HEV用锂离子电池动态模型参数辨识方法研究_熊瑞
锂动力电池动态一致性评价方法的研究

锂动力电池动态一致性评价方法的研究摘要锂动力电池,以其比容量高和长循环寿命,在动力电池领域作为技术革新的重要支持。
尽管制造工艺以及使用管理技术不断提高,在实际的使用中,都需要将各单体电池,通过串联或并联的方式成组使用,而在长期的使用后,电池组都会出现性能大幅衰减的现象。
经研究表明,这是由于构成电池组的单体电池在一致性上出现了明显的差异。
因此,为了让动力电池组在长期使用过程中,都能一直保持有较高的性能,延长整个电池组的使用寿命,就需要对组内单体电池的一致性有较好的判断,以便于电池管理系统(BMS)以及用户对其进行及时维护。
对动力电池的一致性概念进行了研究,经过大量的实验,并对实验数据进行分析发现在多个性能参数中,电池的荷电状态(SOC)和动力电池的工作电压(CCV)能够全面的显示电池当前的状态,同时也是电池动态特性的集中体现,可以作为评价电池一致性评价的技术指标。
本文建立并改进了动力电池的等效模型,在模型建立过程中,引入了权A m,来更好地反映这一差异的存在。
文中采用平方根容积卡尔曼值向量()滤波法,结合强跟踪滤波理论(SCKF-STF)对SOC进行预测,给出了预测结果和误差分析,在算法的前端设计并加入了多重滤波算法,对混入的噪声进行处理,并结合针对一致性差异的等效模型,进一步提高算法的预测精度,同时加入了仿真分析对方案的可行性进行了验证。
文中采用数理统计的F分布概率密度函数实现用SOC和工作电压对一致性评价的综合分析。
根据动力电池的实际参数,给出相应对概率密度函数的描述,进而得到概率密度曲线,通过设定一致性预警阈值,得出符合预期的结果区域,将实验数据代入函数表达式后得出的计算结果,如果计算结果在该区域中,则可以得出该组实验电池的一致性较好的结论。
关键词锂动力电池;SOC预测;一致性评价;统计学原理- I -Evaluation on the Dynamic Consistency of Li-IonPower BatteryAbstractLi-ion power battery has been the solid foundation for technology innovation within power battery field with its unique discharge specific capacity and long cycle life. Cell batteries should be connected in series to be applied for large appliance, though the rapid development in crafts and management. However, the general performance of the formed battery pack may suffer a apparent decay after a long term application, due to the deterioration in the consistency of the battery based on large quantities of research. A better evaluation on the consistency of battery is the very basis to keep better performance of the battery, to extend the cycle life, as well as to give advantage to battery management system (BMS) with maintenance.Various experiments are conducted to get to essence of consistency of battery, as to analyze the performance index of power battery for the typical ones for the current state of battery in this paper. State of charge, as well as SOC and closed circuit voltage (CCV) are selected with the research results for the performance index of consistency.The equivalent circuit model is established and improved with weightA m is involved to embrace the discrepancy in the very battery of the victor ()formed battery pack in the paper. Square-Cubature-Kalman-Filter, combined with Strong-Tracking Filter (SCKF-STF) algorithm is involved for SOC prediction with corresponding simulation and error analysis. To obtain SOC prediction result with higher precision, multiple filter algorithm is designed ahead of the SCKF-STF algorithm to tackle with the involved noise with input data. The comparison simulation of SOC prediction is conducted with optimized SCKF-STF algorithm and improved model. The corresponding simulation result and error analysis is conducted with the single SCKF-STF for the adtantage of the optimized algorithm.- II -The probability density function of F-distribution with principle of statics is involved to obtain the evaluation on consistency of battery with SOC and CCV as performance index. The corresponding description for probability density function is deducted with actual index of experimented battery, as well as the probability density curve. A pre-designed trust zone can be settled on the curve with designed warning value. The zone of which is applied to make comparison with the result from deducted function with experiment data to evaluate the general consistency of the experimented battery.Keywords Li-ion power battery, Prediction for SOC, Evaluation of the consistency of battery, Principle of statistics- III -目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 课题研究的目的及意义 (1)1.2 SOC预测方法的现状研究 (2)1.2.1 SOC预测方法的发展趋势 (3)1.2.2 常用SOC预测的算法综述 (3)1.3 锂动力电池一致性评价的现状研究 (5)1.3.1 一致性评价的研究方向 (5)1.3.2 基于参数的评价方法综述 (5)1.4 本文主要研究内容 (6)第2章锂动力电池不一致性的研究 (8)2.1 电池一致性的概念阐述 (8)2.2 不一致性的产生机理 (8)2.2.1 分析生产和储存环节 (8)2.2.2 分析成组使用环节 (10)2.3 判定电池不一致的条件 (11)2.3.1 性能参数分析 (11)2.3.2 状态参数分析 (12)2.4 电池不一致的危害 (12)2.5 改善电池不一致的方法 (13)2.5.1 改善分选环节 (13)2.5.2 改善电池均衡环节 (14)2.5.3 其它方法 (15)2.6 本章小结 (15)第3章锂动力电池SOC预测算法的研究与改进 (16)3.1 SOC预测的影响因素分析 (16)3.2 电池等效模型的建立 (17)3.2.1 等效模型的数学推导 (18)3.2.2 针对一致性评价的模型修正 (21)3.3 SCKF-STF算法的研究与仿真 (22)3.3.1 强跟踪滤波算法研究 (23)3.3.2 动力电池SOC的预测 (24)3.3.3 结果仿真与误差分析 (27)3.4 基于参数和模型修正的电池SOC预测及仿真 (29)3.4.1 性能参数修正 (29)3.4.2 对SCKF-STF预测算法的优化 (30)3.4.3 算法的仿真分析 (34)3.5 本章小结 (35)第4章基于F分布的动力电池动态一致性评价 (36)4.1 常用动态一致性评价方法的分析 (36)4.1.1 工作电压标准差评价法 (36)4.1.2 SOC离散度评价法 (37)4.2 基于F分布的动态一致性评价方法 (39)4.2.1 工作电压离散度的统计学分析 (39)4.2.2 电池不一致性的数学描述 (40)4.2.3 基于F分布的方法描述与数学推导 (41)4.3 电池一致性评价方法的验证 (44)4.4 本章小结 (46)结论 (47)参考文献 (48)攻读学位期间发表的学术论文 (53)致谢 (54)第1章绪论近年来尽管行业发展的速度逐年攀升,但快速发展所带来的环境破坏与严重污染不得不让人们关注的重点转向资源的可持续利用和能源的清洁可再生方面[1]。
HEV锂离子串联电池组混合均衡策略研究
多绕 组 变 压 器 转 换 到 电 池 B2,Q1 由 BMS 输 出 PWM 控制导通,占空比为 D,周期为 Ts;Q2 始终 处 于 关 断 状 态 .工 作 原 理 如 下 .
