重型汽车双前桥转向运动学分析
重型汽车双桥转向系统优化 开题报告 (2)
重型卡车离合器操纵机构优化设计开题报告一、选题依据(一)研究目的、意义1.研究目的:离合器是汽车传动系的重要部件。
汽车从启动到行驶的整个过程中,离合器它的作用是使发动机与变速器之问能逐渐接合.从而保证汽车平稳起步;替时切断发动机与变速器之间的联系.以便于换档和减少换档时的冲击:当汽车紧急制动时能起分离作川,防止变速器等传动系统过载,起到一定的保护作用:离合器类似开关.接合或断离动力传递作用,因此.任何形式的汽车都有离合装置,只是形式不同而已。
随着科技的飞速发展,特别是液压技术、电子技术在汽车领域的广泛应用,汽车传动系发生了巨大的变化。
作为传动系重要组成部件之一的离合器总成,担负着传力、减震和防止系统过载等重要作用。
伴随着自动变速器技术及与之相配套的离合器技术的完善,离合器产品不论是性能结构方面还是生产制造方面都发生了很大变化。
1981年,法国人制成了摩擦片式离合器,此后浸在油中工作的湿式多片离合器逐渐取代了锥形离合器,但多片湿式摩擦离合器的片与片之间容易被油粘住,致使离合器分离不彻底,造成换档困难,所以它又逐渐被干式多片离合器取代。
多片干式离合器的住要优点是由于接触面多,故接合平顺柔和,保证了汽车的平稳起步;但因片数多,从动部分的转动惯量大,还是感到换档不够容易。
另外,中间压盘的通风散热不良,容易引起过热,加快了离合器的磨损,甚至烧伤和碎裂,如果调整不当还可能引起离合器分离不彻底。
随2.研究意义:着汽车运输业的发展,离合器还要在原有的基础上不断提高改进,一适应新的使用条件。
从国外的发展动向来看,近年来车辆在性能上向高速发展,发动机的功率和转速不断提高,载货汽车趋于大型化,国内也有类似情况。
此外,随着汽车发动机转速功率的不断提高和汽车电子技术的高速发展,人们对离合器的要求越来越高,离合器的使用条件也越来越苛刻。
从提高离合器性能的角度出发,传统推式膜片弹簧离合器的结构正逐步地向拉式膜片弹簧离合器结构发展,传统的操纵形式正向自动操纵形式发展。
重型自卸汽车设计(转向系及前桥设计)

重型自卸汽车设计(转向系及前桥设计)摘要汽车在行驶的过程中,需要按照驾驶员的意志经常改变其行驶方向,即所谓的汽车转向。
汽车的转向系统是一套用来改变或恢复汽车行驶方向的专用机构,本文的研究内容即是重型自卸汽车的转向系设计。
本文针对的是与非独立悬架相匹配的整体式两轮转向机构。
利用相关汽车设计和连杆机构运动学的知识,首先对汽车总体参数进行设计,在此基础上,对转向器,转向传动机构进行选择,接着再对转向器和转向传动机构(主要是转向梯形)进行设计,最后,利用软件AUTOCAD完成转向梯形和转向器的设计图纸。
转向器在设计中选用的是循环球式齿条齿扇转向器,在对转向器的设计中,包括了螺杆—钢球—螺母传动副的设计和齿条—齿扇传动副的设计,前者是基于参照同类汽车,确定出钢球中心距,设计出一系列的尺寸,而后者则是根据汽车前轴的载荷来确定出齿扇模数,再由此设计出所有参数的。
转向梯形的设计选用的是整体式转向梯形,本文在设计中借鉴同类汽车转向梯形设计的经验尺寸对转向梯形进行尺寸初选。
再通过对转向内轮实际达到的最大偏转角时与转向外轮理想最大偏转角度的差值的检验,和作为一个四杆机构对I其最小传动角的检验,来判定转向梯形的设计是否符合基本要求。
本文在消化,吸收,总结,归纳前人的成果上,系统、全面地对机械动力转向系进行理论分析,设计及优化。
为重型自卸汽车转向系的设计开发提供了一种步骤简单的设计方法。
关键词:转向系,转向器,转向梯形IITHE DESIGN OF HEAVY DUMP (THE DESIGN OF STEERING SYSTEM AND RRONT AXLE)ABSTRACTIn a moving vehicle, the driver will need to frequently change its traveling direction, the so-called steering. Vehicle steering system is used to change or restore a car in the direction of a dedicated agency, the contents of this paper is the study of light vehicle steering system design.This