空气动力学前六章知识要点
风力机空气动力学知识-64帧课件.ppt

5.风轮转速 当风力机额定功率和风轮直径确定后,增加风轮转速,可 以减小风轮转矩,即减少作用在风力机传动系统上的载荷和 降低齿轮箱的增速比。风轮转速增加后,在额定风速相同 时,叶片的弦长可以减小,使叶片挥舞力矩的脉动值减小, 有利于叶片的疲劳特性和机舱塔架的结构设计。
6.塔架高度 塔架高度是风力机设计时要考虑的一个重要参数。一般, H/D=0.8~1.2。
3.2风力机空气动力设计参数
1.叶片数 水平轴风力发电机组的风轮叶片一般是2片或3片,其中3 片占多数。 当风轮直径和风轮旋转速度相同时,对刚性轮毂来说,作 用在两叶片风轮的脉动载荷要大于三叶片风轮。另外,实际 运行时,两叶片风轮的旋转速度要大于三叶片风轮,因此, 在相同风轮直径时,由于作用在风轮上的脉动载荷引起的风 轮轴向力(推力)的周期变化要大一些。
力特性。当雷诺数较小时,前缘分离气泡的存在、发展 和破裂对雷诺数非常敏感;当雷诺数较大时,翼型最大 升力系数也相应增大。
3.4风力机叶片气动外形设计
风力机叶片气动外形设计的任务是根据风力机总体设计技 术指标,确定风力机叶片的几何外形,包括叶片扭角、弦长 和相对厚度沿展向的分布。对于变桨距叶片还要给出桨距中 心位置和桨距角随风速变化的规律。
在迎角不大时,前缘就发生层流分离,然后转捩为湍流后 再附着于翼型表面,在分离点与再附着点之间形成气泡,随 着迎角的增加,向后缘迅速扩展,到一定迎角时,变成完全 分离。
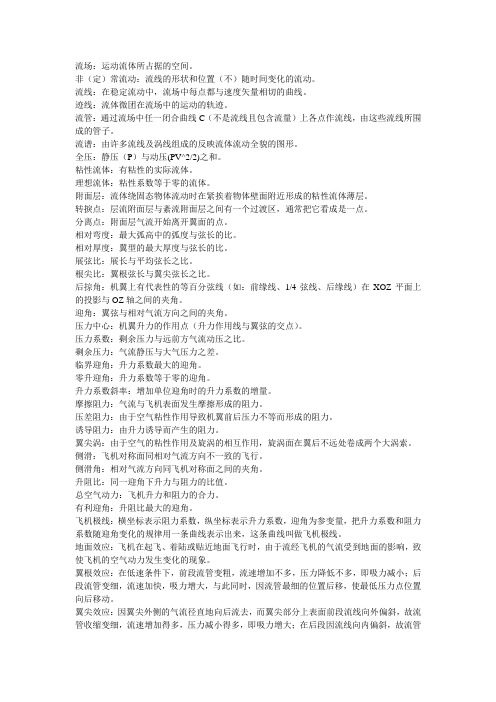
图3-2给出了翼型在不同分离形式时的升力特性。前缘分 离、后缘分离、薄翼分离如图所示。
需要指出的是:翼型边界层的分离一旦引起翼型失速后, 即使马上回复到失速前的迎角,翼型边界层也不会马山再 附,恢复到分离前的流动状态,这种现象称为流动迟滞现象。
根据风力机性能的需要,风力机翼型一般应要求在分离区 内有稳定的最大升力系数,有很大的升阻比,表面粗糙度对 翼型空气动力特性影响小等特性。
第一章-无人机空气动力学基本知识下

空气流场的基本概念
空气流动的基本规律
• 空气的相对性运动原理 • 运动的转换原理
空气流场的基本概念
• 流场的基本概念 • 定义
可流动的介质(水,油,气等)称为流体,流体 所占据的空间称为流场。
• 流场的描述 (1)流体微团:
空气的小分子群,空气分子间的自由行程与飞行 器相比较 太小,可忽略分子的运动
大气的粘性是空气在流动过程中表现出的一种 物理性质,大气的粘性力是相邻大气层之间相 互运动时产生的牵扯作用力,也叫做大气的内 摩擦力 。
大气的基本物理性质
大气的可压缩性
气体的可压缩性是指当气体的压强改变时其密 度和体积改变的性质。不同状态的物质可压缩 性也不同。液体对这种变化的反应很小,因此 一般认为液体是不可压缩的;而气体对这种变 化的反应很大,所以一般来讲气体是可压缩的 物质。
度、速度有关
压强
大气的压强是指物体的单位面积上所承受的 大气的法向作用力的大小。
大气的基本物理性质
大气温度
表征大气冷热程度的物理量,摄氏、开氏和 华氏温标。 TTkk=为T开c+2氏73温.1标5,,Tc为摄氏温标
大气密度
大气的密度指单位体积的空气的质量,即:
大气的基本物理性质
大气温度、密度及压力随高度的变化
空气流场的基本概念
• 流场的基本概念 • 流场的描述 (2)流线:
所有流体微团在同一时刻流动形成的轨线 流线不相交、流体微团不穿越流线(分子的 排斥性)
空气流场的基本概念
• 流场的基本概念 • 流场的描述 (3)迹线:
单个流体微团在一段时间内流动形成的轨 线 (4)定常流:
