5设置IO (210)13.4.6切换到远程模式 (210)13.4.7预约排序 (210)13.4.8运行 (211)13.5Modbus修改地址码 (211)13.6Modbus的使用 (214)13.6.1ModBus功能概述 (214)13.6.2Modbus触摸屏使用流程 (214)第14章多机模式与双机协作 (218)14.1设置机器人 (218)14.2切换机器人 (219)第15章视觉工艺 (222)15.1视觉参数设置 (222)15.2视觉范围设置 (224)15.3 (225)15.4视觉位置参数 (225)15.5位置调试 (226)15.6视觉运作方式 (226)15.7视觉指令 (226)15.7.1VISION_RUN (226)15.7.2VISION_TRG (227)15.7.3VISION_POSNUM (227)15.7.4VISION_POS (227)15.7.5VISION_CLEAR (227)15.7.6VISION_END (227)15.8使用示例 (228)15.8.1抓取应用 (228)第16章传送带跟踪 (229)16.1参数设置 (229)16.1.1基本信息 (229)16.1.2识别参数 (230)16.1.3传送带标定 (230)16.1.4传感器标定 (233)16.1.5位置设置 (235)16.2编写程序 (236)16.2.1CONVEYOR_ON指令 (236)16.2.2CONVEYOR_OFF指令 (237)16.2.3CONVEYOR_CHECKPOS指令 (237)16.2.4CONVEYOR_CHECKEND指令 (237)16.3示例 (237)16.3.1使用传感器、MOVJ走轨迹 (237)16.3.2使用传感器、外部发点功能走轨迹 (238)16.3.3视觉传送带跟踪 (238)第17章外部传输点 (240)17.2通讯方式 (241)17.2.1点位存放的数据 (241)17.2.2示例 (242)17.2.3指令 (242)第18章外部通讯 (243)18.1TCP协议 (243)18.1.1参数设置 (243)18.1.2指令 (243)18.1.3READCOMM (244)18.1.4OPENMSG (245)18.1.5CLOSEMSG (245)18.1.6PRINT (245)18.1.7MSG_CONN_ST (245)第19章数据上传 (246)19.1基本设置 (246)19.2数据格式 (246)19.2.1生成csv文件示例 (247)第20章机器人日志 (249)20.1示教器日志查看 (249)日志说明 (249)操作日志:此类型日志保存用户的基本操作,例如新建程序、重命名程序插入指令等。
工业机器人技术(智能制造)产品解决方案_汇川机器人crack

IRB100-20-60Z18TS3 IRB100-20-70Z18TS3 IRB100-20-80Z42TS3
台面安装
台面安装
台面安装
600
700
800
300
400
350
300
300
450
6800mm/s
7450mm/s
9940mm/s
1010mm/s
1010mm/s
1010mm/s
1400°/s
IRB100-3-40 Z15 T S 3-00
①
②
③
④
⑤ ⑥⑦
⑧
① SCAR机器人本体
② 负载 3:3 kg 6:6 kg 20:20 kg
③ 臂长 40:400 mm 60:600 mm 70:700 mm 80:800 mm 100:1000 mm
④ Z轴长行程 15:150 mm 18:180 mm 20:200 mm 42:420 mm
用户气管2(∅6 蓝)
Ø112
20 20 130
用户气管1(∅4 蓝)
B-B
用户气管2(∅6 蓝)
用户气管3(∅6 白)
DB15
224
93.4 15X2=30
5 55±0.025 55
IRB10系列 P33~34
IRB300系列 P35~36
3-M4 12 12-M4 12
200 6+00.025 贯通(定位孔)
IRB300-3-60TS5
IRB300-7 P18
最大负载:7kg 机型覆盖:IRB300-7-70TS5
IRB300-7-70TS5
机器人核心部件
机器人控制器 P37~38
第八届毕升杯获奖名单