a.模 式 1.在 开 关 Q1 的 Ts 的 导 通 时 间 内,
电感 L1 和初 级 绕 组 开 始 储 能,能 量 由 VB1 提 供, 电 感 电 流im (t)线 性 上 升 ,即im (t)=Im (0)+V1t/
a.模式1.当 开 关 Q 以 一 个 固 定 占 空 比 (由 BMS控制)导通时,在导通时间 内模 式 1 开始.通 过第一个和最后一个单体的磁化电流为
IKg1
=IKgn
=
V t stack s NoffLm
,
式中:Noff是关断的 充 电 控 制 开 关 的 数 量;Vstack是
串联 电 池 组 的 电 压;ts 是 主 MOSFET 开 关 的 导
Abstract The imbalance of HEV (hybrid-electric vehicle)batteries is one of the major reasons for their performance and lifetime descending.Thus,circuit and principle of multi-winding transformer magnetic equalization model and multiple primary winding DC-DC (direct current)equalization model were studied.In order to get a better balance effect,a two stages balance system was proposed.The first stage is the multi-winding transformer magnetic equalization model,and the second stage is the multiple primary winding transformer equalization model.Experimental results show that two stages balance system can reduce the imbalance of HEV batteries effectively which is suitable for HEV vehi- cles. Key words storage battery;hybrid-electric vehicle;lithium-ion batteries;multi-winding transformer
纯电动汽车用锂离子电池的建模和模型参数识别

本文由鱼松树贡献pdf文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第25卷第1期2100年3月电力科学与技术学报JoURNALOFEIECTRIPC0WERCISENCEANDCHN0LOGYTEVo.5N0112.Ma.01r2O纯电动汽车用锂离子电池的建模和模型参数识别姜久春,文锋,温家鹏,郭宏榆,玮时(北京交通大学电气工程学院。
京104)北004摘要:极化电压是电池状态估算的重要参数,但不能直接测量.采用阻容模型分析,出极化电压模型阶次与极指化深度密切相关,出一种极化电压的快速识别方法,出变电流放电情况下电池的去极化时间和容量的计算方提给法,采用FS模拟工况对新、并UD旧电池和不同厂家的电池进行测试,验证了该方法的有效性和可行性,电池状为态的准确估算提供了数据支持.关键词:锂离子电池;数学建模;模型参数识别;去极化;最小二乘法拟合中图分类号:M1T92文献标识码:A文章编号:6394(000—07817—1021)16—00Liinbteymoeigado-ndl ?oatrdlnnn?iemoe-lprmeesieiiainfrPEVaatrdntfctooJANGi—hn,WENeg,WENi—eg,GUOn-uHIWeIJucuFnJapnHogy,Si(colflcraniergoeigJoogUnvriyeig104,iaShoetilgneifinitniest.Bin004Chn)oEcEnBjajAbsrc:lrztootgeinipraeprmeeorbatrttsiain,wheestatPoaiainvlasamotncaatrfteysausetmtora,icntbesrddrcl.Th,rssac-aairmoesaotdfrplrztootgta’emaueietyeeitnecpctdlidpeooaiainvleoamoeig,acoecnetnbtehrefplrztnvlaemoenoaiaindlnlsonciewenteodrooaiaiotgdladplrztooodphihnpitdotnatplrztnvlgetiainmehdipooentietsteoneu,adafsoaiaioteinicttosrpsdihsoadfopprThacltnmehdfrbteydplraintmeadcpctspeetdihae.ecluaitooatreoaitinaaiirsnenteozoycniinohnigcretdshreThto’aiiyadfaiitoeadaeodtfcagnurnicag.oemehdSvltnesblyfrnwngddibteisoieetmauatrereieyFatrefdfrnnfcoisaevrfdbUDSsmuain.Theutrvdaafiiltoserslspoiedtspotfrteetmainoatrttsuprohsitofbteysau.Keod:ioatrywrsL—nbtey;mahmaismoeig;moeaatrdniiain;dplrz—itetcdlndlprmeesietctfoeoaiatn;latsur-ehdftnioes-qaemtoiigt出于能源和环境的考虑,电动汽车在各国政府和汽车制造商的推动下得到了快速的发展,中纯其电动汽车以其能真正实现“零排放”成为电动汽车而的重要发展方向.离子电池以其优良的性能成为锂收稿日期:O03121一O—0基金项目:国家高技术研究发展计划(83计划)20A1A0)“6”(07AI13通讯作者:姜久春(93,,17一)男博士,教授,博士生导师,主要从事电动汽车及储能电池管理系统及充电技术、风能太阳能以及分布式发电系统的研究Ema:jn ̄bt.d.n-ljigjueuelca68电力科学与技术学报2100年3月新一代电动汽车的理想动力源,由于抗滥用能力但差,锂离子电池在电动汽车上使用的安全性和寿命是人们关注的焦点.电池模型是电池状态估算、性能分析、科学评价和高效使用的基础,是从电池外部特性到内部状态的桥梁,历来受到研究人员的重视和广泛关注.电化学研究人员建立了多种能对电池性Rn能进行全面描述的电化学模型[,由于计算复1但]杂,电池的材料、与配方和工艺等参数密切相关,所以难以实现;电学研究人员提出了便于系统仿真和验证的电学模型[。
《基于数据驱动的锂离子动力电池组RUL预测研究》

《基于数据驱动的锂离子动力电池组RUL预测研究》篇一一、引言随着电动汽车、储能系统等领域的快速发展,锂离子动力电池组作为其核心部件,其性能与寿命的预测显得尤为重要。
剩余使用寿命(RUL)预测是电池管理系统中一项关键技术,对于提高电池使用效率、降低维护成本、确保系统安全运行具有重大意义。
本文旨在通过数据驱动的方法,对锂离子动力电池组的RUL 进行预测研究。
二、锂离子动力电池组概述锂离子动力电池组以其高能量密度、长循环寿命、无记忆效应等优点,广泛应用于电动汽车、储能系统等领域。
然而,电池的性能会随着使用过程的进行而逐渐衰减,导致电池的RUL成为关注焦点。
三、数据驱动的RUL预测方法1. 数据采集与预处理:首先,需要收集锂离子动力电池组在使用过程中的相关数据,包括电压、电流、温度、内阻等。
对数据进行清洗、整理和标准化处理,以便后续分析。
2. 特征提取:从预处理后的数据中提取出与电池性能和寿命相关的特征,如容量衰减、内阻变化等。
3. 建模与算法选择:选择合适的机器学习或深度学习算法,如循环神经网络(RNN)、长短期记忆网络(LSTM)等,建立电池RUL预测模型。
4. 模型训练与优化:使用历史数据对模型进行训练,通过调整模型参数、引入优化算法等手段,提高模型的预测精度。
5. RUL预测:将训练好的模型应用于新的电池数据,预测其RUL。
四、实验与分析1. 实验设置:选取一定数量的锂离子动力电池组,记录其在使用过程中的数据,作为实验数据集。
2. 特征选择与模型训练:根据特征提取方法,选择合适的特征,建立RUL预测模型,并进行训练。
3. 结果分析:对比模型预测的RUL与实际RUL,分析模型的预测精度。
同时,对不同算法、不同特征组合的模型进行对比,评估各种方法的优劣。
五、结果与讨论通过实验分析,我们发现基于数据驱动的RUL预测方法能够较为准确地预测锂离子动力电池组的RUL。
