齿轮啮合传动.
标准渐开线齿轮直齿圆柱齿轮啮合传动
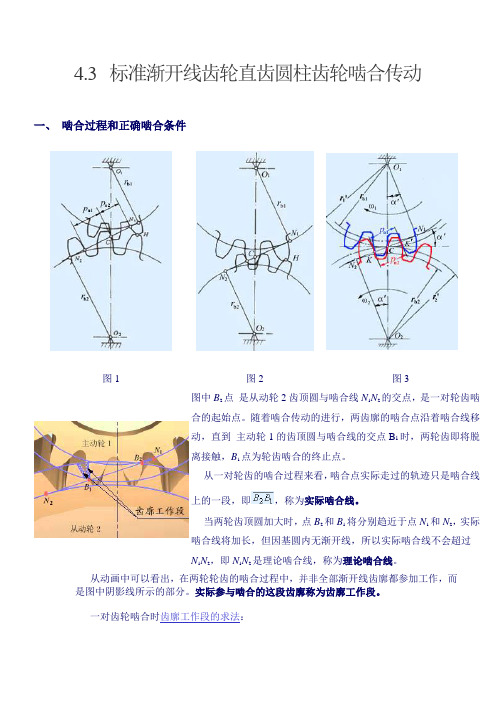
4.3 标准渐开线齿轮直齿圆柱齿轮啮合传动一、啮合过程和正确啮合条件图1 图2 图3图中B2点是从动轮2齿顶圆与啮合线N1N2的交点,是一对轮齿啮合的起始点。
随着啮合传动的进行,两齿廓的啮合点沿着啮合线移动,直到主动轮1的齿顶圆与啮合线的交点B1时,两轮齿即将脱离接触,B1点为轮齿啮合的终止点。
从一对轮齿的啮合过程来看,啮合点实际走过的轨迹只是啮合线上的一段,即,称为实际啮合线。
当两轮齿顶圆加大时,点B2和B1将分别趋近于点N1和N2,实际啮合线将加长,但因基圆内无渐开线,所以实际啮合线不会超过N1N2,即N1N2是理论啮合线,称为理论啮合线。
从动画中可以看出,在两轮轮齿的啮合过程中,并非全部渐开线齿廓都参加工作,而是图中阴影线所示的部分。
实际参与啮合的这段齿廓称为齿廓工作段。
一对齿轮啮合时齿廓工作段的求法:三个图中的齿轮都是渐开线齿轮,但图1和图2中的主动轮只能带动从动轮转过一个小角度就卡死不能动了,而图3中的主动轮可以带动从动轮整周转动,看来并不是任意两个渐开线齿轮都能正确地进行啮合,而是必须满足一定的条件,即正确啮合条件。
那么,这个条件是什么?从图3中可以看出:两个渐开线齿轮在啮合过程中,参加啮合的轮齿的工作一侧齿廓的啮合点都在啮合线N1N2上。
而在图1和图2中,工作一侧齿廓的啮合点H不在啮合线N1N2上,这就是两轮卡死的原因。
从图3中可以看出是齿轮1的法向齿矩,是齿轮2的法向齿矩,亦即:这个式子就是一对相啮合齿轮的轮齿分布要满足的几何条件,称为正确啮合条件。
由渐开线性质可知,法向齿距与基圆齿距相等,故上式也可写成将和代入式中得:由于模数m和压力角均已标准化,不能任意选取,所以要满足上式必须使:结论:一对渐开线齿轮,在模数和压力角取标准值的情况下,只要它们分度圆上的模数和压力角分别相等,就能正确啮合。
二、齿轮传动的正确安装条件1、齿侧间隙为了避免齿轮在正转和反转两个方向的传动中齿轮发生撞击,要求相啮合的轮齿的齿侧没有间隙。
齿轮传动

接触面↓,承载能力↓
传动失效
改善措施:
1)HB↑——[σH] ↑ 2)↑ρ(综合曲率半径) 3)↓表面粗糙度,↑加工精度 4)↑润滑油粘度 ↑接触强度
3.齿面的胶合:
齿面粘连后撕脱
原因:
高速重载;滑动速度大; 散热不良;齿面金属熔化粘连 后撕脱——热胶合 低速重载,由于齿面间油膜 破坏,也会出现胶合——冷胶合
交错轴斜齿轮传动
蜗 轮 蜗 杆 传 动
8avi
4、按齿轮啮合方式
直 齿 圆 柱 齿 轮 传 动
外齿轮 外啮合齿轮传动 内齿轮 内啮合齿轮传动
齿轮齿条啮合
齿
条Байду номын сангаас
5、按齿轮传动工作条件
◆ 闭式齿轮传动
◆
开式齿轮传动
6、按齿轮圆周速度高低
◆ ◆ ◆ 极低速齿轮传动 低速齿轮传动 中速齿轮传动 小于0.5 m/s
——蜗杆的螺旋升角;
d1 ——蜗杆直径,有标准值,mm; n1 ——蜗杆转速,r/min。
由上式可见,Vs值较大,而且这种滑动是沿着齿长方向 产生的,所以容易使齿面发生磨损及发热,致使齿面产生胶 合而失效。因此,蜗杆传动最易出现的失效形式是磨损和胶 合。当蜗轮齿圈的材料为青铜时,齿面也可能出现疲劳点蚀。 在开式蜗杆传动中,由于蜗轮齿面遭受严重磨损而使轮齿变 薄,从而导致轮齿的折断。 在一般情况下,由于蜗轮材料强度较蜗杆低,故失效大多 发生在蜗轮轮齿上。 避免蜗杆传动失效的措施有:供给足够的和抗胶合性能好 的润滑油;采用有效的散热方式;提高制造和安装精度;选 配适当的蜗杆和蜗轮副的材料等。
