感知机的实验报告
数据库系统原理课程设计 感知机
数据库系统原理课程设计感知机感知机(Perceptron)是一种二分类的线性分类模型,是神经网络的一种简单形式。
它由Hebb在1949年所引入,是机器学习领域中的重要算法之一、感知机的基本思想是构建一个由多个神经元组成的网络,每个神经元接收一定数量的输入量,然后根据一定的规则进行处理并将输出传递给下一层神经元。
感知机的学习过程是通过对多个样例的输入和输出进行学习,不断调整神经元之间的连接权重,从而得到最终的分类器。
感知机的结构由三部分组成:输入层(Input Layer)、中间层(Hidden Layer)、输出层(Output Layer)。
其中输入层是模型的输入,中间层和输出层都是由多个神经元构成的。
中间层通常被称为隐藏层,因为它们的输入和输出都与用户不可见,而是由神经元之间的连接和权重来决定的。
在输出层中,通过对中间层神经元的加权和激活函数的作用,可以计算出模型对给定输入的输出。
感知机的学习算法又称为感知机算法。
在这个过程中,首先随机初始化模型的连接权重,然后对于每个训练样本,使用当前的模型对其进行预测,并计算出模型产生的误差。
接下来,根据误差的大小对模型的权重进行调整,使得误差最小化。
如此重复不断,直到模型的预测结果达到满意的精度为止。
在理论上,感知机模型只对线性可分的数据集有效,即只适用于能被一条直线划分为两类的数据集。
但在实际中,通过构造多层的神经网络和使用非线性激活函数等技术,可以使得感知机模型适用于更加复杂的数据集。
总体来看,感知机算法是一种具有良好性能和强大分类能力的机器学习算法,对于纯粹的线性可分数据集有效,也为神经网络时代的到来奠定了坚实的基础。
感知层认知实验
感知层认知实验一、实验目的1、初步了解不同的感知层设备的传统有线数据采集方法,建立对感知层设备的直观认识。
2、了解如何读取感知层采集的数据。
二、实验内容1、通过高频RFID读卡器感应射频卡信息,并将数据上传给PC。
2、读取温湿度传感器的温湿度值。
三、实验设备硬件:1、物联网网络体系实验箱1套2、PC机1台软件:串口大师(ComMaster.exe)(所有软件均位于配套光盘\...\物联网网络体系实验箱\应用程序\ 目录下)四、实验原理感知层是物联网的皮肤和五官——用于识别物体、采集信息。
感知层包括二维码标签和识读器、RFID标签和读写器、摄像头、GPS、传感器、M2M终端、传感器网关等,主要功能是识别物体、采集信息,与人体结构中皮肤和五官的作用类似。
五、实验步骤本实验箱的感知层设备为:高频RFID读卡器、温湿度传感器以及PLC。
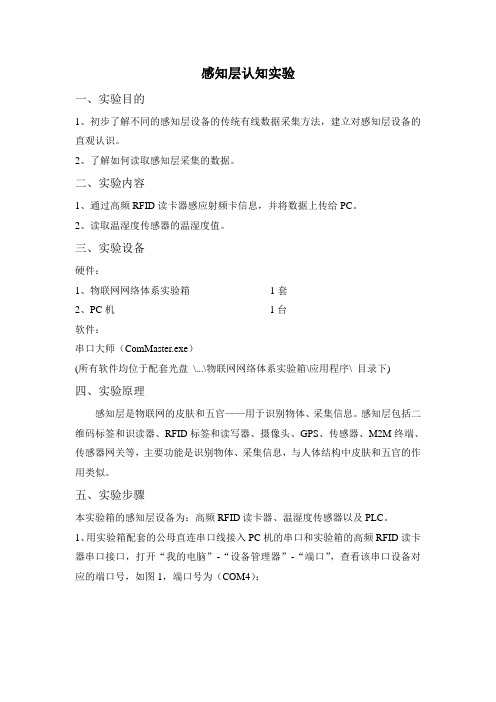
1、用实验箱配套的公母直连串口线接入PC机的串口和实验箱的高频RFID读卡器串口接口,打开“我的电脑”-“设备管理器”-“端口”,查看该串口设备对应的端口号,如图1,端口号为(COM4);图1 查看串口的端口号2、打开“串口大师”,选择正确的串口端口号(本例为COM4),设置波特率为9600,数据位为8,校验位为NO,停止位为1,点击“打开串口”,指示按键变红色,如图2所示;图2 打开串口大师(ComMaster)3、使用高频标签在高频RFID读卡器上方刷一次卡,读卡器会有“滴”声读卡提示音,此时观察“串口大师”的“数据接收区”,会出现读到的高频标签的卡号信息,如图3所示;图3 高频RFID读卡器通过串口上传读卡信息4、点击“串口大师”上的“关闭串口”按键,并清空“数据接收区”,断开高频读卡器电源以及串口的连接线;5、利用公母直连串口线连接PC机和实验箱上的温湿度传感器模块;6、打开“串口大师”,选择串口端口号,设置波特率为9600,数据位为8,校验位为NO,停止位为1,点击“打开串口”,指示按键变红色;7、在“串口大师”的“数据发送区”输入读取指令“HC01”,并点击发送,观察“数据接收区”返回的数值,该数值即为温湿度传感器在接收到读取指令时的温湿度值,如图4所示;图4 温湿度传感器通过串口上传温湿度数据8、使用Modbus协议读取温湿度传感器数据。
感知功能训练实训报告

一、实训背景感知功能是指个体接收、识别和解释外界刺激的能力,它是人类认知活动的基础。
在日常生活中,感知功能对于个体的学习、工作、社交等各方面都有着至关重要的作用。