其中,LSTM网络在处理时序数据方面表现出较好的性能,能够有效地捕捉电池性能变化的趋势。
基于VFFRLS_联合AUKF_的锂电池SOC_估计
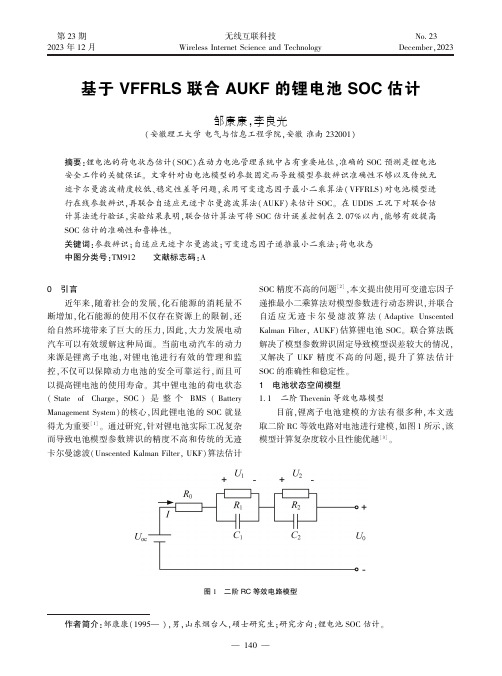
第23期2023年12月无线互联科技Wireless Internet Science and TechnologyNo.23December,2023作者简介:邹康康(1995 ),男,山东烟台人,硕士研究生;研究方向:锂电池SOC 估计㊂基于VFFRLS 联合AUKF 的锂电池SOC 估计邹康康,李良光(安徽理工大学电气与信息工程学院,安徽淮南232001)摘要:锂电池的荷电状态估计(SOC )在动力电池管理系统中占有重要地位,准确的SOC 预测是锂电池安全工作的关键保证㊂文章针对由电池模型的参数固定而导致模型参数辨识准确性不够以及传统无迹卡尔曼滤波精度较低㊁稳定性差等问题,采用可变遗忘因子最小二乘算法(VFFRLS )对电池模型进行在线参数辨识,再联合自适应无迹卡尔曼滤波算法(AUKF )来估计SOC ㊂在UDDS 工况下对联合估计算法进行验证,实验结果表明,联合估计算法可将SOC 估计误差控制在2.07%以内,能够有效提高SOC 估计的准确性和鲁棒性㊂关键词:参数辨识;自适应无迹卡尔曼滤波;可变遗忘因子递推最小二乘法;荷电状态中图分类号:TM912㊀㊀文献标志码:A 0㊀引言㊀㊀近年来,随着社会的发展,化石能源的消耗量不断增加,化石能源的使用不仅存在资源上的限制,还给自然环境带来了巨大的压力,因此,大力发展电动汽车可以有效缓解这种局面㊂当前电动汽车的动力来源是锂离子电池,对锂电池进行有效的管理和监控,不仅可以保障动力电池的安全可靠运行,而且可以提高锂电池的使用寿命㊂其中锂电池的荷电状态(State of Charge,SOC )是整个BMS (BatteryManagement System)的核心,因此锂电池的SOC 就显得尤为重要[1]㊂通过研究,针对锂电池实际工况复杂而导致电池模型参数辨识的精度不高和传统的无迹卡尔曼滤波(Unscented Kalman Filter,UKF)算法估计SOC 精度不高的问题[2],本文提出使用可变遗忘因子递推最小二乘算法对模型参数进行动态辨识,并联合自适应无迹卡尔曼滤波算法(Adaptive UnscentedKalman Filter,AUKF)估算锂电池SOC㊂联合算法既解决了模型参数辨识固定导致模型误差较大的情况,又解决了UKF 精度不高的问题,提升了算法估计SOC 的准确性和稳定性㊂1㊀电池状态空间模型1.1㊀二阶Thevenin 等效电路模型㊀㊀目前,锂离子电池建模的方法有很多种,本文选取二阶RC 等效电路对电池进行建模,如图1所示,该模型计算复杂度较小且性能优越[3]㊂图1㊀二阶RC 等效电路模型0411.2㊀电池模型参数在线辨识㊀㊀在系统辨识中,递推最小二乘法(Recursive Least Squares,RLS)是一种常用的估计算法[4]㊂为了降低历史数据的影响并适应锂电池复杂的工作状态,基于遗忘因子的递推最小二乘法(Forgetting Factor Recursive Least Squares,FFRLS)被提出用于模型参数辨识[5]㊂通过引入遗忘因子,可以动态调整历史数据的权重㊂然而,在一些情况下,固定的遗忘因子可能无法满足需求㊂为了克服这个问题,本文采用可变遗忘因子递推最小二乘法(Variable Forgetting Factor Recursive Least Squares,VFFRLS)对电池模型进行参数辨识㊂2㊀电池SOC估计2.1㊀UKF算法原理㊀㊀卡尔曼滤波(Kalman Filter,KF)常用于线性系统,实现过程则是通过利用上一时刻的最优结果来预测当前时刻的值,并且结合观测值对当前时刻的值进行修正,从而得到最优结果㊂为使其应用于非线性系统,UKF被广泛应用㊂UKF算法的主要思想是通过UT变换,以一定的规律对采样点进行采样和赋予权重,从而近似地获得采样点附近的均值和方差㊂这样的近似方法能够有效地估计状态变量的分布,并在非线性系统中表现出较高的精确性和稳定性[6]㊂2.2㊀自适应调节策略㊀㊀AUKF通过对过程噪声和观测噪声的动态调整使得滤波器能够更加适应复杂工况,提升算法模型的鲁棒性,同时提高了精确度㊂2.3㊀电池SOC联合估计㊀㊀根据二阶RC等效电路建立起来的锂电池等效模型,通过将VFFRLS和AUKF联合估计㊂首先通过二阶RC等效电路模型得到模型的回路状态方程,然后同VFFRLS算法对模型参数进行在线辨识,得到的参数带入AUKF的状态矩阵和噪声矩阵,获得SOC㊂通过OCV-SOC曲线对VFFRLS算法进行调整㊂3㊀实验验证与分析㊀㊀为了检验VFFRLS-AUKF算法在估算锂电池SOC方面的精确度,在UDDS工况下,采用VFFRLS-UKF和VFFRLS-AUKF2种算法进行SOC估算㊂锂电池的SOC估计结果如图2所示,SOC估计的误差情况如图3所示㊂如图2所示,VFFRLS-UKF和VFFRLS-AUKF算法都能较好地跟随电池的真实SOC,从图中可以看出VFFRLS-AUKF更接近于真实的SOC,说明AUKF算法通过对噪声的自适应调整,能够适应更加复杂的工况,提高了算法的精确度和鲁棒性㊂从图3可以看出,在复杂工况下,UKF和AUKF的估计误差都波动较大,这主要是由UDDS工况电流变化引起的,且没有引起发散,都具有良好的收敛性,但VFFRLS-AUKF算法的误差范围明显更小,收敛性更好㊂为了更直观地辨别2种算法的优劣,UDDS工况下的VFFRLS-UKF和VFFRLS-AUKF的绝对误差(MAE)和均方根误差(RMSE)如表1所示㊂表1㊀UDDS工况下VFFRLS-UKF和VFFRLS-AUKF算法的MAE㊁RMSE对比SOC估计方法MAE RMSE VFFRLS-UKF0.0148360.016568 VFFRLS-AUKF0.0077290.009285图2㊀UDDS工况下电池SOC估计对比曲线图3㊀UDDS工况下电池SOC估计误差对比曲线 1414 结语㊀㊀锂电池SOC的准确估计在整个BMS系统中至关重要㊂准确的SOC估计不仅可以确保电动汽车的行驶安全,还可以延长锂电池的使用寿命㊂通过建立二阶RC等效电路模型,获得状态方程和观测方程㊂本文采用VFFRLS算法对系统参数进行辨识,以解决传统的FFRLS算法中参数固定导致模型精度下降的问题㊂然后,将辨识出的参数与AUKF相结合,在模型的准确性基础上,降低了系统噪声和观测噪声的影响,提高了算法的精度和鲁棒性㊂此方法可以提供准确可靠的锂电池SOC估计结果㊂参考文献[1]卢云帆,邢丽坤,张梦龙,等.基于UKF-AUKF锂电池在线参数辨识和SOC联合估计[J].电源技术, 2022(10):1151-1155.[2]张利东,牛志刚,刘瑛.遗传算法优化神经网络整包电池SOC估计模型[J].机械设计与制造,2023(2):189-194.[3]韦仲爽,侯巍,赵彦,等.基于扩展卡尔曼滤波算法的磷酸铁锂电池荷电状态估计[J].中山大学学报(自然科学版),2023(5):92-100.[4]高博洋,刘广忱,张建伟,等.无迹卡尔曼滤波法估计锂离子电池的SOC[J].电池,2021(3): 270-274.[5]刘鹏,李云伍,梁新成.基于遗忘递推最小二乘与自适应无迹卡尔曼滤波的锂电池SOC估计[J].汽车技术,2022(2):21-27.[6]董祥祥,武鹏,葛传九,等.基于参数在线辨识和SVD-UKF的锂电池SOC联合估计[J].控制工程, 2022(9):1713-1721.(编辑㊀王雪芬)SOC estimation of estimated lithium battery based on VFFRLS combined with AUKFZou Kangkang Li LiangguangSchool of Electrical and Information Engineering Anhui University of Science andTechnology Huainan232001 ChinaAbstract The state of charge estimation SOC of lithium battery plays an important role in the power battery management system and accurate SOC prediction is the key guarantee for the safe operation of lithium battery.Aiming at the problems such as insufficient accuracy of model parameter identification due to the fixed parameters of the battery model and low accuracy and poor stability of