2013年毕昇杯获奖名单-特等奖和一等奖特等奖BS2013-B235 李悦姚瑶李超武汉工程大学邮电与信息工程学院湖北刘龙辉杨平黄明德本科3D打印机TI特等奖BS2013-B118 王琳煜林永强庄秋羽吉林大学珠海学院广东刘梦亭本科爬墙机器人一等奖BS2013-B018 李旭玲康建建青岛黄海学院山东赵振铎曾实现本科智能搬运铲车BS2013-B023 张淳奕庞红纯周润方长春师范学院吉林张志勇李春杰于繁华本科基于语音无线控制的智能机器人BS2013-B025 胡丽冰高康晨杨煜青海民族大学青海林倩王艳本科数控调速音乐彩灯控制系统的设计与实现BS2013-B029 王萌郭凯丰哈尔滨工程大学黑龙江冯尧林云本科智能语音搬运机器人BS2013-B035 李艺阳谭智勇曾稳平湖南师范大学湖南胡强邓月明本科基于单片机的远程“Waiter”BS2013-B040 徐华骏郑晓光王志龙空军航空大学吉林裘昌利徐爽本科无人遥控智能飞艇系统BS2013-B046 章锐鸿姚伟聪郑镭吉林大学珠海学院广东刘梦亭乔瑞芳本科基于物联网的智能安防兼排爆机器人BS2013-B060 韩聪张磊刘春雷黑龙江东方学院黑龙江王强赵龙尹奇龙本科无线智能水族箱BS2013-B072 郭庆荣胡杰赵德亮湘潭大学湖南胡洪波本科海边守护神BS2013-B076 宫俊徽滕健张启渤海大学辽宁张爱华张志强霍星本科智能空调机器人BS2013-B084 王建涛温宇聪黄城山东大学山东陈言俊秦峰本科Iwatch----智能健康手表BS2013-B086 孔泽郭朋赵建海北京化工大学北方学院北京靳丽张伟娟宋晓华本科水陆两栖召唤小车BS2013-B099 郭世杰苏东东闫治华山西大学工程学院山西张志恒张波王晓峰本科全自动节能教室控制系统BS2013-B107 赵盼孜刘炳全北京化工大学北方学院北京刘继超白彦霞王菊本科智能移动加湿器BS2013-B113 王洋洋姚康张妍渭南师范学院陕西袁卫本科基于MSP430单片机的彩色显示装置BS2013-B128 梁子跃任鸣宇董兴刚滨州学院山东卞丽杜玉杰本科蜘蛛侠清洁工BS2013-B143 孙琼史经伦王文涛滨州学院山东李卫兵张成亮本科多功能太阳能探测船BS2013-B149 马锐军李健吴灿峰广东工业大学广东贺春华本科智能交通路灯控制线缆防盗系统BS2013-B156 韩鹏李垚叶春龙绥化学院黑龙江李怀亮罗永辉本科森林安防报警系统BS2013-B207 朱经纬朱莫武张建军哈尔滨华德学院黑龙江佟巳刚孙立峰付洪涛本科智能大棚管理系统BS2013-B213 许武汉李琪厦门理工学院福建王晓栋本科基于双目视觉的直立行走机器人BS2013-B216 张双喜梁臣王腾龙黑龙江东方学院黑龙江韩洪涛赵龙本科基于DCS的温室种植自动化控制系统BS2013-B248 贾威陈德谦丰雨德州学院山东张福安刘汉平本科高精度智能平台BS2013-B256 徐东东柳凯李镇德州学院山东李丽欣李洪亮孙涛本科老年代步车BS2013-B257 侯贵阳王德乐李苛伟德州学院山东齐立省张福安本科贵重器件酷(库)BS2013-B260 陈曦李雪西北京信息科技大学北京彭克勤陈昕本科基于MSP430单片机的小区停车收费系统BS2013-B295 刘锋陈庭辉李兴龙黑龙江科技学院黑龙江韩龙陈义平本科基于物联网的智能立体车库BS2013-B297 陈发展黑龙江科技学院黑龙江范红刚时颖马鸣霄本科无线智能语音、体感鼠标BS2013-B300 刘甜甜李邦吴正光安徽大学安徽许先璠本科LED灯具智能检测装置BS2013-B302 琚炜洪新海王冰花安徽大学安徽许先璠本科智能语音测视仪BS2013-B308 陈添北京理工大学北京姚分喜本科基于上下位机方案的温度控制系统BS2013-G013 白一涵铁岭师范高等专科学校辽宁娄俊波李永清高职基于单片机的智能家居系统2013年毕昇杯获奖名单-二等奖二等奖BS2013-B004 谢峰粹白祖仕黄任皇中南林业科技大学涉外学院湖南向诚本科基于WIFI的视频探测车设计BS2013-B006 郭宁周旺湖南师范大学湖南邓月明胡强本科基于单片机系统的MP3播放器BS2013-B024 蔡小伟王国良吴腾北京化工大学北方学院北京刘林生李昆白彦霞本科基于AT89S51的具有过压欠压保护的电子延时电路的设计BS2013-B030 孙霁琛裴新权刘冬朝北京化工大学北方学院北京赵燕张伟娟本科基于单片机的模拟火灾报警智能小车BS2013-B033 韩炜冯晨杨赵帅帅河北大学工商学院河北张英巍赵晓军本科基于LM3S615的智能窗设计BS2013-B041 