机械原理第二章
《机械原理》课件第二章平面机构的结构分

用规定的符号和线条代表构件和运动 副,按比例绘制出机构运动简图。
选择合适的投影面
一般选择机构的多数构件在同一平面 或相互平行的平面内运动的投影面作 为绘制运动简图的投影面。
自由度概念及计算公式
自由度概念
机构具有确定运动的独立参数数目称为机构的自由度。
自由度计算公式
F = 3n - 2PL - PH,其中F为机构自由度,n为活动构件数,PL为 低副数,PH为高副数。
《机械原理》课件第二章平面机构 的结构分析
目 录
• 平面机构基本概念与分类 • 平面机构运动简图及自由度计算 • 平面连杆机构结构分析与设计 • 凸轮机构结构分析与设计 • 齿轮传动系统结构分析与设计 • 其他常见平面机构介绍
01 平面机构基本概念与分类
平面机构定义及特点
定义
平面机构是指所有构件都在相互平行的平面内运动的机构,也称为平面连杆机 构。
采用多个连杆机构和关节组合而成,可实现 复杂的空间运动和操作任务。具有结构紧凑 、灵活性强等特点。
04 凸轮机构结构分析与设计
凸轮机构类型及特点
移动凸轮
凸轮相对机架作直线移动,适用于需要直 线往复运动的场合,如机床的进给机构等。
盘形凸轮
凸轮为绕固定轴线转动且有变化直 径的盘形构件,具有结构简单、紧 凑的特点,广泛应用于各种自动化
尺度和相对位置。具有直观、简便等优点,但精度较低。
02
解析法
通过建立机构的数学模型,利用数学方法求解机构的未知尺度和运动参
数。具有精度高、适用范围广等优点,但计算较复杂。
03
优化设计法
以机构的某项或多项性能指标为优化目标,通过计算机辅助设计软件进
行尺度综合和优化设计。可得到性能更优的机构方案,但需要较高的计
西工大教材-机械原理各章习题及答案
电动机所需的功率为
p = ρ • v /η = 5500 ×1.2 ×10−3 / 0.822 = 8.029(KW )
5-8 在图示斜面机构中,设已知摩擦面间的摩擦系数 f=0.2。求在 G 力作用下(反行程),此斜面 机构的临界自锁条件和在此条件下正行程(在 F 力作用下)的效率。 解 1)反行程的自锁条件 在外行程(图 a),根据滑块的平衡条件:
解 1 ) 取 比 例 尺 μ 1 = 1mm/mm 绘 制 机 构 运 动 简 图 ( 图 b )
(a)
2 )计算该机构的自由度
n=7
pι=9
ph=2(算齿轮副,因为凸轮与齿轮为一体) p’=
F’= F=3n-2pe-ph
=3x7-2x8-2 =1
G7
D 64 C
EF
3
9
B
2
8
A
ω1
b)
2-6 试计算如图所示各机构的自由度。图 a、d 为齿轮一连杆组合机构;图 b 为凸轮一连杆组合 机构(图中在 D 处为铰连在一起的两个滑块);图 c 为一精压机机构。并问在图 d 所示机构中, 齿轮 3 与 5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目是否相同?为什么?
C3 重合点继续求解。
解 1)速度分析(图 b)取重合点 B2 与 B3,有
方向 大小 ?
v vv vB3 = vB2 + vB3B2 ⊥ BD ⊥ AB // CD ω1lAB ?