the traditional unscented Kalman filter this paper uses the variable forgetting factor least square algorithm VFFRLS to identify the battery model online parameters and then combines the adaptive unscented Kalman filter algorithm AUKF to estimate SOC.The experimental results show that the joint estimation algorithm can control the SOC estimation error within2.07% which can effectively improve the accuracy and robustness of SOC estimation.Key words parameter identification adaptive untraced kalman filtering variable forgetting factor recursive least squares method state of charge241。
电动汽车锂电池戴维南等效电路模型参数辨识研究
K e y wo r d s: e l e c t r i c v e h i c l e ; e q u i v a l e n t c i r c u i t ; p u l s e me t h o d; l e a s t s q u a r e me t h o d
引 用格式 : 李百华 , 郭灿彬 , 钟其水 , 等 .电动汽车锂 电池戴维南等效电路模 型参数辨识研究 [ J ] . 微型机与应用 , 2 0 1 7 , 3 6 ( 1 ) : 8 3 - 8 5 , 8 8 .
Re s e a r c h o n p a r a me t e r i d e n t i ic f a t i o n o f Th e v i n i n e q u i v a l e n t c i r c u i t
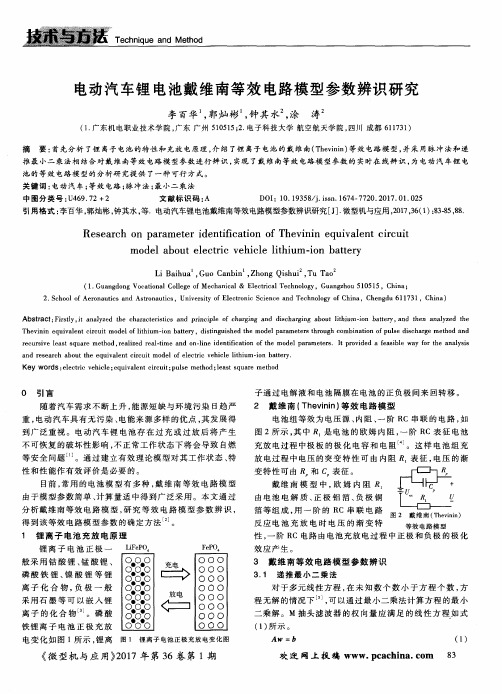
摘 要 : 首 先分析 了锂 离子 电池 的特 性 和充放 电原理 , 介绍 了锂 离子 电池 的戴维 南( T h e v i n i n ) 等 效 电路 模型 , 并采 用脉 冲 法和 递
推 最小二 乘 法相结 合对戴 维 南等效 电路模 型参 数进行 辨识 , 实现 了戴 维南等 效 电路模 型参 数 的 实时在 线辨 识 , 为 电动 汽 车锂 电
The v i n i n e qu i v a l e n t c i r c u i t mo d e l o f l i t hi u m— i o n ba t t e r y,di s t i n g u i s h e d t h e mo d e l pa r a me t e r s t hr o u g h c o mb i n a t i o n o f p ul s e d i s c ha r g e me t ho d a n d r e c ur s i v e l e a s t s q ua r e me t ho d, r ea l i z e d r e a l - t i me a nd on — l i n e i d e n t i f i c a t i o n o f t he mo d e l p a r a me t e r s .I t p r o v i de d a f e a s i bl e wa y f o r t h e a n a l y s i s
基于多时间尺度锂电池在线参数辨识及SOC_和SOH_估计
第40卷第5期Vol.40㊀No.5重庆工商大学学报(自然科学版)J Chongqing Technol &Business Univ(Nat Sci Ed)2023年10月Oct.2023基于多时间尺度锂电池在线参数辨识及SOC 和SOH 估计姚昌兴,李㊀昕,邢丽坤安徽理工大学电气与信息工程学院,安徽淮南232001摘㊀要:电池的荷电状态和健康状态是衡量电池续航和寿命的重要指标,为解决电池参数的时变性问题,提高电池SOC (State of Charge )估算精度,减少硬件计算量,提出一种多时间尺度在线参数辨识双扩展卡尔曼滤波联合算法㊂以18650三元锂电池为研究对象,采用基于二阶RC 等效电路模型的多时间尺度DEKF 算法,针对电池参数的慢变特性和状态的快变特性进行双时间尺度在线参数辨识和SOC 估算;通过联邦城市驾驶计划(FUDS )测试验证,得出多时间尺度DEKF 算法和传统离线辨识EKF 算法对SOC 估计的平均绝对误差分别为0.97%和2.46%,均方根误差为1.19%和2.69%,容量估计值对参考值最大误差仅为0.00772Ah ;实验结果表明:所提出的多时间尺度DEKF 算法,具有更好的鲁棒性和SOC 估算精度并能实时反应SOH 变化趋势㊂关键词:多时间尺度;二阶等效电路;DEKF ;SOC ;SOH中图分类号:TM912㊀㊀文献标识码:A ㊀㊀doi:10.16055/j.issn.1672-058X.2023.0005.007㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-03-05㊀修回日期:2022-05-18㊀文章编号:1672-058X(2023)05-0048-07基金项目:安徽省高校自然科学基金资助项目(KJ2019A0106).作者简介:姚昌兴(1998 ),男,安徽滁州人,硕士,从事电动汽车锂电池荷电状态与健康状态研究.引用格式:姚昌兴,李昕,邢丽坤.基于多时间尺度锂电池在线参数辨识及SOC 和SOH 估计[J].重庆工商大学学报(自然科学版),2023,40(5):48 54.YAO Changxing LI Xing XING Likun.On-line parameter identification and SOC and SOH estimation of lithium battery based onmulti-time scale J .Journal of Chongqing Technology and Business University Natural Science Edition 2023 40 5 48 54.On-line Parameter Identification and SOC and SOH Estimation of Lithium Battery Based on Multi-time Scale YAO Changxing LI Xing XING LikunSchool of Electrical and Information Engineering Anhui University of Science and Technology Anhui Huainan 232001 ChinaAbstract The state of charge SOC and state of health SOH of a battery are important indicators of battery endurance and lifetime.In order to solve the problem of time-varying battery parameters improve the accuracy of SOC estimation and reduce the hardware computation a joint multi-timescale online parameter identification algorithm with a double-extended Kalman filter was proposed.The multi-timescale DEKF algorithm based on the second-order RC equivalent circuit model was used for the online parameter identification and SOC estimation of the 18650ternary lithium battery with the slow-varying characteristics of the battery parameters and the fast-varying characteristics of the battery state.Through the test verification of the