PWM变频调速电动机端子上电压特性的研究
变频变压调速
第六章 交流异步电动机变压变频调速系统本章主要问题:1. 在变频调速中变频时为什么要保持压频比恒定?2. 交-直-交电压源型变频器调压、调频的有哪几种电路结构,并说明各种电压结构的优缺点。
3. SPWM 控制的思想是什么?4. 什么是1800导通型变频器?什么是1200导通型变频器? 5. 电压、频率协调控制有几种控制方式,各有哪些特点?6. 在转速开环恒压频比控制系统中,绝对值单元GAB 的作用?函数发生器GFC 的作用?如何控制转速正反转。
7. 总结恒11U 、恒1ωg E 、恒1ωr E 三种控制方式的特点。
————————————————————————————————————————§6-1 交流调速的基本类型要求:掌握交流调速哪几种基本类型有以及各种调速方法的特点。
目的:能根据不同应用场合选择出相应的调速方式。
重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(交流调速的基本类型、变频调速的基本要求)思考: 1. 交流异步电动机调速的方式有哪几种?并写出各方式的优缺点?2. 在变频调速中变频时为什么要保持压频比恒定?教学设计:交流调速的基本类型采用多媒体课件讲授,用大量的实例,说明几种类型的应用场合。
复习感应电动机转速表达式:)1(60)1(10s n f s n n p-=-=异步电动机调速方法:⎪⎪⎪⎩⎪⎪⎪⎨⎧⎪⎪⎩⎪⎪⎨⎧型变频调速:绕线式、笼:绕线式串级调速(转差电压)电磁转差离合器调转子电阻:绕线式、调压(定子电压)变转差率调速变极调速:笼型异步机异步电动机§6-2 变频调速的构成及基本要求目的、教学要求:掌握变频调速时基频以下和基频以上调速的特点 重点、难点:变频调速时基频以下和基频以上调速的特点 主要内容(变频调速的基本要求)思考:在变频调速中变频时为什么要保持压频比恒定?教学设计:教师从交流异步电动机的结构、工作原理出发,利用多媒体课件讲解。
采用SPWM的开环VVVF调速系统实验
实验三 采用SPWM 的开环VVVF 调速系统实验一、实验目的(1)加深对SPWM 生成机理和过程的理解 (2)熟悉SPWM 变频调速系统中直流回路、逆变桥器件和微机控制电路之间的连接 (3) 了解SPWM 变频器运行参数和特性二、实验内容一、在不同调制方式下,观测不同调制方式与相关参数变化对系统性能的影响,并作比较研究:1.同步调制方式时,在不同的速度下,观测载波比变化对定子磁通轨迹的影响;2.异步调制方式时,在不同的速度下,观测载波比变化对定子磁通轨迹的影响;3.分段同步调制时,在不同的速度下,观测载波比变化对定子磁通轨迹的影响;二、观测并记录启动时电机定子电流和电机速度波形)(t f i v =与)(t f n =;三、观测并记录突加与突减负载时的电机定子电流和电机速度波形)(t f i v =与)(t f n =;四、观测低频补偿程度改变对系统性能的影响五、测取系统稳态机械特性)(M f n =;三、实验原理1、异步电动机恒压频比控制基本原理由异步电动机的工作原理可知,电机转速n 满足:)1(60s pf n -= 错误!未找到引用源。
其中f 为定子电源频率,p 为电机定子极对数,s 为电机转差率。
从上式中可以得到,通过改变定子绕组交流供电电源频率,即可实现异步电机速度的改变。
但是,在对异步电机调速时,通常需要保持电机中每极磁通保持恒定,因为如果磁通太弱,铁心的利用率不充分,在同样的转子电流下,电磁转矩小,电动机的带负载能力下降;如果磁通过大,可能造成电动机的磁路过饱和,从而导致励磁电流过大,电动机的功率因数降低,铁心损耗剧增,严重时会因发热时间过长而损坏电机。
如果忽略电机定子绕组压降的影响,三相异步电动机定子绕组产生的感应电动势有效值E 与电源电压U 可认为近似相等,为:m N 44.4ΦfNk E U =≈其中E 为气隙磁通在定子每相绕组中感应电动势的有效值,错误!未找到引用源。
f 为定子电压频率,N 为定子每相绕组匝数,错误!未找到引用源。
实验二 正弦脉宽调制(SPWM)变频调速实验
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
4、实验内容
* 运行频率f1=5Hz,比较研究 ① 载波频率f0=500Hz、1000Hz、2000Hz下,电机低 速运行的噪声、振动、转速平稳程度, ② 描述不同V/f曲线下的起动能力 ③ 记录f0=2000Hz时线电压/线电流波形
SPWM变频调速实验
5、实验注意
(1)操作注意 * 观测电机电压、电流时注意探头公共地线接法 以U相为例
探头1
U V W
示波器探头地线
M
探头2
采样电阻
* 波形采集 使用示波器采集,自带拍照工具。
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