流场中各点的速度、加速度以及状态参数等 只是几何位置的函数,与时间无关 仅在定常流中,流线与迹线相同。
空气动力学考前知识精析
流场:运动流体所占据的空间。
非(定)常流动:流线的形状和位置(不)随时间变化的流动。
流线:在稳定流动中,流场中每点都与速度矢量相切的曲线。
迹线:流体微团在流场中的运动的轨迹。
流管:通过流场中任一闭合曲线C(不是流线且包含流量)上各点作流线,由这些流线所围成的管子。
流谱:由许多流线及涡线组成的反映流体流动全貌的图形。
全压:静压(P)与动压(PV^2/2)之和。
粘性流体:有粘性的实际流体。
理想流体:粘性系数等于零的流体。
附面层:流体绕固态物体流动时在紧挨着物体壁面附近形成的粘性流体薄层。
转捩点:层流附面层与紊流附面层之间有一个过渡区,通常把它看成是一点。
分离点:附面层气流开始离开翼面的点。
相对弯度:最大弧高中的弧度与弦长的比。
相对厚度:翼型的最大厚度与弦长的比。
展弦比:展长与平均弦长之比。
根尖比:翼根弦长与翼尖弦长之比。
后掠角:机翼上有代表性的等百分弦线(如:前缘线、1/4弦线、后缘线)在XOZ平面上的投影与OZ轴之间的夹角。
迎角:翼弦与相对气流方向之间的夹角。
压力中心:机翼升力的作用点(升力作用线与翼弦的交点)。
压力系数:剩余压力与远前方气流动压之比。
剩余压力:气流静压与大气压力之差。
临界迎角:升力系数最大的迎角。
零升迎角:升力系数等于零的迎角。
升力系数斜率:增加单位迎角时的升力系数的增量。
摩擦阻力:气流与飞机表面发生摩擦形成的阻力。
压差阻力:由于空气粘性作用导致机翼前后压力不等而形成的阻力。
诱导阻力:由升力诱导而产生的阻力。
翼尖涡:由于空气的粘性作用及旋涡的相互作用,旋涡面在翼后不远处卷成两个大涡索。
侧滑:飞机对称面同相对气流方向不一致的飞行。
侧滑角:相对气流方向同飞机对称面之间的夹角。
升阻比:同一迎角下升力与阻力的比值。
总空气动力:飞机升力和阻力的合力。
有利迎角:升阻比最大的迎角。
飞机极线:横坐标表示阻力系数,纵坐标表示升力系数,迎角为参变量,把升力系数和阻力系数随迎角变化的规律用一条曲线表示出来,这条曲线叫做飞机极线。
空气动力学基础知识

理论分析
数值计算
我国发展概述
风筝、火箭、竹蜻蜓、气球等 1934年、航空工程系 50、60年代航空工业崛起 70年代建立门类齐全的航空工业体系 改革开放后跨越发展
第一节 空气动力学的基本知识
一、流场
定义 可流动的介质(水,油,气等)称为流体,流体所占据的 空间称为流场。 流场的描述 流体流动的速度、加速度以及密度p、压强p、温度T(流体 的状态参数)等 — 几何位置与时间的函数 (1)流体微团: 空气的小分子群,空气分子间的自由行程与飞行器相比较 太小,可忽略分子的运动 (2)流线: 流体微团流动形成的轨线, 流线不相交、流体微团不穿越流线(分子的排斥性)
分类:
低速 亚声速 跨声速 超声速(高超) 稀薄气体空气动力学、气体热化学动力学、 电磁流体力学等 工业空气动力学
研究方法:
实验研究
风洞、水洞、激波管中进行的模型试验(相似原理) 飞行试验 优点:较真实、可靠 不足:不能完全、准确模拟、测量精度、人力、物理 流动现象=》物理模型=》基本方程=》求解=》分析、判断=》修 正 揭示内在规律,受数学发展水平限制、难满足复杂问题 近似计算方法(有限元) 经费少、但有时结果可靠性差
一、流场(续)
(3)流管: 多个流线形成流管 管内气体不会流出 管外气体也不会流入,不同的截面上,流量相同 (4)定常流: 流场中各点的速度、加速度以及状态参数等只是几何位 置的函数,与时间无关 (5)流动的相对性 物体静止,空气流动 相对速度相同时,流场中 空气动力相同 物体运动,空气静止