Federal Urban Driving Program FUDS the average absolute errors of the SOC estimation of the multi-time scale DEKF algorithm and the traditional offline identification EKF algorithm were 0.97%and 2.46% respectively the rms errors were 1.19%and 2.69% and the maximum error of the capacity estimation to the reference value was only 0.00772Ah.The experimental results show that the proposed time-scale DEKF algorithm has better robustness and SOC estimation accuracy and can respond to the SOH variation trend in real time.Keywords multi-time scales second-order equivalent circuit DEKF SOC SOH1㊀引㊀言在新能源电动汽车蓬勃发展的今天,新能源汽车正在逐渐取代传统燃油车㊂锂离子电池作为新能源汽车的动力电池,具有能量密度高㊁循环寿命长和环保等第5期姚昌兴,等:基于多时间尺度锂电池在线参数辨识及SOC和SOH估计特点,得到了广泛的应用㊂电池的荷电状态和健康状态SOH是衡量电池续航和寿命的重要指标;R SOC表示当前储存电量占可用容量的百分比;R SOH(State of Health)表征电池当前性能指标,表示与新电池对比,电池当前性能所能达到的水平,即电池当前性能与正常设计的偏离程度,一般用容量或者内阻的变化表示㊂对它们实时准确进行预测是优化锂电池充放电控制和电动汽车电池系统优化管理的重要环节㊂目前最为常见的SOC估算方法有开路电压法㊁安时积分法㊁神经网络法㊁卡尔曼滤波算法等㊂开路电压法[1]依赖于OCV-SOC曲线,需要将电池静置足够长时间以得到准确的开路电压值,不适用电池SOC在线估计㊂安时积分法[2]依赖于精确的初始值,但是并不能准确得到电流值,在积分过程中会累积难以消除的误差㊂神经网络法[3]具有较好的学习能力,能更准确地估算出电池SOC,但是神经网络法需要大量的数据集支撑,而且不同方法㊁不同变量㊁不同样本都容易导致最终结果出现比较大的偏差㊂卡尔曼滤波及其相关算法[4-6]解决了非线性和噪声处理问题,其中比较典型的就是扩展卡尔曼滤波(EKF)㊁无迹卡尔曼滤波(UKF)㊁自适应扩展卡尔曼滤波(AEKF)㊁自适应无迹卡尔曼滤波(AUKF)等算法,用其估计电池SOC,有着良好的预测结果㊂单个EKF算法[7]估计SOC方法的共同缺点是电池模型参数是用离线数据识别的,模型参数时变性被忽略㊂为了克服这一缺点,文献[8]提出了具有最优遗忘因子的递归最小二乘法进行在线电池参数辨识和SOC估计㊂然而,模型参数和SOC估计是在同一时间尺度下进行的,实际上在充放电过程中SOC是一个快速变化的量,电池参数是一个缓慢的变化量,同一时间尺度进行参数辨识和SOC估计会加大处理器的运算量㊂因此,很多文献开始提出不同时间尺度下电池参数和SOC估算的新方法:文献[9]提出一种基于多时间尺度的EKF-UKF参数辨识和SOC联合估算方法,实现了在宏观尺度下辨识电池参数,在微观尺度估算电池SOC,但该算法无法同时估计电池容量和模型参数㊂准确的容量估计对电池SOC估计来说是必不可少的,也是衡量电池健康状态(SOH)的重要指标;文献[10]提出了基于二阶RC等效电路模型的双卡尔曼滤波器联合估计电池SOC和SOH,虽然实现了电池SOC和容量的同时在线估计,但他们使用的仍然是离线辨识数据,没有考虑模型参数的时变性㊂上述方法均未能全面考虑电池模型参数的时变性和容量变化对电池状态估计造成的影响及处理器运算量等问题㊂为解决电池参数时变性问题,提高SOC估算精度,减少硬件计算量,针对上述方法对电池SOC估算的优缺点,以18650三元锂电池为研究对象,采用基于二阶RC等效电路模型的多时间尺度DEKF算法在线对电池的状态参数和SOC进行估算,对电池的容量状态进行跟踪㊂使用FUDS工况验证多时间尺度DEKF对电池状态参数和SOC的估算情况,验证了方法的可靠性㊂2㊀电池建模与参数辨识2.1㊀建立电池模型为准确估算电池的状态参数,一个合理准确的电池模型就显得极为重要㊂主流电池模型主要分为电化学模型㊁等效电路模型㊁神经网络模型等㊂其中电化学模型较为复杂,参数繁多,求解困难,难以在线直接应用;神经网络模型需要大量数据集用于模拟训练,耗时长㊂本文选取二阶RC等效电路模型,更加符合电池内部复杂的参数和化学变化,模型精度高,运算量小,适用于在线应用,如图1所示㊂R1R2R0U1U2UUo c vC1C2图1㊀二阶RC等效电路模型Fig.1㊀Second-order RC equivalent circuit model如图1所示:其中U ocv和U0分别是开路电压和端电压;R0是欧姆内阻;R1和C1表示电化学极化电阻和电容,具有较小的时间常数,模拟了电压急速变化的过程;R2和C2分别是浓度极化电阻和电容,具有较大的时间常数,模拟了电池使用过程中电压变化过程中逐渐稳定的过程;I为工作电流㊂根据等效电路模型建立模型表达式,如式(1)所示:U㊃1=-1R1C1U1+1C1IU㊃2=-1R2C2U2+1C2IU0=U ocv-IR0-U1-U2ìîíïïïïïï(1)2.2㊀实验确定OCV-SOC曲线和初始值本文以额定容量为2.2Ah的单体三元锂离子电池18650为研究对象,标称电压为3.7V,电压范围为2.5 V~4.2V㊂在恒温25ħ的保温箱内进行混合功率脉冲特性(HPPC)测试㊂开路电压可被认为是电池静置充分长时间以后的开路电压㊂根据HPPC测试实验可得94重庆工商大学学报(自然科学版)第40卷到OCV -SOC 对应的函数对应关系,如图2所示㊂拟合关系式如式(2)所示:U ocv =-20.7083R SOC 6+85.0152R SOC 5-133.5886R SOC 4+101.2818R SOC 3-37.8526R SOC 2+7.0109R SOC +3.0755(2)0.00.20.40.60.81.04.24.03.83.63.4开路电压U o c v/V R S O CO C V S O C拟合曲线图2㊀OCV -SOC 关系曲线Fig.2㊀OCV -SOC relationship curve根据混合功率脉冲特性(HPPC)测试,离线辨识参数作为在线参数辨识的初始值,后以实际工况为基础,利用算法实时在线辨识参数,参数初始值如表1所示:表1㊀模型参数初始值Table 1㊀Initial values of model parametersR 0/ΩR 1/ΩR 2/ΩC 1/FC 2/F0.03850.0080.049227.41027.82.3㊀联邦城市驾驶计划(FUDS )测试FUDS 是用于城市驾驶的汽车行业标准车辆时间速度曲线,多年来一直用于电动汽车性能测试㊂图3显示了FUDS 工况下电流和电压曲线㊂图4是在FUDS 工况下基于安时积分法100%到10%的SOC㊂24681012210-1-2-3-4电流/A t /s电流电压4.54.03.53.0电压/V103图3㊀FUDS 工况下电流和电压波形Fig.3㊀Current and voltage waveforms under FUDS conditions246810121.00.80.60.40.20.0R S O Ct /sS O C 变化曲线103图4㊀FUDS 工况下SOC 变化曲线Fig.4㊀SOC change curve under FUDS condition3㊀多时间尺度DEKF 算法3.1㊀电池模型状态方程电池SOC 表达式如式(3)所示:R SOC =R SOC,0-ηQ nʏt t 0I d τ(3)式(3)中,R SOC,0是初始值,Q n 是电池额定容量,η是电池库伦效率㊂将式(1)和式(3)联立离散化可得电池模型的状态方程和观测方程如式(4)㊁式(5)所示:R SOC,k +1U 1,k +1U 2,k +1éëêêêêùûúúúú=1000e -T τ1000e -T τ2éëêêêêêùûúúúúúR SOC,k U 1,k U 2,k éëêêêêùûúúúú+-ηT Q n R 11-e -kT τ1()R 21-e -kTτ2()éëêêêêêêêùûúúúúúúú㊃I k (4)U k =U ocv R SOC,k ()-U 1,k -U 2,k -R 0I k(5)式(4)中,T 表示系统采样时间,τ为时间常数,其中τ1=R 1C 1,τ2=R 2C 2,U 1,k 和U 2,k 