一种水面清洁机器人及其系统设计
微小型自主式水下机器人系统设计及试验

微小型自主式水下机器人系统设计及试验魏延辉;田海宝;杜振振;刘鑫;郭志军;赵大威【摘要】This paper presents the design of the mini-AUV,which is used to research the intelligent control methods of the autonomous underwater vehicle(AUV). First,the system structure and key subsystem of the mini-AUV are introduced in detail. In order to solve the motion control system′s coupling problem,three divided motion control systems are used to fulfill the AUV movement control target. Some AUV motion control experiments were done. The results show that the mini-AUV is able to complete all of the autonomous motion control targets,providing an impor-tant reference for the same type of underwater vehicles.%为了解决自主式水下机器人智能控制问题,设计了一种微小型自主式水下机器人。
介绍了微小型自主式水下机器人的系统结构和关键部分系统,然后针对运动控制系统耦合问题,采用3个分控制系统方式实现水下机器人运动控制,最后进行了自主式水下机器人运动控制的试验研究。
试验结果表明:研制微小型自主式水下机器人及其控制系统能够完成自主运动任务,实现自主化,为同类型的水下机器人提供参考。
基于PLC的家用清扫机器人控制系统设计__开题报告
Chinese Journal of Aeronautics20,2007:266-271.
[9]宋章军,陈恳,杨向东. 基于红外测距传感器信息的通风管道清扫机器人控制算法研究[J],制造业自动化,2006,28(05):44-47.
2016年1月20日-2016年2月2日
学习掌握三菱PLC的基本编程。
给出硬件设计框图。
2016年2月3日-2016年4月6日
编写出了该控制系统的程序。
初步完成毕业设计相关内容,并进行中期检查。
2016年4月7日-2016年4月21日
完善程序、利PROTUES软件,整理仿真结果和论文文档。
完成论文初稿的书写。
2?拟采取的研究方法技术路线实施方案及可行性分析研究方法研究方法是利用创意之星模块化机器人套件在搭建一个家用清洁机器人的基础上先根据实际情况进行各个舵机的id和属性再通过northstar软件进行前进转向步态编程并将这些独立的方程块组合完成程序流程图的建立最后对程序进行编译并下载到控制器中根据距离传感器采集的数据进行相应的前进或转向并完成房间的清洁工作这里主要研究机器人的运动对机器人如何清洁杂物不做详细研究
日本日立公司于2003年5月29日宣布,成功研发出了家用清洁机器人,它具有在房间自由行走并打扫卫生的自律行走机器人。它的行走速度最快为40cm/s,它受遥控器以及机身按钮进行操作。它的主要特点是:在机身下设计了一个最大限度为5cm的可动吸尘孔,以便能够将房间角落打扫干净。该机器人采用了螺旋式行走方式,从房间外围开始进行清扫,以便使工作更有效率。该公司还计划在清洁机器人机身上安装CCD相机,以便远程监控。
基于绳牵引的新型玻璃幕墙清洗机器人设计