article is aimed at non-independent suspension and would like to match the overall style of the two steering. The use of the relevant vehicle design and kinematic linkage of knowledge, first of all, the overall parameters of the vehicle design, in this basis, the steering gear, steering transmission choice, and then to the steering gear and steering transmission (mainly trapezoidal steering ) design, and finally, the use of AUTOCAD software and the steering gear steering linkage to complete the design drawings.Steering the ball of choice is the cycle of fan-type steering gear rack teeth, in the design of steering gear, including a screw - Ball - Vice-nutIIIdrive the design and rack - fan drive gear pair design, the former is based on the reference to similar vehicles, to determine the center distance of the ball, the design of a series of size, while the latter is based on the vehicle front axle load to determine the fan module out of gear, and then all of the resulting design parameters.Steering linkage design is a whole selection of steering trapezoid, the paper design is used in car steering linkage from a similar experience in the design of the size of the steering linkage to the primary size. Through to the actual steering wheel in the maximum deflection angle with the steering wheel in the most ideal test of the difference of deflection angle, and four institutions, as a minimum transmission angle of its examination, to determine whether the design of steering trapezoid in line with the basic requirements.In this paper, digestion, absorption, and summing up, summing up the results of their predecessors, the systematic, comprehensive mechanical steering system to carry out theoretical analysis, design and optimization. For the light vehicle steering system design and development provides a simple design method steps.Key word: steering system,steering gear,steering