一类非线性系统的自适应时延观测器设计(英文)
自动控制原理第十章非线性控制系统
自动控制原理第十章非线性控制系统非线性控制系统是指系统动态特性不能用线性数学模型表示或者用线性控制方法解决的控制系统。
非线性控制系统是相对于线性控制系统而言的,在现实工程应用中,许多系统经常具有非线性特性,例如液压系统、电力系统、机械系统等。
非线性控制系统的研究对于实现系统的高效控制和稳定运行具有重要意义。
一、非线性控制系统的特点1.非线性特性:非线性控制系统的动态特性往往不能用线性方程或者线性微分方程描述,经常出现非线性现象,如饱和、死区、干扰等。
2.多变量关联:非线性系统动态关系中存在多个变量之间的相互影响,不同变量之间存在复杂的耦合关系,难以分离分析和解决。
3.滞后响应:非线性系统的响应时间较长,且在过渡过程中存在较大的像后现象,不易预测和控制。
4.不确定性:非线性系统通常存在参数变化、外部扰动和测量误差等不确定性因素,会导致系统性能变差,控制效果下降。
二、非线性控制系统的分类1.反馈线性化控制:将非线性系统通过适当的状态反馈、输出反馈或其它形式的反馈转化为线性系统,然后采用线性控制方法进行设计。
2.优化控制:通过建立非线性系统的数学模型,利用优化理论和方法,使系统达到其中一种性能指标最优。
3.自适应控制:根据非线性系统的参数变化和不确定性,设计自适应控制器,实时调整控制参数,以适应系统的动态变化。
4.非线性校正控制:通过建立非线性系统的映射关系,将测量信号进行修正,以减小系统的非线性误差。
5.非线性反馈控制:根据非线性系统的特性,设计合适的反馈控制策略,使得系统稳定。
三、非线性控制系统设计方法1.线性化方法:通过将非线性系统在其中一工作点上线性化,得到局部的线性模型,然后利用线性控制方法进行设计和分析。
2.动态编程方法:采用动态系统优化的方法,建立非线性系统的动态规划模型,通过求解该模型得到系统的最优控制策略。
3.反步控制方法:通过构造适当的反步函数和反步扩散方程,实现系统状态的稳定和输出的跟踪。
非线性系统的动态面自抗扰控制器设计及应用

非线性系统的动态面自抗扰控制器设计及应用李娟;邱军婷;高海涛【摘要】Focusing on the control problem of a class of nonlinear systems with strict feedback, by combination with the dynamic surface and active disturbance rejection control method, this paper proposes an active disturbance rejection control algorithm.The controller can produce the expected signal and its derivative with a tracking differentiator (TD) and estimate the external disturbance with an extended state observer (ESO), which can be compensated by the ESO.The controller can effectively avoid the phenomenon of differential explosion, which appears in the traditional backstepping control method, and reduce the dependence on accurate mathematical models for the control system.The controller design is based on the Lyapunov stability theory, the stability of the ESO and dynamic surface control are analyzed.A simulation of an unmanned underwater vehicle (UUV) model was conducted, which resulted in the track error in the range of (-4,4).The experimental results show effectiveness of the proposed approach.%针对一类具有严格反馈形式的非线性系统的控制问题,本文将动态面控制技术和自抗扰控制技术相结合,提出了动态面自抗扰控制算法.