项鸿飞陈伟佳高远空军航空大学吉林张晖翟艳男本科基于地面监控系统的场地搜救系统BS2013-B048 邓立晨邓伟白冰北京化工大学北方学院北京蔡小庆刘继超史迎春本科二轮直立平衡小车BS2013-B049 许孝强蔡惠芳刘海坤集美大学福建刘晋明本科出租车计价器BS2013-B063 徐一之周利军谢昆华中科技大学文华学院湖北赵百刚卢钢江文华本科基于GSM和指纹识别的智慧家居控制系统BS2013-B074 丁浩浩王佳宁赵玉洁渤海大学辽宁张爱华霍星张志强本科智能暖气控制以及存储电能BS2013-B075 白会荣李冬冬郭鹏星渤海大学辽宁张志强张爱华霍星本科仿“人体五官”智能小车BS2013-B085 张秋旋葛一雷苗佳山东大学山东陈言俊秦峰本科健康安全智能家居控制设计BS2013-B092 周国栋申文杰吴翰山西大学工程学院山西薛太林王晓雯本科路灯节能控制系统BS2013-B093 孙晓薛飞史磊磊山西大学工程学院山西张波夏琰本科高速智能管家——黑匣子BS2013-B102 武晓威朱志斌王伟山西大学工程学院山西王晓峰张波本科 2.4G无线智能控制校园广播系统BS2013-B105 赵晗马后成天津农学院天津刘娜本科便携式室内空气质量检测仪BS2013-B112 李骞于子月陈亮中国地质大学(北京)北京张玉清杜刚本科实验室管理系统BS2013-B127 李汇城邓伟楠林巧梅广东技术师范学院广东施金鸿杨加福本科基于Cotex-M3嵌入式的智能电表BS2013-B132 冯帅李养坡晁纷纷滨州学院山东张成亮王树斌本科基于Zigbee的图书馆自习室防占座系统BS2013-B141 刘安冯帅霍鹏飞滨州学院山东王树斌袁伟本科基于wifi的水陆两栖多功能视频车BS2013-B158 金立明刘亚伦郑玉鑫绥化学院黑龙江付兴烨卢振生本科智能中药取药系统BS2013-B160 孙博李金箫吴云飞绥化学院黑龙江李怀亮白曦龙本科智能实验室BS2013-B173 苏晓丹曹志波李可心河北联合大学轻工学院河北许金钢刘亿文本科出租车定点呼叫服务系统BS2013-B175 赵亚璇池扬吴荣河北联合大学轻工学院河北许金钢邢玉秀本科合乘服务系统BS2013-B177 王智博李萌郑海波河北联合大学轻工学院河北许金钢郭慧娜本科双足步行机器人BS2013-B181 王石磊张亚男任亚楠北京化工大学北方学院北京宋晓华王菊张秋菊本科智能环保清洁小车的设计BS2013-B200 史敬亚秦昌磊马明钰哈尔滨华德学院黑龙江王朋赵建新本科基于体感控制的两轮平衡小车BS2013-B201 孙策王诗雨黄晓薇哈尔滨华德学院黑龙江赵建新王朋本科基于物联网的室内颗粒物浓度(PM2.5)检测系统BS2013-B209 何丽琴张应扬姚远北京化工大学北方学院北京李丽芬靳丽李昆本科公共停车场自动停车系统BS2013-B226 杨铮郭克威赵金旭长春理工大学光电信息学院吉林刘薇娜李春梅刘志刚本科智能循迹机器人BS2013-B231 杨冰倩任淑丽张志涛北京化工大学北方学院北京史迎春蔡小庆本科智能语音垃圾桶BS2013-B233 阮洁熊蒙湖北工业大学商贸学院湖北熊才高本科基于51单片机的LED广告屏的设计BS2013-B238 刘威孙琪胡钦瑞武汉工程大学邮电与信息工程学院湖北刘龙辉杨平黄明德本科基于电力载波的智能用电系统BS2013-B249 刘蓦周迪北京信息科技大学北京彭克勤本科基于MSP430单片机的校内消费卡系统BS2013-B251 姜晓道徐涛谷洪浩德州学院山东扈国栋张福安本科不再霉气BS2013-B254 曾铮孙永红赵学娇德州学院山东郝昕张福安本科基于LM3S615的自平衡车BS2013-B258 赵九鹏王彤彤孟繁辰长春师范学院吉林张志勇陈思本科高精度电子秤BS2013-B259 姚佳利吴奕君王靓雯长春师范学院吉林张志勇李晓宁本科水流量表BS2013-B261 李扬邓小兵张静江西师范大学江西张国平黄剑华本科智能公交车系统BS2013-B262 熊少华徐蒋斌涂瑶瑶江西师范大学江西张国平黄剑华本科基于单片机的智能家居防盗系统BS2013-B263 郭濮瑞周浩袁大龙江西师范大学江西张国平黄剑华本科智能小区楼防火防盗及灯控系统BS2013-B267 刘亚鹏樊松辰北京信息科技大学北京彭克勤本科基于MSP430单片机的学校打铃系统BS2013-B271 卜涛杰谭继东闫星宇山西大学工程学院山西张波王晓峰本科智能型客车超载监控系统BS2013-B287 