5、实验注意
(1)实验报告注意 * 对实验波形,对照PWM调制理论进行分析,特别 是记录的波形 * 对观察、描述的实验内容作详尽的描述、分析, 得出和符理论的结论,特别报告: ① 不同调制比对运行性能的影响 ② 低速运行平稳性与调制比关系
(2)驱动电路 脉冲变换→光电隔离→施加在MOSFET栅极
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
SPWM变频调速实验
(3)过流保护 Idc
——主电路4-5间接采样电阻,检测其上电压 ——过流后发出“OC”信号 ● 封锁驱动电路脉冲 ● MP保护电路工作,显示“OC”,并停机 解除停机,按复位键。
1. 加深理解自然采样法形成双极性SPWM的机理; 2. 熟悉SPWM变频器功率主电路、控制电路的结构和连接 关系; 3. 了解SPWM调制三种控制方式、控制参数及输出波形。
机电运动控制系统 机电运动控制系统 直流电动机的控制 SPWM变频调速
变频调速及其控制技术的现状与发展趋势

变频调速及其控制技术的现状与发展趋势摘要:变频调速技术以其卓越的调速性能、显著的节电效果在各个领域得到广泛的应用,为节能降耗、改善控制性能、提高产品的产量和质量提供了重要手段。
本文首先回顾了变频调速技术的发展历史和现状,然后总结了变频调速中的关键控制技术,并介绍了智能控制理论在变频调速系统中的应用情况,最后指出了变频调速技术的发展趋势。
关键字:变频调速技术矢量控制异步电动机PWM技术智能控制1变频调速技术的发展历史及现状变频调速技术涉及到电力、电子、电工、信息与控制等多个学科领域。
随着电力电子技术、计算机技术和自动控制技术的发展,以变频调速为代表的近代交流调速技术有了飞速的发展。
交流变频调速传动克服了直流电机的缺点,发挥了交流电机本身固有的优点(结构简单、坚固耐用、经济可靠、动态响应好等),并且很好地解决了交流电机调速性能先天不足的问题。
交流变频调速技术以其卓越的调速性能、显著的节电效果以及在*****领域的广泛适用性,而被公认为是一种最有前途的交流调速方式,代表了电气传动发展的主流方向。
交流调速技术为节能降耗、改善控制性能、提高产品的产量和质量提供了至关重要的手段。
变频调速理论已形成较为完整的科学体系,成为一门相对独立的学科。
变频装置有交-直-交系统和交-交系统两大类。
交-直-交系统又分为电压型和电流型,其中,电压型变频器在工业中应用最为广泛。
本文所涉及的就是此类变频调速理论和技术。
20世纪是电力电子变频技术由诞生到发展的一个全盛时代。
最初的交流变频调速理论诞生于20世纪20年代,直到60年代,由于电力电子器件的发展,才促进了变频调速技术向实用方向发展。
70年代席卷工业发达国家的石油危机,促使他们投入大量的人力、物力、财力、去研究高效率的变频器,使变频调速技术有了很大的发展并得到推广应用。
80年代,变频调速已产品化,性能也不断提高,发挥了交流调速的优越性,广泛地应用于工业各部门,并且部分取代了直流调速。
PWM型变频器的基本控制方式
PWM型变频器的基本控制方式通用的PWM型变频器是一种交—直—交变频,通过整流器将工频交流电整流成直流电,经过中间环节再由逆变器将直流电逆变成频率可调的交流电,供给交流负载。
异步电动机调速时,供电电源不但频率可变,而且电压大小也必须能随频率变化,即保持压频比基本恒定。
PWM型变频器一般采用电压型逆变器。
根据供给逆变器的直流电压是可变的还是恒定的,变频器可分成两种基本控制方式。
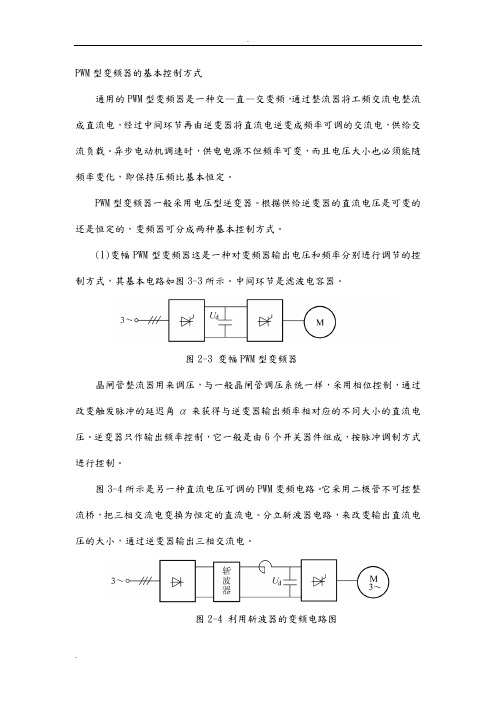
(1)变幅PWM型变频器这是一种对变频器输出电压和频率分别进行调节的控制方式,其基本电路如图3-3所示。
中间环节是滤波电容器。
图2-3 变幅PWM型变频器晶闸管整流器用来调压,与一般晶闸管调压系统一样,采用相位控制,通过改变触发脉冲的延迟角α来获得与逆变器输出频率相对应的不同大小的直流电压。
逆变器只作输出频率控制,它一般是由6个开关器件组成,按脉冲调制方式进行控制。
图3-4所示是另一种直流电压可调的PWM变频电路。
它采用二极管不可控整流桥,把三相交流电变换为恒定的直流电。
分立斩波器电路,来改变输出直流电压的大小,通过逆变器输出三相交流电。
图2-4 利用斩波器的变频电路图以上两种调压式变频电路,都需要两极可控功率级,相比较,采用晶闸管整流桥可以获得更大功率的直流电,由于可控整流桥采用相位控制,输入功率因数将随输出直流电压的减小而降低;而斩波式调压,输入功率变流级采用的是二级管整流桥,所以输入端有很高的功率因数,代价是多了一个斩波器。
另外,就动态响应的快速性来说后者比前者好。
(2)恒幅PWM型变频器恒幅脉宽调制PWM式变频电路如图3.3所示,它由二极管整流桥,滤波电容和逆变器组成。