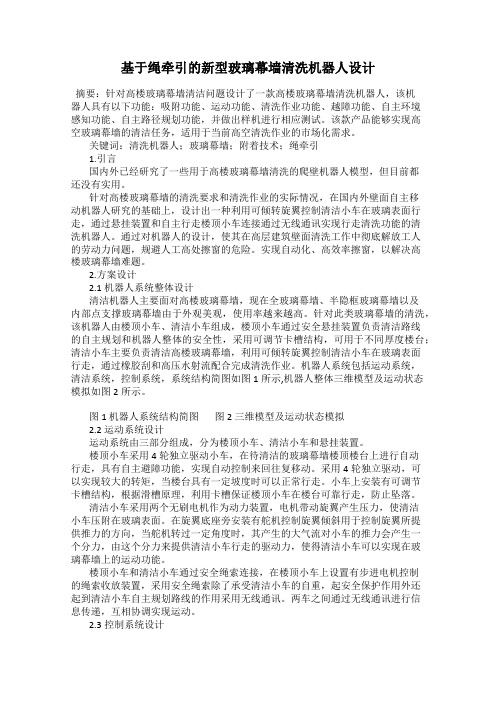
基于绳牵引的新型玻璃幕墙清洗机器人设计摘要:针对高楼玻璃幕墙清洁问题设计了一款高楼玻璃幕墙清洗机器人,该机器人具有以下功能:吸附功能、运动功能、清洗作业功能、越障功能、自主环境感知功能、自主路径规划功能,并做出样机进行相应测试。
该款产品能够实现高空玻璃幕墙的清洁任务,适用于当前高空清洗作业的市场化需求。
关键词:清洗机器人;玻璃幕墙;附着技术;绳牵引1.引言国内外已经研究了一些用于高楼玻璃幕墙清洗的爬壁机器人模型,但目前都还没有实用。
针对高楼玻璃幕墙的清洗要求和清洗作业的实际情况,在国内外壁面自主移动机器人研究的基础上,设计出一种利用可倾转旋翼控制清洁小车在玻璃表面行走,通过悬挂装置和自主行走楼顶小车连接通过无线通讯实现行走清洗功能的清洗机器人。
通过对机器人的设计,使其在高层建筑壁面清洗工作中彻底解放工人的劳动力问题,规避人工高处擦窗的危险。
实现自动化、高效率擦窗,以解决高楼玻璃幕墙难题。
2.方案设计2.1 机器人系统整体设计清洁机器人主要面对高楼玻璃幕墙,现在全玻璃幕墙、半隐框玻璃幕墙以及内部点支撑玻璃幕墙由于外观美观,使用率越来越高。
针对此类玻璃幕墙的清洗,该机器人由楼顶小车、清洁小车组成,楼顶小车通过安全悬挂装置负责清洁路线的自主规划和机器人整体的安全性,采用可调节卡槽结构,可用于不同厚度楼台;清洁小车主要负责清洁高楼玻璃幕墙,利用可倾转旋翼控制清洁小车在玻璃表面行走,通过橡胶刮和高压水射流配合完成清洗作业。
机器人系统包括运动系统,清洁系统,控制系统,系统结构简图如图1所示,机器人整体三维模型及运动状态模拟如图2所示。
图1 机器人系统结构简图图2 三维模型及运动状态模拟2.2 运动系统设计运动系统由三部分组成,分为楼顶小车、清洁小车和悬挂装置。
楼顶小车采用4轮独立驱动小车,在待清洁的玻璃幕墙楼顶楼台上进行自动行走,具有自主避障功能,实现自动控制来回往复移动。
采用4轮独立驱动,可以实现较大的转矩,当楼台具有一定坡度时可以正常行走。
水下机器人创业策划书
低成本水下机器人策划书申报项目:申报人:项目负责人:申报日期:低成本水下机器人策划书机器人项目创业计划执行概要水下机器人从20 世纪后半叶诞生,是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称无人遥控潜水器,主要运用在海上救援。
由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人日益成为开发海洋的重要工具。
在军事斗争中,无人化作战平台将在未来现代化战争中发挥重要的作用,无人舰艇将与无人地面战车、无人飞机一起在战场上进行高效卓越地作战。
另外,无论战争期间还是和平时期,水下机器人还可以定期对航道、训练场、舰艇机动区实施定期或不定期检查,保障这些水域的作业安全。
载人潜水器由人工输入信号操控各种动作,由潜水员和科学家通过观察窗直接观察外部环境。
其优点是由人工亲自做出各种核心决策,便于处理各种复杂问题,但是人生命安全的危险性增大,由于载人需要足够的耐压空间、可靠的生命安全保障和生命维持系统,这将为潜水器带来体积庞大、系统复杂、造价高昂、工作环境受限等不利因素。
有缆水下机器人(ROV)需要由电缆从母船接受动力,并且ROV 不是完全自主的,它需要人为的干预。
主要由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。
潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。
潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。