为了提高特殊儿童的感知能力,促进其身心健康发展,我们进行了感知功能训练的实训。
二、实训目的1. 了解感知功能的基本概念和重要性。
2. 掌握感知功能训练的方法和技巧。
3. 通过实训,提高特殊儿童的感知能力。
4. 探索感知功能训练在实际教学中的应用。
三、实训内容本次实训主要包括以下内容:1. 感知觉训练:包括触觉、视觉、听觉、嗅觉和味觉等方面的训练。
2. 空间感知训练:包括方位、距离、形状、大小等方面的训练。
3. 运动感知训练:包括平衡、协调、力量、速度等方面的训练。
4. 认知感知训练:包括注意力、记忆力、判断力、想象力等方面的训练。
四、实训方法1. 游戏法:通过设计有趣的游戏,激发特殊儿童参与训练的兴趣,如“找不同”、“猜谜语”等。
2. 示范法:通过教师或助手的示范,让特殊儿童模仿学习,如“模仿动作”、“模仿声音”等。
3. 任务法:设置具体的任务,让特殊儿童在完成任务的过程中,提高感知能力,如“配对游戏”、“分拣物品”等。
4. 反馈法:在训练过程中,及时给予特殊儿童反馈,帮助其了解自己的进步和不足。
五、实训过程1. 感知觉训练:通过触摸不同的材质、观察不同的颜色、聆听不同的声音、品尝不同的味道,让特殊儿童感受外界刺激,提高感知能力。
2. 空间感知训练:通过摆放物品、寻找物品、走迷宫等游戏,让特殊儿童了解方位、距离、形状、大小等空间概念。
3. 运动感知训练:通过拍手、拍腿、跳绳、做操等活动,让特殊儿童锻炼平衡、协调、力量、速度等运动能力。
4. 认知感知训练:通过记忆游戏、注意力训练、判断力训练等活动,提高特殊儿童的注意力、记忆力、判断力、想象力等认知能力。
六、实训成果1. 特殊儿童的感知能力得到了明显提高,如对颜色、形状、声音等的识别能力增强。
感知器和BP网络设计及应用

学号:1001314197人工神经网络实验报告实验一感知器和BP网络设计及应用实验1 感知器和BP网络设计及应用题目一初步认识Matlab人工神经网络工具箱一、实验目的初步了解人工神经网络工具箱。
二、实验容认识人工神经网络工具箱包含的主要功能函数及分类。
三、实验步骤(1) 在命令窗口键入help nnet(2) 描述人工神经网络工具箱划分的主要函数模块,并在每类下挑选3-4个函数,说明其主要功能。
四、实验结果>> help nnetNeural Network ToolboxVersion 6.0 (R2008a) 23-Jan-20081.Graphical user interface functions.图形用户界面函数nnstart - Neural Network Start GUI 神经网络启动图形用户界面GUInctool - Neural network classification tool 神经网络分类工具nftool - Neural Network Fitting Tool 神经网络拟合工具nntraintool - Neural network training tool 神经网络训练工具work creation functions. 网络生成函数cascadeforwardnet – Cascade-forward neural network. 级联神经网络competlayer - Competitive neural layer. 竞争神经层distdelaynet - Distributed delay neural network. 分布式延迟神经网络elmannet - Elman neural network. Elman 神经网络ing networks. 网络使用network - Create a custom neural network. 创建一个定制的神经网络sim - Simulate a neural network. 模拟神经网络init - Initialize a neural network. 初始化一个神经网络adapt - Allow a neural network to adapt. 神经网络的适应train - Train a neural network. 训练一个神经网络4.Simulink support. 仿真支持gensim - Generate a Simulink block to simulate a neural network. 