二、连续方程
ogyg y og
第一章-无人机空气动力学基本知识上
无人机空气动力学的基本概念
空气动力学的研究方法
• 实验研究方法 • 理依论靠分风析洞方、法激波管以及测试设备 进行模拟试飞条件进行飞行实验 • 数值计算方法
优点:结果较为真实、可靠 缺点:条件苛刻、成本高
无人机空气动力学的基本概念
空气动力学的研究方法
• 理论分析方法 运用基本物理定律,通过简化模型的 方法,建立数学方程求解解析解。 优点:成本比较低 缺点:很难得到工程上有价值的结果
大气的分层
3、中间层 中间层为离地球表面50~85km的一层。 4、电离层 从中间层顶界到离地平面800km之间的一层 称为电离层。带有很强的导电性,能吸收、 发射和折射无线电波。 5、散逸层
热层顶界以上为散逸层,它是地球大气的 最外层。
动时的空气动力学。 分为固定翼无人机动气动力学
和旋翼无人机动气动力学。
无人机空气动力学的基本概念
空气动力学的研究方法
• 基本理论——提高飞行性能 • 性能计算——无人机设计 • 飞行力学——无人机参数 • 飞行
大气层——地表被包裹着的一层很厚的大气 大气环境——飞行器在大气层内飞行时所处的
大气飞行环境的基本知识
大气的分层
2、平流层 平流层位于对流层的上面,其顶界约为 50km。在平流层大气主要是水平方向的流 动。随着高度的增加,起初气温基本保持 不变;20~32km以上,气温升高较快。平 流层的主要特点是空气沿铅垂方向的运动 较弱,因而气流比较平稳,能见度较好。
大气飞行环境的基本知识
无人机空气动力学的基本概念
空气动力学的研究方法
• 数值计算方法 利用计算机,通过近似计算方法,例如有 限元法、有限体积法,求得方程的数值解。 优缺点介于实验法和理论法之间。
空气动力学的基础知识

空气动力学的基础知识空气动力学是研究流体力学中与气体运动有关的力和运动的学科。
空气动力学的研究对象是运动的气体,其中包括飞行器、汽车、建筑物、船舶、火箭等物体在气体中的运动、流动和受力等问题。
本文将从空气动力学的基础知识入手,为读者介绍空气动力学的相关内容。
流场和速度场空气动力学研究的第一个问题是流体的流动。
流体的流动可以用流场和速度场来描述。
流场是指各点流体运动状态(流速、流速方向、密度、温度等)的分布情况。
速度场是指各点流体的流动速度。
流体的运动状态决定了它受力的状态,因此分析流场和速度场是空气动力学研究的第一步。
流场和速度场的计算方法以及它们之间的关系是空气动力学中的基础问题。
流体的连续性方程和动量守恒方程空气动力学中研究流体的运动过程需要遵循连续性方程和动量守恒定律。
连续性方程是描述流体运动过程的基本方程之一,它表述了流体在单位时间内通过任何一定横截面积内的物质流量相等。
动量守恒方程则描述了流体受力过程中的运动状态,这个方程能够反映物体在流体中穿过一个受力区域时所受的阻力、压力、力矩等信息。
空气动力学中的雷诺数在空气动力学中,雷诺数是一个非常重要的概念。
它是空气动力学中的无量纲参数,决定了流体的稳定性和不稳定性,可以用于描述边界层和湍流状态。
简而言之,当雷诺数越大时,流体会越容易变得湍流,这会对空气动力学的研究和设计带来许多影响。
翼型和飞行器翼型是空气动力学中的一个重要概念,它是描述飞行器机翼截面形状的函数。
翼形的设计对飞行器的性能有着至关重要的影响。
它能够影响到飞机的升力、阻力、抗扭稳定性、滚转和俯仰稳定性等方面。
因此,研究翼型的设计和性能是空气动力学研究的重要方向。
结语空气动力学是一门重要的学科,涉及众多的物理和数学知识。