原因:σH>[σH]
脉动循环应力 1)齿面受多次交变应力作用,产生接触疲劳裂纹; 2)节线处常为单齿啮合,接触应力大; 3)节线处为纯滚动,靠近节线附近滑动速度小,油膜不易形成,
一级常用传动装置

皮带传动
皮带传动缺点
1. 在传递动力过程中,会有时间上的延缓。 2. 不能准确无误的传动。 3. 传动时,能量损失比较大。 4. 皮带容易破损。
传动链
传动链通常用于低速度大负荷的经济型动力传动装置, 主要有滚子链和齿形链等种类。
齿形链
滚子链
传动链
传动链特点
1. 传动链传动时要求必须在同一平面连接,否则传动链两侧 受力不均而容易断裂。
是()
A.两个链轮的转向相同 B.大链轮的转速较大
C.大链轮是从动轮
D.小链轮是主动轮
答案是 A
7.下列说法不正确的是() A.皮带的噪音比齿轮和传动链的小 B.传动链、皮带可以远距离传递动力 C.皮带、齿轮、传动链结构中的两轮转动方向都必须是同向 D.传动链每一节都可以拆卸,所以传动的距离可以自由调节
齿轮传动缺点
1. 噪音大 2. 易损坏
皮带传动
皮带传动连接方式
(1)平行传动。皮带直接绕过两个传动轮, 这种传动方式也称作开口传动。传动时两个 滑轮转动方向相同。
(2)交叉传动。皮带反方向180度绕过两传 动轮,这种传动方式叫交叉传动。交叉传动 时,两个滑轮的转动方向相反。
皮带传动
皮带传动优点
1. 可实现远距离传动。 2. 在突然施加外力或者突然变速时,可以保护机械,不会
量
小
3. 在 皮 带 的 弹 性 范 围 内 3. 皮 带 速 度 过 大 或 突
垂直平面(轴异面垂直): 皮带半不在同一平面不讨论
远距离传递动力
然加速会导致皮带断
交叉
方向
裂
下节内容:功与能量
练习题
1.有一对相互啮合传动的齿轮,小齿轮带动大齿轮转动时,此齿轮传动的作用是
齿轮相互啮合的条件

齿轮相互啮合的条件齿轮是一种常见的机械元件,广泛应用于各种机械传动系统中。
齿轮的相互啮合是保证机械传动正常运转的关键条件之一。
本文将从不同角度探讨齿轮相互啮合的条件。
齿轮相互啮合的条件之一是齿轮的齿数匹配。
在传动系统中,两个相互啮合的齿轮的齿数应满足特定的条件,以确保传递的动力和转矩的平稳传递。
一般来说,齿轮的齿数比应该是整数,以避免齿轮在啮合过程中产生冲击和振动。
如果齿数比不合适,就会导致齿轮的啮合不完整,甚至无法正常工作。
齿轮相互啮合的条件还包括齿轮的模数匹配。
齿轮的模数是指齿轮齿廓曲线的尺寸参数之一,它决定了齿轮的齿数和齿轮的尺寸。
在传动系统中,相互啮合的齿轮的模数应相等,以保证齿轮的啮合质量。
如果齿轮的模数不匹配,就会导致齿轮的啮合不紧密,产生剧烈的噪声和振动,甚至使传动系统无法正常工作。
齿轮相互啮合的条件还包括齿轮的压力角匹配。
压力角是齿轮齿廓曲线与齿轮轴线之间的夹角,它决定了齿轮的啮合性能。
在传动系统中,相互啮合的齿轮的压力角应相等,以确保齿轮的啮合平稳。
如果齿轮的压力角不匹配,就会导致齿轮的啮合不良,产生较大的摩擦和磨损,降低传动效率。
齿轮相互啮合的条件还包括齿轮的齿向间隙匹配。
齿向间隙是指齿轮齿廓曲线与齿轮轴线之间的距离,它决定了齿轮的啮合间隙。
在传动系统中,相互啮合的齿轮的齿向间隙应相等,以确保齿轮的啮合质量。
如果齿轮的齿向间隙不匹配,就会导致齿轮的啮合松动,产生较大的摩擦和磨损,降低传动效率。
齿轮相互啮合的条件还包括齿轮的材料和热处理匹配。
在传动系统中,相互啮合的齿轮的材料应相同或相近,以确保齿轮的强度和硬度。
同时,齿轮的热处理工艺也应相同或相近,以确保齿轮的耐磨性和耐疲劳性。