trapezoidIV目录前言 (1)第一章从动桥结构方案的确定 (3)§1.1从动桥总体方案确定 (3)第二章转向系结构方案的确定 (5)§2.1转向系整体方案的分析 (5)§2.1.1转向器方案的分析 (5)§2.1.2 循环球式转向器结构及工作原理 (6)§2.1.2动力转向系统分类 (7)§2.2转向系整体方案的分析 (8)第三章从动桥的设计计算 (10)V§3.1从动桥主要零件尺寸的确定 (10)§3.2 从动桥主要零件工作应力的计算 (11)§3.2.1 制动工况下的前梁应力计算 (12)§3.2.2 在最大侧向力(侧滑)工况下的前梁应力计算 (16)§3.3 转向节在制动和侧滑工况下的应力计算 (17)§3.3.1 在制动工况下 (17)§3.3.2 在侧滑况下 (19)§3.4 主销与转向节衬套在制动和侧滑工况下的应力计算 (20)§3.4.1 在制动工况下 (20)§3.4.2 在侧滑工况下 (22)第四章转向系统的设计计算 (24)§4.1 转向系主要性能参数 (24)VI§4.1.1 转向器的效率 (24)§4.1.2 传动比的变化特性 (26)§4.1.3 给定的主要计算参数 (27)§4.1.4 转向盘回转总圈数n (28)§4.2 转向系计算载荷的确定 (29)§4.3 循环球式转向器的计算 (30)§4.3.1 循环球式转向器主要参数 (30)§4.3.2 螺杆、钢球和螺母传动副 (31)§4.3.3 齿条、齿扇传动副设计 (32)§4.4 循环球式转向器零件强度的校核 (35)§4.4.1 钢球与滚道间的接触应力σ (35)§4.4.2 齿的弯曲应力σ (37)VII§4.5 液压动力转向机构的计算 (38)§4.5.1 动力转向系统的工作原理 (38)§4.5.2 转向动力缸的工作分析 (39)§4.6 转向梯形机构确定、计算及优化 (45)§4.6.1 转向梯形结构方案分析 (45)§4.6.2 整体式转向梯形机构优化设计 (47)第六章结论 (57)参考文献 (58)致谢 (60)VIIIIX前言自卸车是利用发动机动力驱动液压举升机构,将车厢倾斜一定角度从而达到自动卸货,并依靠箱货自重使其复位的专用汽车。
双前轴重型汽车转向系统装配工艺研究

双前轴重型汽车转向系统装配工艺研究罗宏刚;孙文涛;马国兴;王晓锋【摘要】转向系统作为重型汽车的重要组成部分,由于设计或者装配制造的不当,可导致转向传动部件之间的干涉,危及驾驶员的人身安全,因此需深入研究转向系统设计和装配方法.文章以转向系统故障重现的方式为切点,通过数模仿真校验、结构优化实验、工艺方法提升等途径,全方位解析和处理了转向传动部件干涉问题.强化了对转向系统的深刻认知和系统学习,而且此类分析问题的方法,有助于解决其他相对运动部件较多的干涉现象.【期刊名称】《汽车实用技术》【年(卷),期】2017(000)008【总页数】3页(P85-86,92)【关键词】转向系统;传动;干涉【作者】罗宏刚;孙文涛;马国兴;王晓锋【作者单位】陕西重型汽车有限公司,陕西西安 710200;陕西重型汽车有限公司,陕西西安 710200;陕西重型汽车有限公司,陕西西安 710200;陕西重型汽车有限公司,陕西西安 710200【正文语种】中文【中图分类】U463.4CLC NO.:U463.4 Document Code: A Article ID: 1671-7988 (2017)08-85-03 转向系作为整车的重要组成部分,其用来保持或者改变汽车的行驶方向。
驾驶员通过转向操纵装置,实现车辆的直行或转弯状态。
承载较重的重型汽车,转向系统对驾驶的舒适型和安全性也起着至关重要的作用,因此,转向系统各部件结构的设计与匹配都尤为重要,装调过程中各部件之间的连接也必须按照工艺要求操作,以保证转向系统功能项。
双转向轴的重型汽车,其转向系统包括:转向操纵、转向助力、转向传动三部分。
其中转向传动结构中包括:转向器、转向器支架、摇臂、拉杆、转向梯形、助力缸等部件。
驾驶员给方向盘施加一个外力,通过转向管柱和伸缩轴传递给转向器输入轴,经转向器放大力矩和减速运动后传到转向摇臂,再通过转向拉杆传递给转向轴上的节臂,使转向轴偏转,实现转向功能,如图1所示。
重卡双前桥转向摇臂机构的优化设计

重卡双前桥转向摇臂机构的优化设计
古玉锋 方宗德 沈云波
西 北 工 业 大 学 ,西 安 ,710072