由于人们通过电缆对ROV 进行遥控操作,电缆对ROV 像“脐带”对于胎儿一样至关重要,但是由于细长的电缆悬在海中成为ROV 最脆弱的部分,大大限制了机器人的活动范围和工作效率。
无缆水下机器人(AUV)又称自治水下机器人、智能水下机器人,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面的技术集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成复杂海洋环境中的预定任务使命的机器人。
水下机器人ROV讲课教案
3.1.1 概述
水下机器人是一种可在水下移动、具有视觉和感知系统、通过 遥控或自主操作方式、使用机械手或其他工具代替或辅助人去 完成水下作业任务的装置。
水下机器人具有四个基本特点。 (1)可移动性 (2)能够感知机器人的外部和内部环境特性 (3)拥有完成使命所需的执行机构 (4)能自主地或在人的参与下完成水下作业 3.1.2 水下机器人分类及用途
常规的传感器包括:
成像声纳、罗盘、深度压力 传感器、高度计等。
水下计算机、驱动器、控制模块,
水下电子单元包括:
安装在常压的密封仓内。
动力、压力、温度、漏
系统监视所需要的传感元件包括:。
水等
b.中继器 c.吊放系统
为了能迅速、准确地将潜水器送到预定 工作水深和较快地收回到水面,同时为 了减弱母船摇摆及脐缆所受海流阻力给 潜水器运动和作业带来的附加阻力、干 扰和影响,一般有缆遥控水下机器人配 置中继器。中继器内储存系缆,并装有 系缆驱动收放机构,潜水器非工作状态
施,所有电气设备都需满足 船用电气设备的规范要求。
b·通讯系统 为水下机器人系统 的各个工作站点 (控制间、水面 设备、船长室)提供有线或无线
的通讯联系。
(5)中继器系统
中继器 (TMS)是有缆遥控水下机器人系统的重要设备之一。为 保持水下机器人本体在水下具有良好的动作灵活性、运动平稳性和 可操作控制性,在本体与吊放系统之间设置中继器。中继器直接由 皑装主缆吊放,在中继器与潜水器之间由具有中性浮力的系缆连接, 这样既消除皑装主缆、母船的升沉、纵倾和横摇等对它的影响,也 减少了本体推进系统所需功率,充分地发挥其本身的最大效率。
到吊放钢缆的作用,
任务书-基于PLC的家用清扫机器人控制系统设计 12.29

青岛黄海学院毕业设计(论文)任务书题目名称基于PLC的家用清扫机器人控制系统设计学院机电工程学院专业机械设计制造及其自动化学生姓名袁树林学号 1201111017 指导教师朱青青职称讲师下发年月日毕业设计(论文)学生须知1.认清毕业设计(论文)的重要性,认真学习理解《青岛黄海学院毕业设计(论文)工作管理规定》。
应听从指导教师(和督导教师)指导,定期向指导教师汇报工作进展情况。
2.在毕业设计(论文)过程中, 虚心学习,尊敬老师,勤于思考,善于实践,勇于创新,保质保量按时完成任务书规定的任务。
3.学生须严格遵守学校、学院及实验室的各项规章制度,爱护仪器设备,节约材料;在校外进行毕业设计(论文)的还要同时遵守所在单位的有关规章制度。
4.爱护公物,注意工作场所的卫生、整洁,培养文明学风与工作作风。
注意安全,自觉遵守各项安全管理规定。
5.遵守纪律、保证出勤,因病、事确需请假的,需征得指导教师的同意,按学校有关规定办理请假手续,请假超过全过程三分之一者,取消答辩资格,不予评定成绩。
擅自离开或请假逾期者,作旷课论处,旷课超过全过程四分之一者,取消答辩资格,不予评定成绩。
6.毕业设计(论文)所要求的各项工作都必须独立完成,不弄虚作假,不抄袭和拷贝别人的工作内容,严禁请他人代做否则毕业设计(论文)成绩作不及格处理。
7.毕业设计(论文)格式必须符合《青岛黄海学院毕业设计(论文)格式及撰写规范》的要求,否则不能取得参加答辩的资格。