D
C
3 d3
ω3
4
ω3 90°
2
B(B1、B2、B3)
ω1
A1 ϕ = 90°
机械原理第2、3、4、6章课后答案西北工业大学(第七版)

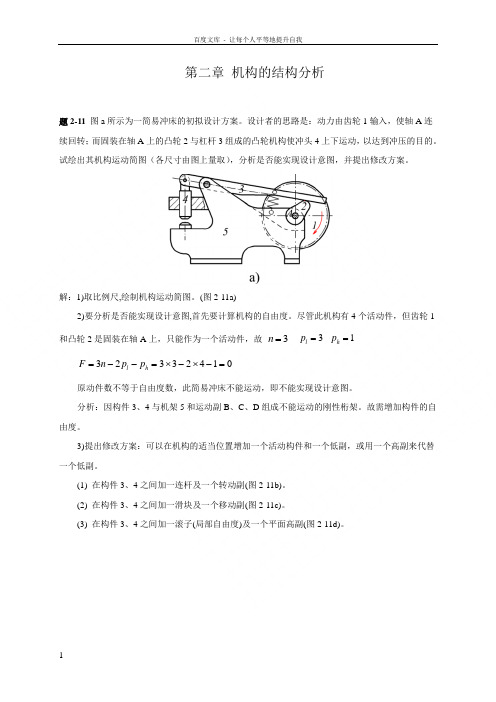
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)5364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
西北工业大学机械原理课后答案第2章(可编辑)

第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
题2-11讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成:此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
西北工业大学机械原理课后答案第2章
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
华东交通大学机械原理第二章
虚约束:杆8及转动副F、I引入1个虚 约束。
计算自由度前直接去除虚约束和局部 自由度:
n=6 pl=7 ph=3
F=3n-2pl-ph=1
n=6,pL=8,PH=1
§2-6
一、机构的组成原理
1. 杆组
机构的组成原理及结构分类
机构具有确定运动的条件: 自由度数=原动件数
机架和原动件与从动件组分开: 从动构件组自由度为零。
例2 铰链五杆机构 若给定机构一个独立运动, 若给定机构两个独立运动,
则机构的运动不确定; 则机构的运动完全确定。
机构的自由度 机构具有确定运动时所必须给定的独立运动 参数的数目,其数目用F表示。
结论 机构具有确定运动的条件是:机构的原动件数目应等
于机构的自由度数目F。
◆ 平面机构自由度的计算公式
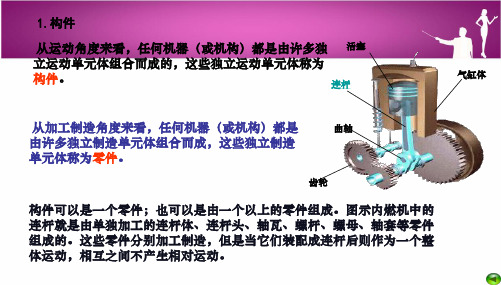
1.构件
从运动角度来看,任何机器(或机构)都是由许多独 活塞
立运动单元体组合而成的,这些独立运动单元体称为
构件。
连杆
气缸体
从加工制造角度来看,任何机器(或机构)都是
曲轴
由许多独立制造单元体组合而成,这些独立制造
单元体称为零件。
齿轮
构件可以是一个零件;也可以是由一个以上的零件组成。图示内燃机中的 连杆就是由单独加工的连杆体、连杆头、轴瓦、螺杆、螺母、轴套等零件 组成的。这些零件分别加工制造,但是当它们装配成连杆后则作为一个整 体运动,相互之间不产生相对运动。
F 3n 2 pl ph 35 26 0 3
F 3n 2 pl ph
? 33 231
2
F 3n 2 pl ph 34 26 0 0
复合铰链 由m个构件组成的复合铰链,共有(m-1)个转动副。
机械原理 第二章-2相对运动图解、解析
1
3
aC1n c2 (c3) aC1t 4 D
A
4 P c1
一步减少未知数的个数。
n t k r aC2 aC3D aC3D aC1 aC2C1 aC2C1
2 3 l3
大小: 方向:
? 3l3
√ √
21vC 2C 1 ?
√ ∥AB
C→D ⊥CD
2) 取速度比例尺a , 作 加速度多边形。
P
c1
( 顺时针 )
2. 加速度分析:
1) 依据原理列矢量方程式 分析:
aC2 = aC1 + aC2C1
B
2 C akC2C1
当牵连点系(动参照系)为 转动时,存在科氏加速度。 3
D 4
ω1
1
1
c2 (c3)
r k aC2C1 aC2C1 aC2C1
科氏加速度
A
4 P c1
k r a 2 v
√
√
22lBC
C→B
?