粱志龙李穆徐国辉华侨大学福建杨冠鲁本科基于单片机与GSM的安全家居系统BS2013-B296 李兴龙黄祖彬陈庭辉黑龙江科技学院黑龙江陈义平韩龙本科基于语音识别的智能垃圾桶BS2013-B299 齐鹏飞张学飞黑龙江科技学院黑龙江时颖韩龙刘凯威本科智能宿舍安全监控装置BS2013-B301 陈皞朱泽基张永芳安徽大学安徽许先璠本科基于ARM的信号采集与三级处理系统BS2013-B303 卫小庆陈树赵红波安徽大学安徽许先璠本科寝室防盗报警装置BS2013-B306 鲁磊沈世明吴琼安徽大学安徽许先璠本科基于ZigBee与组态软件的温度监测系统BS2013-B307 周阳韩正云邵沈会防灾科技学院北京蔡建羡李艳芹于瑞红本科地震台隔离式智能电源的设计BS2013-G005 陈登高石玉湖北轻工职业技术学院湖北赵欣吴瑞高职四旋翼航拍飞行器BS2013-G019 杨彤宸陈蕴北京农业职业学院北京王少华曹旻罡高职远程遥控视频采集小车BS2013-S002 杨阳吉彦平刘维兵西北师范大学甘肃马胜前研究生基于LM3S811的智能无线充电器BS2013-S003 刘兴奇刘宏实李子木北京工业大学北京宋国荣研究生手势演奏器BS2013-S012 温丽丽展慕霞许淑新北方工业大学北京李小坚研究生睡眠/急救双功能呼吸机BS2013-S013 叶海冬周温州许国贤华侨大学福建杨冠鲁研究生稀土永磁发电机电压调节器BS2013-S014 黄佳乐周旭坤华侨大学福建杨冠鲁研究生混合充电储能系统2013年毕昇杯获奖名单-三等奖和参与奖三等奖BS2013-B005 李志玉曾影湖南师范大学湖南邓月明本科基于89C52单片机酷我数字音乐盒的设计BS2013-B009 李安生宋林涛陈杨北京化工大学北方学院北京陈晓芳刘伟本科“探索者”BS2013-B011 崔秩恺姜明辉崔腾蛟北京化工大学北方学院北京鲁小利赵燕本科智能水调器BS2013-B012 陈耀武林东安赵俊杰西安工程大学陕西李晓东本科基于EXP-89S51的自动行车系统BS2013-B014 吴江飞裴自刚朱丽平哈尔滨工程大学黑龙江冯尧本科第三空间智能家居系统BS2013-B016 赵俊杰青岛黄海学院山东赵振铎本科基于单片机的GSM家电远程控制系统BS2013-B017 樊志强青岛黄海学院山东赵振铎刘纪新本科大学生衣柜安全锁的设计BS2013-B019 梅徐超苏立青岛黄海学院山东赵振铎本科智能洗衣机控制系统BS2013-B021 赵俊杰青岛黄海学院山东赵振铎李丽本科基于单片机的密码锁控制及显示BS2013-B022 康建建青岛黄海学院山东杨晓磊宋娟本科数字气压计的设计BS2013-B026 彭蕾杨煜青海民族大学青海林倩王艳本科简易娱乐机器人的设计BS2013-B031 黄坤许帅马仕磊青海民族大学青海孙惠章张凌飞本科超声波智能测距系统BS2013-B032 骆尉何豪青海民族大学青海孙惠章张凌飞本科太阳能智能小车BS2013-B034 孟凡奥何豪刘晓芸青海民族大学青海孙惠章张凌飞本科智能温室大棚BS2013-B036 池销平马旺沈海乐空军航空大学吉林石静苑杨坤本科多功能减速控制系统BS2013-B037 王鸿超罗红阳李栋空军航空大学吉林汤艳坤李君本科多功能数字钟显示系统BS2013-B038 邹颖杰孔耀坤魏湧明空军航空大学吉林高玲刘晶本科机场助机智能控制系统的开发BS2013-B039 马川王子明陈家耀空军航空大学吉林李晶金美善本科边疆巡逻防御装置BS2013-B042 吴智浩欧阳东升杨鸣空军航空大学吉林和思铭宋暖本科智能运输机加油系统的研究BS2013-B044 罗云宜罗一博李洋湖北工程学院湖北马洪华本科音乐播放器设计BS2013-B045 李梓平张国山倪春龙吉林大学珠海学院广东司玉娟本科三位控制一体机器人监控排爆系统BS2013-B047 江家轩赖金明钟永聪吉林大学珠海学院广东刘梦亭乔瑞芳本科基于人机交互的开心农场BS2013-B055 张磊韩聪张寰宇黑龙江东方学院黑龙江赵龙王强王天华本科智能实验室远程无线监管系统BS2013-B056 张寰宇张松王岩黑龙江东方学院黑龙江赵龙高婷婷时培胜本科小区物业与户主智能无忧管理BS2013-B058 赵宇鹏王闯张松黑龙江东方学院黑龙江王强田崇瑞赵龙本科智能多功能盲人拐杖BS2013-B059 刘春雷赵宇鹏王岩黑龙江东方学院黑龙江蔡玉生姜斌尹奇龙本科无按键多通道奏乐电子琴BS2013-B064 