8.毕业设计(论文)成果、资料应于答辩结束后及时交指导教师并转交学院收存,学生不得擅自带离学校。
9.有下列情况之一者,其毕业设计(论文)成绩记为不及格:(1)取消答辩资格者;(2)未完成毕业设计(论文)规定任务者;(3)抄袭、剽窃他人成果,或编造数据、情报、信息者;(4)试验、设计、立论或计算方法有严重错误,不符合科研工作基本要求者;(5)毕业设计(论文)质量未达到基本要求者;(6)无正当原因未参加答辩者。
家居智能清扫机器人系统设计
家居智能清扫机器人系统设计本文设计了一台家居智能清扫机器人,详细阐述了系统的总体构成,硬件电路设计和软件程序设计方案。
该机器人能实现移动、垃圾清扫、自主避障等功能,能够在家庭、图书馆、展览馆等室内环境中进行清扫作业。
该智能清扫机器人的推广应用能够很大程度的提高工作效率,降低劳动成本。
标签:清扫机器人单片微型计算机传感系统随着计算机技术与人工智能技术的发展,智能家居已成为现在电子行业的热门话题,机器人的应用更是受到人们的关注。
服务型机器人已经渗透到了我们的生活、工作的各个领域,为了能够彻底的将人们从家居清洁工作中解放出来,深入研究清扫机器人这类服务型机器人变得越来越重要。
1清扫机器人的总体设计智能清扫机器人在室内环境下运动,实现清扫、避障、路径规划等功能,利用自身各个系统部件的调节与控制,尽可能遍历每一个角落,实现清扫的智能化。
机器人的时间记录功能可以实现定时清扫,在完成清扫之后自动回到起始点。
机器人将自身的感知功能和控制功能结合起来,实现路径的规划与避障等功能。
机器人的清扫功能较为完善,在运动的过程中,它将地面上的垃圾清扫到一起,集中拾取到垃圾箱内。
根据机器人功能需求分析,设计系统整体结构如图1所示。
[1]2清扫机器人硬件设计2.1控制核心模块设计。
清扫机器人的控制系统采用微控制器STC89C52作为核心,它能负责指令的接收与发送,控制电机的转向,完成清扫、避障等功能。
如图1所示,处理器与多个模块相连接,有红外避障传感器、超声波测距传感器、测速光电编码器、电机驱动器接口模块、状态显示器、无线通信接口等,这些模块在微控制器的控制下,互相协调工作,保证了清扫机器人各项功能的实现。
2.2车体结构设计。
为了满足机器人的性能要求,机器人的机械结构应该具有稳定性,运动灵活性和足够强度等特点,同时尺寸要小,容量要大,重量要轻。
清扫机器人的机械结构主要由外部躯壳、小车底盘、驱动轮、传感器、垃圾清扫模块等组成。
小车的外部躯壳和底盘采用铝合金框架,以增大其坚固性,减轻重量,传感器安装在小车的适当部位,用导线连接,使小车重心降低提高小车的稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网 http://www.qikan.com.cn
一种水面清洁机器人及其系统设计
作者:赵阳 赵飞 李依帆 王晨 陈津翟
来源:《科技风》2019年第32期
龙源期刊网 http://www.qikan.com.cn
摘 要:近年来,水面垃圾清理一直是一个热点。现有人工清理方式不仅效率低,而且存
在一定的危险性。鉴于此情况,设计一款水上垃圾清理机器人,以实现对水面垃圾的高效收集
是有必要的。该机器人可在水中自由移动收集水面垃圾,其工作所消耗的电能由其太阳能与常
规电池结合提供。搭载的视觉系统可采集水面环境信息。该机器人具有自主巡航和手动操作两
种模式,可在大面积水域内作业,完成垃圾的多点精准收集,保证高效率与精确性。
关键词:水面清洁;机器人;自主巡航;太阳能
一、设计目的
该设计的目的是为了实现水面垃圾清理工作的机械化与自动化,研制出一种具有环保、高
效、节能特点的水面垃圾清理机器人,该机器人可对水面漂浮物等垃圾的集拢收集、提升和储
运等,对营造绿色的生态环境有着重要的意义。通过使用机器人清理水面垃圾的方式,解决了
