超声波测距系统的设计与实现
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断发展,高精度测距技术广泛应用于机器人、智能家居、无人驾驶等领域。
本文旨在设计一个基于STM32单片机的高精度超声波测距系统,该系统通过超声波测距原理,实现对目标物体的精确测距。
二、系统设计要求1. 高精度:系统应具备高精度的测距能力,误差应控制在一定范围内。
2. 稳定性:系统应具有良好的稳定性,能够在不同环境下保持稳定的测距性能。
3. 实时性:系统应具备实时测距功能,能够快速响应并输出测距结果。
4. 易于集成:系统应易于与其他设备进行集成,方便实际应用。
三、硬件设计1. 主控制器:采用STM32单片机作为主控制器,负责整个系统的控制与数据处理。
2. 超声波传感器:选用高性能的超声波传感器,实现测距功能。
3. 电源模块:为系统提供稳定的电源,保证系统的正常工作。
4. 通信接口:根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
四、软件设计1. 驱动程序设计:编写超声波传感器的驱动程序,实现对传感器的控制与数据读取。
2. 数据处理程序:对读取的超声波数据进行处理,计算目标物体的距离。
3. 实时性处理:采用中断或定时器等方式,实现实时测距功能。
4. 通信程序设计:根据实际需求,编写与其他设备进行通信的程序。
五、系统实现1. 超声波传感器的工作原理是通过发送超声波并接收其反射回来的时间来计算距离。
系统通过STM32单片机的GPIO口控制超声波传感器的发送与接收。
2. 在软件设计中,通过编写驱动程序,实现对超声波传感器的控制与数据读取。
数据处理由STM32单片机进行计算,将读取的超声波数据进行处理,得到目标物体的距离。
3. 为了保证系统的实时性,采用中断或定时器等方式,实现实时测距功能。
当超声波传感器接收到反射回来的超声波时,中断或定时器触发,STM32单片机立即进行数据处理,并输出测距结果。
4. 根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
超声波测距系统的设计与实现
超声波测距系统的设计与实现作者:邓毅郭小华来源:《中国新技术新产品》2019年第10期摘; 要:为了提高系统测距精度,该文将在以往研究的基础上,选取STM32作为核心处理器,开发一套超声波测距系统。
测试结果表明,该系统在漏波情况和不漏波情况下测量精度较高,且不受温度影响。
关键词:测距系统;超声波;STM23中图分类号:TN912; ; ; ; ; 文献标志码:A超声波测距具有防尘防雾功效,属于非接触测量工具,在各个领域均有所应用。
在实际应用中通过观察测量精度,可以有效判断系统的优势和劣势。
传统的超声波测距系统在硬件选取和软件开发上均存在不足,导致误差较大,大小在1 cm左右。
因此,改进超声波测距系统研究显得尤为重要。
1 超声波测距原理超声波是一种机械波,在20 kHz以上频率弹性介质中传播。
测量距离的原理如下:选取发射转换器作为操作工具,利用此工具向外发射超声波并计时,测量超声波在空气中的传输速率。
当超声波遇到障碍物会立即反射,当接收器接收到超声波以后停止计时。
假设测量目标障碍物与发射起始点之间的距离为S(单位:m),计时时间为t(单位:s),超声波在空气介质中传输速度为v(单位:m/s),可以得到以下关系:在公式(2)和公式(3)中,H代表传感器布设位置与障碍物之间的直线距离;L代表传感器与换能器之间的距离。
将公式(1)、公式(2)、公式(3)组合到一起,可以得到以下关系:假设传输频率为f,波长为λ,则2项参数与声波传输速度之间的关系公式为:2 基于STM32的超声波测距系统的设计与实现基于超声波测距原理,该文选取STM32作为核心控制器,设计一套超声波测距系统,设计内容分为系统硬件、系统软件、上位机。
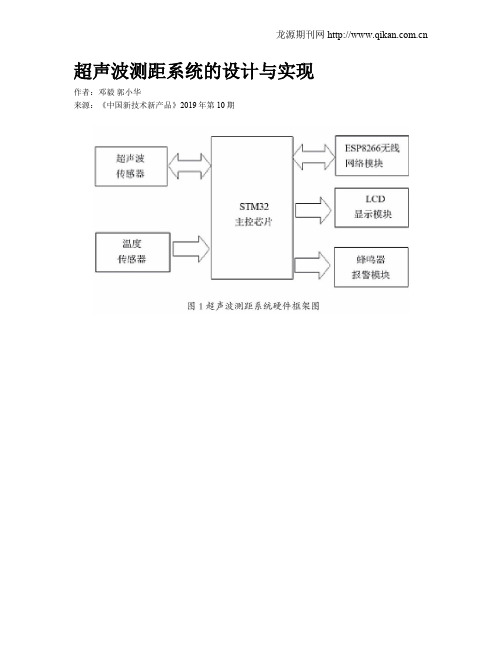