通过本文的介绍,我们可以了解到空气动力学中的一些基础知识,例如流场和速度场、连续性方程和动量守恒方程、雷诺数、翼型和飞行器等。
对于空气动力学的学习者来说,深入了解这些基础知识对于学习和掌握这门学科是非常有帮助的。
空气动力学基础--空气动力学 ppt课件
PPT课件
7
体积流量
Q Av
质量流量
qm Av
PPT课件
8
2.2 流体流动的基本规律
2.2.1 连续方程
连续方程是质量守恒定律在流体定常流动中的应用。 连续方程:
1 A1v1 2 A2v2 3 A3v3 ...
2.3.2机身的几何形状和参数
为了减小阻力, 一般机身前部为圆头锥体, 后都为尖 削的锥体,中间较长的部分为等剖面柱体。
表示机身儿何形状特征的参数
机身长度Lah 最大当量直径Dah 长细比λah =Lah/Dah
PPT课件
23
2.4 作用在飞机上的空气动力
2.4.1 空气动力、升力和阻力 2.4.2 升力的产生 2.4.3 阻力 2.4.4 升力和阻力 2.4.5 升力系数曲线、阻力系数曲线和升阻比曲线、极
连续介质
组成介质的物质连成一片,内部没有任何空隙。
在其中任意取一个微团都可以看成是由无数分子组成 ,微团表现出来的特性体现了众多分子的共同特性。
微小的局部也可代表整体
PPT课件
5
2.1.3 流场、定常流和非定常流
流场
流体流动所占据的空间。
非定常流
在流扬中的任何一点处,如果流体做困流过时的流动多数随 时间变化,称为非定常流;这种流场被称为非定常流场。
曲线 2.4.6 机翼的压力中心和焦点(空气动力中心)
PPT课件
24
2.4.1 空气动力、升力和阻力
空气动力
空气作用在与之有相对运动物体上的 力称为空气动力。
飞机飞行时,作用在飞机各部件上 的空气动力的合力叫做飞机的总空 气动力, 用R 表示。
飞行中空气动力学理论知识讲解
飞行中空气动力学理论知识讲解一.概述某些因素会影响航空器的性能,如:大气、空气动力和航空器积冰等。
飞行员需正确理解这些因素,并以此为基础,较好地预测航空器对操纵动作的反应,尤其是在IFR 进近、等待以及在仪表气象条件(IMC)下减速时。
虽然这些因素对VFR 的飞行员来说也比较重要,但对于那些飞IFR 的飞行员则要求更为严格。
原因就是仪表飞行员是完全依赖仪表的显示来精确控制航空器的。
由此可见,如果飞行员要对航空器的操纵动作做出正确地判断,那么他必须首先具备扎实的空气动力学理论基础知识。
机翼为了更好地理解空气动力,飞行员需要弄明白一些与翼型相关的基础术语。
『图 2-1』为一典型翼型图。
翼弦是连接翼型前缘和后缘的一条直线,翼弦的长度(即从侧面来测量)称为弦长。
中弧线是一条由到上下翼面距离相等的点组成的弧线。
从机翼侧面看,中弧与翼弦在两端相交。
中弧线是很关键的,因为它与翼型的空气动力性能好坏直接相关。
而人们一般通过最大弧度(从弦线端点开始移动测量中弧和弦线对应点之间的距离)来有效地评估翼型的空气动力特性。
二.基础空气动力学回顾仪表飞行员不仅要深刻理解影响飞行中航空器性能的各种因素之间的关系及其不同点,还需弄清在外力变化和不同操纵情况下航空器是如何做出反应的。
为什么呢?因为一些仪表飞行环境中的固有危险是不会在目视飞行中出现的,也就是说只有仪表飞行员才会遇到这些问题。
要弄清楚如何解决这些问题,就必须提到作用在飞机上的四个力以及牛顿运动学第三定律。
『图 2-2』相对气流:相对于翼型来说气流的流动方向。
迎角(攻角):飞行轨迹或相对气流和翼弦之间的锐角。
飞行轨迹:航空器正在或将要沿其飞行的路线或轨迹。
四个力作用在飞行中的航空器上有四个基本的作用力『图2-3』分别是:升力、重力、推力、阻力。