摘 要 :针 对 重 卡 双 前 桥 转 向 摇 臂 机 构 传 统 单 目 标 优 化 方 法 考 虑 因 素 的 不 足 ,提 出 了 以 二 轴 左 轮 转 角 误 差 最 小 、转 向 杆 系 与 悬 架 运 动 的 最 大 干 涉 量 最 小 、左 右 转 向 力 不 均 匀 性 最 小 为 综 合 优 化 目 标 的 多 目 标 优化模型。车轮转角误差模型通过将摇臂机构拆分的方法得到,悬架与 转 向 杆 系 的 干 涉 模 型 通 过 建 立 转向直拉杆与悬架的空间运动模型得到,左右转向力不均匀性通过计 算 转 向 传 动 机 构 传 动 比 得 到。优 化结果证明,多目标优化方法优于传统优化方法,有利于减小转向轮的 磨 损、改 善 车 辆 的 操 纵 稳 定 性 及 转向轻便性。
11.二 轴 摇 臂 暋12.中 间 拉 杆 暋13.中 间 摇 臂 14.一 轴 转 向 节 臂 暋15.一 轴 直 拉 杆 暋16.中 间 拉 杆
图 1暋 某 8暳4 重 卡 双 前 桥 转 向 系 统
坐 标 原 点o 取 在 一 轴 中 心 线 所 在 垂 直 平 面 、车 架 下 翼面及汽车中心线所在的垂直平面的交点。
0暋 引 言
近年来,受路面 条 件、交 通 法 规 的 限 制,重 卡 车 辆 多 设 计 成 双 前 桥 转 向 形 式 ,由 于 其 结 构 复 杂 、 车 辆 载 重 量 的 增 加 、道 路 条 件 的 多 样 性 ,使 得 转 向 轮的磨损问题异常突出。目前多数企业主要依靠 经验进行 设 计 或 借 助 于 成 熟 的 车 型 参 数 进 行 设 计 ,因 此 ,提 出 一 种 满 足 实 际 工 况 的 多 轴 转 向 系 统 设计方法是我国企业急需解决的问题。
简析汽车起重机双桥转向的摇臂机构
简析汽车起重机双桥转向的摇臂机构1 概述随着国民经济的飞速发展,商用车在汽车市场中所占的比重也越来越大,尤其是重型特种车辆,例如起重机这种特种工程车辆,是国家在大力发展经济中必不可少的一部分。
随着起重机作业环境的多样化,随之而来的是吨位的增加,车身变得更长、更宽,甚至越来越多轴化。
在这种时代背景下,如何提高车辆在过弯时候的稳定性并减少轮胎的磨损量已经成为起重机在设计时不得不考虑的部分。
起重机的转向系统中,使用的是梯形转向系统,这种情况下,如果转向杆设计不合理会造成轮胎的非正常磨损,使得整个转向杆系的受力变大,损害车辆的转向性能和车辆行驶的安全性。
而影响整个转向系统的关键是摇臂机构,以往很多文献皆采用分块方法对其独立分析来研究它的性能,使得精度较低,通用性不强。
参考文献[1]中使用空间几何方法进行数学建模,使用MATLAB工具箱中设立约束进行优化,文中数学模型不精确,结果具有一定的参考意义。
本文主要采用空间坐标变换的方法,对空间坐标使用方向余弦和矢量进行运算并对摇臂机构进行分析,很好地解决了转向摇臂的数学建模和优化分析,具有一定的通用性。
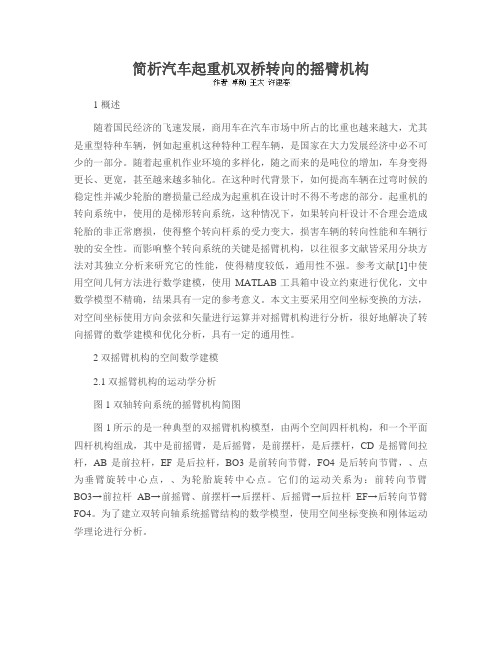
2 双摇臂机构的空间数学建模2.1 双摇臂机构的运动学分析图1 双轴转向系统的摇臂机构简图图1所示的是一种典型的双摇臂机构模型,由两个空间四杆机构,和一个平面四杆机构组成,其中是前摇臂,是后摇臂,是前摆杆,是后摆杆,CD是摇臂间拉杆,AB是前拉杆,EF是后拉杆,BO3是前转向节臂,FO4是后转向节臂,、点为垂臂旋转中心点,、为轮胎旋转中心点。
它们的运动关系为:前转向节臂BO3→前拉杆AB→前摇臂、前摆杆→后摆杆、后摇臂→后拉杆EF→后转向节臂FO4。
为了建立双转向轴系统摇臂结构的数学模型,使用空间坐标变换和刚体运动学理论进行分析。
2.2 一轴内轮转角与垂臂O1AC摆角的传动关系及总传动关系式车轮转向角度是由多个转动效应叠加而成的,其中包括转向轮外倾角、主销后倾角、主销内倾角以及主销转角。
双前桥载货汽车第二前桥内轮转角优化设计

124AUTO TIMEAUTOMOBILE DESIGN | 汽车设计1 引言双前桥载货汽车因具有良好的行驶操作稳定性和制动稳定性,在快寄物流业大力发展的当下,成本低适宜拉飘货的双前桥载货汽车越来越被用户青睐。
为避免拖磨吃胎、降低油耗,寻求一种方法来提高双前桥载货汽车第一前桥总成和第二前桥总成同步协调转向,成为车桥研发工程师和整车设计工程师持续改善的课题。
本文首先对双前桥内轮转向角关系进行了分析、说明,然后通过分析各轮转向角影响因素,确定第二前桥总成转向角精度的保证措施,并予以说明。