逆变器的输入为恒定不变的直流电压,通过调节逆变器的脉冲宽度和输出交流电压的频率,既实现调压又实现调频,变频变压都是由逆变器承担。
此系统是目前使用较普遍的一种变频系统,其主电路简单,只要配上简单的控制电路即可。
它具有下列主要优点:1)简化了主电路和控制电路的结构。
基于pwm技术的无刷直流电机的调速系统设计大学论文
基于PWM技术的无刷直流电机的调速系统设计Brushless DC Motor Speed Control System Based On PWM摘要无刷直流电机(BLDCM)具有调速性能优异、运行性能可靠和维护方便等优点,相较于有刷直流电机,其采用电子换向取代机械换向,有效地提高了电动机的运行效率,也使得其成品体积更加的轻巧。
但是无刷直流电机也存在转矩脉动、控制器复杂、成本较高等缺陷,这些缺陷的存在也一定程度上影响了无刷直流电机作为高效、先进电机在应用上的普及,因此研究如何改善以及解决无刷直流电机存在的问题便具有更加明显的现实意义。
MATLAB是一款用于数据分析与计算、算法开发以及动态系统建立与仿真的数学软件。
最初是由美国MathWorks公司出品的商用数学软件,其由Matlab和Simulink 两个重要组成部分构成,现在更是应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
本文通过对无刷直流电机结构以及工作原理的研究与分析,找出导致其具有较大转矩脉动的原因,并先从理论上得到如何抑制转矩脉动的方法,再通过Matlab 建立起无刷直流电机的仿真模型,对其仿真结果进行分析与改善,从而有效地抑制无刷直流电机的转矩脉动。
关键词:无刷直流电机,转矩脉动,仿真模型AbstractBrushless DC motor (BLDCM) has excellent speed performance, reliable performance and easy maintenance, etc., compared to a brush DC motor, which uses electronically commutated replace mechanical commutation, effectively improve the operating efficiency of the motor, but also so that the volume of the finished product more compact. But there brushless DC motor torque ripple controller complexity, high cost and other defects, the presence of these defects also affected to some extent, a brushless DC motor as efficient and advanced motor universal in application, how to improve and therefore research solve the problems of the brushless DC motor will have more obvious practical significance.MATLAB is a tool for data analysis and computation, algorithm development, and simulation of dynamic systems to establish and mathematical software. MathWorks was originally developed by the US company produced commercial mathematical software, which consists of Matlab and Simulink are two important parts, and now it is used in engineering calculations, control design, signal processing and communications, image processing, signal detection, financial modeling design and analysis and other fields.Based on the brushless DC motor structure and working principle of research and analysis to identify the cause of which has a large torque ripple, and theoretically