升力升力是作用在翼型上的空气动力合力的一个分力,它的作用方向垂直于相对气流。
相对气流是相对于翼型的气流流动方向。
升力的作用点在平均压力中心(CP),常称作升力中心。
空气动力学的基本概念气动力升力和阻力等知识
空气动力学的基本概念气动力升力和阻力等知识空气动力学是研究物体在空气中运动时受到的力学影响的科学。
它不仅被广泛应用于航空航天领域,也涉及到了其他工程学科如汽车、建筑等。
本文将介绍空气动力学的基本概念以及气动力中的升力和阻力等知识。
一、空气动力学的基本概念空气动力学是力学中的一个重要分支,研究物体在空气中运动时所受到的力学影响。
它主要涉及到物体与空气之间的相互作用,通过数学和物理方法来分析物体受力的情况,从而达到控制和优化物体运动状态的目的。
二、气动力中的升力和阻力升力和阻力是空气动力学中两个重要的概念,它们对物体在空气中的运动起到至关重要的作用。
1. 升力升力是指垂直于物体运动方向向上的力。
对于飞行器来说,升力起到支持和提供升力的作用,使其能够在空中飞行。
升力的大小与物体的形状、攻角、速度以及空气密度等因素有关。
通常情况下,升力与攻角呈正比,与速度的平方呈正比。
2. 阻力阻力是指垂直于物体运动方向向后的力。
对于飞行器来说,阻力是其运动过程中必须克服的力,同时也会对飞行速度和效能造成影响。
阻力的大小与物体的形状、速度、表面粗糙度以及空气密度等因素有关。
通常情况下,阻力与速度的平方呈正比,与物体的形状和表面特征有关。
三、空气动力学的应用领域空气动力学作为一门重要的工程科学,被广泛应用于航空航天领域以及其他工程学科。
1. 航空航天领域在航空航天领域,空气动力学可以用来研究和分析飞机、火箭、导弹等飞行器的性能和运动状态,从而优化设计和改进飞行控制系统。
通过研究空气动力学,可以提高飞行器的安全性、稳定性和效率。
2. 汽车工程在汽车工程中,空气动力学的研究可以帮助改进汽车的空气动力性能,减小阻力,提高燃油效率和稳定性。
比如在车身外形设计上考虑空气动力学因素,可以降低风阻,提高汽车的行驶速度和燃油经济性。
3. 建筑工程在建筑工程领域,空气动力学的研究可以应用于高楼大厦、桥梁等建筑物的风载荷分析和抗风设计。
通过了解物体在风中的运动状态和受力情况,可以优化建筑物的结构设计,从而提高其抗风性能和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精品文档 . 空气动力学基础前六章总结 第一章 空气动力学一些引述 1、 空气动力学涉及到的物理量的定义及相应的单位 ①压强:是作用在单位面积上的正压力,该力是由于气体分子在单位时间内对面发生冲击(或穿过该面)而发生的动量变化,具有点属性。
0,limdAdAdFp 单位:Pa, kPa, MPa 一个标准大气压:101kPa ②密度:定义为单位体积内的质量,具有点属性。 0,limdvdv
dm
单位:kg/㎡ 空气密度:1.225Kg/㎡ ③温度:反应平均分子动能,在高速空气动力学中有重要作用。单位:℃ ④流速:当一个非常小的流体微元通过空间某任意一点的速度。单位:m/s
⑤剪切应力:dydv μ:黏性系数
⑥动压:212qv 2、 空气动力及力矩的定义、来源及计算方法 空气动力及力矩的来源只有两个: ①物体表面的压力分布 ②物体表面的剪应力分布。 气动力的描述有两种坐标系:风轴系(L,D)和体轴系(A,N)。力矩与所选的点有关系,抬头为正,低头为负。 cossinLNA , sincosDNA 3、 气动力系数的定义及其作用 气动力系数是比空气动力及力矩更基本且反映本质的无量纲系数,在三维中