最后通过实例对6X2载货汽车匹配的双前桥内轮转角与保证措施的最优匹配进行计算说明,达到减小第二前桥实际内轮转向角与理论转向角误差的目的。
2 双前桥内轮转角关系根据双前桥内轮转角与整车结构关系图1可知。
杨万杰 孙艳 孔德利 王海澎诸城市义和车桥有限公司 山东省诸城市 262200摘 要: 理论分析双前桥载货汽车第一前桥总成、第二前桥总成转向关系,确定双前桥内轮转角的总传动比的定义,然后计算各转向角理论状态下的总传动比,与车辆转向系统设计的总传动比进行比对,明确在各转向状态下的最优传动比。
达到在任一转向状态下,第一前桥、第二前桥可最大限度绕同一旋转中心协调转向,避免了前桥总成拖磨吃胎,降低了油耗。
关键词:双前桥总成 内轮转角 优化设计 传动比Optimization Design for Second Front Axle Inner Steering Angle of Double Front Axles TruckYang Wanjie ,Sun yan ,Kong Deli ,Wang HaipengAbstract :T he steering relationship between the first front axle assembly and the second front axle assembly of the double front axle truck is analyzed theoretically, the definition of the total transmission ratio of the wheel angle in the double front axle is determined, and then the total transmission ratio of each steering angle in the theoretical state is calculated and compared with the total transmission ratio of the vehicle steering system design, so as to clarify the optimal transmission ratio in each steering state. In any steering state, the first front axle and the second front axle can coordinate the steering around the same rotation center to the greatest extent, avoiding the front axle assembly from dragging and eating tires, and reducing fuel consumption.Key words :d ouble front axle assembly, inner wheel corner, optimization design, ratio of transition 双前桥载货汽车第二前桥内轮转角优化设计图1 双前桥内轮转向角关系图β2β2L 1B2B1第一前桥中心第二前桥中心B MRnR nR nabLβ1β1AUTO TIME125AUTOMOBILE DESIGN | 汽车设计时代汽车 如不考虑弹性轮胎侧偏,四轮理论转向角每一瞬时都应绕同一中心点旋转,且存在如下关系: (1) (2)式中:β1—第一桥内轮转角;β2—第二桥内轮转角;a—第一桥转β1至时,转向臂球头中心到前桥中心线距离;b—第二桥转β2至时,转向臂球头中心到前桥中心线距离;β1的每个瞬时转向角都有一个对应的a;β2的每个瞬时转向角都有一个对应的b。
商用车转向拉杆系统运动分析

商用车转向拉杆系统运动分析
张忠雷;刘杰;王斐;李永凯;王伟
【期刊名称】《重型汽车》
【年(卷),期】2022()3
【摘 要】商用车转向系统设计需分析转向拉杆系统的运动,确定垂臂的初始角度,保
证方向盘从中间位置向左、右转动时圈数尽可能一致;确定垂臂的长度,车轮上下跳
动时,保证拉杆系统与悬架导向杆系的干涉量较小;计算转向拉杆系统的传动比,保证
转向机的最大输出力矩满足要求。文章从理论计算入手,深入分析转向拉杆系统设
计流程、垂臂初始角确定、传动比的计算、跳动干涉量计算等方面,揭示了转向系
统设计原理,可供设计人员借鉴。