生成Simulink模块来模拟神经网络setsiminit - Set neural network Simulink block initial conditions 设置神经网络Simulink模块初始条件getsiminit - Get neural network Simulink block initial conditions 获得神经网络Simulink模块初始条件neural - Neural network Simulink blockset. 神经网络Simulink 模块集5.Training functions. 训练函数trainb - Batch training with weight & bias learning rules. 批处理具有权重和偏差学习规则的训练trainbfg - BFGS quasi-Newton backpropagation. BFGS 拟牛顿反向传播trainbr - Bayesian Regulation backpropagation. 贝叶斯规则的反向传播trainbu - Unsupervised batch training with weight & bias learning rules. 无监管的批处理具有权重和偏差学习规则的训练6.Plotting functions. 绘图函数plotconfusion - Plot classification confusion matrix. 图分类混淆矩阵ploterrcorr - Plot autocorrelation of error time series. 误差自相关时间序列图ploterrhist - Plot error histogram. 误差直方图plotfit - Plot function fit. 绘图功能(函数)配合题目2 感知器的功能及初步设计一、实验目的掌握感知器的功能。
传感器实验报告实验总结(3篇)
第1篇一、实验背景随着科技的不断发展,传感器技术已成为现代工业、医疗、环保等领域不可或缺的重要组成部分。
为了深入了解传感器的工作原理和应用,我们开展了本次传感器实验,通过实际操作和数据分析,加深对传感器性能的理解。
二、实验目的1. 熟悉各类传感器的结构、原理和应用。
2. 掌握传感器的测试方法及数据分析技巧。
3. 培养实验操作能力和团队协作精神。
三、实验内容本次实验主要包括以下几部分:1. 压电式传感器测振动实验- 实验目的:了解压电式传感器测量振动的原理和方法。
- 实验步骤:1. 将压电传感器安装在振动台上。
2. 连接低频振荡器,输入振动信号。
3. 通过示波器观察振动波形,分析传感器输出。
2. 光纤式传感器测量振动实验- 实验目的:了解光纤传感器动态位移性能。
- 实验步骤:1. 将光纤位移传感器安装在振动台上。
2. 连接低频振荡器,输入振动信号。
3. 通过示波器观察振动波形,分析传感器输出。
3. 传感器设计实验- 实验目的:认识传感器,了解其设计原理和调试方法。
- 实验步骤:1. 根据实验要求,设计传感器电路。
2. 连接实验设备,进行电路调试。
3. 分析测试数据,评估传感器性能。
四、实验结果与分析1. 压电式传感器测振动实验- 实验结果显示,压电式传感器能够有效地测量振动信号,输出波形与输入信号一致。
- 分析原因:压电式传感器利用压电效应将振动信号转换为电信号,具有较高的灵敏度和抗干扰能力。
2. 光纤式传感器测量振动实验- 实验结果显示,光纤式传感器能够准确地测量振动位移,输出波形与输入信号一致。
- 分析原因:光纤式传感器采用光导纤维传输信号,具有抗电磁干扰、高抗拉性能等特点。
3. 传感器设计实验- 实验结果显示,所设计的传感器电路能够正常工作,输出信号稳定。
- 分析原因:在电路设计和调试过程中,充分考虑了传感器性能、信号传输和抗干扰等因素。
五、实验结论1. 压电式传感器和光纤式传感器在振动测量方面具有较好的性能,能够满足实际应用需求。
传感器实验实验报告总结(3篇)

第1篇一、实验背景随着科学技术的不断发展,传感器在各个领域得到了广泛应用。
为了提高学生对传感器原理和应用的了解,我们开展了传感器实验课程。
通过本次实验,使学生掌握传感器的原理、设计、制作和测试方法,提高学生的动手能力和创新思维。