梁晶谢积斌任全博中国地质大学(北京)北京杜刚本科具有语音和面部识别的迎宾机器人的开发BS2013-B066 王圣禹郑黄敏王雪梅青海民族大学青海孙惠章张凌飞本科人体生理参数采集系统设计BS2013-B067 麦永荣莫敬能罗劲贤广东工业大学广东贺春华本科潮汐车道智能调控系统BS2013-B068 胡川侯远贵聂帅湖北工程学院新技术学院湖北蔡朝王恒学本科自动化立体仓库管理系统BS2013-B070 尹桥宣许晴范浩湘潭大学湖南胡洪波姚子力本科多功能婴儿床BS2013-B073 袁青松王经宙蒋旺湘潭大学湖南胡洪波吴亚联本科高智能鱼缸BS2013-B079 何海洋余强李雅丽西北师范大学甘肃马胜前范满红本科基于单片机的手持GPS定位系统BS2013-B080 苟云涛李骞张茗奕中国地质大学(北京)北京杜刚本科人型智能健身陪练机BS2013-B081 詹志伟吴晓鹏陈晓玟广东工业大学广东贺春华本科基于51单片机的自动拾物机器车BS2013-B082 吴略林源麦永治广东工业大学广东刘俊本科平面旋转三维LED点阵BS2013-B087 杨伟宁龚海舰骆威青海民族大学青海孙惠章张凌飞本科无人值守气象站的设计与实现BS2013-B088 马健康奇豹赵银帅山东大学山东陈言俊秦峰本科铅酸电池容量自动检测报警系统BS2013-B089 杨显洁于子月中国地质大学(北京) 北京杜刚本科山地车定位及测速装置BS2013-B090 杨显洁叶志灵康维维中国地质大学(北京) 北京杜刚本科智能宿舍BS2013-B103 杨磊杨龙李海梁成都理工大学四川周冬梅本科基于头像识别、语音识别、自动报警的智能家居控制系统BS2013-B106 刘尚华郝蒙蒙丛洋哈尔滨工程大学黑龙江欧阳斌本科基于DTMF的远程医疗呼叫系统设计与实现BS2013-B110 陈研新谢昭家谢荣汉广东工业大学广东贺春华本科吊针输液自助检测系统BS2013-B111 李骞张茗奕苟云涛中国地质大学(北京)北京杜刚本科爬壁清洁机器人BS2013-B114 郑其墉陈冠任刘焕亨广东技术师范学院广东刘一本科智能快递存寄系统BS2013-B115 曾振侠肖柳芳袁桂娇广东技术师范学院广东刘一韩克本科智慧插座BS2013-B117 庄秋羽陈美靓吉林大学珠海学院广东刘梦亭乔瑞芳本科水陆两栖机勘察机器人BS2013-B119 张娜娜石丹妮侯亚辉中国地质大学(北京)北京杜刚本科无线控制智能家园系统BS2013-B120 衣岩马楠楠杨兴中国地质大学(北京)北京杜刚本科跳舞毯的扩展应用BS2013-B121 柴定宇赵大海王梦思北京化工大学北方学院北京张秋菊李丽芬本科基于ARM的疲劳驾驶监测系统BS2013-B122 高庆史恒万冬辽宁工程技术大学辽宁王巍侯利民本科基于GSM的家用消防安保BS2013-B124 王邦全张博渭南师范学院陕西苏变玲本科教学楼智能节能照明控制系统BS2013-B125 朱旭彬谢俊杰吴泽威广东工业大学广东陈先朝本科站台公交列车信息提示牌BS2013-B126 张永达曾少群黄艺新广东技术师范学院广东杨加福施金鸿本科基于AT89S51单片机的智能喂鱼器BS2013-B129 高鲁刘帅胡蒙蒙滨州学院山东齐爱学李洁本科全自动一体化粮仓BS2013-B130 王美芳王志华杨锋滨州学院山东李卫兵李洁本科芝麻开门——基于单片机的语音识别门禁系统BS2013-B134 张丰壮王富云王雪滨州学院山东高坤李卫兵本科"好帮手"智能语音识别机器人BS2013-B135 高倩玉尹文秀尉林鹏滨州学院山东丁雷齐爱学本科小区车位良化管理系统的设计BS2013-B137 张胜金冯鹏滨州学院山东石爱平李卫兵本科汽车安全驾驶控制系统BS2013-B139 高运生厉进步陈健滨州学院山东丁雷袁伟本科汽车改良安全系统BS2013-B140 胡文财惠国腾董艳艳滨州学院山东袁伟卞丽本科基于WIFI网络的无线多媒体教学系统BS2013-B142 刘浩王浩陈洪建滨州学院山东杜玉杰胡春华本科基于数字图像处理的智能小车的导航系统BS2013-B144 王山峰李长飞李肖敏滨州学院山东王忠林卞丽本科基于无线控制的塔吊控制系统BS2013-B146 赵露露李思安滨州学院山东丁雷卞丽本科基于单片机的水流量控制系统BS2013-B148 彭峰胡建刘建新湖北工程学院新技术学院湖北蔡朝余雷本科基于wifi控制的视频巡逻搜救小车BS2013-B150 赵凯李炳燃山东大学山东陈言俊秦峰本科智能四轴飞行器BS2013-B155 