first get how to suppress torque ripples, established through Matlab brushless Simulation Model DC motor, its simulation results are analyzed and improved in order to effectively suppress the torque ripple of the brushless DC motorKeywords:Brushless DC motor; The torque pulsation; The simulation model目录第一章绪论 (6)1.1 研究背景及研究意义 (6)1.2 无刷直流电机调速系统的国内外研究现状 (7)1.3 本文的主要研究内容及章节安排 (8)第二章无刷直流电机的基本原理 (9)2.1 无刷直流电机的基本结构 (9)2.1.1 电机本体 (9)1.电动机定子 (9)2. 电动机转子 (10)2.1.2 位置传感器 (10)2.2 无刷直流电机的工作原理及换相过程 (12)2.2.1 无刷直流电机的工作原理 (13)2.2.2 无刷直流电机的换相过程 (15)2.3 无刷直流电机的应用 (16)2.4 本章小结 (16)第三章基于PWM技术的无刷直流电机转矩脉动抑制 (17)3.1 PWM控制技术简介 (17)3.1.1 PWM控制技术的基本原理 (17)3.1.2 PWM控制技术的控制方法 (18)3.2 Buck变换器的原理及控制方式 (19)3.2.1 Buck变换器的原理 (19)3.2.2 Buck变换器的控制方式 (20)3.3 无刷直流电机转矩脉动的产生 (20)3.3.1传导区转矩脉动 (21)3.3.2换相区转矩脉动 (22)3.4 无刷直流电机转矩脉动的抑制 (24)3.5 本章小结 (27)第四章无刷直流电机的仿真分析 (28)4.1 MATLAB和SIMULINK的介绍 (28)4.2 无刷直流电机的数学模型 (29)4.2.1电机本体模块 (30)4.2.2转矩计算模块 (31)4.2.3速度控制模块 (32)4.2.4电流控制模块 (32)4.2.5电压逆变模块 (33)4.3无刷直流电机的仿真结果 (33)4.4本章小结 (38)结论 (39)致谢 (40)参考文献 (41)附录 (42)第一章绪论1.1 研究背景及研究意义对于工厂生产和社会发展而言,电力拖动都有着举足轻重的地位,为了满足生产工艺的需求,通过控制电机的转矩以及转速来控制电动机的转速以及位置,这样就可以形成一个自动化系统,称之为电力拖动。
单片机课程设计完整版《PWM直流电动机调速控制系统》
单片机原理及应用课程设计报告设计题目:学院:专业:班级:学号:学生姓名:指导教师:年月日目录设计题目 (3)1 设计要求及主要技术指标: (4)1.1 设计要求 (4)1.2 主要技术指标 (5)2 设计过程 (6)2.1 题目分析 (9)2.2 整体构思 (10)2.3 具体实现 (12)3 元件说明及相关计算 (14)3.1 元件说明 (14)3.2 相关计算 (15)4 调试过程 (16)4.1 调试过程 (16)4.2 遇到问题及解决措施 (20)5 心得体会 (21)参考文献 (22)附录一:电路原理图 (23)附录二:程序清单 (24)设计题目:PWM直流电机调速系统本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED液晶显示器、霍尔测速电路以及独立按键组成的电子产品。
电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。
通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。
电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。
关键词:直流电机调速;定时中断;电动机;PWM波形;LED显示器;51单片机1 设计要求及主要技术指标:基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM 调速控制装置。
1.1 设计要求(1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。
(2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。
(3)设计一个4个按键的键盘。
K1:“启动/停止”。
K2:“正转/反转”。
K3:“加速”。
K4:“减速”。
(4)手动控制。
在键盘上设置两个按键----直流电动机加速和直流电动机减速键。
在手动状态下,每按一次键,电动机的转速按照约定的速率改变。