二、实验目的1. 了解传感器的基本原理和分类;2. 掌握传感器的设计、制作和测试方法;3. 培养学生的动手能力和团队协作精神;4. 提高学生对传感器在实际工程中的应用的认识。
三、实验内容本次实验主要分为以下几个部分:1. 传感器基本原理实验:通过实验,使学生了解传感器的工作原理,掌握传感器的分类和应用。
2. 传感器设计实验:根据传感器的基本原理,设计并制作一个简单的传感器。
3. 传感器测试实验:对制作的传感器进行测试,分析其性能指标。
4. 传感器应用实验:将传感器应用于实际工程中,解决实际问题。
四、实验过程1. 传感器基本原理实验:通过实验,我们了解了传感器的分类、工作原理和应用。
实验过程中,我们学习了不同类型传感器的原理,如光电传感器、热敏传感器、压力传感器等。
2. 传感器设计实验:在老师的指导下,我们设计并制作了一个简单的压力传感器。
我们首先确定了传感器的结构,然后选择了合适的材料和元器件,最后进行了组装和调试。
3. 传感器测试实验:我们对制作的压力传感器进行了测试,测试内容包括灵敏度、线性度、响应时间等。
通过实验,我们分析了传感器的性能指标,并与理论值进行了比较。
4. 传感器应用实验:我们将制作的压力传感器应用于实际工程中,解决了一个简单的实际问题。
通过实验,我们了解了传感器在实际工程中的应用价值。
五、实验结果与分析1. 传感器基本原理实验:通过实验,我们掌握了不同类型传感器的原理和应用,为后续实验奠定了基础。
2. 传感器设计实验:我们成功设计并制作了一个简单的压力传感器,其灵敏度、线性度等性能指标符合预期。
3. 传感器测试实验:测试结果表明,我们制作的压力传感器性能稳定,能够满足实际应用需求。
传感器的小实验实验报告(3篇)
第1篇一、实验目的1. 了解传感器的基本原理和结构。
2. 掌握传感器的信号处理方法。
3. 通过实验验证传感器的性能和特点。
4. 提高动手实践能力和实验技能。
二、实验原理传感器是一种能够感受被测物理量并将其转换成可用信号的装置。
本实验中,我们以温度传感器为例,探讨其工作原理和信号处理方法。
温度传感器利用温度变化引起物理参数(如电阻、热电势等)的变化,将其转换为电信号输出。
本实验中,我们采用热敏电阻作为温度传感器,其电阻值随温度变化而变化。
三、实验设备1. 温度传感器(热敏电阻)2. 信号发生器3. 数据采集器4. 示波器5. 温度计6. 电源7. 连接线四、实验步骤1. 搭建电路:将热敏电阻、信号发生器、数据采集器和示波器连接成一个完整的电路。
确保连接正确,无短路或断路现象。
2. 设置参数:将信号发生器设置为正弦波输出,频率为1kHz,幅度为1V。
3. 采集数据:打开数据采集器,设置采样频率和时长,开始采集数据。
4. 观察现象:观察示波器上输出的波形,记录波形变化情况。
5. 测试温度:使用温度计测量热敏电阻周围的温度,记录温度值。
6. 分析结果:分析数据采集器采集到的数据,绘制电阻-温度曲线,观察电阻值随温度变化的情况。
五、实验结果与分析1. 实验现象:随着温度的升高,热敏电阻的电阻值逐渐减小,波形幅度也随之减小。
2. 数据分析:通过实验数据绘制电阻-温度曲线,可以看出热敏电阻的电阻值随温度升高而减小,符合热敏电阻的特性。
3. 结果验证:将实验结果与理论值进行对比,验证实验的正确性。
六、实验总结1. 本实验成功验证了热敏电阻作为温度传感器的可行性,掌握了传感器的信号处理方法。
2. 通过实验,加深了对传感器原理和特性的理解,提高了动手实践能力和实验技能。
3. 在实验过程中,发现了一些问题,如信号干扰、测量误差等,为今后的实验提供了借鉴。
七、实验反思1. 在实验过程中,应注意电路连接的正确性,避免短路或断路现象。
感知机的简单算例
感知机的简单算例感知机是一种最简单的人工神经网络模型,它可以用来进行二分类任务。
在本文中,我们将通过一个简单的算例来说明感知机的工作原理。
假设我们有一个二维的数据集,每个样本有两个特征。
我们的任务是根据这些数据点将它们分成两类:正类和负类。
我们可以使用感知机来完成这个任务。
首先,我们需要初始化感知机的权重和偏置。