⊥BC
b) 根据矢量方程式,取加速度比例尺
a
实际加速度
c´ 图示尺寸
m/
s2
p
mm
, 作矢量多边形。
c e b
p
极点
n
b
由加速度多边形得:
aC a pc m / s2
t 2 aCB l BC a nc l BC
同样,如果还需求出该构件上E 点的加速度 aE,则
pe 则代表 aE
由加速度多边形得:
p c´ n
aE pea
△b’c’e’ ~ △BCE , 叫 做
△BCE 的加速度影像,字 母的顺序方向一致。
机械原理第二章23
平面机构中高副低代的方法
r1
O1
C
1 1
A
3
r2 O2
2 B
O1 1
A
4
O2
2
3
B
高副机构可以用右图所示的铰链四杆机构A0lO2B来代替。 代替后机构的运动并不发生任何改变,因此能满足高副低代 的第二个条件。由于高副具有一个约束,而构件4及转动副 Ol、O2也具有一个约束,所以这种代替不会改变机构的自 由度,即满足高副低代的第一个条件。
B 4
F
(f)
PFfL
Ⅳ级杆组(Grade Ⅳ Assur groups)
Ⅳ级杆组:最高封闭形为有四个运动副的四边 形,构成的基本杆组称为IV级杆组。 。
高于Ⅲ级杆组的基本杆组在实际机构中应用很 少。
PFfL
2. 平面机构的结构分析
平面机构结构分析的目的
通过分析机构的组成来确定机构的级别。
平面机构的级别取决于该机构能够分解出的基本杆 组的最高级别。
分析:当机构运动时,距离AO1,O1O2=r1+r2,BO2
均保持不变,高副C被构件4和位于O1,O2的两个
低副来代替。
PFfL
具有任意曲线轮廓高副机构
C
2
1 O1 O2
n O1
n
A
B
A
3
O2 B
分析:机构运动时,随着接触点的改变,O1,O2相对于 构件1和2的位置也发生变化。O1,O2间的距离也发生变 化。因此,对于一般的高副机构,在不同位置有不同的瞬 时代替机构。
1 A
PRP 3 A4
12
机械原理:第二章机构的结构分析
斜齿轮机构
两个齿轮的齿廓为斜线,实现直线的 运动传递,同时具有较好的承载能力 和传动平稳性。
02
CHAPTER
机构的运动分析
机构运动简图
总结词
机构运动简图是表示机构运动关系的图形,通过图形化方式展示机构的组成和运 动传递路径。
详细描述
机构运动简图是一种抽象的图形表示,它忽略了机构的实际尺寸和形状,只关注 机构中各构件之间的相对运动关系。通过绘制机构运动简图,可以清晰地了解机 构的组成、运动传递路径以及各构件之间的相对位置和运动方向。
常见的受力分析方法
详细描述:常见的受力分析方法包括解析法、图解法和 有限元法等,每种方法都有其适用范围和优缺点,应根 据具体情况选择合适的方法。
机构的平衡分析
总结词
理解机构平衡的概念是进行平衡 分析的前提。
详细描述
机构平衡是指机构在静止或匀速 运动状态下,各作用力相互抵消 ,机构不会发生运动状态的改变 。
轮系
定轴轮系
各齿轮的转动轴线固定,齿轮的 运动由一个主动轮通过各齿轮的
啮合传递到另一个从动轮。
行星轮系
其中一个齿轮的转动轴线绕着另 一固定轴线转动,行星轮既可绕 自身轴线自转,又可绕固定轴线
公转。
混合轮系
由定轴轮系和行星轮系组合而成, 既有定轴轮系的自转运动,又有
行星轮系的公转和自转运动。
凸轮机构
机构运动分析的方法
总结词
机构运动分析的方法主要包括解析法和图解法两种。
详细描述
解析法是通过建立数学模型,运用数学工具进行求解的方法。这种方法精度高,适用于对机构进行精确的运动学 和动力学分析。图解法是通过作图和测量来分析机构运动的方法,这种方法直观易懂,适用于初步了解机构的运 动关系。
机械原理(第二章自由度培训课件
2 齿轮比
不同大小齿轮之间的速度和力的比值。
3 设计与分析
理论计算齿轮参数、齿轮传动效率等。
齿轮齿形
齿形几何
齿轮齿形的几何形状和参数。
齿形接触
齿轮齿形接触的面积和位置。
齿形磨损
由于摩擦和磨损引起的齿形变化。
齿轮传动比的计算
1
应用Байду номын сангаас
2
用于调整驱动装置和被驱动装置之间的
速度比。
3
计算公式
根据齿轮数和齿轮直径计算传动比。
物体接触点的几何形状和边界
接触力
两个接触物体之间传递的力
接触表面
物体表面的材料和特性
齿轮与蜗轮传动
1
齿轮传动
通过齿轮将动力传递给另一个齿轮。
蜗轮传动
2
将动力传递给蜗轮以实现转速转向的改
变。
3
应用
齿轮传动广泛应用于各种机械系统中, 如汽车变速器、工厂机械等。
齿轮基础理论
1 齿轮类型
直齿轮、斜齿轮、渐开线齿轮等。
位移
物体的位置发生变化。
速度
描述物体在单位时间内位移的变 化。
加速度
描述速度在单位时间内的变化。
二次运动学
1 定义
描述物体的运动状态和变化规律,如速度和加速度的变化。
2 应用
用于分析和设计各种机械系统,如机械臂、转子等。
运动定理
1
牛顿第一定律
静止的物体保持静止,运动的物体保持
牛顿第二定律
2
匀速直线运动。
物体受力时,加速度与力的大小成正比,
与物体质量成反比。
3
牛顿第三定律
相互作用的两个物体之间的作用力大小 相等,方向相反。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A1 B 2 F vB3
3 α= 0° C γ= 90°
vF α
C
2 B
3 αF 1 vB3
A 1 BvB3 α
2F 3
A
C
F
n αv
2、最小传动角的确定
Vc F2
γ= δ
或γ = 180- δ
B
C
’’
F
γγbδ c
Cγ F1 C’
F vc
B
’’
a A
δδmax d B’
δmin D
γmin=[δmin ,180 -δmax]min δ= arccos{[b2+c2-d2-a2+2adcos]/2bc}.