毕设论文--异步电动机SPWM变频调速原理与仿真分析
异步电动机SPWM变频调速原理与仿真分析摘要在分析SPWM原理的基础上,利用MATLAB/SIMULINK软件构造了SPWM调速系统的仿真模型并说明了规则采样法的可行性。
该模型主要利用S-函数模拟自然采样法和规则采样法的控制规则并应用电力系统工具箱构建逆变桥和电机,能够比较好的模拟真实的系统并实现变频调速的功能。
通过对仿真结果的分析,对比自然采样法和规则采样法控制性能的差异,得出了规则采样法在工程实际中应用的可行性。
关键词:SPWM,异步电机,MATLAB,仿真,规则采样法,自然采样法The Simulation and Analysis of the Fundmental Principle of Asynchronous Motor SPWM Speed AdjustingABSTRACTBase on analizing SPWM principle, the SPWM velocity modulation system's simulation model has been constructed by using the MATLAB/SIMULINK software.After analizing the results of simulation,the feasibility of the regular sample law is given out. This model mainly uses the S- function analogue natural sampling law and the regular sampling method control rule and construct inverter and machine ,this model can simulate the real system and realize the frequency conversion velocity modulation function. The simulation results is given out in this paper, though analizing the simulation results and constrasting the difference of the control performance of natural sampling law and regular sampling,the application feasibility of the regular sampling law in the project has been obtained.KEYWORDS: SPWM ,aynchronous motor,MATLAB,simulation, regular sampling law, ntural sampling law目录摘要 (I)ABSTRACT .................................................................................................................................................... I I 1 绪论 (1)1.1交流调速系统的发展 (1)1.2交流调速系统的基本类型 (2)1.2.1 异步电动机调速系统的基本类型 (2)1.2.2 同步电动机调速的基本类型 (4)2 Siulink 仿真基础 (5)2.1 Simulink简介 (5)2.1.1 Simulink 启动 (5)2.1.2 Simulink 组成 (5)2.1.3 仿真过程 (6)2.2 Simulink 模块库简介 (6)2.3电力系统工具箱简介 (6)2.4 S-函数简介 (6)2.4.1 S-函数的基本概念 (6)2.4.2 S-函数的使用 (7)2.4.3 与S-函数相关的一些术语 (7)2.4.4 S-函数的工作原理 (8)2.4.5 编写M文件S-函数 (9)3 异步电动机变压变频调速系统 (11)3.1概述 (11)3.2变压变频调速的基本控制方式 (11)3.2.1 基频以下调速 (11)3.2.2 基频以上调速 (12)3.3异步电动机电压-频率协调控制时的机械特性 (12)4 PWM控制技术 (15)4.1 正弦脉宽调制原理及其优点 (15)4.1.1 SPWM原理 (15)4.1.2 SPWM的优点 (18)4.1.3关于SPWM的开关频率 (19)4.2 同步调制和异步调制 (19)4.2.1 异步调制 (19)4.2.2 同步调制 (19)4.2.3 分段同步调制 (20)4.3 SPWM波形的生成 (20)4.3.1 自然采样法 (20)4.3.2 