如果齿轮的材料和热处理不匹配,就会导致齿轮的损坏和故障,影响传动系统的正常运行。
齿轮相互啮合的条件包括齿数匹配、模数匹配、压力角匹配、齿向间隙匹配以及材料和热处理匹配等。
只有在这些条件的保证下,齿轮传动系统才能正常运转,确保动力和转矩的平稳传递。
《齿轮机构啮合传动》课件

齿轮机构啮合传动的应用
应用
齿轮机构啮合传动广泛应用于各种机械传动系统和工业领域 ,如汽车、航空、船舶、能源、化工等。
举例
汽车发动机中的曲轴与凸轮轴之间的啮合传动,实现发动机 的工作循环;风力发电机中的齿轮箱,将风能转化为电能; 船舶推进器中的齿轮传动,驱动螺旋桨旋转等。
02
齿轮机构啮合传动的类型
业领域,如汽车、飞机、机床等。
蜗杆蜗轮传动
总结词
具有减速、自锁和传递大扭矩的特点,常用于精密设备和自动化控制系统。
详细描述
蜗杆蜗轮传动是一种特殊的齿轮类型,其特点是蜗杆和蜗轮相互啮合,传递旋转运动和 扭矩。与直齿圆柱齿轮、斜齿圆柱齿轮和圆锥齿轮相比,蜗杆蜗轮传动具有减速、自锁 和传递大扭矩的特点,常用于精密设备和自动化控制系统。这种传动方式广泛应用于各
BIG DATA EMPOWERS TO CREATE A NEW ERA
《齿轮机构啮合传动》ppt
课件
• 齿轮机构啮合传动的概述 • 齿轮机构啮合传动的类型 • 齿轮机构啮合传动的特性 • 齿轮机构啮合传动的优化设计 • 齿轮机构啮合传动的未来发展
目录
CONTENTS
01
齿轮机构啮合传动的概述
BIG DATA EMPOWERS TO CREATE A NEW
ERA
直齿圆柱齿轮传动
总结词
最常见的齿轮类型,两个直齿圆柱齿轮相互啮合,传递扭矩和旋转运动。
详细描述
直齿圆柱齿轮传动是最常见的齿轮类型,其特点是两个直齿圆柱齿轮相互啮合,通过传递扭矩和旋转运动来驱动 机械设备。这种传动方式广泛应用于各种工业领域,如汽车、飞机、机床等。
圆锥齿轮传动
总结词
适用于传递垂直或倾斜方向的扭矩和旋转运 动,具有较高的承载能力和可靠性。
啮合齿轮传动比的计算公式
啮合齿轮传动比的计算公式
啮合齿轮传动比的计算公式为:i=z2/z1=n1/n2。
其中,z1和z2分别为主动轮和从动轮的齿数,n1和n2分别为主动轮和从动轮的转速。
此外,也有公式表示为:i=N2 / N1,其中,N1为驱动轴(或主动轴)的转速,N2为从动轴(或被动轴)的转速。
传动比代表了从动轴转速相对于驱动轴转速的增益或减益,其大小决定了齿轮传动的速度变换比例。
请注意,实际应用中由于齿轮的啮合会产生一定的齿隙和滑动,使得实际传动比可能与理论计算值有一定的误差。
因此,在进行齿轮传动设计时,需要考虑传动效率的影响,以提高齿轮传动的工作效率。
齿轮啮合原理
齿轮啮合原理
齿轮是一种常见的机械传动装置,通过齿轮的啮合来实现转速和转矩的传递。
而齿轮的啮合原理是齿轮传动的基础,了解齿轮啮合原理对于理解齿轮传动的工作原理和应用具有重要意义。
齿轮的啮合原理主要包括啮合点、啮合线和啮合角。
啮合点是指两个齿轮齿面接触的点,啮合线是通过啮合点的轨迹,啮合角是齿轮齿面上两个相邻齿的啮合线之间的夹角。
在齿轮传动过程中,啮合点的位置会不断变化,而啮合线和啮合角则是决定齿轮啮合工作状态的重要参数。
齿轮的啮合原理可以通过几何学和力学原理来进行分析。
在几何学上,齿轮的啮合原理可以通过齿轮的齿数、模数、压力角等参数来确定齿轮的啮合状态。
而在力学原理上,齿轮的啮合原理可以通过齿轮的模量、齿面接触应力、啮合刚度等参数来确定齿轮的传动性能。
在实际应用中,齿轮的啮合原理对于齿轮传动的设计和制造具有重要意义。
通过合理选择齿轮的参数和啮合角度,可以实现齿轮传动的高效、稳定和可靠运行。