控制器包括三个功能:利用跟踪微分器给出期望信号以及其一阶导;利用扩张状态观测器估计外界扰动;扰动补偿.该控制器有效避免了传统反步法中出现的"微分爆炸"现象,并避免了控制器设计对系统数学模型的精确要求.依据李亚普洛夫稳定性理论进行控制器设计,并对扩张状态观测器和动态面部分进行了稳定性分析.通过水下无人航行器模型仿真,仿真结果表明:航迹误差在(-4,4)范围内,验证了该控制算法的有效性.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2017(038)008【总页数】7页(P1278-1284)【关键词】线性系统;动态面控制;跟踪微分器;观测器;扰动补偿;自抗扰控制;鲁棒性;水下无人航行器【作者】李娟;邱军婷;高海涛【作者单位】哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001;哈尔滨工程大学自动化学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TP273.2近年来,非线性系统的研究备受关注。
非线性观测器与滑模控制

非线性观测器与滑模控制在现代控制理论中,非线性观测器与滑模控制是两种常用的控制方法,它们具有很好的鲁棒性和适应性,广泛应用于各类系统的控制与观测中。
一、非线性观测器非线性观测器是一种通过测量系统输出和知道系统模型的某些特性来估计系统状态的方法。
它的主要思想是通过对系统的输出进行观测,结合系统模型、测量数据以及数学方法,估计出系统的状态信息。
非线性观测器通常分为两种类型:确定性观测器和自适应观测器。
确定性观测器是基于系统的数学模型和测量数据,通过一定的数学运算来预测和估计系统的状态。
它的优点是精确度高,但需要事先了解系统的数学模型和参数信息。
在一些具有稳定的系统模型和已知参数的应用中,确定性观测器可以提供高效准确的状态估计。
自适应观测器是一种适应系统动态特性和模型不确定性的观测方法。
它通过对系统输出进行连续的观测和适应性参数估计,实时地调整观测器的参数,使其能够适应系统的变化和不确定性。
自适应观测器具有较强的适应性和鲁棒性,在系统模型和参数不确定的情况下,仍能够提供较好的状态估计。
二、滑模控制滑模控制是一种基于滑动模态的非线性控制方法。
它的核心思想是通过构造一个滑动面,使系统状态在这个滑动面上滑动,并通过控制器的设计来实现对滑动过程的控制。
滑模控制具有很好的鲁棒性和抗干扰能力,对于系统模型不准确或存在不确定性的情况下仍能保持较好的控制性能。
滑模控制的基本步骤包括滑模面的设计、滑模控制律的构造和滑模开关函数的设计。
其中,滑模面的设计是滑模控制的核心,它既要保证系统的稳定性,又要使系统的响应速度和鲁棒性得到优化。
滑模控制律的构造是通过设计适当的控制算法,使系统状态在滑模面上滑动,并实现对系统状态的控制。
滑模开关函数的设计是为了实现滑模控制的切换和保持。
三、非线性观测器与滑模控制的结合非线性观测器与滑模控制可以结合起来,形成一种更加鲁棒和适应性强的控制方法。
在这种结合方法中,非线性观测器用于估计系统的状态信息,而滑模控制用于实现系统的控制。
一类不确定非线性系统的渐进稳定控制器设计
1
( 7 )
式 中: A 是 巳知 的 系统 矩 阵 ; B 是 已知 的 系统 输 入 矩 阵 , C
( 3 ) < o , S 1 l — s l 2 — l S 1 2 < 0
2
若 X 和 Y 为 适 当 维数 的矩 阵 . 那 么 对 于 给 定 的 标 量 e > O
L o W C A R B o N Wo R L D 2 0 1 3 , l 2
能源 ・ 电力
一
类不确定非线性系统的渐进稳定控制器设计
伟 , 吴妍妮 2
吴
ቤተ መጻሕፍቲ ባይዱ
( 1 . 中国能源建设集 团安徽省电力 设计 院, 合肥 2 3 0 6 0 1 ; 2 . 安徽大学 , 安徽省 合肥 2 3 0 6 0 1 )
3 . 3 引理 3
给 定适 当 维数 矩 阵 M, N, E和 F, 且 ≤I , 那 么对 于 给 定
的标 量 > O , 有 如 下不 等 式 成 立 :
E + M f N+ N 个 ≤E + MM N T N ( 9 )
c h i t z非 线性 系统 的全 局 稳 定控 制 器 的设 计 算 法 。通 过 构 造 合
适的 L y a p u n o v函数 . 并 结合 L MI 转化技巧 . 我 们 给 出 了一 类
3 . 2 引理 l ( S c h u r 补性质 )
L i p s c h i t z非 线性 系统 稳 定控 制 器 的设 计 算 法 。 最后 , 我 们 通 过 给 出的 一 个数 值 示 例 来验 证 我们 所 给 方 法 的有 效 性 和 可行 性 。