【总页数】3页(P28-30)
【作 者】张忠雷;刘杰;王斐;李永凯;王伟
【作者单位】东风商用车技术中心
【正文语种】中 文
【中图分类】U46
【相关文献】
1.双前桥商用车转向拉杆在线装调及侧滑检测系统研制2.某商用车转向直拉杆失稳
弯曲变形分析3.基于MATLAB的重型商用车转向轮摆振运动分析及优化4.商用车
用复合材料转向横拉杆设计及制造5.基于ADAMS的某双转向商用车转向过渡拉
杆受力仿真计算
因版权原因,仅展示原文概要,查看原文内容请购买
基于ADAMS重型汽车双前桥转向系统动力学仿真

汽车科 技第3 00 月 期21年5
宰向系统动力学伤真 专
陈 娜, 王 磊, 章 适
( 肥 工 业 大 学 机 械 与 汽 车工 程 学 院 , 肥 2 0 0 合 合 3 0 9)
摘 要: 随着 市 场 的发 展 , 前桥 转 向汽 车 在 载 货 车 中 的 比重 越 来 越 大 , 了保 证 汽 车 的 行 驶 安 全性 能 , 双 为 汽车 在 使 用 时
Abs r t W ih t v lp e to h ma k t d ub e— rnt xe see n e il o a n d a n r a i op rin o tac t he de eo m n ft e r e , o l fo —a l t r g v h ce c nti e n i c e sng pr o t f i o
a t o n lz d t o c fc n cin p i sdu i g i e o d a d f l o d. u h ra ay e he fr e o o ne t ont rn dl-la n ul a o —l Ke y wor s: d ADAM S: u e r n —a l dy a c se rng s se do bl—fo t xe; n mi s;te i y t m
近年 来 , 满 足 市场 的需 求 , 提 升 装载 量 , 为 要 同 时要满 足法 规要 求 . 因此 。 内 各 大 卡 车 生 产 厂 家 纷 国 纷 推 出 了双 前 桥 载 货 车 双 前 桥 载 货 车 转 向 时 两 个
来 非 常大 的计 算 量 . 同时 也 会 产 生 很 大 的误 差 , 笔 者 查 阅 了 大量 资 料 . 在 研 究 相 关论 文 的 基 础 并
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重型汽车双前桥转向运动学分析
1引言
重型汽车双前桥是一种较为复杂的结构,为了保证其良好的转向性能,减少轮胎磨损必
须使各转向轮转向时尽量处于纯滚动状态。本文在分析双前桥各轮运动关系和悬架与转向机
构的干涉的基础上,根据双桥转向机构由多杆件组成的特点,运用实际车型的关键尺寸在
ADAMS软件的wiev模块中建立了近似于原车的运动学模型,并运用该虚拟样车进行了实
车分析。
2转向运动学分析
双前桥机构除了需要符合一般转向机构的要求,由于其自身结构的特殊性还会有一些特
殊的规定:
2.1 转向轮理想运动关系
为了保证各转向轮转向时都作纯滚动,同一轴上的转向轮左转向角应满足阿克曼定律式
(1)、(2);同时第一、二前桥已有的转向轮转向运动应满足运动协调关系(3)式;其转角
关系如图1所示:
111LBCtgCtg (1)
2
22
L
B
CtgCtg
(2)
21212
1
tgtgtgtgL
L
(3)
式中:1、2—第一、二桥左轮转角;
1
、2—第一、二桥右轮转角;
1
L
—第一桥轴线至第三、四桥轴线的距离;
2
L
—第二桥轴线至第三、四桥轴线的距离;
图1 双前桥的转角关系
2.2 转向系统与悬架干涉
双前桥转向系统中各桥的转向纵拉杆与桥的悬架运动干涉如图2所示。图2中A1是转
向节与纵拉杆连接点,B1是纵拉杆与转向摆臂连接点,O1为悬架的前吊悬点,B1A1为纵拉
杆,fd为悬架动扰度。A1一方面围绕悬架中的O2点沿'JJ轨迹运动;另一方面绕B1点沿'KK
KJ
H
G
N
A
1
C
J
/
H
/
K/N
/
O
2
O
3
B
1
e
/
2
L /4
e
O
1
G
/
f
d
f
d
图2 转向传动机构运动校核图
运动,特别是悬架变形到极限位置动扰度fd时,轨迹运动干涉最大,只有两轨迹完全重合时
才无干涉运动。
3模型建立
3.1 物理样机的传动关系
这里考虑的转向是在原地给方向盘一个转角输入,通过转向传动机构,使转向轮按照要
