HS0038
空调遥控器接收电路原理及维修方法-设计应用

空调遥控器接收电路原理及维修方法-设计应用在空调整机上,常用到遥控接收电路接收遥控信号,下面根据常用遥控接收电路介绍其工作原理及注意事项。
1、工作原理简介遥控接收头REC1内部含光敏元件,通过接收窗口接收某一频率范围的红外线。
当光敏元件接收到相应频率的红外线,产生电流,经I-V电路转换为电压,滤波后,经比较器输出脉冲电压,再经内部三极管电平转换,输出脉冲信号送主芯片处理。
遥控接收头对光信号的敏感区由于开窗位置不同有所不同,且不同角度和距离其接收效果也有所不同,一般来讲,光源与遥控接收头接收面角度越接近直角,接收效果越好。
接收距离一般大于7米。
2、各元器件作用及注意事项2.1、遥控接收头REC1实现光电转换,将确定波长的光信号转换为可检测的电信号,因此又叫光电转换器;美的目前选用VISHY(德律风根)HS0038A2两种规格,对应的发射管(遥控器)发射波长一般要求为If=20mA,峰值波长940nm。
由于接收头接受的是红外光波,因此其周围的光源、热源,节能灯、日光灯及发射相近频率的电视机遥控器等都有可能干扰空调器的正常工作。
2.2、限流电阻R19限制输入遥控接收头的电流; 2.3、电解电容E7稳定遥控接收头输入电压;2.4、瓷片电容C11滤除电源高频干扰;2.5、R20和C10组成滤波电路,对输入芯片信号进行滤波。
该电路容易出问题的是C10、C11电容和HS0038A2接收头,原因是受潮后产生微短路,导致接收失灵。
解决办法很简单-吹干或换板。
空调遥控接收头如何检测及更换同型号的怎么拆怎么接,其他的拆机件或通用型就要测量区分脚位了。
下面是我收集的一些资料,希望能帮到你。
用指针式万用表(数字表不适用)电阻挡R*100),先测量确定接地脚,一般接地脚与屏蔽外壳是相通的,余下的两只脚假设为a和b,然后用黑表笔搭接地脚,用红表笔去测a或b脚的阻值,读数分别约为6kΩ和8kΩ(有的接收头相差在1kΩ左右);调换表笔,红表笔接地,黑表笔测a和b脚,读数分别约为20kΩ和40kΩ。
基于单片机简易智能机器人设计

基于单片机的简易智能机器人设计中图分类号:tp242 文献标识:a 文章编号:1009-4202(2010)09-234-02摘要随着微电子技术的不断发展,微处理器的集成程度越来越高,单片机将计算机技术与控制技术融合起来,可研制出一些具有特殊功能的简易智能机器人。
本设计提出一种简易机器人的设计,采用51单片机为控制核心,控制电机运行的速度和方向,从而实现寻迹和避障功能,电路结构简单,可靠性能高。
关键词单片机机器人寻迹避障机器人技术作为20世纪人类最伟大的发明之一,自60年代初问世以来,经历50年的发展已取得长足的进步。
目前全世界机器人的保有量超过100万台,并以每年10万台的速度在增长。
机器人以从单一的工业应用发展到许多领域:如军用、探险、医疗、服务等工业机器人已成为制造业中不可少的核心装备,与人们并肩在各条生产线上。
特种机器人作为机器人家族的后起之秀,而且正以飞快的速度向实用化迈进。
随着微电子技术和半导体技术的进步,单片机的应用已渗透到各个领域,如各种设备的自动控制、智能机器人、智能家居、智能仪器仪表、医疗器械、交通信号控制、汽车电子控制、导弹导航、智能武器等。
据报道:20世纪90年代初期,美国家庭平均拥有64个单片机,到2000年该拥有量已增至226个。
可见单片机的应用前景广泛。
由单片机组建的简易机器人结构相对简单,价格便宜。
一般分为控制与机械两大部分。
机械包括机体结构、动力装置、传动机构和执行机构等;控制包括单片机系统及其软件、传感器及其电路、控制驱动电路等。
本设计提出一种简易机器人的设计,主体机械部分设计成小车的模型,控制部分采用51单片机为控制核心,通过外加传感器检测路面信息,利用脉宽调制技术控制电机的转向和转速,实现避障和寻迹功能,电路结构简单,可靠性能高。
p0口用于数码管显示,p1口用于电动机的pwm驱动控制,p2,p3口用于传感器的数据采集与中断控制。
这样做的优点是:充分利用了单片机的内部资源,降低了总体设计的成本。
基于单片机的智能小车的设计毕业论文总
基于单片机的智能小车的设计-毕业论文-总————————————————————————————————作者:————————————————————————————————日期:基于单片机的智能小车的设计摘要单片机作为一种微型控制器,自走入人们的视野以来,就随着科技进步不断地更新换代。
它能够将计算机所有关键的零件整合集中在一块芯片上,并且具有强大的计数功能,以及各种必要的接口,因此单片机在自动控制系统中通常处于核心地位。
本文对于智能小车的设计思路就应用了最常见的AT89S51单片机作控制处理器,该单片机在低功率的基础上,能够保持其性能在一个较高的水平上,且其8K的处理器够灵巧,适用于嵌入式产品,在众多单片机中,表现较为优秀。