2.1 系统硬件超声波测距系统硬件由蜂鸣器、LCD显示模块、ESP8266无线网络模块、STM32主控芯片、温度传感器、超声波传感器6个部分构成。
如图1所示为超声波测距系统硬件框架图。
2.1.1 蜂鸣器蜂鸣器主要起到警示作用,如果系统运行发生异常,即测量距离超出安全范围,则系统自动启动蜂鸣器,发出警报。
基于单片机的超声波测距报警器的设计与实现
摘要随着科学技术的快速发展,超声波将在科学技术中的应用越来越广。
本文对超声波传感器测距的可能性进行了理论分析,利用模拟电子、数字电子、微机接口、超声波换能器、以及超声波在介质的传播特性等知识,采用以STC89C52单片机为核心的低成本、高精度、微型化数字显示超声波测距的硬件电路和软件设计方法在此基础上设计了系统的总体方案,最后通过硬件和软件实现了各个功能模块。
为了保证超声波测距传感器的可靠性和稳定性,采取了相应的抗干扰措施。
就超声波的传播特性,超声波换能器的工作特性、超声波发射、接收、超声微弱信号放大、波形整形、速度变换、语音提示电路及系统功能软件等做了详细说明.实现障碍物的距离测试、显示和报警,超声波测距范围30CM-300CM,精度在十厘米左右。
这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于倒车雷达、建筑施工工地以及一些工业现场,例如:测量液位、井深、管道长度等场合。
可以广泛应用于工业生产、医学检查、日常生活、无人驾驶汽车、自动化业现场的自动引导小车、机器人、液位计等。
关键词: 单片机STC89C52,超声波,传感器,LCD,测量距DESIGN AND IMPLEMENTATION BASED ON OF ULTRASONIC RANGING ALARM MICROCONTROLLERABSTRACTIn recent years with the rapid development of technology, SCM applications are continually deepening, led the traditional control of the Crescent benefit update. In real-time detection and control of the MCU application systems, SCM is often as a core component to use,SCM is the main function of the computer components are integrated in a chip micro-computer. It is a set of interfaces and multiple counts integrates microcontrollers, are widely used in industrial automation products and smart, and 51 is a microcontroller, the most typical and the most representative one.The main application STC89C52 design as the core control, monitor, drive circuit and system integration. Give full play to the MCU performance. The advantage of simple circuit hardware, software, functional and reliable control system, the use and have some reference value.KEYWORDS: STC89C52, ultrasonic wave, sensor,, measuring distance目录摘要 (I)ABSTRACT (II)1.