1 前 言
目前 .针 对 含 有 满足 L i p s c h i t z 全 局 非 线 性 条 件 的 非 线 性 项 的 非 线 性 系统 已经得 到 了广 泛 的 关 注和 研 究 。在 【 1 I 中, 作 者 研 究 了在 输 入 不 确 定 的情 况 下 的 一 类 L i p s c h i t z非 线 性 系统 的 无 源控 制 问 题 : 本文【 究 了一 类 含 有 L i p s c h i t z非 线 性 项 的 奇 异 非 线 性 系统 的 H∞ 观 测 器 的设 计 问题 ; 基于 L MI 方法. 在网 中 的作 者 们研 究 了 L i p s c h i t z离散 奇 异 系统 的 观 测 器设 计 问题 。
一类具有时延和数据包丢失的网络非线性控制系统
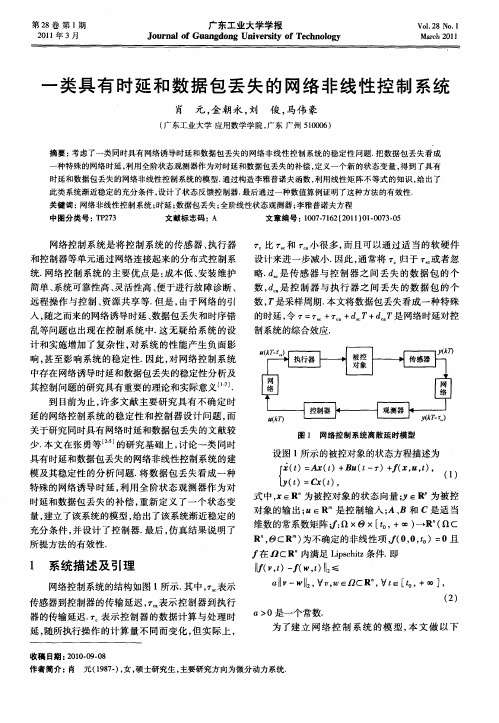
关于研究 同时具有网络时延和数据包丢失的文献较 少. 本文在张勇等 刮的研究基础上 , 讨论一类 同时 具有时延和数据包丢失 的网络非线性控制系统的建 模及其稳定性 的分析问题. 将数据包丢失看成一种
图 1 网络控 制系统 离散延时模型
设 图 1所示 的被控对 象 的状态 方程 描述 为
网络 控制 系统 是 将 控 制 系 统 的传感 器 、 行器 执
比 7 和 r 小很多 , - 。 而且可 以通过适 当的软硬件
设计 来进 一 步减 小 . 因此 , 常将 归于 或 者忽 通
和控制器等单元通过网络连接起来 的分布式控制系 统. 网络 控 制 系统 的主 要优 点 是 : 本 低 、 装 维 护 成 安 简单 、 系统可靠性高 、 灵活性高、 便于进行故障诊断 、 远程操作与控制 、 资源共享等. 但是 , 由于网络的引 入, 随之而来的网络诱导时延 、 数据包丢失和时序错 乱等问题也出现在控制系统中. 这无疑给系统的设 计和实施增加了复杂性 , 系统 的性能产生负面影 对 响, 甚至影响系统的稳定性. 因此 , 网络控制系统 对 中存在网络诱导时延和数据包丢失的稳定性分析及 其控制问题的研究具有重要的理论和实际意义【 J J. 到 目前为止 , 许多文献 主要研究具有不确定时
』 =x ) 曰(一), ,t 1 )A ( +l 7+( u ) ) ( l . x ,,(
1 系统 描 述 及 引 理
网络控制系统的结构如图 1 所示. 其中, 下 表示 传感器到控制器 的传输延迟 , 丁 表示控制器到执行
l 1t 一 ( , I L , ) ,W t I f , ( )2 ≤ 口 l 一‘ , v J ’I V , /cR , ∈[ + o , ’ , , I 2 ∈2 Vt , o]
基于观测器设计的随机非线性时滞系统模糊自适应动态面控制
了非线 性观测器使其对系统 的状态进行估计 ,设计模糊状态观测器估计 不可测状态 。利用所设计的观测器 ,动态 面控制 技术 以及 自适应 b c s p ig控制方法 ,设计 了一 种 自适应 输出反馈控制 器。并且证 明了闭环随机系统在 akt pn e
概率 意义下半全局一致最终有界稳定 。此外 ,选 择合适的参数还能使观测误差和系统输出任意的小 。仿真实例验
证 了提 出 方 案 的 有 效 性 。
关键 词:随机非线性时滞系统 ;模糊 自适应控制 ;模 糊状 态观 测器 ;动态面控制 技术 中图分类号 :T 1 P3 文献标 识码:A 文章编号 :17 .2 1 .1) 1 0 1 8 6 4 6 , 2O . 0 . 3 o . 0 . 0
d sg e o si t gteu me s r ds ts Ut iigt ed sg e z ys t b e e n y a i e i d fre t n mai n a u e t e . izn e i df z t eo sr ra dd n m c n h a l h n u a v
LI u , ONG h o- e g eT Y S a 一h n c
( ce c le e La nn iest o eh oo y Jn h u1 0 , ia S in eColg , io igUnv ri fT c n lg ,iz o 2101 Chn ) . y
基于非光滑控制的一类不确定非线性系统的输出调节