本设计是在单片机的基础上实施的,兼具数据处理、即时调控和报警提醒功能,小车接到行驶指令后,红外探头会检测路况信息(是否处在黑线路径范围内)并反馈给单片机处理,单片机判断后作出相应指令,由电机驱动使小车执行相应行驶动作。
单片机与系统的配合使智能小车的行驶保持灵敏迅速的状态。
关键词:单片机寻迹报警红外线电机驱动AbstractWith the rapid development of science and technology in recent years,SCM applications arecontinually deepen ing.Traditionalcontroltest drive at the same ti me, the rapidly growing update. In real-timedetect ionandcontrolof the microcomputer application system,the microcontrolleris oftenused asacore component.SCM is the main featureint egrated computer chip ina micro-computer. Itis a setof multi-counting and the interface in oneof the micro-controller. The 51 single-chip microcontroll eris the mosttypical andmost representative one.Thedesignof the mainapplicationAT89S51asthecontrol,anddisplaydriverintegratedcircuit sand other systems.Based on single chipdesign.MCUAT89S51 using the controlleras an alarm device that can givefull playto AT89S51ofdata processing and real-time control functions.Make the system work in the bestcondition,improvethesystem sensit ivity.Whentwo signal driven forward bycar tracing module,theinfrares onwhether to producelevel signalsthrough the black,retutn again according to requirement ofdesign procedure of judgment for motor drivermodule,itcontrolsthe car turning back forward ofrunning onthe blackline.Keywords:SCM,Tracing, Alarm device,Levelsignals,Motor driver module目录摘要ﻩ错误!未定义书签。
单片机红外接受发送实验报告

单片机红外发射与接收实验报告指导老师:报告人:一·实验选题:基于单片机的红外发射与接收设计任务要求:设计一个以单片机为核心控制器件的红外收发系统。
发射载频:38KHz工作温度:-40℃--+85℃接收范围:2m二·系统概述方案设计与论证红外遥控收发系统(以下简称红外遥控系统)是指利用红外光波作为信息传输的媒介以实现远距离控制的装置。
从实际系统的硬件结构看,红外遥控系统包括发射装置和接收装置,其中发射装置包括电源模块、输入模块、红外发射模块和单片机最小系统,接收装置包括电源模块、红外接收模块、输出模块和单片机最小系统。
本设计选题设计任务要求设计一个以单片机为核心控制器件的红外收发系统。
其中,发射载波 38KHz,电源 5V/0.2A 5V/0.1A,工作温度-40℃--+85℃,接收范围 2m,传输速率 27bit/s,反应时间 2ms。
利用单片机的定时功能或使用载波发生器(用于产生载波的芯片)均可产生 38KHz 的发射载波。
单片机系统可以直接由 5V/0.1A 的电源供电,也可以通过三端稳压芯片由 9V/0.2A 电源供电。
采用工业级单片机可以工作在-40℃--+85℃。
为保证接收范围达到 2m,在发射载频恒为 38KHz 的前提下,应采用电流放大电路使红外发射管发射功率足够大。
传输速率和反应时间取决于所使用的编码芯片或程序的执行效率。
通过上述分析可知,为实现设计任务并满足设计指标,应采用工业级单片机,由电流放大电路驱动红外发射管。
将针对设计任务提出两种设计方案。
三·程序功能将程序编译通过并下载成功后,两个板上的红外光电器件都要套上黑色遮光罩,就可以进行实验了。
测距实验:手持1号板和2号板,两管相对,慢慢拉远或移近两管的距离,观察LED的读数变化。
阻断实验:可请另一人协助,将一张纸或其他障碍物放在两管之间再拿开,会看到读数有大幅度的变化。