绪论 (1)1.1超声波测距报警器的概述 (1)1.1.1课题背景 (1)1.1.2课题设计的意义 (1)1.1.3超声波测距在汽车上应用的介绍 (2)1.2课题的方案设计与论证 (3)1.2.1系统总体设计 (3)1.2.2设计方案的论证 (5)2.超声波测距报警器关键元器件的选择与简介 (7)2.1STC89C52的简介 (7)2.2超声波发射模块74HC04的简介 (10)2.3超声波检测模块CX20106A的简介 (11)2.4LED数码显示管的简介 (12)2.540RS/UT180防水型超声波传感器的简介 (14)3.超声波测距报警器的硬件设计 (15)3.1硬件电路原理图 (15)3.2单片机最小硬件系统 (15)3.3复位电路 (17)3.4显示电路 (18)3.5超声波发送与接收模块 (18)3.6报警模块 (20)4.超声波测距报警器的软件设计 (21)4.1超声波汽车防撞电路的算法设计 (21)4.2系统软件流程图 (21)4.2.1主程序流程图 (21)4.2.2按键中断子程序流程图 (22)4.2.3软件去抖动流程图 (23)4.3系统程序 (24)5.超声波测距报警器的系统调试 (32)5.1硬件调试 (32)5.1.1基本电路板检查: (32)5.1.2主控模块调试: (32)5.2软件调试 (32)结论 (34)参考文献 (35)致谢.......................................................................................................... 错误!未定义书签。
超声波测距系统的设计

超声波测距系统的设计引言:一、硬件设计:1.选择传感器:超声波传感器是测距系统的核心部件,通常采用脉冲法进行测量。
在选择传感器时,应考虑工作频率、测量范围、精度和稳定性等参数,并根据实际需求进行选择。
2.驱动电路设计:超声波传感器需要高频信号进行激励,设计驱动电路时需要根据传感器的工作要求来设计合适的电路,保证信号稳定且能够满足传感器的工作需求。
3.接收电路设计:超声波传感器产生的脉冲回波需要经过接收电路进行信号放大和滤波处理,设计接收电路时需要考虑信号放大的增益、滤波器的截止频率以及抗干扰能力等因素。
4.控制板设计:控制板是超声波测距系统中的核心控制器,负责控制测距过程、数据处理以及通信等功能。
在设计控制板时,应根据系统的要求选择合适的微控制器或单片机,并设计合理的电路布局和电源电路。
二、软件编程:1.驱动程序开发:根据传感器的规格书和数据手册,编写相应的驱动程序,实现对超声波传感器的激励和接收。
2.距离计算算法开发:通过测量超声波的往返时间来计算距离,根据声速和时间的关系进行距离计算,并根据实际情况对计算结果进行修正。
3.数据处理和显示:根据实际需求,对测量得到的距离进行处理,并将结果显示在合适的显示设备上,如LCD屏幕或计算机等。
4.数据通信:如果需要将测量结果传输至其他设备或系统,则需要编写相应的数据通信程序,实现数据的传输和接收。
三、系统测试与优化:1.测试传感器性能:测试测距系统的稳定性、精度和灵敏度等性能指标,根据测试结果对系统参数进行优化和调整。
2.系统校准:超声波测距系统可能受到环境温度、湿度和声速等因素的影响,需要进行校准以提高测量精度。
3.系统集成与实际应用:将超声波测距系统与实际应用场景进行集成,进行实际测试和验证。
总结:超声波测距系统的设计包括硬件设计和软件编程两个方面,其中硬件设计主要包括传感器选择、驱动电路设计和接收电路设计等;软件编程主要包括驱动程序开发、距离计算算法开发、数据处理和显示以及数据通信等。
超声波测距设计毕业设计

超声波测距设计毕业设计一、引言距离测量在许多领域都具有重要的应用,如工业自动化、机器人导航、汽车防撞等。