规则采样法 (21)5 异步电动机SPWM变频调速仿真系统的设计 (23)5.1自然采样法系统的设计 (23)5.1.1 三角波的生成 (23)5.1.2 自然采样法SPWM 脉冲的生成 (25)5.1.3 直流电源 (25)5.1.4 逆变器的设计 (25)5.1.5 系统总框图的设计 (26)5.2 规则采样法系统的设计 (26)5.2.1 规则采样法脉冲的生成 (26)5.2.2 规则采样法系统总框图的设计 (28)5.3仿真分析 (28)5.3.1 额定转速(50HZ)的波形 (29)5.3.2 性能对比分析 (30)致谢 (36)参考文献 (37)1 绪论1.1 交流调速系统的发展[1]直流电气传动和交流电气传动在19世纪先后诞生。
基于ATmega8的PWM双闭环直流调速设计论文
本论文主要是对双闭环PWM直流调速系统的研究,实现对电动机的数字化控制。
在设计中,对PWM直流调速的原理、双闭环直流调速原理和特点进行了全面阐述。
为实现系统的微机数字化控制,采用了ATmega8作为整个控制系统的核心部分,配以显示、驱动、测量等模块,实现对电动机转速参数的显示和测量。
硬件组成包括ATmega8单片微机、电流检测模块、转速检测模块、保护模块、键盘模块、显示模块、直流电机驱动模块等组成。
在设计中,采用PWM调速方式,通过改变PWM的占空比从而改变电动机的电枢电压,为了提高控制系统的性能和可靠性,设计中,对电流环和转速环采用PID调节器。
在软件实现中,本系统采用增量式PID控制算法来改变PWM的占空比,在硬件结构上采用了集成电路模块,简化了硬件电路,提高了系统的稳定性和可靠性,使整个系统的性能得到提高。
实现了直流电动机的实时数字PWM控制,具有控制方便、组态简单和灵活性大等优点。
关键词:ATmega8单片机;直流电机;PWM调速; 双闭环; PIDThis paper is mainly to the double loop DC speed control system of study PWM, to achieve the digital control of DC motor. In the design, the principle of the PWM DC Motor Speed Control, the principle and characteristics of Double Closed Loop DC Speed Control are analyzed comprehensively expounded. For the realization of digital control computer system, using the ATmega8, as the core of the whole control system, together with the display, drive, measurement modules, to achieve the motor speed parameter display and measurement. Hardware includes the ATmega8 single chip microprocessor, the current detection module, speed detection module, protect module, keyboard module, the display module, the driver module of DC motor and other components. In the design, using PWM control mode, through changing the PWM duty cycle to change the motor armature improve the control performance and reliability of the system, the design of current loop and rotational speed, using PID regulator. In this system, the software realization of incremental PID control algorithm is adopted to realize PID parameters of the system and the software programming realize speed current digital PID adjuster operations and generate digital PWM waves.In the software implementation, the system uses the