代表极化电压㊂3.2㊀系统描述对于电池参数的慢变特性和电池状态的快变特性,采用多时间尺度方法构建离散状态空间表达式,对系统参数和状态进行宏观尺度和微观尺度预测,结合锂电池参数变化,得到系统的状态空间表达式如式(6)所示:x k ,l +1=f x k ,l ,θk ,u k ,l ()+ωk ,l ,θk +1=θk +ωθky k ,l =g x k ,l ,θk ,u k ,l ()+v k ,l ,y k =g x k ,θk ,u k ()+v θk{(6)其中,x k ,l +1是t k 时刻的系统状态矩阵,l =t k ,0+l ˑT (1ɤl ɤL ),其中T 是采样间隔,k 和l 分别是衡量宏观尺度和微观尺度的两个重要指标;参数状态变量θ=5第5期姚昌兴,等:基于多时间尺度锂电池在线参数辨识及SOC 和SOH 估计R 0,R p 1,C p 1,R p 2,C p 2,Q n []T ;ωk ,l 和ωθk 分别是状态和参数的过程噪声矩阵;v k ,l 和v θk 是状态和参数的测量噪声㊂Q k =E w k w T k []是状态过程噪声误差协方差,R k=E v k v T k []测量噪声误差协方差,Q θk =E ωθk ωθk ()T[]和R θk =E v θk v θk ()T[]是参数过程噪声误差协方差及其参数测量噪声协方差误差㊂3.3㊀多时间尺度DEKF 算法步骤步骤1㊀初始化状态变量x 0,0㊁参数状态变量θ0㊁状态变量误差协方差P x 0,0㊁参数变量误差协方差P θ0,表达式如式(7)所示:x 0,0=E x 0,0(),θ0=E θ0()P x 0,0=E x 0,0-x ^0,0()x 0,0-x ^0,0()T[]P θ0=E θ0-θ^0()θ0-θ^0()T []ìîíïïïï(7)步骤2㊀在宏观尺度上,参数估计的扩展卡尔曼滤波算法执行时间更新并计算先验参数估计θ-k 和误差协方差P -θk ,如式(8)所示:θ-k =θ^k -1P -θk =P -θk -1+Qθk{(8)步骤3㊀划分出宏观尺度L 和微观尺度l ,对于l ɪ{1, ,L },计算每个微尺度的先验状态变量估计值x -k ,l 及协方差误差P x-k -1,l,如式(9)所示:x -k -1,l =f x ^k -1,l -1,θ-k ,u k ,l -1()P x -k -1,l=A k -1,l -1P x ^k ,l -1A T k -1,l -1+Q k{(9)步骤4㊀在每个微观尺度上,状态估计卡尔曼滤波算法执行测量更新,随后是状态估计卡尔曼滤波算法的时间更新,其中状态扩展卡尔曼增益K SOC k -1,l ,后验状态估计值x ^k -1,l 及其误差协方差P x ^k -1,l,如式(10)所示:K SOC k -1,l =P x -k -1,l C T k -1,l C k -1,l P x -k -1,lC T k -1,l +R k ()-1x ^k -1,l =x -k -1,l +K SOC k -1,ly k -1,l -g x -k -1,l ,θk -1,u k -1,l ()[]P x ^k -1,l =I -K SOC k -1,l C k -1,l ()P x-k -1,lìîíïïïï(10)步骤5㊀在后验状态估计之后,比较微观尺度l 和宏观尺度L 的大小㊂如果l 没有达到水平L ,则状态估计x ^k -1,l 将传输到第三步作为时间的初始值,然后再次估计状态,对于时间序列计算l =1:L (l ңL ),则先验状态估计x -k -1,L 及其协方差误差P x -k -1,L,后验状态估计x ^k -1,L 及其误差协方差P x ^k -1,L,准备好进入宏观尺度更新,如式(11)所示:x -k -1,L =f x ^k -1,L -1,θ-k ,u k -1,L -1()P x -k -1,L =A k -1,L -1P x ^k -1,L -1A T k -1,L -1+Q k K SOC k -1,L =P x -k -1,l C k -1,L ()T C k -1,L P x -k -1,LC k -1,L ()T +R k []x ^k -1,L =x -k -1,L +K SOC k -1,L y k ,L -g x -k -1,L ,θ-k ,u k -1,L ()[]P x ^k -1,L=I -K SOC k -1,L C k -1,L ()P x-k -1,Lìîíïïïïïïïï(11)步骤6㊀时间尺度转换,更新所有微观尺度数据,时间t k -1,L 的估计值已准备好更新为t k ,0的值,用于参数估计和宏观状态估计,如式(12)所示:x ^k ,0=x ^k -1,L ,P x ^k ,0=P x ^k -1,Ly k .0=y k -1,L ,u k ,0=u k -1,L{(12)步骤7㊀宏观尺度的扩展卡尔曼滤波算法已经准备好执行测量更新,其中参数扩展卡尔曼增益K θk ㊁后验参数估计θ^k 和协方差P θ^k,如式(13)所示:K θk =P θ-k C θk ()T C θk P θ-kC θk ()T +R θk []-1θ^k =θ-k +K θky k ,0-g x ^k .0,θ-k ,u k ,0()[]P θ^k =I -K θk C θk ()P θ-kìîíïïïï(13)其中,θ0是初始系统参数,θ^0是它的猜测值;x 0,0是初始系统状态,并且x ^0,0是它的猜测值㊂两个扩展卡尔曼滤波在不同时间尺度运行,其中A k -1,l -1,C k -1,l ,C θk 如式(14)所示:A k -1,l -1=∂f x ,θ-k ,u k -1,l -1()∂x∣x =x ^k -1,l -1C k -1,l =∂g x ,θ-k ,u k -1,l ()∂x ∣x =x -k -1,l C θk=∂g x ^k .0,θ,u k ,0()d θ∣θ=θ-k ìîíïïïïïïïï(14)结合上述内容,为了同时实现电池参数和SOC 同时在线估计,设计了两个扩展卡尔曼滤波算法,其中一个EKF 用于电池参数在线辨识,另一个EKF 用于电池状态实时估计㊂首先,初始化参数变量和状态变量,状态估计EKF 在微观尺度下估计电池SOC,当时间进行到宏观尺度时,时间尺度变换,时间t k -1,L 的估计值已准备好更新为t k ,0的值,用于参数估计和宏观状态估计㊂更新后的参数用于微观尺度状态估计EKF 估计电池SOC,两个卡尔曼滤波算法在不同时间尺度运行,可得到不同时刻电池参数和SOC 估计值㊂多时间尺度DEKF 算法结构如图5所示:15重庆工商大学学报(自然科学版)第40卷参数辨识卡尔曼状态估计卡尔曼输入U 01,1初始化θ0,P θk 初始化x 0,0,P x 0,0时间尺度更新计算θk ,P θkk -1,l划分出宏观L 和微观尺度I ,计算微观尺度下x k ,l ,P x k +1k -1,l ,计算K S O C^x k -1,l ,^x k -1,lP l +1l +L ?否是K +1参数输入,更新电池模型和状态空间方程计算K θk,θk ^,P k θ^测量方程更新,计算I =L 条件下P x k -1,L-x k -1,L K S O C k -1,L x k -1,L ^P x k -1,L ^时间尺度变换用于参数和宏观状态估计x k ,0^,P x k ,0^,y u ,,,,k,0k ,0,图5㊀多时间尺度DEKF 算法结构图Fig.5㊀Structure diagram of multi -time scale DEKF algorithm4㊀实验验证与分析为验证多时间尺度DEKF 的估算精度,采用联邦城市驾驶计划(FUDS)测试数据,通过Matlab 编写多时间尺度DEKF 算法运行程序,对比在不同宏观和微观尺度下的SOC 估算误差,得出在宏观尺度为60s㊁微观尺度为1s 时有比较好的SOC 估算结果,实验误差在合理范围之内㊂4.1㊀在线参数辨识结果分析根据混合功率脉冲特性(HPPC)测试,离线辨识参数作为在线参数辨识的初始值,设置SOC 初始值为0.8,通过多时间尺度DEKF 算法,得到对R 0,R 1,R 2,C 1,C 2的辨识结果如图6㊁图7所示:0.0450.0440.0430.0420.0410.0400.0390.0380.0370.0360.03550100150200R 0/Ω次数(a )R 00.0240.0220.0180.0160.0140.0120.0100.00850100150200R 1/Ω次数(b )R 10.0500.0480.0460.0440.0420.0380.0360.0340.0320.03050100150200R 2/Ω次数(c )R 2图6㊀R 0,R 1,R 2参数辨识结果Fig.6㊀Identification results of parameters R 0,R 1and R 230025020015010050100150200C 1/F 