超声波测距作为一种非接触式的测量方法,具有测量精度高、响应速度快、成本低等优点,因此在实际工程中得到了广泛的应用。
本次毕业设计旨在设计一种基于超声波的测距系统,实现对目标物体距离的准确测量。
二、超声波测距原理超声波是一种频率高于 20kHz 的机械波,其在空气中的传播速度约为 340m/s。
超声波测距的原理是通过发射超声波脉冲,并测量其从发射到接收的时间间隔,然后根据声速和时间间隔计算出目标物体与传感器之间的距离。
假设发射超声波脉冲的时刻为 t1,接收到回波的时刻为 t2,声速为c,距离为 d,则距离 d 可以通过以下公式计算:d = c ×(t2 t1) / 2三、系统硬件设计(一)超声波发射模块超声波发射模块主要由超声波换能器和驱动电路组成。
超声波换能器将电信号转换为超声波信号发射出去,驱动电路则提供足够的功率和电压来驱动换能器工作。
(二)超声波接收模块超声波接收模块主要由超声波换能器、前置放大器、带通滤波器和比较器组成。
换能器将接收到的超声波信号转换为电信号,前置放大器对信号进行放大,带通滤波器去除噪声和干扰,比较器将信号整形为方波信号。
(三)控制与处理模块控制与处理模块采用单片机作为核心,负责控制超声波的发射和接收,测量时间间隔,并计算距离。
同时,单片机还可以将测量结果通过显示模块进行显示,或者通过通信模块与上位机进行通信。
(四)显示模块显示模块用于显示测量结果,可以采用液晶显示屏(LCD)或数码管。
(五)电源模块电源模块为整个系统提供稳定的电源,包括 5V 和 33V 等不同的电压等级。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机的初始化、定时器的初始化、端口的初始化等。
然后进入主循环,不断地发射超声波脉冲,并等待接收回波。
当接收到回波后,计算距离,并进行显示或通信。
基于单片机的超声波测距仪系统设计
基于单片机的超声波测距仪系统设计一、本文概述随着科技的不断发展,超声波测距技术因其非接触性、高精度和快速响应等优点,在机器人导航、工业自动化、智能家居等领域得到了广泛应用。
本文旨在设计一种基于单片机的超声波测距仪系统,通过深入研究超声波测距原理,结合单片机控制技术,实现一种低成本、高性能的超声波测距解决方案。
文章首先介绍了超声波测距的基本原理和常用方法,然后详细阐述了基于单片机的超声波测距仪的硬件设计,包括超声波发射电路、接收电路、信号处理电路等关键部分的设计思路和实施方法。
接着,文章对测距软件算法进行了深入探讨,包括超声波传播时间的测量、距离计算等关键步骤的实现。
文章对设计的系统进行了测试,验证了系统的可靠性和稳定性。
通过本文的研究,希望能为相关领域提供有益的参考,推动超声波测距技术的发展。
二、超声波测距原理超声波测距是一种非接触式的距离测量方式,其基本原理是利用超声波在空气中的传播速度以及回声的时间差来计算距离。
超声波测距仪主要由超声波发射器、接收器和控制电路组成。
在超声波测距仪中,单片机发出控制信号给超声波发射器,使其发射出一定频率的超声波。
当超声波在空气中传播遇到障碍物时,会发生反射,反射波被接收器接收。
由于超声波在空气中的传播速度已知(约为340m/s),单片机可以通过测量发射信号和接收反射信号之间的时间差,即回声时间,来计算出超声波从发射到接收所经过的距离。
具体计算公式为:距离 = (超声波速度×回声时间) / 2。
需要注意的是,由于超声波在传播过程中会受到空气温度、湿度、风速等因素的影响,因此实际测量中需要对这些因素进行补偿,以提高测距的精度。
为了避免测量误差,还需要在硬件设计中考虑超声波发射和接收的角度、距离以及环境噪声等因素。
在单片机系统中,通过编程实现超声波发射、接收以及回声时间的测量。
单片机可以根据实际需要选择合适的计时器或定时器,对发射和接收信号进行精确的时间记录,并通过算法计算出距离值。
超声波测距系统设计
超声波测距系统设计一、设计原理超声波测距原理基于声波的传播速度和时间的关系。