基于非光滑控制的一类不确定非线性系统的输出调节程鹏杰;孟桂芝【摘要】Aiming at the output regulation problem of an nonlinear system,transformation of coordinates is adopted to convert that to a stabilization model.A linear internal model equation with error item is designed based on external system information.Nonsmooth analysis theory and dynamic surface method are introduced in,combining with Backstepping design method and Lyapunov method,to propose a nonsmooth state controller,so as to avoid the problem that virtual controls must be smooth function in Backstepping design.The proposed nonsmooth controller can keep all signals in the closed-loop systems being uniform and ultimatly bounded with the tracking error arbitrary small.The simulation results verify the effectiveness of the proposed controller.%针对一类具有不确定性的非线性系统的输出调节问题,通过坐标变换将其转换为镇定问题,利用外系统信息设计出具有误差项的线性内模,引入非光滑分析理论和动态面法,结合Back-stepping设计方法和Lyapunov法给出了状态反馈的非光滑控制器,避免了Backstepping设计方法中所存在的“虚拟控制必须为光滑函数”问题,所提出的控制器能够实现整个闭环系统的信号均一致最终有界且跟踪误差可以保证在预设的任意小范围内,数值仿真结果表明所提出的非光滑控制器的有效性.【期刊名称】《黑龙江大学自然科学学报》【年(卷),期】2017(034)004【总页数】7页(P492-498)【关键词】内模;非光滑控制;Backstepping技术;Lyapunov方法【作者】程鹏杰;孟桂芝【作者单位】北京交通大学机械与电子控制工程学院,北京100044;哈尔滨理工大学理学院,哈尔滨150080【正文语种】中文【中图分类】TP271输出调节问题又称为伺服问题,是近年来非线性控制理论研究的热点问题之一[1-3]。
一种含扰动项的非线性系统执行器故障估计方法
收稿日期:2020-01-11修回日期:2020-03-11基金项目:2019年辽宁省教育厅科学研究经费资助项目(L201906)作者简介:孙延修(1981-),男,河北邯郸人,硕士,副教授。
研究方向:非线性系统观测器。
*摘要:现代控制系统的安全性与可靠性是各领域研究的热点之一,系统故障诊断与估计的方法越来越引起人们的重视。
针对一类含有外部扰动的非线性系统,研究了系统执行器故障估计问题。
通过设计一种增广系统观测器对原系统中的执行器故障进行估计;考虑到系统中的非线性扰动项,利用线性矩阵不等式(LMI )方法给出了观测器存在的充分条件并保证误差系统渐近稳定。
同时,通过设定性能指标减少了外部扰动对执行器故障估计的影响;通过数值算例验证了执行器故障估计方法的有效性,表明该估计方法能够较好的对系统中的执行器故障进行鲁棒估计。
关键词:外部扰动,非线性系统,执行器故障,线性矩阵不等式,状态观测器中图分类号:TP391.9文献标识码:ADOI :10.3969/j.issn.1002-0640.2021.03.007引用格式:孙延修.一种含扰动项的非线性系统执行器故障估计方法[J ].火力与指挥控制,2021,46(3):38-42.一种含扰动项的非线性系统执行器故障估计方法*孙延修(沈阳工学院基础课部,辽宁抚顺113122)A Method of Actuator Fault Estimation forNonlinear System With Disturbance TermSUN Yan-xiu(Basic Course Department ,Shenyang Institute of Technology ,Fushun 113122,China )Abstract :The safety and reliability of modern control system is one of the hotspots in variousfields ,more and more attention has been paid to the fault diagnosis