反射实验:将1号和2号实验板并排拿在手中,并形成一个小夹角,向一张白纸移动观察读数变化。
基于单片机的红外遥控智能调光调速器的设计_张国良

图5 程序流程图
4 结论 红外遥控调光电路的关键是红外遥控的解码, 发射时利用现有的电视机万能遥控,使其有了第二 功能。在解码红外信号上,应用了脉冲位置调制 (PPM)法。即采集其高低电平宽度的方法,可以还 原出信号的各个编码,简化了电路。同时,采用了 专用调光调速芯片来控制负载,增强了系统功能、 并且能安全、可靠地工作。本设计非常简单的实现了 红外遥控信号解码,完成了无级调光与调速功能, 效果令人满意。制作好的电路见图6、图7。
0 引言 电子遥控技术已经十分成熟了,它能为我们的 生活带来方便。在我们日常生活中,处处都可以见 到它的影子。比如:在小汽车上,有遥控电子锁。 遥控玩具、空调与电视机也用到了遥控。常见的遥 控,一是无线遥控,二是红外遥控。红外是一种不 可见光,它介于可见光和微波之间,既有可见光的 性质,如:直线传播、反射、折射等,又具有微波 的一些特性,如穿透力强。红外线遥控是目前使用 最广泛的一种遥控手段。由于红外线遥控装置具有 体积小、功耗低、功能强、成本低等特点,因而, 继彩电、录像机之后,在录音机、音响设备、空调 机以及玩具等其它小型电器装置上也纷纷采用红外 线遥控。工业设备中,在高压、辐射、有毒气体、 粉尘等环境下,采用红外线遥控不仅安全可靠而且 能有效地隔离电气干扰。 借助于红外线具有的上述特性。利用红外传感器 具有灵敏度高、响应速度快和光谱范围窄的特点, 同时利用单片机结构紧凑、可靠性高、数据处理能力 强、速度快、功耗小、成本低的特点、可以制作灵敏 度高、抗干扰能力强、性能优良的红外遥控装置。 1 红外遥控原理 通用的红外遥控系统由发射和接收两大部分组 成。应用编/解码专用集成电路芯片来进行控制操作,
电子技术设计与应用 Electronics Design & Application
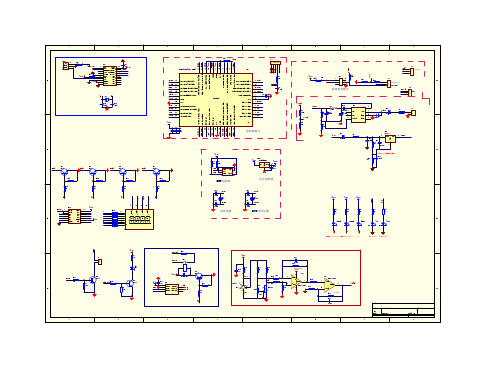
温度传感器电路原理图
1
C
1 U13 5 4
IN
GND
R14 10K Q1 9013 Q2 9013 Q3 9013 Q4 9013
R15 10K
U12 +3.3V ISL60002
OUT
DIG1
DIG2
DIG3
DIG4
SCL SDL
1 2 3
SCL VSS SDA
WP VCC
M-24LC08BT-I/OT R37 4.7K R36 1K R39 4.7K R38 1K R41 4.7K R40 1K R42 1K C14 OSCI K1 K2 K3 K4 20PF Y1 8M C15 OSCO 12 9 8 6 20PF 20PF U10 DATA a b c d 1 2 3 4 5 6 7 DSA DSB Q0 Q1 Q2 Q3 GND 74HC164 VCC Q7 Q6 Q5 Q4 MR CP 14 13 12 11 10 9 8 dp g f e CLK +3.3V +3.3V DIG 1 DIG2 DIG3 a b c d e f g dp R150 R2 R3 50 R4 50 R5 50 R6 50 R7 50 R8 50 50 11 7 4 2 1 10 5 3 a b c d e f g dp U9 LED1 LED2 LED3 DIG4 C7 SOSCO 20PF VOUT +3.3V R55 3K R56 1K Y3 32.768 +3.3V +3.3V +3.3V DIG1 a f e g d bf ce dp DIG2 a g d bf ce dp DIG3 a g d bf ce dp DIG4 a g d b c dp D7 D8 SET-R STATE ERR +8V +3.3V B C6 SOSCI R43 4.7K
小车摘要
摘要: 本系统采用AT89C2051为中心控制器,实现电动车的智能控制功能。整个电动车智能控制系统包括:红外传感系统系统,单片机主控制系统,报警施动系统三大部分。红外传感系统系统是用来检测红外信号,从而驱动单片机主控制系统。单片机主控制系统的功能主要是启动电动车、计时行驶时间、改变行驶方向,报警施动系统将单片机主控制系统的驱动信号放大,从而驱动音乐芯片及电动机使小车运行并发出报警音。
工作原理: IC1是红外接收头,平时IC1的脚输出高电平,当接收到来自遥控器的红外信号时,脚输出低电平。这里不采用代码识别。刚接通电源时,红外接收头脚输出高电平,BG1饱和导通,通过单片机检测P3.4的电平为低,则P1.0、P1.1、P1.2不输出电平,这时小车停止不动。控一下遥控器,红外接收头便接收到红外线遥控信号其脚输出信号为低电平,BG1截止,则P3.4为高电平。经检测主控制系统作出反应:P1.0被置高,经放大,驱动音乐芯片及电动机M1,这时电动机M1正转,小车前进。再按一下遥控器。主控制系统,检测P3.4口第二次为高电平,则P1.1被置高,经放大,驱动音乐芯片及电动机M1,这时电动机M1反转,小车后退。第三次按遥控器时主控制系统,检测P3.4口第三次为高电平,则P1.2被置高,经放大,驱动音乐芯片及电动机M2