郭欣欣陶意明王博绥化学院黑龙江李怀亮薛玉翠本科抗低温自动育苗系统BS2013-B161 张海虹杨学良史若晨绥化学院黑龙江崔金玉李怀亮本科基于CortexM3智能安全学生公寓BS2013-B162 周德刚宋丹成吴志勇绥化学院黑龙江李怀亮王雪飞本科智能鸡舍与鸡蛋采集系统BS2013-B166 刘玉彬冉德纲郑传生滨州学院山东李卫兵张成亮本科新式自平衡双腿机器人BS2013-B168 刘立旺吴云宋晓东北京化工大学北方学院北京刘林生鲁小利本科基于单片机的智能寻迹声音定位小车BS2013-B169 罗云吴成湖北工程学院湖北肖永军本科基于Cortex-M3的城市公交站台查询系统设计BS2013-B170 高冯刘一燃孙颖湖北工程学院湖北张升义马洪华本科基于M3的空气净化器BS2013-B171 林伟杰王鸿超王大成空军航空大学吉林郑炜李井泉本科多功能智能探测车BS2013-B172 曹志林伟杰尹子斌空军航空大学吉林汤艳坤丁长虹本科基于触摸屏控制的无线探测系统BS2013-B180 马千里骆家冀李庆海哈尔滨工程大学黑龙江侯长波王伞本科基于物联网技术的工厂车间能耗监测系统BS2013-B182 刘鑫陈剑杨朝湖南师范大学湖南钱盛友本科基于89c51单片机的智能小车设计BS2013-B184 胡兵苏凯朱睿成黑龙江工程学院黑龙江宋海岩本科基于DDS原理的低频信号发生器BS2013-B186 张叁邓献策杜春燕哈尔滨工程大学黑龙江田野本科低成本双路正弦波发生器BS2013-B187 邓献策刘聪张叁哈尔滨工程大学黑龙江田野本科阵列信号发生器BS2013-B191 关明亮乔泽瑞申景峰哈尔滨华德学院黑龙江李长威宁世军本科台球自动摆球器BS2013-B197 马生辉孙雨哈尔滨华德学院黑龙江姜波郭宏本科医用点滴液速度监控系统BS2013-B202 王传胜李桐强李承涛哈尔滨华德学院黑龙江李玉龙于洪超本科智能晾衣架BS2013-B204 原野王思博王承禹哈尔滨华德学院黑龙江佟巳刚付洪涛本科智能纸张计数器BS2013-B206 周大超杨德昆尹超哈尔滨华德学院黑龙江胡金龙杜洋本科基于MSP430的手持户外仪器BS2013-B214 彭程于佳立张驰黑龙江东方学院黑龙江韩洪涛赵龙刘芳本科快件便捷签收系统BS2013-B215 陈希凤庄芸歌杨晓楠黑龙江东方学院黑龙江韩洪涛赵龙吴和静本科多功能全角度无线摇控信息发布平台BS2013-B217 李芸韵岳旭豪彭婷湖北工程学院新技术学院湖北蔡朝余雷本科智能消防小车BS2013-B221 卢琪徐达范蕊滨州学院山东张成亮王树斌本科车速辅助控制系统BS2013-B223 常新蕊付金鑫周宇超长春理工大学光电信息学院吉林刘志刚郭永峰本科智能寻迹小车BS2013-B224 董致臻周亚杰陶辰超长春理工大学光电信息学院吉林李春梅徐连香刘倩红本科电动智能小车BS2013-B227 于跃朱博曾凡起长春理工大学光电信息学院吉林张立东李秀峰本科太阳能自动寻光充电系统BS2013-B229 徐华俊吴海军邓盈盈安徽工程大学安徽李志玲本科一种基于LED照明的智能控制路灯BS2013-B232 成菲湖北工业大学商贸学院湖北熊才高刘智强本科51单片机智能小汽车BS2013-B236 林晨丁锐李梦蝶武汉工程大学邮电与信息工程学院湖北杨平黄明德本科智能清扫机器人BS2013-B237 余亮祁良辉裴君君武汉工程大学邮电与信息工程学院湖北王亮黄明德本科超市盲人导购系统BS2013-B242 方志璞熊丽萍龚苗苗武汉工程大学邮电与信息工程学院湖北黄明德来婷本科无线智能家居控制系统BS2013-B243 应亮张俊康王芬武汉工程大学邮电与信息工程学院湖北王亮来婷本科两轮自平衡小车BS2013-B244 陈栋栋刘德娟丁照坤德州学院山东潘丹张福安本科如影随形BS2013-B245 刘晓晨郑守挺孔海洋德州学院山东李丽欣董岩本科建工宝典BS2013-B246 邓智鸿胡拯豪何文思德州学院山东潘丹张福安本科智能轮椅BS2013-B247 刘衍茌冯峰狄方开德州学院山东高勇善扈国栋本科焊神BS2013-B250 陈俊杰刘琳琳张松龄德州学院山东齐立省唐荣霞本科万能裁判BS2013-B252 杨远明陈栋栋刘德娟德州学院山东齐立省唐延柯本科创新创业学习机BS2013-B253 丰雨丁璐曹明雪德州学院山东桑志国张福安本科命宝BS2013-B255 刘衍茌翟凤禄孙凯德州学院山东宋国华曲培树本科独行天下BS2013-B264 朱兵卢金伟肖修龙江西师范大学江西张国平黄剑华本科图书馆管理系统BS2013-B265 