求转向。具体情况和简化流程图如下:
方向盘角输入
转向垂臂的摆动
转向器
转向直拉杆的前后运动
杆件的前后平移运动
第一桥摆臂的前后运动
联动杆的前后运动
第一桥转向节臂绕主销转动
第一桥转向节绕主销转动
第二桥……
第一桥转向轮绕主销转动
简化
图3 双前桥转向传动关系
3.2转向系与悬架的运动干涉在虚拟样机中的处理
图4是转向系与悬架的运动干涉在虚拟样机中的处理:总坐标是指模型坐标。
C点绕O1运动
C与A1的相对关系
根据O1求出O2的位置O2A1的长度
A1绕O2运动
A1绕B1运动
B1、A1标记可表示
B1A1长度可以求出
求出初始位置时O2A1、B1A1在总坐标Y轴上分量的差值δ
0
求出任意位置的
δ
i
δi-δ0就是
干涉量
前轮阶跃f
d
转向
图4 转向系与悬架的运动干涉
3.3建立虚拟样机模型
3.3.1虚拟样机建模前处理:
⑴ 简化零件外形,忽略质量、质心位置、惯性等。根据双前桥结构特点,其大部分零件用
杆件来代替。
⑵ 保证零件的空间相对位置和零件之间的连接属性必须与物理样机相同。
3.3.1虚拟样机建模过程:
⑴ 利用ADAMS某些模块强大的建摸功能,在ADAMS/car模块中,根据几何尺寸和结构
参数建立双前桥操纵机构steering template、车架机构body template、车轮机构模块wheel
template。
⑵ 利用ADAMS/view的完善的仿真结果后处理、参数化分析功能,将在上述两个特殊模块
中建构的模型导入Aview,装配成实验子系统subsystem后,根据各个templates之间的传动
关系添加运动副。
⑶ 在各个关键系统装配好之后,从方向盘输入角位移。以下是重卡双前桥转向与行驶系统
模型。
图5 双前桥的转向与行驶系统模型
3.3 运动性能仿真
转向性能要求的描述多是隐式的,需要经过进一步的分析表述成虚拟样机能够检验的形
式。
⑴ 转向梯形机构性能
)(111LBctgarcctg
(4)
)(222LBctgarcctg
(5)
其中B、1L、2L的值由汽车的总体设计决定。
⑵ 双摆臂与第二桥转向梯形机构综合性能
)(1212ctgLLarctg
(6)
)(21212LBctgLLarctg
(7)
验证就是根据虚拟模型里给定的1,按照上面的关系式求出与1相对应的2、1、
2
的理想值;然后通过虚拟样测出在模型中的2、1、2;并将2、1、2在虚拟样机
中的理想值和实际值作比较。(4)表示第一桥转向梯形性能,(5)表示第二桥转向梯形性能;
(6)表示第一、二桥左轮转向的关系,能够反映转向双摇臂的性能。(7)表示第一桥左轮
与第二桥右轮的关系,能够反映转向双摇臂与第二桥转向梯形的性能。
转向系统与悬架干涉的验证方法如下:
当车轮不转向且前轮又不跳动时,轨迹偏差为零,也就是轨迹线'JJ、'KK的交点转向
节臂销A1的位置,所以A1点的位置可以在静止状态下测出。O2点的确定首先要确定O1点,
O1点的确定见[4]。
4实验结果与结论
应用双前桥重型汽车用该虚拟样机模型验证结果:
图6 第一桥左转弯转向梯形性能
图7 第二桥左转弯转向梯形性能
图8转向双摇臂性能
图9 双桥综合性能
图10 第一桥悬架干涉量
图11 第二桥悬架干涉量
图6、7为一二两桥的转向梯形性能比较图,从图中可以看出实际曲线与理想曲线较为
吻合,两者相差最大不超过1o,由此可见该转向梯形的设计较为合理。
图8为转向双摇臂性能图。测试值是在综合前后过渡摆臂以及联动杆等因素的实际值,
较之与理想曲线,两者变化曲线稍有分离,但总体趋势一样,并且最大差值为2o,原设计
在合理范围。
图9为双桥综合性能图。该图显示实际值与理想值最大差值不大于2o,说明设计基本
合理。
在图10、11中出现干涉量变化曲线在钢板弹簧变化量70mm处开始有微小震荡现象,
是由ADAMS模型中的等效钢板弹簧存在少量的误差引起,但不影响干涉量的分析。
图10、11分别为第一、二桥悬架干涉量变化曲线。由该图可看出悬架与转向系的运动
干涉量在合理范围内,汽车空载时钢板弹簧变化量为34mm,相应的干涉量为3mm,满载
时钢板弹簧变化量为59mm,相应的干涉量为8mm,这都是非常微小的干涉。即使在最大
变形fd处,干涉量也不大于35mm。
在ADAMS模型里分别对第一、二桥得直拉杆的前端点,即图2中的B1点的位置进行
小范围改动,经过仿真后的所得的干涉量均大于原干涉量。所以可以认为原车型的干涉极为
理想。