同时,了解齿轮的啮合原理还可以
帮助工程师优化齿轮传动系统的结构和性能,提高齿轮传动的工作效率和可靠性。
总之,齿轮的啮合原理是齿轮传动的基础,了解齿轮的啮合原理对于理解齿轮传动的工作原理和应用至关重要。
通过深入研究齿轮的啮合原理,可以为齿轮传动的设计、制造和应用提供重要的理论指导和技术支持。
希望本文对于读者对齿轮啮合原理有所帮助。
齿轮啮合原理(一)
齿轮啮合原理(一)齿轮啮合原理1. 什么是齿轮啮合?•齿轮啮合是指两个或多个齿轮的齿顶和齿谷之间的正面接触,使得齿轮能够传递转矩和运动。
2. 齿轮的结构•齿轮由齿圈和齿柱组成。
齿圈是齿轮的外部圆柱形部分,齿柱则是齿圈上的齿状突起。
3. 齿轮的类型•齿轮根据其结构和用途可分为直齿轮、斜齿轮、锥齿轮等类型。
4. 齿轮啮合的基本原理•原理1:齿轮的啮合使得两个齿轮之间形成了准确的传动比。
例如,一个小齿轮传递给一个大齿轮,可以实现转速的降低但转矩的增加。
•原理2:齿轮啮合过程中,两个齿轮的齿面通过滚动或滑动方式接触,形成传递转矩的力。
•原理3:齿轮的齿顶和齿谷之间接触面积大,接触压力均匀分布,从而能够传递较大的转矩。
5. 齿轮啮合的应用•齿轮啮合广泛应用于机械传动系统,如汽车变速箱、工业机械、机器人等。
•齿轮还被用于时钟、钟表等领域,通过啮合方式实现精确的时间测量。
6. 齿轮啮合的优势和注意事项•优势:齿轮传动的效率高,传递效果稳定可靠,使用寿命长。
•注意事项:齿轮的制造和安装需要保持精度,以确保齿轮的准确啮合,避免因啮合不良造成的振动和噪音。
7. 齿轮啮合的未来发展•随着科技的发展,新材料和新制造技术的应用,齿轮啮合技术将不断进步和改进,以提高效率、降低噪音和延长使用寿命。
•齿轮啮合的自动化和智能化应用也将成为未来的发展方向,提高生产效率和精确度。
以上是对齿轮啮合原理的简要解释。
齿轮啮合作为一项重要的机械传动技术,其原理和应用对我们日常生活和工业制造有着重要的影响。
希望通过本文能够让读者对齿轮啮合有一个初步的了解。
8. 齿轮啮合的计算与设计•齿轮啮合的计算与设计是确保齿轮传动有效运行的重要环节。
•在计算过程中,需要考虑齿轮的模数、齿数、压力角、重合度等参数,并采用力学原理进行力和转矩的计算。
•齿轮啮合设计的目标是使得齿轮的使用寿命长、传动效率高,并且尽量减小噪音和振动。
9. 齿轮啮合的振动和噪音控制•齿轮啮合过程中,由于齿轮齿面的不完全匹配和啮合角度的误差,会产生振动和噪音。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
N1
• 标准齿轮标准安装时: a' a • 即r’1 = r1 r’ 2 = r2 • 节圆与分度圆重合,此时啮合 角等于压力角,a’ =a
a’=a
N2
c *m
2
O2
机械设计基础——齿轮机构及其设计
二、渐开线齿轮的可分性
• 中心距变化不影响传动比
O1 r’1 1 rb1 K P N1 K
机械设计基础 ——齿轮传动
5-5 渐开线直齿轮的啮合传动
一、正确啮合条件 二、连续传动条件 — 重合度 三、无侧隙啮合条件 —标准中心距
机械设计基础 ——齿轮传动
一、正确啮合条件
• 正确啮合条件: pn1=pn2
pn1 pn2
pb1 pb 2
1
O1
pm1c osa1 = pm2cosa2
m1 m2 m a1 a 2 a
N2 P
N1
两轮的模数和压力角 分别相等
' d b 2 d 2 z2 n1 1 d 2 i 一对齿轮的传动比:12 ' n2 2 d1 d d 1 d1 z1
2
O2
机械设计基础 ——齿轮传动
若pn1≠pn2,两轮法向齿距不等时情况如何?