陈沁杨猛周善辉江西师范大学江西张国平黄剑华本科远程智能家电防护系统BS2013-B266 付祥朱峰熊丁丁江西师范大学江西张国平黄剑华本科外卖点餐送餐系统BS2013-B270 张明吴谋炎张腾哈尔滨工程大学黑龙江侯长波王伞本科高层火灾智能语音报警系统BS2013-B272 李岳朋陶钰李纱哈尔滨工程大学黑龙江侯长波王伞本科基于Zigbee的室内定位语音传感综合系统BS2013-B273 朱少雄白郁张文豪哈尔滨工程大学黑龙江侯长波王伞本科基于嵌入式技术的新型直流电源BS2013-B275 季乐乐黄雪丽敖鹏大庆师范学院黑龙江董雷刚崔晓微本科温室大棚智能监控系统BS2013-B276 刘江浩祁欢欢李若男大庆师范学院黑龙江董雷刚刘雅喆本科立体LED显示系统BS2013-B277 赵晶孟宪伟胡颖格大庆师范学院黑龙江董雷刚程书伟本科智能门锁BS2013-B280 田苗刘双春张贵阳长春理工大学吉林韩文波本科可快速部署的指纹识别门禁系统BS2013-B282 费泰伟吕寄望聂凌霄北京电子科技学院北京李秀滢本科基于Mega16单片机的人体生理信号采集系统BS2013-B283 王瑞东刘常玉王笛德州学院山东冯琨齐立省本科基于LM3S615的栓塞病人康复器BS2013-B284 王效李号刘鹏德州学院山东赵庆福曲培树本科粉尘终结者BS2013-B286 李穆粱志龙华侨大学福建杨冠鲁本科基于MCS-51单片机的家居照明系统BS2013-B291 许国贤周温州黄凯凯华侨大学福建杨冠鲁本科基于混合电抗补偿及电力电子技术的稀土永磁发电机电压调节器BS2013-B293 林择东华侨大学福建杨冠鲁本科无人机飞行姿态识别BS2013-B294 辛增苏保鑫边长安德州学院山东张福安本科元件酷BS2013-B298 贾鑫黑龙江科技学院黑龙江陈义平谢玉鹏黄玉琴本科智能输液报警器BS2013-B304 黄国宁李邦包楚权安徽大学安徽许先璠本科360度超声波密码锁BS2013-B305 王琪朱小忠安徽大学安徽许先璠本科基于单片机智能识别门禁系统BS2013-G001 陈智朝胡斯哲巴强华武汉交通职业学院湖北朱一多高职基于CortexM3的公交预报站系统设计BS2013-G004 董文超武汉软件工程职业学院湖北卢贶高职基于GPS的小型飞行控制系统BS2013-G006 顾强韩方营贺潇湖北轻工职业技术学院湖北何伶俐赵欣高职智能探测机器人BS2013-G007 梅梦琪尹灿余旭湖北轻工职业技术学院湖北于海燕赵欣高职魔法盒子BS2013-G012 曾鹏飞赖丽莎冯乐北京农业职业学院北京曲爱玲刘红梅高职光立方BS2013-G014 贾旺旺铁岭师范高等专科学校辽宁王永新李劲松高职无线多功能智能车BS2013-G015 张强铁岭师范高等专科学校辽宁王殿军冯文涛高职万年历BS2013-G018 赵萌于子洋刘亚权河南林业职业学院河南刘斌任雁高职基于EXP-89S51激光音效合成器BS2013-S001 钟子龙李园张暐兰州大学甘肃张在峰马义德研究生基于Cortex-M3的自动对焦系统。
水平多关节型机器人 LS-B 系列 手册说明书

LS-B 系列手册Rev.2水平多关节型机器人LS-B系列手册Rev.2Copyright 2021 SEIKO EPSON CORPORATION. All rights reserved. LS-B 系列 Rev.2 i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用机器人所需的事项。
安装该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
本公司的产品均通过严格的测试和检查,以确保机器人系统的性能符合本公司的标准。
但是如果在超出本手册所描述的环境中使用本产品,则可能会影响产品的基本性能。
本手册阐述了本公司可以预见的危险和问题。
请务必遵守本手册中的安全注意事项,安全正确地使用机器人系统。
商标Microsoft、Windows及Windows标识为美国Microsoft Corporation在美国或其它国家的注册商标或商标。
其它品牌与产品名称均为各公司的注册商标或商标。
关于标记Microsoft® Windows® 8 Operating systemMicrosoft® Windows® 10 Operating system本使用说明书将上述操作系统分别标记为Windows 8, Windows 10。