元件选择: 小车为普通玩具车。 元件名称 个数 HS0038红外一体接收头 1 AT89C2051 1 KD-9561音乐集成模块 2 扬声器8Ω0.5W 1 碳膜电阻1K 6 碳膜电阻2.7K 1 碳膜电阻56K 1 碳膜电阻100Ω 1 碳膜电阻470Ω 4 电解电容100μF 5 ??碳膜电容0.1μF 2 碳膜电容30pF 2 二极管 4 三极管9013 8 三极管8550 9 干电池 4 石英晶振12M 1 集成稳压器 1 电动小车 1 制作体会: 经过一个月多来的设计,感触颇深的是解决问题的方法、技巧。在这一个月中,我们遇到许许多多问题,对待问题要多方法处理,多角度处理。通过这一个月多的设计竞赛,我们不但增强了实践能力和协作精神,而且懂得了联系实际的重要性,这对我们以后的学习和工作不无裨益。当然,我们的设计还存在着一些缺陷,有待于在将来设计中进一步提高,在此恳请各位老师批评指正。
stm32硬件电路设计
本节将向大家介绍ALIENTEK MiniSTM32开发板的各部分硬件,让大家对该开发板的各部分硬件原理有个理解。
1.2.1 MCUALIENTEK MiniSTM32选择的是STM32F103RBT6作为MCU,STM32F103的型号众多,我们选择这款的原因是看重其性价比,作为一款低端开发板,选择STM32F103RBT6是最佳的选择。
128K FLASH、20K SRAM、2个SPI、3个串口、1个USB、1个CAN、2个12位的ADC、RTC、51个可用IO脚…,这样的配置无论放到哪里都是很不错的了,更重要的是其价格,18元左右的零售价,足以秒杀很多其他芯片了,所以我们选择了它作为我们的主芯片。
MCU部分原理图如下:图1.2.1.1 MCU部分原理图上图中中上部的BOOT1用于设置STM32的启动方式,其对应启动模式如下表所示:表1.2.1.1 BOOT0、BOOT1启动模式表我们用串口下载代码,则配置BOOT0为1,BOOT1为0即可,如果想让STM32一按复位键就开始跑代码,则需要配置BOOT0为0,BOOT1随便设置都可以。
P3和P1分别用于PORTA和PORTB的IO口引出,其中P2还有部分用于PORTC口的引出。
PORTA和PORTB都是按顺序排列的,这样设计的目的是为了让大家更方便地与外部设备连接。
P2连接了DS18B20的数据口以及红外传感器的数据线,它们分别对应着PA0和PA1,只需要通过跳线帽将P2和P3连接起来就可以使用了。
这里不直接连在一起的原因有二:1,防止红外传感器和DS18B20对这两个IO口作为其他功能使用的时候的影响;2,DS18B20和红外传感器还可以用来给其他板子提供输入,等于我们的板子为别的板子提供了红外接口和温度传感器,在调试的时候,还是蛮有用的。
P4口连接了PL2303的串口输出,对应着STM32的串口1(PA9/PA10),在使用的时候,也是通过跳线帽将这两处连接起来。
(完整版)基于51单片机的红外遥控器解码设计毕业论文
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
单片机红外接受发送实验报告(可编辑)
单片机红外接受发送实验报告单片机红外发射与接收实验报告指导老师报告人一·实验选题基于单片机的设计任务要求设计一个以单片机为核心控制器件的红外收发系统发射载频38KHz 工作温度-40--85℃接收范围2m系统概述方案设计与论证红外遥控收发系统以下简称红外遥控系统是指利用红外光波作为信息传输的媒介以实现远距离控制的装置从实际系统的硬件结构看红外遥控系统包括发射装置和接收装置其中发射装置包括电源模块输入模块红外发射模块和单片机最小系统接收装置包括电源模块红外接收模块输出模块和单片机最小系统本设计选题设计任务要求设计一个以单片机为核心控制器件的红外收发系统其中发射载波 38KHz电源 V02A 5V01A工作温度-40--85℃接收范围 2m传输速率 27bits反应时间 2ms 利用单片机的定时功能或使用载波发生器用于产生载波的芯片均可产生 38KHz 的发射载波单片机系统可以直接由 5V01A 的电源供电也可以通过三端稳压芯片由 9V02A 电源供电采用工业级单片机可以工作在-40--85℃为保证接收范围达到 2m在发射载频恒为 38KHz 