incremental PID control algorithm to change the PWM duty cycle. In the hardwarestructure of integrated circuits using modules, greatly simplified the hardware circuit, improve the stability and reliability of the system, the system's performance improved. It realizes the real-time digital PWM motor control, with convenient control, simple and flexible configuration advantages.Key words: ATmega8 microcontroller; DC motor: PWM Speed Regulator; Double closed loop; PID目录1 绪论 (6)1.1 课题的背景和意义 (6)1.2 课题研究的主要内容 (7)2 直流电机PWM调速原理和总体方案确定 (7)2.1直流电机PWM调速原理 (7)2.2 PWM脉冲产生方式 (9)2.3 双闭环直流调速系统的介绍 (10)2.3.1 双闭环直流调速系统的工作原理 (10)2.3.2 双闭环调速系统的作用 (12)2.3.3 数字双闭环直流调速系统 (12)3 系统总体方案分析与设计 (13)3.1系统总体方案的分析 (13)3.2 系统总体方案的设计 (13)4 系统硬件电路设计 (14)4.1 ATmega8单片机最小系统 (14)4.1.1 ATmega8的简介及特点 (14)4.1.2 ATmega8单片机的最小系统的其他电路设计 (16)4.2 电源模块电路设计 (17)4.3 直流电机驱动模块设计 (18)4.3.1 H桥驱动电路原理 (18)4.3.2 直流电机驱动电路设计 (18)4.4 隔离模块电路设计 (21)4.5 键盘电路设计 (22)4.6 速度和电流检测模块电路设计 (24)4.6.1 速度检测电路设计 (24)4.6.2 电流检测电路设计 (26)4.7 转速显示电路模块设计 (26)4.8 串行通信模块电路设计 (27)5电机控制策略的研究 (28)5.1 PID算法 (28)5.2 数字滤波算法 (32)6 系统软件设计 (33)6.1 主程序设计 (33)6.2 初始化程序设计 (34)6.3 中断服务子程序设计 (34)7 总结与展望 (38)参考文献 (39)附录..................................................... 错误!未定义书签。
基于PWM控制直流电机自动调速系统设计
1 绪论1.1 课题的研究背景和意义直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性;尽管近年来不断受到其他电动机(如交流变频电机、步进电机等)的挑战,但到目前为止,它仍然是大多数调速控制电动机的优先选择。
近年来,直流电动机的结构和控制方式都发生了很大变化。
随着计算机进入控制领域以及新型的电力电子功率元件的不断出现,使采用全控型的开关功率元件进行脉宽调制 (PulseWidthModulation,简称PWM)控制方式已成为绝对主流。
这种控制方式很容易在单片机控制中实现,从而为直流电动机控制数字化提供了契机。
五十多年来,直流电气传动经历了重大的变革。
首先,实现了整流器件的更新换代,从50年代的使用己久的直流发电机一电动机组(简称G-M系统)及水银整流装置,到60年代的晶闸管电动机调速系统(简称V-M系统),使得变流技术产生了根本的变革。
再到脉宽调制 (PulsewidthModulation)变换器的产生,不仅在经济性和可靠性上有所提高,而且在技术性能上也显示了很大的优越性,使电气传动完成了一次大的飞跃。
另外,集成运算放大器和众多的电子模块的出现,不断促进了控制系统结构的变化。
随着计算机技术和通信技术的发展,数字信号处理器单片机应用于控制系统,控制电路己实现高集成化,小型化,高可靠性及低成本。
以上技术的应用,使系统的性能指标大幅度提高,应用范围不断扩大。
由于系统的调速精度高,调速范围广,所以,在对调速性能要求较高的场合,一般都采用直流电气传动。
技术迅速发展,走向成熟化、完善化、系统化、标准化,在可逆、宽调速、高精度的电气传动领域中一直居于垄断地位[1]。
目前,国内各大专院校、科研单位和厂家也都在开发直流数字调速装置。
姚勇涛等人提出直流电动机及系统的参数辨识的方法。
该方法依据系统或环节的输入输出特性,应用最小二乘法,即可获得系统或环节的内部参数,所获的参数具有较高的精度,方法简便易行。