次数(a )C 11800160014001200100050100150200C 2/F 次数(b )C 2图7㊀C 1,C 2参数辨识结果Fig.7㊀Identification results of parameters C 1and C 2由以上参数辨识结果可以得知:在参数辨识30次之前,各参数有比较剧烈的波动,这主要因为没有选取一个恰当的初值,之后模型各参数趋于稳定㊂模型参数本就不是一个定值,会随着温度㊁循环次数等条件的改变而发生变化㊂整个过程中,参数辨识结果R 0逐步缓慢上升,R 1先缓慢减小后缓慢增大,R 2先缓慢增大后缓慢减小,整个放电过程的阻值是增加的㊂C 1先趋于平稳后快速减小再趋于平稳,C 2先快速增加后趋于平稳,但模型时间常数τ1和τ2波动不大,且τ2始终大于τ1,符合锂电池实际放电特性㊂4.2㊀SOC 估计结果分析为验证电池SOC 在多时间尺度DEKF 算法下的精度,本文选取安时积分法作为真实SOC 参考值,FUDS25第5期姚昌兴,等:基于多时间尺度锂电池在线参数辨识及SOC 和SOH 估计工况电流电压值作为输入,采用离线参数辨识EKF 和多时间尺度在线参数辨识DEKF 滤波算法估算电池SOC,并与参考值作对比,得出估算结果及误差结果如图8㊁图9所示㊂1.00.80.60.40.20.02468101214R S O C安时积分法D E K F E K F1.00.90.8020*********t ?103/s图8㊀SOC 估算结果Fig.8㊀Estimation results of SOC0.200.150.100.050.00-0.052468101214误差D E K FE KF t ?103/s图9㊀SOC 估算误差Fig.9㊀Estimation errors of SOC由SOC 估算结果和SOC 估算误差可以得知:多时间尺度的DEKF 算法相对于EKF 算法对SOC 的估算结果更接近参考值,具有较好的鲁棒性,其平均绝对误差仅为0.97%,而EKF 算法则为2.46%㊂随着放电的不断进行,多时间尺度的DEKF 算法可以实时更新电池参数,其估算精度更高,具有极强的稳定性,其均方根误差为1.19%,而EKF 电池参数是定值,会随着放电时间的累积,误差不断增大,其均方根误差为2.69%㊂通过上述分析,可知多时间尺度的DEKF 算法具有比较好的估算精度和鲁棒性㊂4.3㊀SOH 估计结果分析本文假设容量的更新随着模型参数一起更新,但实际容量变化十分缓慢,正常情况下可以几天校准一次,容量辨识结果如图10所示㊂2.0502.0452.0402.0352.0302.0252.02050100150200R S O H/A h 参考值估计值次数图10㊀容量估算结果Fig.10㊀Capacity estimation results从图10可以看出:估计值对参考值有着良好的跟踪能力,最大误差仅为0.00772Ah㊂5㊀结㊀论本文以二阶RC 等效电路模型为基础,建立多时间尺度DEKF 滤波算法,该算法可以同时在线估计电池模型参数㊁容量和SOC,并在FUDS 工况下对该算法与传统离线参数辨识EKF 算法进行比较,体现了该算法在SOC 估计精度方面的优势㊂平均绝对误差和均方根误差都明显降低,解决了电池参数时变所造成的SOC 估算精度差的问题,减小了硬件计算量,提高了算法的精确度和鲁棒性,验证了该算法对电池容量的跟踪能力,该算法能够较好跟踪容量在该实验中的变化情况㊂本文虽然对电池SOC 和容量都进行了预测,但鉴于研究是基于恒温实验条件下进行,在电池使用过程中,温度对电池状态参数和SOC 影响较大,后续将对温度对电池参数和SOC 的影响做进一步研究㊂参考文献 References1 ㊀陈东 高文根 李鹏飞 等.磷酸铁锂电池SOC -OCV 曲线特性研究 J .黑龙江工业学院学报 综合版 2021 21 12 89 94.CHEN Dong GAO Wen-gen LI Peng-fei et al.Study onSOC-OCV curve characteristics of lithium iron phosphatebattery J .Journal of Heilongjiang Institute of TechnologyComprehensive Edition 2021 21 12 89 94.2 ㊀王文亮 何锋 郑永樑 等.基于RLS-EKF 联合算法的锂电池SOC 估算 J .电源技术 2020 44 10 1498 1501 1505.WANG Wen-liang HE Feng ZHENG Yong-liang et al.SOC estimation of lithium battery based on RLS-EKF joint algorithm J .Power Technology 2020 44 10 149835重庆工商大学学报(自然科学版)第40卷1501 1505.3 ㊀SHEN Y.Adaptive online state-of-charge determination basedon neuro-controller and neural network J .Energy Conversion &Management 2010 51 5 1093 1098.4 ㊀刘浩.基于EKF的电动汽车用锂离子电池SOC估算方法研究D .北京北京交通大学2010.LIU Hao.Research on SOC estimation method of lithium-ion battery for electric vehicle based on EKF D .Beijing Beijing Jiaotong University 2010.5 ㊀田茂飞安治国陈星等.基于在线参数辨识和AEKF的锂电池SOC估计J .储能科学与技术2019 84745 750.TIAN Mao-fei AN Zhi-guo CHEN Xing et al.Lithium battery SOC estimation based on online parameter identification and AEKF J .Energy Storage Science and Technology 2019 8 4 745 750.6 ㊀王震坡薛雪王亚超.基于自适应无迹卡尔曼滤波的分布式驱动电动汽车车辆状态参数估计J .北京理工大学学报2018 38 7 698 702.WANG Zhen-Po XUE Xue WANG Ya-chao.Estimation of state parameters of distributed drive electric vehicles based on adaptive unscented Kalman filtering J .Journal of Beijing Institute of Technology 2018 38 7 698 702.7 ㊀孙立珍赵乐乐刘广忱.基于近似二阶EKF的非线性滤波仿真J .计算机与数字工程2022 50 2 289 293.SUN Li-zhen ZHAO Le-le LIU Guang-chen.Simulation of nonlinear filtering based on approximate second-order EKF J .Computer and Digital Engineering 2022 502289 293.8 ㊀孙金磊邹鑫顾浩天等.基于FFRLS-EKF联合算法的锂离子电池荷电状态估计方法J .汽车工程2022 444505 513.SUN Jin-lei ZOU Xin GU Hao-tian et al.Estimation method of state of charge of lithium-ion battery based on FFRLS-EKF joint algorithm J .Automotive Engineering 2022 44 4 505 513.9 ㊀邢丽坤郭敏张梦龙等.多时间尺度下锂电池在线参数辨识及SOC估计J .安徽理工大学学报自然科学版2021 41 5 1 7.XING Li-kun GUO Min ZHANG Meng-long et al.On-line parameter identification and SOC estimation of lithium batteries under multiple time scales J .Journal of Anhui University of Science and Technology Natural Science Edition 2021 41 5 1 7.10 唐传雨韩华春史明明等.基于DEKF的储能电池系统SOC估计方法研究J .