的前提下应采用电流放大电路使红外发射管发射功率足够大传输速率和反应时间取决于所使用的编码芯片或程序的执行效率通过上述分析可知为实现设计任务并满足设计指标应采用工业级单片机由电流放大电路驱动红外发射管针对设计任务提出设计方案程序功能将程序编译通过并下载成功后两个板上的红外光电器件都要套上黑色遮光罩就可以进行实验了测距实验手持号板和号板两管相对慢慢拉远或移近两管的距离观察LED的读数变化阻断实验可请另一人协助将一张纸或其他障碍物放在两管之间再拿开会看到读数有大幅度的变化反射实验将号和号实验板并排拿在手中并形成一个小夹角向一张白纸移动观察读数变化寻迹实验将白纸的部分区域涂黑让你手中的这对红外发射与接收器件在黑色区域与白色区域之间来回移动观察读数变化另外我们选用的红外接收管灵敏很高对室内散射光计算机显示器的辐射日光灯管甚至冬天的暖气等都有感应实验时要注意这些因素的干扰注意实验场地要适当遮光不要有直射光或在窗前进行实验红外线接收模块的原理如下以小型红外接收解调模块SFH506-38超小型红外接收解调模块RPM-638CBR为例来介绍分析一般的红外接收模块主要由CX2016APC1373等集成电路外加阻容元件红外线接收管及滤波光片等组成因而体积较大而新一代一体化红外遥控接收头SFH506-38与RPM-638CBR将红外接收管前置放大解调等电路集成在同一基片上内电路框图如图1所示具有体积小无外部元件抗干扰性能好接收角度宽价格低等优点1小型红外接收解调模块SFH506-38该接收模块采用黑色环氧树脂封装灵敏度较高用小功率红外发射管发射信号接收距离达35米其外型及管脚如图2所示主要电参数如下电源电压VCC为5V 接收峰值波长为095um接收角度为-55度接受距离为35米最大静态电流05mA接收频率为38KHz另有派为3033364056KHz系列供选用2超小型红外接收解调模块RPM-638CBR次模块采用树脂封装有直立与卧式两种封装形式其主要电参数VCC为45--55V静态电流无光照及信号输入Icc为3MA峰值波长为094uM接收最大距离为8--15M水平接收角为33度上下接收角为14度接收频率为38KHz工作温度为-25度----75度由于SFH506-38和RPM-638CBR能直接与红外遥控专用解码电路配合使用因此完全可以取代电视音响等设备中的常规红外接收头且实践证明效果很好红外线接收模块的技术参数1工作电压DC5-20V 可订做范围DC3V-DC24V2静态功耗lt50微安3集电极开路输出负载电流 500mA 其它电流值需订做4延时时间可订做零点几秒几十分钟5封锁时间可订做零点几秒几十秒6触发方式L不可重复触发H可重复触发7感应范围 140度距离5-7米以内 25时8尺寸直径 23mm 默认另有127mm8mm可选9工作温度-20-70℃10外形尺寸2638mm螺丝孔距325mm 注可按客户的各种要求生产模块11感光度可按要求订做 21 红外接收电路一体化的红外接收装置将遥控信号的接收放大检波整形集于一身并且输出可以让单片机识别的TTL 信号这样大大简化了接收电路的复杂程度和电路的设计工作方便使用在本系统中我们采用红外一体化接收头HS0038外观图如图 3 所示HS0038 黑色环氧树脂封装不受日光荧光灯等光源干扰内附磁屏蔽功耗低灵敏度高在用小功率发射管发射信号情况下其接收距离可达35m它能与TTLCOMS 电路兼容HS0038 为直立侧面收光型它接收红外信号频率为38 kHz周期约26 μs同时能对信号进行放大检波整形得到TTL 电平的编码信号三个管脚分别是地+5 V 电源解调信号输出端红外一体化接收头的测试可以利用图4 所示的电路进行在HS0038 的电源端与信号输出端之间接上一只二极管及一只发光二极管后再配上规定的工作电源为+5V当手拿遥控器对着接收头按任意键时发光二极管会闪烁说明红外接收头和遥控器工作都正常如果发光二极管不闪烁发光说明红外接收头和遥控器至少有一个损坏只要确保遥控器工作正常很容易判断红外接收头的优劣HS0038的内部结构1PINPIN光敏二极管光敏二极管工作时加有反向电压没有光照时其反向电阻很大只有很微弱的反向饱和电流暗电池当有光照时就会产生很大的反向电流亮电流光照越强该亮电流就越大光敏二极管是一种光电转换二极管所以又叫光电二极管PN结光敏二极管由于相应速度慢不能再通信系统中得到应用PIN光敏二极管就是在PN结中间夹入一层轻掺杂本征半导体PIN光敏二极管特点响应时间短暗电流小入射光量与输出电流的直线性良好PIN光敏二极管的主要用途遥控传真机光通信短距离2AGC Automatic Gain Control 自动增益控制放大器增益表示放大器功率放大倍数以输出功率同输入功率比值的常用对数表示单位为分贝它是输出限幅装置的一种是利用线性放大和压缩放大的有效组合对输出信号进行调整当输入信号较弱时线性放大电路工作保证输出信号的强度当输入信号强度达到一定程度时启动压缩放大线路使输出幅度降低满足了对输入信号进行衰减的需要也就是说AGC功能可以通过改变输入输出压缩比例自动控制增益的幅度它能够在输入信号幅度变化很大的情况下使输出信号幅度保持恒定或仅在较小范围内变化不至于因为输入信号太小而无法正常工作也不至于因为输入信号太大而使接收机发生饱和或堵塞3Band Passband-pass filter 带通滤波器带通滤波器是指能通过某一频率范围内的频率分量但将其他范围的频率分量衰减到极低水平的滤波器4Demodulator解调器解调是将模拟信号- 数字信号HS0038参考电路在实际的应用中可以参考以下电路进行电路原理图的设计TSAL62是指红外发射头TSAL6200uc是指微控制器HS0038对数据格式的要求 