and estimation of the system.For a class of nonlinear systems with external disturbances ,the problem of actuator fault estimation is studied.Firstly ,an augmented system observer is designed to estimate actuator faults in the original system ;Secondly ,considering the nonlinear disturbance term in the system ,the sufficient conditions for the existence of the observer are given by using the LMI method to ensure the asymptotic stability of the error system ,at the same time ,the influence of external disturbance on actuator fault estimation is reduced by setting performance index.Finally ,the effectiveness of the actuator fault estimation method is verified by a numerical example ,which shows that the method can estimate the actuator fault in thesystem robustly.Key words :external disturbance ,nonlinear system ,actuator failure ,linear matrix inequality ;state observerCitation format :SUN Y X.A method of actuator fault estimation for nonlinear system with disturbance term [J ].Fire Control &Command Control ,2021,46(3):38-42.0引言目前,控制系统对稳定性及可靠性的要求越来越高。
一类非线性扰动时滞系统的基于观测器的鲁棒控制
文 章编 号 � 1 0 0 9 4 4 9 0� 2 0 0 6� 0 2 0 0 0 3 0 3
一类非线性扰动时滞系统的基于观测器的鲁 棒控制
苗军霞 �戴平波
( 南京财经大学应用数学系 �江苏 南京 2 1 0 0 4 6) 要 �讨论了一类不确 定时滞系统的基于观测器的控制器设计问题 � 其中不 确定是非 线性时变的 . 在
� � 5
故 由� � � � �和 � �构 成的 增广 系统 为 1 4 5
� �E � � � � � � �� � F HI L� �� �� GI L �� � G�� �� �H#� � � 5 � 4 �E � � � � � �� � F HL C� �� � �� �H#� � �� �� 6 对 该增 广系 统构 造 L a � n o �函 数 � p T H 1 2 � � � �E�T � � M� �� �� � � �� P1 �� �� G� � � P2 �� �� G2 %
� 矩 阵� )为 时变 时滞 � )为 可微 的初 值函 数向 量 � 且满 足 � � #( � � J 为 非线 性时 变扰 动 � $(
( ) ) � ) ��( �( �H# � �� �%��( �H#( �) � 其 中% > 0 为给 定的 常数 对象 ( ) � 构造 满足 如下 形式 状态 方程 的状 态观 测器 及线 性无记 忆反 馈控 制律 1
第2 0 卷第 2 期 2 0 0 6年 6月
山西师范大学学报 ( 自然科学版) J o � � n a l o fS h a n � iN o � m a lU n i � e � � i � � N a � � � a l S c i e n c eE d i � i o n
关于非线性系统降维观测器设计方法的研究