曲柄摇杆机构
C
AD B
C
D
A
B
平行四边形机构
B
b
a
B’
A
d
C C’
c
D
反平行四边形机构 B
a A
A
2
C
3
C1
1
B
B1
D
4
d
D
b c
C
•
树立质量法制观念、提高全员质量意 识。20. 10.2420 .10.24Saturday , October 24, 2020
•
人生得意须尽欢,莫使金樽空对月。0 7:27:18 07:27:1 807:27 10/24/2 020 7:27:18 AM
阻力较小的空回行程中。
3 机构的死点位置
BF
A α
v
F Bα Av
C
F1 = Fcosα F2 = Fsinα
C
D
D
在不计构件的重力、惯性力和运动副中的摩擦阻力 的条件下,当机构处于传动角γ=0°(或α=90°)的位 置下,无论给机构主动件的驱动力或驱动力矩有多大, 均不能使机构运动,这个位置称为机构的死点位置。
Ci
如果把机构的第i B1 个位置ABiCiD看成一刚
1i Bi
体(即刚化),并绕点D 转过(-1i)角度(即反 A
1
转),使输出连架杆CiD
B’ 1i
与C1D重合,称之为“刚
i
化反转法”。
1i
1 D
A’
给定两连架杆上三对对应位置的设计问题
B2
B3
E1
E2
B1 1 2
E3
C1
1 2
3
3
A
D
A2’
2 封闭矢量四边形法
2 3
4 机架
绕其轴线回转360° 连架杆 者称为曲柄;仅能
绕其轴线往复摆动
者称为摇杆。
1)曲柄摇杆机构:两连架杆中,一个为曲柄, 而另一个为摇杆。 2)双曲柄机构 两连架杆均为曲柄。 3)双摇杆机构 两连架杆均为摇杆。
二 平面四杆机构的演变
1 转动副转化为移动副
C 2
B
1
A
3
3C
2
DB
1
A
D
B
题2-12
D
C1
F2
C2 B1 F1
A
C2’
lAB AB1 l D’ lBC B1C1 l
题2-8
A
B2 C1
E C2
B1
45º
k 1, 0
AB AC2 AC1 2
C1C2 2 AB
lBC B2C2 l lCD C2D2 l
双曲柄机构
E C B
AD
双摇杆机构
鹤式起重机
θ=180°(K-1)/(K+1) 连杆机构输出件具有急回特性的条件
1)原动件等角速整周转动; 2)输出件具有正、反行程的往复运动; 3)极位夹角θ>0。
B
A
B1
B2 C1
A
A
B1
θ
B2
B1 C
=
D
C
B C1
θ
B2
C2 C C2
三、平面机构的压力角 和传动角、死点 B
A
F2 C
γ
F
α
δ F1
vc
•
踏实肯干,努力奋斗。2020年10月24 日上午7 时27分 20.10.2 420.10. 24
•
追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2 020年1 0月24 日星期 六上午7 时27分 18秒07 :27:182 0.10.24
•
严格把控质量关,让生产更加有保障 。2020 年10月 上午7时 27分20 .10.240 7:27Oc tober 24, 2020
D F1 = Fcosα F2 = Fsinα
1、机构压力角:在不计摩擦力、惯性力和重 力的条件下,机构中驱使输出件运动的力的 方向线与输出件上受力点的速度方向间所夹 的锐角,称为机构压力角,通常用α表示。
传动角:压力角的余角。 通常用γ表示. B
A
F2 C
γ
F
δ
α
F1
vc
D
机构的传动角和压力角作出如下规定: γmin≥[γ ];[γ]= 3060°; αmax≤[α]。 [γ]、[α]分别为许用传动角和许用压力角。
a+c≤b+d (若c>b)
从而可得
a≤b
a≤c
a≤d
(2) 若d≤a 则可得
dd
a b
b a
c c
d c a b