声波在空气中传播的速度约为343m/s。
当声波发射到目标物体上后,部分声波会被目标物体反射回来。
通过测量声波从发射到接收的时间差,再乘以声速即可计算出目标物体与传感器的距离。
二、硬件设计1.超声波发射器:超声波发射器是实现超声波测距的关键部件,它负责产生超声波脉冲并将其发射出去。
常用的超声波发射器是压电传感器,它具有快速响应、高灵敏度等特点。
2.超声波接收器:超声波接收器用于接收从目标物体反射回来的超声波,并将其转化为电信号。
同样,压电传感器也可以用作超声波接收器。
3.控制电路:控制电路负责控制超声波发射器和接收器的工作。
例如,它可以通过控制超声波发射器的工作时间来产生超声波脉冲。
同时,控制电路还需要接收超声波接收器输出的电信号,并通过计时器来测量声波从发射到接收的时间差。
4.显示屏:显示屏用于显示测距结果,通过显示屏可以直观地观察到目标物体与传感器的距离。
三、软件设计1.信号处理:在接收到超声波接收器输出的电信号后,需要对信号进行处理。
通常情况下,控制电路会将接收到的信号由模拟信号转换为数字信号。
然后,可以使用特定的算法对数字信号进行处理,例如滤波、峰值检测等,以获取稳定的距离数据。
2.距离计算:根据声波从发射到接收的时间差和声速,可以计算出目标物体与传感器的距离。
计算公式为:距离=速度×时间差。
3.结果显示:最后,将计算得到的距离结果显示在屏幕上,用户可以直接观察到距离结果。
四、总结超声波测距系统是一种简单、实用的测距技术。
通过合理的硬件设计和严密的软件设计,可以实现可靠、准确的测距功能。
同时,超声波测距系统还具有成本低、测量范围广等优点,被广泛应用于自动控制、车辆定位和智能机器人等领域。
基于超声波传感器的测距系统设计
基于超声波传感器的测距系统设计超声波传感器是一种常见的测距技术,其原理是利用声波在空气中的传播速度来测量距离。
它通常由超声波发射器和接收器组成,通过发射超声波并接收回波来计算与目标物体的距离。
在设计超声波测距系统时,需要考虑以下几个方面:1.硬件设计:-选择合适的超声波传感器:根据实际需要确定超声波传感器的工作频率、探测范围和精度等参数。
-放置传感器:根据实际应用场景确定传感器的放置位置,以确保尽可能减少干扰和误差。
-连接电路设计:根据传感器规格书提供的引脚定义,设计合适的电路连接,包括供电和信号线的连接。
-控制电路设计:根据传感器的工作方式,设计合适的控制电路,包括用于触发测距的信号源和用于接收并处理超声波信号的电路。
-数据处理电路设计:设计合适的数据处理电路,用于接收并处理超声波传感器返回的距离信息。
2.软件设计:-控制程序设计:根据硬件设计确定的控制方式,编写相应的控制程序,包括触发超声波发射和接收回波的时序控制。
-数据处理程序设计:根据接收到的超声波信号,进行合适的数据处理,提取有效的距离信息,并进行相关的校正和滤波处理。
-距离计算程序设计:根据超声波在空气中的传播速度,以及触发超声波发射和接收回波的时间差,计算与目标物体的距离。
3.系统测试和优化:-进行功能性测试:在设计完成后,对测距系统进行功能性测试,确保其能够正常工作。
-进行可靠性测试:通过在实际环境中进行测试,检验系统的测距精度和稳定性。
-进行系统优化:根据测试结果,对系统进行优化,包括硬件和软件方面,以提高测距系统的性能。
超声波传感器的测距系统在实际应用中具有广泛的应用。
例如,在汽车倒车雷达系统中,超声波传感器可以用于测量汽车与障碍物之间的距离,以辅助驾驶员进行安全驾驶。
在工业自动化控制中,超声波传感器可以用于测量物体的位置和距离,以实现精确控制和定位。
此外,超声波传感器的测距系统也可应用于无人机导航、智能家居和机器人等领域。
基于单片机控制的超声波测距系统设计
基于单片机控制的超声波测距系统设计1. 引言超声波测距技术是一种常见的非接触式测距方法,广泛应用于工业自动化、机器人导航、智能交通等领域。
本文旨在设计一种基于单片机控制的超声波测距系统,通过对系统的硬件和软件设计进行详细分析和研究,实现高精度的测距功能。