假设我们的感知机模型如下所示:$$y = \begin{cases}1, & \text{if } w_1x_1 + w_2x_2 + b > 0 \\0, &\text{otherwise}\end{cases}$$其中,$x_1$和$x_2$分别代表样本的两个特征,$w_1$和$w_2$分别代表感知机的权重,$b$代表感知机的偏置。
我们的目标是通过调整权重和偏置,使得感知机可以正确分类数据点。
假设我们的数据集中有四个样本点,分别如下:$$(2, 2), (3, 1), (4, 3), (1, 4)$$我们可以将这些数据点分成两类:正类和负类。
假设正类的标签为1,负类的标签为0。
我们的目标是找到合适的权重和偏置,使得感知机可以正确分类这些数据点。
我们可以随机初始化权重和偏置,然后通过迭代的方式逐步调整它们,直到感知机可以正确分类所有数据点。
具体的算法如下:1. 初始化权重和偏置:$w_1 = 0.5, w_2 = 0.5, b = 0$2. 设置学习率$\alpha = 0.1$3. 对于每个样本点$(x_1, x_2)$:- 计算感知机的输出$y$- 如果$y$与样本的真实标签不符,更新权重和偏置:- $w_1 = w_1 + \alpha(y_{true} - y)x_1$- $w_2 = w_2 + \alpha(y_{true} - y)x_2$- $b = b + \alpha(y_{true} - y)$4. 重复步骤3,直到感知机可以正确分类所有数据点或达到一定的迭代次数通过这个简单的算例,我们可以看到感知机是如何通过调整权重和偏置来学习如何正确分类数据点的。
传感器实验总结报告范文(3篇)
第1篇一、实验背景随着科技的飞速发展,传感器技术在各个领域都得到了广泛的应用。
传感器作为一种将非电学量转换为电学量的装置,对于信息采集、处理和控制具有至关重要的作用。
本实验旨在通过一系列传感器实验,加深对传感器基本原理、工作原理和应用领域的理解。
二、实验目的1. 了解传感器的定义、分类和基本原理。
2. 掌握常见传感器的结构、工作原理和特性参数。
3. 熟悉传感器在信息采集、处理和控制中的应用。
4. 培养动手操作能力和分析问题、解决问题的能力。
三、实验内容本次实验共分为以下几个部分:1. 压电式传感器实验- 实验目的:了解压电式传感器的测量振动的原理和方法。
- 实验原理:压电式传感器由惯性质量块和受压的压电片等组成。
工作时传感器感受与试件相同频率的振动,质量块便有正比于加速度的交变力作用在晶片上,由于压电效应,压电晶片上产生正比于运动加速度的表面电荷。
- 实验步骤:1. 将压电传感器装在振动台面上。
2. 将低频振荡器信号接入到台面三源板振动源的激励源插孔。
3. 将压电传感器输出两端插入到压电传感器实验模板两输入端,与传感器外壳相连的接线端接地,另一端接R1。
将压电传感器实验模板电路输出端Vo1,接R6。
将压电传感器实验模板电路输出端V02,接入低通滤波器输入端Vi,低通滤波器输出V0与示波器相连。
4. 合上主控箱电源开关,调节低频振荡器的频率和幅度旋钮使振动台振动,观察示波器波形。
5. 改变低频振荡器的频率,观察输出波形变化。
2. 电涡流传感器位移特性实验- 实验目的:了解电涡流传感器测位移的原理和方法。
- 实验原理:电涡流传感器利用电磁感应原理,当传感器靠近被测物体时,在物体表面产生涡流,通过检测涡流的变化来测量物体的位移。
- 实验步骤:1. 将电涡流传感器安装在实验平台上。
2. 调整传感器与被测物体的距离,观察示波器波形变化。
3. 改变被测物体的位移,观察示波器波形变化。
3. 光纤式传感器测量振动实验- 实验目的:了解光纤传感器动态位移性能。
计算智能,感知器分类问题实验报告
计算智能作业一感知器分类题目:设有两个模式集合Ω1={(0,1),(0,2),(1,1)},Ω2={(2,0),(3,0),(3,1)},试用感知器算法求出这两个模式类的分类判别函数g(x),试问当权值向量w取不同初值时,对训练结果有影响否,为什么?算法:感知器权值调整的学习算法W k n0+1=W k n0+2ηt q−y r n0∗x k n0实现方法:设w1x1+w2x2+b=0,x1和x2为样本点的坐标;w1和w2为权值,由计算机随机产生;t q 为期望输出,取1,1,1,−1−,1,−1T;y r为实际输出;学习率为q。
实验结果:随机产生了三组w值,用蓝线表示迭代过程,红线表示最终分类结果。