电力工程技术2021 4037 14.TANG Chuan-yu HAN Hua-chun SHI Ming-ming et al.Research on SOC estimation method of energy storage battery system based on DEKF J .Electric Power Engineering Technology 2021 40 3 7 14.11 杨世春华旸顾启蒙等.锂离子电池SOC及容量的多尺度联合估计J .北京航空航天大学学报2020 4681444 1452.YANG Shi-chun HUA Yang GU Qi-meng et al.Multi-scale joint estimation of SOC and capacity of lithium-ion batteries J .Journal of Beijing University of Aeronautics and Astronautics 2020 46 8 1444 1452.12 XIONG R SUN F CHEN Z et al.A data-driven multi-scaleextended Kalman filtering based parameter and state estimation approach of lithium-ion olymer battery in electric vehicles J .Applied Energy 2014 113 463 476.13 高晋艾田付徐新法等.基于UKF的磷酸铁锂电池电荷状态估算策略J .电子测量技术2018 41 3 12 16.GAO Jin AI Tianfu XU Xin-fa et al.State-of-charge estimation strategy for lithium-iron phosphate battery based on UKF J .Electronic Measurement Technology 2018 41312 16.14 袁翔周湘蒋鹏.电动汽车用锂电池模型参数辨识方法研究J .公路与汽运2015 4 13 16.YUAN Xiang ZHOU Xiang JIANG Peng.Research on parameter identification method of lithium battery model for electric vehicles J .Highway and Automobile Transportation 2015 4 13 16.15 印学浩宋宇晨刘旺等.基于多时间尺度的锂离子电池状态联合估计J .仪器仪表学报2018 39 8 118 126.YIN Xue-hao SONG Yu-chen LIU Wang et al.Joint estimation of lithium-ion battery state based on multiple time scales J .Chinese Journal of Instrumentation 2018 398118 126.16 CHAO H YOUN B D CHUNG J.A multiscale framework withextended Kalman filter for lithium-ion battery SOC and capacity estimation J .Applied Energy 2012 92 694 704.17 何锋王文亮蒋雪生等.双扩展卡尔曼滤波法估计锂电池组SOC与SOH J .农业装备与车辆工程2021 59737 40 61.HE Feng WANG Wen-liang JIANG Xue-sheng et al.Estimation of SOC and SOH of lithium battery pack by double extended Kalman filter method J .Agricultural Equipment and Vehicle Engineering 2021 59 7 37 40 61.责任编辑:李翠薇45。
锂电池动态系统Thevenin模型研究
作者简介:魏增福(1978-),男,山东人,高级工程师,研究方向:电池检测技术,化学储能技术; 董 波(1990-),女,河北人,硕士研究生,研究方向:电池建模,电池管理;刘新天(1981-),男,安徽人,工学博士,副研究员,研究方向:电池建模,电池管理,本文联系人。
锂电池动态系统Thevenin 模型研究魏增福1,董 波2,刘新天2,何 耀2,曾国建2[1.广东电网公司电力科学研究院,广东 广州 510080;2.合肥工业大学新能源汽车工程研究院,安徽 合肥 230009] 摘要:建立高精度的电池模型对于电动汽车动力锂电池的应用研究有重大意义。
锂电池在使用过程中,其系统参数会跟随外界环境及荷电状态变化而改变,选用固定参数的电池模型会导致模型精度差。
针对此问题,提出一种动态系统Thevenin 模型。
结合影响锂电池特性的荷电状态和环境温度因素,将经典Thevenin 模型中的欧姆内阻、极化内阻、极化电容等固定参数,在动态系统Thevenin 模型中描述为随荷电状态与温度动态变化的变量。
最后选取单体锂电池为实验对象,采用HPPC 实验辨识模型参数,对经典模型与动态系统模型分别进行仿真分析,结果表明,动态系统Thevenin 模型能更准确描述锂电池性能。
关键词:电动汽车;锂电池;Thevenin 模型;荷电状态中图分类号:TM912.9 文献标识码:A 文章编号:Study on dynamical system Thevenin model of Li-ion batteryWEI Zengfu 1, DONG Bo 2, LIU Xintian 2, HE Yao 2, ZENG Guojian 2[1.Guangdong Power Gird Corporation Electric Power Research Institution, Guangdong Guangzhou 510080; 2. Hefei University of Technology, New Energy Automobile Engineering Research Institute, Anhui Hefei 230009]Abstract: Establishing high-precision battery model is of great significance for the application of electric vehicles power Li-ion battery. The system parameters of the Li-ion battery will change follow the changes of external environment state and the State-of-Charge, fixed parameters battery model will lead to poor accuracy. For this problem, a dynamic system Thevenin model is proposed. Fixed parameters in the classical Thevenin model such as ohm resistance, polarization resistance and polarization capacity etc, will be described as variables change with the State-of-Charge and temperature dynamically, combining with the State-of-Charge and temperature which affect lithium characteristics. Finally, do simulated analysis for the classical model and dynamic system model, using HPPC experimental identify the model parameters with Li-ion battery monomer selected as experimental subjects. The results show that the dynamic system, Thevenin model can more accurately describe the performance of lithium batteries. Keywords: Electrical Vehicle; Li-ion battery; Thevenin model; State-of-Charge动力电池作为电动汽车动力系统的关键部件,其性能影响到整车性能。