The data signal should fullfill the following condition载波频率接近38kHz1要求脉冲的长度不小于10个周期2脉冲之间的时间距离不小于14个周期3如果每个脉冲的长度超过18ms那么需要在数据流中添加一些空隙空隙的长度要在脉冲长度的4倍以上4每秒钟可以连续接收800个短脉冲符合数据格式的列子有 Some examples for suitable data format areNEC CodeToshiba Micom Format Sharp Code RC6 Code R–2000 Code等红外通信解调功能从图中我们可以看出HS0038接收到的信号正好与发射信号是不对应的当输出脉冲为高时对应HS0038的低电平也就是说发送的红外信号与接收到的红外信号互为相反hs0038 应用 C51编程五·外围器件一.电阻器简介11 电阻器的含义在电路中对电流有阻碍作用并且造成能量消耗的部分叫电阻12 电阻器的英文缩写RResistor 及排阻RN13 电阻器在电路符号 R14 电阻器的常见单位千欧姆KΩ兆欧姆MΩ15 电阻器的单位换算 1兆欧 103千欧 106欧16 电阻器的特性电阻为线性原件即电阻两端电压与流过电阻的电流成正比通过这段导体的电流强度与这段导体的电阻成反比即欧姆定律I UR 表 17 电阻的作用为分流限流分压偏置滤波与电容器组合使用和阻抗匹配等18 电阻器在电路中用R加数字表示如R15表示编号为15的电阻器19 电阻器的在电路中的参数标注方法有3种即直标法色标法和数标法a直标法是将电阻器的标称值用数字和文字符号直接标在电阻体上其允许偏差则用百分数表示未标偏差值的即为±20b数码标示法主要用于贴片等小体积的电路在三为数码中从左至右第一二位数表示有效数字第三位表示10的倍幂或者用R表示 R表示0 如472 表示 47×102Ω即47KΩ 104则表示100KΩR22表示022Ω 122 1200Ω 12KΩ 1402 14000Ω 14KΩ R22 022Ω 50C 324100 324KΩ17R8 178Ω000 0Ω 0 0Ωc色环标注法使用最多普通的色环电阻器用4环表示精密电阻器用5环表示紧靠电阻体一端头的色环为第一环露着电阻体本色较多的另一端头为末环现举例如下如果色环电阻器用四环表示前面两位数字是有效数字第三位是10的倍幂第四环是色环电阻器的误差范围见图一四色环电阻器普通电阻标称值第一位有效数字标称值第二位有效数字标称值有效数字后0的个数 10的倍幂允许误差颜色第一位有效值第二位有效值倍率允许偏差黑0 0 棕 1 1 ±1 红 2 2 ±2 橙3 3 黄4 4 绿5 5 ±05 蓝6 6 ±025 紫7 7 ±01 灰8 8白9 9 ―20 50 金 5 银10无色20 图1-1 两位有效数字阻值的色环表示法如果色环电阻器用五环表示前面三位数字是有效数字第四位是10的倍幂第五环是色环电阻器的误差范围见图二五色环电阻器精密电阻标称值第一位有效数字标称值第二位有效数字标称值第三位有效数字标称值有效数字后0的个数10的倍幂允许误差颜色第一位有效值第二位有效值第三位有效值倍率允许偏差黑0 0 0 棕 1 1 1 1 红 2 2 22 橙3 3 3 黄4 4 4 绿55 5 05 蓝6 6 6 025 紫7 7 7 01灰8 8 8 白9 9 9 -20~50 金±5 银±10图1-2 三位有效数字阻值的色环表示法110 SMT电阻的尺寸表示用长和宽表示如0201060308051206等具体如02表com111 一般情况下电阻在电路中有两种接法串联接法和并联接法电阻的计算R1 R1 R2R2串连并联R R1R2 R 1R11R2112 多个电阻的串并联的计算方法串联R总串 R1R2R3Rn并联1R总并 1R2R3R1Rn二.电容器1 电容器的含义衡量导体储存电荷能力的物理量2 电容器的英文缩写C capacitor3 电容器在电路中的表示符号 C 或CN 排容4 电容器常见的单位毫法mF微法uF纳法nF皮法pF5 电容器的单位换算 1法拉 103毫法 106微法 109纳法 1012皮法1pf 10-3nf 10-6uf 10-9mf 10-12f6 电容的作用隔直流旁路耦合滤波补偿充放电储能等7 电容器的特性电容器容量的大小就是表示能贮存电能的大小电容对交流信号的阻碍作用称为容抗它与交流信号的频率和电容量有关电容的特性主要是隔直流通交流通低频阻高频8 电容器在电路中一般用C加数字表示如C25表示编号为25的电容9 电容器的识别方法与电阻的识别方法基本相同分直标法色标法和数标法3种a 直标法是将电容的标称值用数字和单位在电容的本体上表示出来如220MF表示220UF01UF表示001UFR56UF表示056UF6n8表示6800PFb 不标单位的数码表示法其中用一位到四位数表示有效数字一般为PF而电解电容其容量则为UF如3表示3PF2200表示2200PFcomFc 