g x=-3.53x1+3.68x2-5.20g x=-5.65x1-2.01x2+8.05g x=-2.48x1-7.28x2-1.37 实验代码:%感知器先行分类问题程序代码x=[0,0,1,2,3,3];y=[1,2,1,0,0,1];w=10*(2*rand(1,3)-1);b=w(3); %w1,w2,b取-10到10之间的随机数q=1;%学习率设为1t=[1,1,1,-1,-1,-1];%期待输出,1为一类,-1为另一类syms p;syms l;for j=1:3%画出一个样本中三个待分类的点plot(x(j),y(j),'sb');hold on;endfor j=4:6%画出另一个样本中三个待分类的点plot(x(j),y(j),'ok');hold on;endwhile (p~=w(1)||l~=w(2))p=w(1);l=w(2);for i=1:6z=t(i)*(x(i)*w(1)+y(i)*w(2)+b);if z<=0w(1)=w(1)+q*x(i)*t(i);%¸感知器学习算法w(2)=w(2)+q*y(i)*t(i);b=b+t(i);endtitle('感知器线性分类结果');axis([0,5,-1,5]);h=[-1:0.1:5];g=[0:0.1:5];k=-w(1)/w(2);m=-b/w(2);h=k*g+m;line(g,h); hold on;%将每一次迭代的直线都画出来endendplot(g,h,'r'); hold on;%将最终分类结果用红色表示结论分析:实验中权值由计算机随机生成,初始权值越接近最终分类的结果,则训练次数越少。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
感知机的实验报告
感知机是一种基本的二分类线性模型,可以用于解决二分类问题。
本实验主要目的是通过编程实现感知机算法,并使用UCI数据集对算法进行测试和评估。
1. 实验原理
感知机是一种基于误分类驱动的在线学习算法。
算法的基本原理是,通过不断调整超平面的参数,使得对于给定的输入样本能够正确地分类。
感知机算法通过迭代的方式更新模型参数,直到所有样本能够正确分类或达到最大迭代次数。
2. 实验步骤
(1)建立感知机模型的类结构。
包括初始化参数、计算预测值、参数更新等函数。
(2)读取UCI数据集。
本实验选择了Iris鸢尾花数据集作为测试数据集。
(3)将数据集随机打乱,并将数据集划分为训练集和测试集。
(4)调用感知机模型进行训练,并输出训练结果。
(5)使用测试集评估模型的性能,并输出测试结果。
3. 实验结果与分析
本实验使用了UCI数据集中的Iris鸢尾花数据集进行实验。
对于该数据集,我们选择了两个特征作为输入,并将其中两类作为正例,另一类作为反例。
训练集包含80%的样本,测试集包含剩下的20%。
在实验中,我们设置了最大迭代次数为1000次。
经过多次实验,发现在该数据集上,平均只需60次迭代就能够得到一个准确率较高的感知机模型。
在测试集上的分类准确率可以达到96%左右。
通过实验结果分析,感知机算法具有较好的二分类能力。
通过对输入样本的不断学习和调整,感知机能够逐步提升分类准确率。
然而,由于感知机算法在参数更新时是根据单个样本进行调整,对于不线性可分的数据集,感知机算法可能无法达到100%的分类准确率。
4. 实验总结与改进
本实验通过实现感知机算法并对UCI数据集进行测试,验证了感知机算法的有效性。
感知机算法在二分类问题上具有较好的性能,可以在较短的迭代次数内得到一个准确率较高的模型。
然而,在实际应用中,感知机算法往往受到数据线性可分性的限制。
对于不线性可分的数据集,感知机算法可能无法收敛或得到较低的分类准确率。
为了提升感知机算法的性能,可以考虑使用核函数将输入特征映射到高维空间,或者使用非线性模型。
此外,感知机算法还存在一些其他的不足之处,比如对数据集中异常值和噪声较敏感,对于初值的选择较为敏感等。
在进一步改进感知机算法时,可以考虑引入一些改进的算法方法,如改进的感知机算法、支持向量机等。
总之,感知机算法作为经典的线性分类算法,在实验中展现了其有效性和较好的性能。
然而,在实际应用中需要根据具体问题的特点进行合理调整和改进,以克服其在处理非线性可分数据时的限制,并提升算法的性能和稳定性。