• 两轮法向齿距不等时( pn1≠pn2 ),轮齿发生干 涉,两轮不能正确啮合传动
• 两轮法向齿距相等时( pn1=pn2 ),两轮能正确 啮合传动
机械设计基础 ——齿轮传动
二、连续传动条件——重合度
O1
1 渐开线齿廓传动平稳性
• 啮合线: 啮合点的轨迹 N1N2 • 啮合点的公法线:N1N2
1
rb1
N1 K
• 二基圆内公切线: N1N2
• 接触点正压力方向:N1N2 • 基圆的内公切线N1N2为
N2
P
K’
(理论)啮合线
• 啮合点均在啮合线N1N2上
四线合一
rb2
2
O2
机械设计基础 ——齿轮传动
2 一对齿轮的啮合过程
ra1
• 啮合线N1N2 • 理论啮合线段: N1N2(啮合极限点) • 开始啮合时,主动轮的齿根与从动 轮的齿顶接触,逐渐下移 • 主动轮:齿根齿顶 • 从动轮:齿顶齿根 • 脱离啮合时,主动轮齿顶与从动轮 的齿根接触 • 开始啮合点:从动轮的齿顶圆与啮 合线N1N2的交点B2 • 终止啮合点:主动轮的齿顶圆与啮 合线N1N2的交点B1 • 实际啮合线段: B1B2 • 齿顶圆加大,B2、B1就趋近于N1、N2
1 O2 P r '2 rb 2 i12 C 2 O1P r '1 rb1
O1
a
r’1
1
rb1 N1
C1
C2
P
C1
C2
N2
2 rb2 r’2
N2
2 rb2
r’2
O2
O2
P K
rb2 a’
ra2
O2
• 连续传动条件: > 1 • 重合度愈大,表明同时参与啮合 的轮齿对数愈多,传动愈平稳, 每对轮齿所承受的载荷愈小
机械设计基础 ——齿轮传动
重合度的物理解释
• 重合度大,表明同时 啮合的轮齿对数多 • 例: a = 1.3
N1 B1 D 0.3Pb
1.3Pb Pb Pb 0.7Pb 0.3Pb
了解
C P
B2
N2
单 齿 啮合区 双齿 啮合区
机械设计基础 ——齿轮传动
O1
比较
N
a
1
N1
a’=a
N2
节 圆(啮合参数)O 分度圆(几何参数) 啮合角(啮合参数) 压力角(几何参数) O 节点:啮合接触点的公法线与连心线的交点 节圆:过节点的圆 啮合线:齿廓接触点的轨迹 啮合角:节圆的公切线与啮合线N1N2之间的夹角(锐角) 分度圆:齿轮上模数和压力角均为标准值的圆 压力角:齿轮齿廓上的法线与速度方向之间的夹角(锐角)
2 2
2
机械设计基础 ——齿轮传动
三、无侧隙啮合条件 ——标准中心距
• 标准齿轮:m, a, ha*,c*等于标准数值, s = e = pm/2
• 标准齿轮标准安装:无侧隙、标准顶隙 • 标准中心距:
a ra1 c rf 2 r1 r2 m( z1 z2 ) / 2
a' r1 ' r2 '
O1 1
rb
1
B2
P
N1
B1
N2
2
ra2
rb2
O2
• 齿廓实际工作段
机械设计基础 ——齿轮传动
3 、重合度
• 工程要求:齿轮有可能在啮合 线上两点同时接触 • 几何条件: B1B2 > pb • 重合度:
ra1
O1 1
a’ rb1 aa1 B2
N1
B1 B2 / pb
B1 N2 aa2