数字表示法一般用三为数字表示容量的大小前两位表示有效数字第三位表示10的倍幂如102表示10102 1000PF224表示22104 02UFd 用色环或色点表示电容器的主要参数电容器的色标法与电阻相同电容器偏差标志符号100-0--H100-10--R50-10--T30-10--Q50-20--S80-20--Z10 电容的分类根据极性可分为有极性电容和无极性电容我们常见到的电解电容就是有极性的是有正负极之分11 电容器的主要性能指标是电容的容量即储存电荷的容量耐压值指在额定温度范围内电容能长时间可靠工作的最大直流电压或最大交流电压的有效值耐温值表示电容所能承受的最高工作温度稳压二极管发光二极管光电二极管变容二极管3 半导体二极管在电路中常用加数字表示如D5表示编号为5的B锗二极管在两极加上电压并且电压大于02V时才能导通导通后电压保持在02-03V之间5 半导体二极管主要特性是单向导电性也就是在正向电压的作用下导通电阻很小而在反向电压作用下导通电阻极大或无穷大 7 半导体二极管的识别方法a目视法判断半导体二极管的极性一般在实物的电路图中可以通过眼睛直接看出半导体二极管的正负极在实物中如果看到一端有颜色标示的是负极另外一端是正极b用万用表指针表判断半导体二极管的极性通常选用万用表的欧姆档 R*100或R*1K 然后分别用万用表的两表笔分别出接到二极管的两个极上出当二极管导通测的阻值较小一般几十欧姆至几千欧姆之间这时黑表笔接的是二极管的正极红表笔接的是二极管的负极当测的阻值很大一般为几百至几千欧姆这时黑表笔接的是二极管的负极红表笔接的是二极管的正极 c测试注意事项用数字式万用表去测二极管时红表笔接二极管的正极黑表笔接二极管的负极此时测得的阻值才是二极管的正向导通阻值这与指针式万用表的表笔接法刚好相反变容二极管是根据普通二极管内部 PN结的结电容能随外加反向电压的变化而变化这一原理专门设计出来的一种特殊二极管变容二极管在无绳电话机中主要用在手机或座机的高频调制电路上实现低频信号调制到高频信号上并发射出去在工作状态变容二极管调制电压一般加到负极上使变容二极管的内部结电容容量随调制电压的变化而变化变容二极管发生故障主要表现为漏电或性能变差1发生漏电现象时高频调制电路将不工作或调制性能变差2变容性能变差时高频调制电路的工作不稳定使调制后的高频信号发送到对方被对方接收后产生失真三极管在电路中常用Q加数字表示如Q17表示编号为17的三极管特点三极管简称管是内部含有2个PN结并且具有放大能力的特殊器件它分NPN型和PNP型两种类型这两种类型的三极管从工性上可互相弥补所谓OTL电路中的对管就是由PNP型和NPN型配对使用按材料来分可分硅和锗管我国目前生产的硅管多为NPN型锗管多为PNP型E 发射极 C 集电极 E 发射极 C 集电极B 基极B 基极NPN型三极管 PNP 型三极管4 半导体三极管放大的条件要实现放大作用必须给三极管加合适的电压即管子发射结必须具备正向偏压而集电极必须反向偏压这也是三极管的放大必须具备的外部条件5 半导体三极管的主要参数a 电流放大系数对于三极管的电流分配规律Ie IbIc由于基极电流Ib的变化使集电极电流Ic发生更大的变化即基极电流Ib的微小变化控制了集电极电流较大这就是三极管的电流放大原理即βΔIcΔIbb极间反向电流集电极与基极的反向饱和电流c极限参数反向击穿电压集电极最大允许电流集电极最大允许功率损耗6半导体三极管具有三种工作状态放大饱和截止在模拟电路中一般使用放大作用饱和和截止状态一般合用在数字电路中a半导体三极管的三种基本的放大电路共射极放大电路共集电极放大电路共基极放大电路电路形式直流通道静态工作点交流通道微变等效电路ri Rbrbe ro RC RC 用途多级放大电路的中间级输入输出级或缓冲级高频电路或恒流源电路b三极管三种放大电路的区别及判断可以从放大电路中通过交流信号的传输路径来判断没有交流信号通过的极就叫此极为公共极注交流信号从基极输入集电极输出那发射极就叫公共极交流信号从基极输入发射极输出那集电极就叫公共极交流信号从发射极输入集电极输出那基极就叫公共极7 用万用表判断半导体三极管的极性和类型用指针式万用表a先选量程R*100或R*1K档位b判别半导体三极管基极用万用表黑表笔固定三极管的某一个电极红表笔分别接半导体三极管另外两各电极观察指针偏转若两次的测量阻值都大或是都小则改脚所接就是基极两次阻值都小的为NPN型管两次阻值都大的为PNP型管若两次测量阻值一大一小则用黑笔重新固定半导体三极管一个引脚极继续测量直到找到基极c判别半导体三极管的c极和e极确定基极后对于NPN管用万用表两表笔接三极管另外两极交替测量两次若两次测量的结果不相等则其中测得阻值较小得一次黑笔接的是e极红笔接得是c 极若是PNP型管则黑红表笔所接得电极相反d 判别半导体三极管的类型如果已知某个半导体三极管的基极可以用红表笔接基极黑表笔分别测量其另外两个电极引脚如果测得的电阻值很大则该三极管是NPN型半导体三极管如果测量的电阻值都很小则该三极管是PNP型半导体三极管五.PCB的简介1 PCB的英文缩写PCB Printed Circuit Board2 PCB的作用PCB作为一块基板他是装载其它电子元器件的载体所以一块PCB设计的好坏将直接影响到产品质量的好坏3 PCB的分类和常见的规格根据层数可分为单面板双面板和多层板我们主机板常用的是4层板或者6层板而显示卡用的是8层板而主机板的尺寸为AT规格的主机板尺寸一般为13X12 单位为英寸 ATX主机板的尺寸一般为12X96 单位为英寸 Micro Atx主机板尺寸com 单位为英寸注明1英寸 254CM六.