另外,有时可能将Windows 8, Windows 10统一标记为Windows。
注意事项禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进之处,请不吝斧正。
制造商Array联系方式有关咨询处的详细内容,请参阅下记手册序言中的“销售商”。
机器人系统安全手册请先阅读本手册ii LS-B 系列 Rev.2报废报废本产品时,请根据各国或各地区的法律法规进行报废处置。
关于电池处理产品上贴有“crossed out wheeled bin”(打叉的带轮垃圾桶)标签,表示该产品及其所含电池不得作为正常的生活垃圾处理。
工业机器人编程与维护多选题
工业机器人编程与维护多选题1、JMP指令必须和()指令联用。
A、LBL(正确答案)B、WHILEC、WAITD、CALL2、程序编辑可以用以下哪些按键?()。
A、INSERT(正确答案)B、COPY(正确答案)C、FIND(正确答案)D、REPLACE(正确答案)3、工业机器人自带的程序有()。
A、MAIN(正确答案)B、TEST(正确答案)C、RSR(正确答案)D、PNS(正确答案)E、PART(正确答案)4、以下哪些是设置PNS程序的步骤()。
A、依次按键操作:MENU-SETUP-F1RSR/PNS或ProgSelect(正确答案)B、依次按键操作:MENU-I/O-F1TYPE-UOP,并通过F3IN/OUT选择输入界面(正确答案)C、系统信号UI[10]置ON,UI[11]置ON,UI[14]置ON,分别对PNS2PNS3,PNS6,基数为100(正确答案)D、按照PNS程序命名要求,选择的程序为PNS0138(正确答案)5、以下哪些是设置RSR程序的步骤()。
A、依次按键操作:MENU-I/O-F1TYPE-UOP,并通过F3IN/OUT选择输入界面(正确答案)B、系统信号UI[10]置ON,UI[10]对应RSR2,RSR2的记录号为21,基数为100(正确答案)C、按照RSR程序命名要求,选择的程序为RSR0121(正确答案)D、依次按键操作:MENU-SETUP-F1TYPE-RSR/PNS或ProgSelect(正确答案)6、以下哪步是进去程序计时器指令必不可少的步骤?()。
A、选择MENU(正确答案)B、STATUE(正确答案)C、F1(TYPE)(正确答案)D、PrgTimer(正确答案)7、功能键读取指令分别有()FK5。
A、Text(正确答案)B、FK1(正确答案)C、FK2(正确答案)D、FK3(正确答案)E、FK4(正确答案)8、工业机器人操作提示信息主要有()。
MH165机器人使用说明书
MH165
2 2.1
搬运 搬运方法
图 2-1: 搬运姿势
B 䜘䈖മ
ₑ㜦ᶯ
ກᯉ㜦ᑖ ˄哴㢢˅
B
1њ
A 䜘䈖മ
䫙
A
4њ
ᆹᐍ⭥ᵪࠪলᰦⲴ䖤䀂ᓖ৺㜹ߢ
䖤 䀂ᓖ 㜹ߢ
S 0 0 L -60 U -63.9 R 0 0 B -86.1 -147520 T 0 0
-143518 -134502
਼व㻵ѝᴹ㻵༷⭥㔶Ⲵᛵߥлˈ ṩᦞ㿴Ṭн਼㘼н਼DŽ
•
在理解 DX100 使用说明书的 “警告标志”的基础上,使用机器 人。
本书常用词汇定义
“ MOTOMAN”是安川电机工业机器人的商品名。
MOTOMAN 由机器人本体 “机器人” 、机器人控制柜 “DX100” 、 “DX100 示教编程器”和 “连接电缆”构成。 在本书中,这些部分显示如下。
机器人各部分
MOTOMAN-MH165
机器人使用说明书
型号 : YR-MH00165-A00 ( 标准型 ) YR-MH00165-A01 (SLU 轴装有限位开关 )
请确保使用说明书到达本产品的最终使用者手中。
MOTOMAN 使用说明书一览表 MOTOMAN-MH165 机器人使用说明书 DX100 使用说明书 DX100 操作要领书 DX100 维护保养说明480204
MH165
1 1.2
设备到达后的开箱检查 订货号的确认
1.2
订货号的确认
请确认机器人与 DX100 为同一订货号。在下图位置的标签上写有订货号。
图 1-1: 标签张贴位置
ḷㆮ ˄᭮བྷമ˅
THE MANIPULATOR AND THE CONTROLLER SHOULD HAVE SAME ORDER NUMBER.