2. 系统硬件设计2.1 超声波传感器选择超声波传感器是实现超声波测距的核心组件。
根据应用需求,选择合适的超声波传感器非常重要。
本文选择了XX型号的超声波传感器,该传感器具有高精度、稳定性好等特点。
2.2 单片机选择在本系统中,单片机作为控制核心起到了重要作用。
根据需求分析和性能要求,我们选择了XX型号单片机作为控制核心。
该单片机具有较高的计算能力和丰富的外设接口。
2.3 电路设计为了实现稳定可靠的工作状态,我们对整个电路进行了详细设计。
包括电源电路、信号放大电路、滤波电路等部分。
通过合理的电路设计,可以提高系统的抗干扰能力和测量精度。
3. 系统软件设计3.1 系统流程设计根据测距系统的功能需求,我们设计了详细的系统流程。
主要包括初始化、触发超声波发射、接收超声波回波、测量距离和显示结果等步骤。
通过合理的流程设计,可以保证系统的稳定性和可靠性。
3.2 程序框架设计在单片机控制下,我们编写了相应的程序代码。
根据系统流程,我们将代码分为多个模块,并采用模块化编程方式进行开发。
通过良好的程序框架设计,可以提高代码可读性和维护性。
3.3 软件功能实现在软件开发过程中,我们实现了多项功能。
包括超声波信号发射控制、回波信号接收与处理、距离计算算法等部分。
通过详细分析每个功能模块,并进行适当优化,可以提高系统整体性能。
4. 系统测试与优化4.1 功能测试在完成硬件和软件设计后,我们对整个测距系统进行了全面测试。
主要包括触发超声波信号并接收回波信号,计算距离并显示结果等功能。
通过测试,可以验证系统的功能是否符合设计要求。
4.2 精度测试为了评估系统的测量精度,我们设计了一系列测试用例,并对测量结果进行统计和分析。
超声波测量系统的设计与实现
超声波测量系统的设计与实现随着科技的发展,超声波测量技术逐渐应用到日常生活中。
它广泛应用于水位测量、流量测量、非接触式距离测量等多个领域,成为了不可或缺的一项技术。
在本文中,将介绍超声波测量系统的设计与实现,包括硬件电路设计、软件设计和调试过程。
硬件电路设计超声波测量系统的主要硬件部分包括发射部分和接收部分,发射部分产生超声波,接收部分接收超声波并处理反射数据。
发射部分采用了压电陶瓷片作为发射器,由信号发生器输入40kHz信号进行驱动,将能量通过发射壁反射到被测物体上。
接收部分采用压电陶瓷片作为接收器,将接收到的声波转化为电信号通过前置放大器放大后输出到主控芯片上进行信号处理。
在硬件设计中,需要考虑到系统的抗干扰性。
在发射和接收过程中,由于电机振动等因素的影响,会产生一些噪声信号。
在设计时需要添加滤波电路,滤除这些干扰信号。
另外,在控制部分还需要加入外接触发电路,将测量信号和触发信号分开处理,避免测量数据的错误。
软件设计超声波测量系统的软件部分主要涉及到信号处理和算法实现。
在信号处理方面,需要对接收的信号进行滤波、去噪和放大等处理,使得得到的数据更加精确可靠。
在算法实现方面,常用的测量方法有时差法和频率计算法。
其中,时差法是常用的测量方法,通过测定接收到的两路超声波信号之间的时间差来计算被测物体的距离。
在实际的软件设计中,还需要考虑到测量精度的问题。
由于超声波在不同介质的传播速度不同,所以在测量距离时需要对介质进行校正,以提高测量精度。
另外,在信号处理和算法实现中需要考虑到信号处理算法的运行速度和效率,以提高整个系统的响应速度。
调试过程在硬件和软件的设计完成后,需要进行整个系统的调试工作。
在调试过程中需要对发射和接收部分进行充分的测试,以保证它们能够正常工作。
在测试时需要注意测量距离的精度和稳定性,以及系统响应速度的快慢。
另外,在调试过程中还需要对测量算法进行校准和调整,以提高测量精度。
结语总的来说,超声波测量系统的设计与实现涉及到硬件和软件两个方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国新技术新产品