人工清理效率低、成本高、效果差等诸多问题。
龙源期刊网 http://www.qikan.com.cn
二、硬件系统介绍
该机器人硬件系统由控制系统、供能装置、运动机构、图像采集装置、浮力装置、垃圾收
集装置、排水装置构成,具体见图1。
(1)控制装置为机器人的功能控制核心,采用stm32f427芯片控制器作为主控,控制侧
身螺旋桨转动来使机器人在前后左右方向移动。此外,机器人在水中工作时可切换为手动控
制,也可自动控制。手动控制用于水面工作面积较小的环境,操作者通过遥控器对机器人进行
控制。自动控制时,该控制器外拓了GPS模块,可以实时检测该机器人在水中的速度、位
置、航向等状态。同时有开发的手机app可以对机器人进行控制。
(2)供能装置则采用太阳能与常规电池相结合的方式由一组蓄电池和多组太阳能电池板
构成,太阳能电池将光能转化为电能储存在蓄电池中,工作时蓄电池直接供能,供能稳定,节
约能源。
(3)运动机构由两组电机及水泵构成,一组电机安装在收集桶外壁上,带动螺旋桨转动
推动整个装置进行移动,另一组位于装置上部控制桶内水流产生旋涡,水泵则用来抽出桶内的
水,使形成液面差,外部垃圾得以随水流进入收集装置。
(4)图像采集装置利用广角摄像头采集水面环境信息以确定垃圾位置,内置控制系统可
控制机器人定点执行垃圾收集功能。同时机器人还可远程传输图像信号给操作者,操作者可通
过手机APP 检测水面环境,做出相应指示。
(5)浮力装置由三个浮箱及一系列机械连接装置构成,在工作状态下,可通过控制机械
结构的传动调整浮箱的高度状态来控制整个装置的上下运动,从而带动收集装置来避免垃圾外
泄。
(6)收集装置位于整个机器人的最下部,整体呈子弹头状,内有渐变螺纹,通过桶内螺
旋桨的转动,抽水泵抽出桶内液体形成液面差,进而在桶内形成漩涡,使垃圾垃圾顺着螺纹向
下到达收集装置底部。在收集装置底部安装有一层网,防止垃圾进入吸水管阻塞水泵。
(7)排水装置由抽水管、抽水泵、排水管组成了装置的水循环系统,垃圾随水流一起进
入垃圾收集装置,排水装置启动将桶内的水利用抽水泵排出,使得垃圾留在桶内,避免垃圾外
泄。
三、基本思路
将该机器人放入指定水域,广角摄像头可通过位于镜头上方的镜面圆锥反射采集到水面镜
像信息,确定垃圾所在位置,控制系统控制机器人到达垃圾所在区,进入垃圾收集模式,抽水
龙源期刊网 http://www.qikan.com.cn
泵启动,水流通过空心管由上部排水管排出,使此区域垃圾随水流流入垃圾桶内。桶内大螺旋
叶片旋转形成漩涡,使垃圾随水流进入桶底,桶壁设有螺旋槽可防止垃圾外泄,水泵持续工
作,内部回路通过上部管道将水排出,垃圾留在桶内。当此区域垃圾收集任务完成后,可控制
机器人提升垃圾收集桶,排出桶内的水并自动到达下一指定水域工作。当垃圾收集任务完成
后,可远程遥控器控制返航或一键自主返航至指定位置。由工作人员拆卸掉机器人的垃圾收集
桶。
四、创新特色
水面垃圾清理工作机械化、自动化是一种必然趋势。该水面清洁机器人的控制系统设计参
考了飞行器控制原理,可使用手机APP或遥控器操控,具有自主巡航功能。图像采集装置采
用广角摄像头配合上方的圆锥形反光装置采集到水面垃圾位置信息,然后控制机器人前往收
集。动力装置由太阳能板与常规电池结合可有效的延长机器人的续航时间。相信我们的此款水
面清洁机器人可以为我国的生态事业建设做出更多贡献。
參考文献:
[1]翟宇毅.一种水面清洁机器人控制系统的设计[A].中国电子学会电子机械工程分会.2011
年机械电子学学术会议论文集[C].中国电子学会电子机械工程分会:中国电子学会电子机械工
程分会,2011:4.
[2]朱盛颖,郭旭玲,邓彦松.一种涡旋式水面清洁机器人[J].兵工自动化,2018,37
(04):76-79.