的力系数与二维中有差别,如:升力系数SqLCL(3D),cqLcl'(2D) 精品文档 . LLCqS,DDCqS,NNCqS,AACqS,MMCqSl,pppCq,fCq 二维:S=C(1)=C 4、 压力中心的定义 压力中心,作用翼剖面上的空气动力,可简化为作用于弦上某参考点的升力L,阻力D或法向力N,轴向力A及绕该点的力矩M。如果绕参考点的力矩为零,则该点称为压力中心,显然压力中心就是总空气动力的作用点,气动力矩为0。 5、 什么是量纲分析,为什么要进行量纲分析,其理论依据,具体方法 在等式中,等号左边和等号右边各项的的量纲应相同,某些物理变量可以用一些基本量(质量,长度,时间等)来表达,据此有了量纲分析法,量纲分析可以减少方程独立变量个数,其理论依据是白金汉π定理。白金汉π定理:一个含有N个变量的等式,可以写成N-K个π积的函数形式,K表示用K个基本量纲来化简,每个非独立变量只出现在一个π积中,最终每个π积中K个量纲的幂指数分别等于0,方程得到化简。通过量纲分析法引出了雷诺数Re和马赫数M,这两个参数被称作相似参数。自由来流的马赫数Re=/cV=惯性力/黏性力,马赫数M=a/V,马赫数可以度量压缩性。 6、 流动相似 判断流动动力学相似的标准是: ①两流体的表面和所有固体边界是几何相似的 ②相似参数相同,即马赫数和雷诺数。 7、 流动问题的分类,判断标准,各有什么样的特点; (连续介质与自由分子;有粘无粘;可压不可压;根据马赫数的分类) 流动类型:当分子对物体表面的碰撞很频繁以致于物体不能分辨出单个分子碰撞(平均自由程很小),对物体表面而言流体是连续介质,这样的流动成为连续流动。如果流动中没有摩擦、热传导或者扩散,那么这样的流动被称为无黏流动。密度是常数的流动称作不可压缩流动(M<0.3)。 马赫数区域:如果流动中任意一点的马赫数都小于1,那么流动是亚音速的(M<0.8)。既有M<1的区域又有M>1的区域成为跨音速区域(0.8精品文档 . 的(M>1.2)。当M足够大(M>5),以至于黏性相互作用和/或者化学反应在流动中占首要地位,这样的流动称为高超声速流动。 8、 粘性及流动分离对气动力的影响(特别是典型构型); 大部分空气动力流动的理论分析都把远离物体的区域作为无黏流动来考虑,只将紧挨着物体表面的包含耗散效应的薄层区域作为黏性流动来考虑。紧挨物体的薄层黏性区域叫做边界层。流动从物面分离,急剧改变物面的压力分布,从而引起压差阻力的大幅增加。 9、 飞行器及其部件(特别是翼型)升、阻力、力矩气动特性 气动力系数在确定飞机性能和设计时是非常重要的工程指标。设计的目的是在获得必需的升力的同时产生尽可能小的阻力。 第二章 空气动力学基本原理和控制方程 1、 梯度,散度,斯托克斯定理 数量场的梯度,p的梯度p定义为这样的一个矢量: ①它的量值就是p在这个给定点单位空间长度上的变化率的最大值 ②它的方向就是p在这个给定点最大变化率的最方向。在笛卡尔坐标系中
p=p(x,y,z),则kzpjypixpp 矢量场的散度,固定质量的流体微元的单位体积的体积时间变化率等于速度矢量的散度,用V表示。在笛卡尔坐标系中V=V(x,y,z)=kVjViVzyx,则有散
度zyxzyxVVVV 矢量场的旋度,是速度矢量V的旋度的一半,V的旋度表示为V,在笛卡尔坐标系中V=V(x,y,z)=kVjViVzyx,则有
yVxVkxVzVjzVyViVVVzyx
kji
xyzxyz
zyxV
斯托克斯定理如下 精品文档 . csdsds)A(A
散度定理如下 ()svAdsAdV••ÒÓ
梯度定理如下 svPdsPdVÒÓ