(b c) (c b)
dd
a b
d c
平面连杆机构有曲柄的条件: 1)连架杆与机架中必有一杆为四杆机构中的最 短杆;
2)最短杆与最长杆之和应小于或等于其余两杆
的杆长之和。(杆长和条件)
•
作业标准记得牢,驾轻就熟除烦恼。2 020年1 0月24 日星期 六7时27 分18秒 07:27:1 824 October 2020
•
好的事情马上就会到来,一切都是最 好的安 排。上 午7时27 分18秒 上午7 时27分0 7:27:18 20.10.2 4
•
一马当先,全员举绩,梅开二度,业 绩保底 。20.10. 2420.1 0.2407:2707:27 :1807:2 7:18Oc t-20
四、运动的连续性
一、平面四杆机构有曲柄的条件
B2
B 1a
2C bc 3
F
E B1 C A E’F’D b+c
d
G’
|b-c|
A 4D G
|d-a|
d+a
欲使连架杆AB成为曲柄,则必须使AB通过与 机架共线的两个位置,即必须满足
a+d≤b+c
(4-1)
|d-a|≥|b-c|
(4-2)
(1) 若d≥a,则可得 a+b≤c+d (若b>c)
接触,且易于制造,易于保证所要求的制造精度 3)能够实现多种运动轨迹曲线和运动规律,工程
上常用来作为直接完成某种轨迹要求的执行机构
不足之处: 1)不宜于传递高速运动。 2)可能产生较大的运动累积误差。
§2-1 平面四杆机构的基本形式、演变
及其应用
一、平面四杆机构的基本形式
连杆
在连架杆中,能
连架杆 1
第二章
平面连杆机构及其 设计
一、 连杆机构
若干个构件全用低副 联接而成的机构,也 称之为低副机构。
二、连杆机构的分类
1、根据构件之间的相对运动分为:
平面连杆机构,空间连杆机构。 2、根据机构中构件数目分为:
曲柄滑块机 构待定
四杆机构、五杆机构、六杆机构等。
三、平面连杆机构的特点
1)适用于传递较大的动力,常用于动力机械。 2)依靠运动副元素的几何形面保持构件间的相互
2
A1
C3
B2 A1
C3
2
B
1
A
C
3
B
2C
1
A
3
s s lAB sin
2 取不同构件为机架(机构倒置)
曲柄滑块机构
导杆机构
曲柄摇块机构
直动滑杆机构
3 扩大转动副
B
C
A
C2
C1
B
C
A
§2-2 平面四杆机构设计中的共性问题
一、平面四杆机构有曲柄的条件 二、平面四杆机构输出件的急回特性
三、平面机构的压力角和传动角、死点
四、运动的连续性
连杆机构的运动连续性:指该机构在运动中能够连续 实现给定的各个位置。
(B’B)
C1
C C2
1
C1 C3 C2
A
D
B1 B3
2
A
B2
D
C’1 C’ C’2
连杆机构的运动不连续的问题:错位不连续;错 序不连续。
2–3、平面四杆机构的运动设计
1、基本问题
根据机构所提出的运动条件,确定机构的运动学尺寸, 画出机构运动简图。
•
安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20. 10.2407 :27:180 7:27Oc t-2024- Oct-20
•
加强交通建设管理,确保工程建设质 量。07:27:1807 :27:180 7:27Saturday , October 24, 2020
•
安全在于心细,事故出在麻痹。20.10. 2420.1 0.2407:27:1807 :27:18 October 24, 2020
铰链四杆机构类型的判断条件: 1)在满足杆长和的条件下:
(1)以最短杆的相邻构件为机架,则最短杆为曲柄,另 一连架杆为摇杆,即该机构为曲柄摇杆机构; (2)以最短杆为机架,则两连架杆为曲柄,该机构为双 曲柄机构; (3)以最短杆的对边构件为机架,均无曲柄存在,即该 机构为双摇杆机构。