关于非线性系统降维观测器设计方法的研究迟子孟;周磊;王秋琳;刘旭【摘要】利用线性矩阵不等式以及微分中值定理,解决了一类非线性系统观测器的设计问题.该方法无论在可微Lipschitz非线性系统中还是在一般的非Lipschitz非线性系统中都具有广泛的应用.【期刊名称】《哈尔滨师范大学自然科学学报》【年(卷),期】2015(031)005【总页数】3页(P1-3)【关键词】非线性系统;降维观测器【作者】迟子孟;周磊;王秋琳;刘旭【作者单位】天津财经大学珠江学院;天津财经大学珠江学院;天津财经大学珠江学院;天津财经大学珠江学院【正文语种】中文【中图分类】O231.20 引言在文献[1]中针对具有Lipschitz条件系统的降维观测器设计问题进行了讨论,但其结果却不能应用在非Lipschitz非线性系统的观测器设计问题中,其应用具有一定的局限性.对此,该文主要研究此类非线性系统观测器存在的充分条件,并为该类非线性系统的观测器设计提供新的解决方法.1 符号说明与研究背景1.1 符号说明对任意v=(η1,η2,…,ηn,y,u),ηi∈ Rn(i=1,2,…,n),y ∈ Rp,u ∈ Rm,定义对于正定矩阵P,令1.2 研究背景现考虑非线性系统具有如下形式:其中x(t)∈Rn,u(t)∈Rm,y(t)∈Rp,A∈Rn×n,C ∈Rp×n.函数Φ:Rn× Rp× Rm→Rn是关于x可微的非线性部分,并且Φ(x)满足同时具有下列形式假设C是行满秩的,且(A,C)是可观测的.值得注意的是,如果存在集合{cij;i,j=1,2,…,n}和{dij;i,j=1,2,…,n}使得而具有该条件的系统(1)的降维观测器设计问题在文献[1]中已经讨论并也提供了相应的解决方法.可见,该文所研究的非线性系统(1)具有更为广泛的应用性.为了方便讨论,对下面命题进行简单的论证.命题1 FP(μ)<0(∀μ∈D⊃VD)的充要条件是FP(μ)<0(∀v∈VD)(其中P是一个正定矩阵).证明由于Fp(Μ)是v∈D的一个仿射变换,利用凸集定理[2]该命题得证.文献[1]中定理1的证明过程中,使用了坐标变换,其中z1=(x1x2…xp)T=y该文中,同样有命题2 若C=(IP0)且对于=使得其中,则文献[1]中形如(12)的降维观测器可使得渐近趋于0.证明记x*=(p+1,p+2,…,n)T∈Rn-p,则不等式(4)左端第二行第二列的块矩阵为:其中同样采取坐标变换 z=Tx,其中 T=,其中z1=(x1,x2,…,xp)T=y∈Rn且z2∈Rn-p.那么,根据系统(1),有如下结果:用(5)式减去文献[1]中的(12)式的第一个式子,就能得到其中利用Lyapunov函数则其导数˙V有如下结果2 主要结果结合以上的两个命题,主要给出满足条件(2)式非线性系统降维观测器设计的好方法.定理如果系统(1)的非线性部分Φ(x,y,u)满足(2)式,若C=(Ip0)且存在增益矩阵K使得线性矩阵不等式存在对称正定解P,其中vi∈VD(i=1,2,…,l),FP(v)(v∈VD)由(6)式决定.则系统(1)有如下形式的降维观测器,即其中.(注:该降维观测器与文献[1]的降维观测器形式相同)证明对于任意v=(η1,η2,…,ηn,y,u),根据(8)式,对于每一个x,x∈Rn满足=x=和正定矩阵P=(pij)n×n∈Rn×n,都存在常数向量η1,η2,…,ηn∈Co(x,),ηi≠xi,ηi≠(i=1,2,…,n)使得下式成立等式(9)说明命题1和(10)意味着对于都满足根据命题2和(11)定理得证.参考文献[1]迟子孟,王秋琳,周磊.一类Lipschitz非线性系统降维观测器设计.哈尔滨师范大学自然科学学报,2014,4(30):1-4.[2]Boyd S.Vandenberghe L.Convex optimization with engineering applications.Stanford University Lecture Notes,2001:101-123.[3]董丽亚.一类非线性系统观测器设计的新方法.系统工程与电子技术,2009,1(31)153–157.[4]Yang Fuwen.Robust state estimation for linear state delayed and measurement- delaye systems with uncertainties[J].Control Theory and Applications,2003,20(2):211–216.[5]Zemouche A ,Doutayeb M ,Bara G.Observer design for non-linear systems:An approachbased on the differential mean value theorem [C].Proc.of the 44th IEEE Conference on Decision and Cont rol and European Cont rol Conf erence,2005:6353-6358.。