晶振1晶振在线路中的符号是”X”Y2晶振的名词解释能产生具有一定幅度及频率波形的振荡器3晶振在线路图中的表示符号4晶振的测量方法测量电阻方法用万用表RX10K档测量石英晶体振荡器的正反com英晶体振荡器有一定的阻值或为零则说明该石英晶体振荡器已漏电或击穿损坏动态测量方法用是波器在电路工作时测量它的实际振荡频是否符合该晶体的额定振荡频率如果是说明该晶振是正常的如果该晶体的额定振荡频率偏低偏高或根本不起振表明该晶振已漏电或击穿损坏七·555定时器555集成时基电路称为集成定时器是一种数字模拟混合型的中规模集成电路其应用十分广泛该电路使用灵活方便只需外接少量的阻容元件就可以构成单稳多谐和施密特触发器因而广泛用于信号的产生变换控制与检测它的内部电压标准使用了三个5K的电阻故取名555电路其电路类型有双极型和CMOS型两大类两者的工作原理和结构相似几乎所有的双极型产品型号最后的三位数码都是555或556所有的CMOS产品型号最后四位数码都是7555或7556两者的逻辑功能和引脚排列完全相同易于互换555和7555是单定时器556和7556是双定时器双极型的电压是5V15V输出的最大电流可达200mACMOS型的电源电压是3V18V 图8-1 555定时器内部框图555电路的工作原理555电路的内部电路方框图如图8-1所示它含有两个电压比较器一个基本RS 触发器一个放电开关T比较器的参考电压由三只5KΩ的电阻器构成分压它们分别使高电平比较器A1同相比较端和低电平比较器A2的反相输入端的参考电平为和A1和A2的输出端控制RS触发器状态和放电管开关状态当输入信号输入并超过时触发器复位555的输出端3脚输出低电平同时放电开关管导通当输入信号自2脚输入并低于时触发器置位555的3脚输出高电平同时放电开关管截止是复位端当其为0时555输出低电平平时该端开路或接VCCVc是控制电压端5脚平时输出作为比较器A1的参考电平当5脚外接一个输入电压即改变了比较器的参考电平从而实现对输出的另一种控制在不接外加电压时通常接一个001uf的电容器到地起滤波作用以消除外来的干扰以确保参考电平的稳定T为放电管当T导通时将给接于脚7的电容器提供低阻放电电路555定时器的典型应用图8-2 555构成单稳态触发器上图8-2为由555定时器和外接定时元件RC 构成的单稳态触发器D为钳位二极管稳态时555电路输入端处于电源电平内部放电开关管T导通输出端Vo输出低电平当有一个外部负脉冲触发信号加到Vi端并使2端电位瞬时低于低电平比较器动作单稳态电路即开始一个稳态过程电容C 开始充电Vc按指数规律增长当Vc充电到时高电平比较器动作比较器A1翻转输出Vo从高电平返回低电平放电开关管T重新导通电容C上的电荷很快经放电开关管放电暂态结束恢复稳定为下个触发脉冲的来到作好准备波形图见图8-3 图8-3 单稳态触发器波形图暂稳态的持续时间Tw即为延时时间决定于外接元件RC的大小Tw 11RC通过改变RC的大小可使延时时间在几个微秒和几十分钟之间变化当这种单稳态电路作为计时器时可直接驱动小型继电器并可采用复位端接地的方法来终止暂态重新计时此外需用一个续流二极管与继电器线圈并接以防继电器线圈反电势损坏内部功率管如图8-4由555定时器和外接元件R1R2C构成多谐振荡器脚2与脚6直接相连电路没有稳态仅存在两个暂稳态电路亦不需要外接触发信号利用电源通过R1R2向C充电以及C通过R2向放电端放电使电路产生振荡电容C在和之间充电和放电从而在输出端得到一系列的矩形波对应的波形如图8-5所示图8-4 555构成多谐振荡器图8-5 多谐振荡器的波形图输出信号的时间参数是 T07R1R2C07R2C其中为VC由上升到所需的时间为电容C放电所需的时间555电路要求R1与R2均应不小于1KΩ但两者之和应不大于33MΩ外部元件的稳定性决定了多谐振荡器的稳定性555定时器配以少量的元件即可获得较高精度的振荡频率和具有较强的功率输出能力因此这种形式的多谐振荡器应用很广3组成占空比可调的多谐振荡器电路如图8-6它比图8-4电路增加了一个电位器和两个引导二极管D1D2用来决定电容充放电电流流经电阻的途径充电时D1导通D2截止放电时D2导通D1截止图8-6 555构成占空比可调的多谐振荡器可见若取电路即可输出占空比为50℅的方波信号图8-7 555构成施密特触发器图8-8 555构成施密特触发器的波形图实现基本和常用逻辑运算的电子电路叫逻辑门电路实现与运算的叫与门实现或运算的叫或门实现非运算的叫非门也叫做反相器等等用逻辑1表示高电平用逻辑0表示低电平2 与门逻辑表达式F=A B。