2019 NO.5(下)
- 30 -
高 新 技 术
超声波测距具有防尘防雾功效,属于非接触测量工具,
在各个领域均有所应用。在实际应用中通过观察测量精度,
可以有效判断系统的优势和劣势。传统的超声波测距系统在
硬件选取和软件开发上均存在不足,导致误差较大,大小在
1 cm左右。因此,改进超声波测距系统研究显得尤为重要。
1 超声波测距原理
超声波是一种机械波,在20 kHz以上频率弹性介质中传
播。测量距离的原理如下:
选取发射转换器作为操作工具,利用此工具向外发射
超声波并计时,测量超声波在空气中的传输速率。当超声波
遇到障碍物会立即反射,当接收器接收到超声波以后停止计
时。
假设测量目标障碍物与发射起始点之间的距离为S(单
位:m),计时时间为t(单位:s),超声波在空气介质中传
输速度为v(单位:m/s),可以得到以下关系:
S=vt
/2 (1)
H=Scosθ
(2)
H
2+L2=S2
(3)
在公式(2)和公式(3)中,H代表传感器布设位置与
障碍物之间的直线距离;L代表传感器与换能器之间的距离。
将公式(1)、公式(2)、公式(3)组合到一起,可以得到以
下关系:
(4)
假设传输频率为f,波长为λ,则2项参数与声波传输速
度之间的关系公式为:
v=λf
(5)
2 基于STM32的超声波测距系统的设计与实现
基于超声波测距原理,该文选取STM32作为核心控制
器,设计一套超声波测距系统,设计内容分为系统硬件、系
统软件、上位机。
2.1 系统硬件
超声波测距系统硬件由蜂鸣器、LCD显示模块、ESP8266
无线网络模块、STM32主控芯片、温度传感器、超声波传感
器6个部分构成。如图1所示为超声波测距系统硬件框架图。
2.1.1 蜂鸣器
蜂鸣器主要起到警示作用,如果系统运行发生异常,即
测量距离超出安全范围,则系统自动启动蜂鸣器,发出警报。
2.1.2 LCD显示模块
该功能模块主要是借助液晶显示屏显示信息采集终端
的数据信息,便于用户查看数据。
2.1.3 ESP8266无线网络模块
该无线网络模块采用的传输协议为TCP/IP协议,支持距
离数据和温度数据传输,从现场采集终端传输至上位机。
2.1.4 STM32主控芯片
该文选取STM32系列单片机作为核心控制器,利用此控
制器下达各个器件的控制命令。此单片机主频率为168 MHz,
定时器误差为0.002 mm,精度为0.005952 μs。由于STM32单
片机的误差较小,所以在实际应用中其误差可以忽略不计。
2.1.5 温度传感器
该文选取DS18B20作为系统温度传感器,此传感器的误
差精度为±0.5 ℃,对声速测量造成的影响大约为±305 m/s,
在误差允许范围之内。
2.1.6 超声波传感器
该文选取HC-SR04型号传感器作为超声波传感器,与
同种类型传感器相比,该传感器测量精度更高一些,并且运
行稳定。
该传感器是系统获取信号的主要器件之一,含有4个引
脚,除了接地GND和接电VCC引脚以外,还包括回波引脚
(Echo)、脉冲出发引脚(Trig)。系统上电以后,脉冲触发引
脚接收到发射端发送来超声波信号以后,回波引脚电平将从
低电平转换为高电平。
2.2 系统软件
该系统采用Keil5开发系统软件,利用C语言编写系统
程序。如图2所示为系统软件开发流程。
超声波测距系统的设计与实现
邓毅郭小华
(广东电网有限责任公司佛山供电局,广东 佛山 528000)
摘要:为了提高系统测距精度,该文将在以往研究的基础上,选取STM32作为核心处理器,开发一套超声波测
距系统。测试结果表明,该系统在漏波情况和不漏波情况下测量精度较高,且不受温度影响。
关键词:测距系统;超声波;STM23
中图分类号:TN912文献标志码:A
图1超声波测距系统硬件框架图
中国新技术新产品
2019 NO.5(下)
- 31 -
高 新 技 术
第一步:系统初始化。
第二步:测量温度数据和距离数据。
第三步:修整三角函数和滤波算法。