2、 描述流体的模型 ①有限控制体模型 ②无限小流体微元模型 ③分子模型 3、 速度散度的数学描述及物理含义 速度散度的数学描述及物理含义:DtVDV)(1V, 该式表明速度矢量的散度在物理上代表了一个运动的流体微元单位体积的体积时间变化率。 4、 流动的基本控制方程的理论依据(三大守恒定律),推导过程要了解,特别是要掌握方程中每一项数学表达式中的物理含义 ①连续方程,把质量守恒的物理原理应用到固定于空间的有限体积控制体的最终结果。
积分形式:sVvdsdVtÒÓ 流出控制体净质量流量=V内质量减少量
微分形式:()0vt
g
②动量方程,流体的动量随时间的变化率与流体所受的体积力和表面力的和是相等的。
积分形式:()viscousVssVvdVvdsvPdsfdVFt乙佑
微分形式:()(F)xxviscousuPuvftxg
欧拉方程(无黏流): ()Puvxg,()Pvvyg,()Pwvzg
N-S方程(有黏流):()(F)xxviscousuPuvftxg 精品文档 . ()(F)yyviscousvPvvftyg
()(F)zzviscouswPwvftzg
③能量守恒,能量守恒的数学表示形式就是能量方程。 5、 实质导数,定义及所描述的物理含义 实质导数:DtD/是表示当一个流体微元运动通过点1时它的密度的瞬时时间变化率的符号。按定义,这个符号叫做实质导数(或物质导数,随体导数) 物理意义:流体单元的跟随时间变化率。 ()DvDttg=当地导数+迁移导数
密度的实质导数:DuvwDttxyz 6、 迹线,流线,染色线的定义,区别与联系 迹线,当微元A从点1开始向下游运动时,它的运动路径定义为微元的迹线。流线,是这样的一种曲线,其上任意一点的切向皆为这一点的速度方向。染色线,连接流体微团的线。定常流动,三条线相同,只有非定常才不相同。 7、 流体微元(团)的旋转角速度,旋度(涡量),变形(应变率)的定义及描述
流体微元(团)的旋转角速度为kyuxvjxzuizvy21 速度矢量的旋度(涡量)为V 变形(应变率)为yuxvxy,zvyyz,xzuzx 8、 环量、流函数、速度势的定义。流函数与速度势的区别与联系 速度环量:cdsV-(流体旋度的总效应)
流函数为cyx),( 速度势V 对于一个标量函数,流动的速度可由的梯度给出。我们称为速度势。精品文档 . 流函数的存在是根据二维不可压缩流动的连续方程得来的,而连续方程总是成立的,所以凡是二维不可压缩流动,流函数必定存在。流函数给出了流线的表达式。等势线的梯度线为流线。 第三章 无粘不可压缩流动 1、 伯努利方程的推导,成立的条件及应用 伯努利方程:222211V21V21pp ,212constVp along a streamline
,212constVp through the flow(对于无旋流)
欧拉方程:dpVdV 成立条件: (a)仅适用于无黏不可压缩流动 (b)有旋流动中沿着一条流线成立 (c)无旋流动中在任意点处成立 (d)忽略体积力,并假设流动是定常的 应用:文德利管,低速风洞,空速管 2、 压强系数定义及应用
压强系数为qppCp
对于不可压缩流动,pC可以只用速度来表示,21VVCp 3、 无旋不可压流动的控制方程--拉普拉斯方程,主要是推导依据和成立条件 (1) 针对速度要满足的条件:一是散度为零(怎么来的?在什么样的条件下,速度散度才能为零),二是旋度为零。 (2) 速度所要满足的边界条件。 无旋不可压缩流动的控制方程(拉普拉斯方程):02 (1)不可压缩流动的速度条件是速度的散度为0,无旋流动速度旋度为0。 (2)速度的边界条件:①无穷远处边界条件②物面边界条件。 4、 四个基本流动;包括公式中出现的每一项的指代含义,例如偶极子中的强度