第四步:判断修整后的阈值的超神波测量距离之间大小
关系,如果测量距离超出了阈值,则蜂鸣器发出警报,执行
第五步;反之,执行第五步。
第五步:借助LCD液晶显示屏显示数据信息,同时返回
第二步。
在开发系统软件过程中,考虑到接收器和换能器之间存
在一定距离,容易影响测量距离精度,即测量得到的距离与
实际距离不符。按照该文给出的公式(3)的距离关系可知,
实际距离H小于测量距离S。为了提高测量精度,不可以忽
略H与S之间的误差。针对此问题,该文在对系统软件进行
开发时,利用公式(3)对函数进行修整,经过计算得到实际
距离。如果H为2.7 cm,则L取值为1.35 cm。
该系统采用频率为40 kHz的超声波信号,信号在空气中
的传输速度为340 m/s,经过计算得到长度λ=0.85 cm。在不漏
掉脉冲波形的情况下,误差较小,满足系统测量要求。如果
在信号采集与传输过程中漏掉脉冲,采取复小波变换法,检
测回波包络峰值,或采用中位值平均滤波算法进行处理,最
终测量结果取平均值。
2.3 上位机
该系统采用Lab VIEW软件进行开发,直接嵌入C语言。
上位机界面开发除了用户IP地址管理功能以外,还包括实时
数据部分。如图3所示为上位机实时数据测量与报警功能实
现界面。
图3上位机实时数据测量与报警功能实现界面
在图3中,设定了测量距离、当前环境温度、预设报警
值、当前报警值4个功能框,能够采集和设定数据信息,便
于用户操作。
3 系统测试分析
为了验证该文设计的超声波测距系统设计方案的可靠
性,该文对3种情况下系统运行效果进行测试分析。
3.1 不漏波形情况
在不漏波形情况下,对系统测量精度进行测试分析,表
1为测量结果。
表1不漏波形情况测量结果
序号测量值(cm)实际值(cm)相对误差(cm)绝对误差(%)
130.2230.150.070.23
233.7833.860.080.24
通过观察表1中的数据可知,在不漏波的情况下,该系统的
测量误差在0.24%以下,满足系统测量精度要求。
3.2 漏波形情况
针对漏波情况,该文采取中位值平均滤波算法进行处
理,得到表2中的测试结果。
表2漏波形情况测量结果
序号
未处理处理
测量值(cm)实际值
(cm)
相对
误差
(cm)
绝对误差(%)测量值(cm)实际值
(cm)
相对
误差
(cm)
绝对误
差(%)
130.2232.552.337.16 %32.0432.550.511.57
235.8734.201.674.88 %33.9934.200.210.61
通过观察表2中的测试结果可知,采取中位值平均滤波算法
处理后的数值误差在允许范围之内。
3.3 温度变化情况
为了探究温度变化是否会对系统测量精度造成影响,该
文对不同温度下的测量精度进行测试分析,见表3。
表3 不同温度条件下的测试结果
序号温度(℃)
测量值(cm)实际值(cm)相对误差(cm)绝对误差
(%)
121.340.0240.000.020.50
224.535.3735.300.070.19
通过观察表3中的数据可知,该系统运行过程中不受温度影
响。
4 结语
该文在传统超声波测距系统基础上,选取STM32作为
核心处理器,提出了超声波测距系统研究,分为系统硬件、
系统软件、上位机3个部分进行设计。测试结果表明,该系
统在漏波情况和不漏波情况下测量精度较高,且不受温度影
响。
参考文献
[1]张悦,陈劲操.基于单相全桥逆变拓扑的超声波测距系统
设计[J].仪表技术与传感器,2016(4):67-70.
[2]孔维正,靳宝全,王宇,等.矿用本质安全超声测距电路
系统设计[J].工矿自动化,2016,42(10):65-69.
[3]王浩,谭振文,王治彪,等.基于STM32的分体式超声测
距与目标定位系统[J].仪表技术与传感器,2017(2):58-61.
[4]王盟.基于DSP与超声波测距的农业机器人定位与避障控
制[J].农机化研究,2017,39(8):207-211.
图2 系统软件开发流程