橡胶履带轮履带周长建模与试验
橡胶履带车辆行走系统的动力学模型及脱轮问题仿真分析
t
a
a
a
t
n
、,
t
n
、 t
a
a
n
、
n
2
、 t
a
n
m bn Ia ) ( +。 tn +2 ( 。+0 tn s ^一 2 m b da ) ]
维普资讯
第2 7卷 第 6期 20 0 6年 1 2月
河 南 科 技 大 学 学 报 :自 然 科 学 版
Jun lo n n Unv ri fS in e a dT c n lg : trlS in e o r a fHe a iest o ce c n e h oo y Naua ce c y
(1 . 河南科技 大学 车辆 与动力 -程学 院 , l - 河南 洛 阳 4 10 ;2中国一拖股份 有限公司 , 703 . 河南 洛阳 4 10 ) 7 0 0
摘要 : 橡胶履带在高速行驶中的脱轮容易导致行走系统部件 的损坏和人身 财产损失 。本文在分析履带车辆行 走 系统 工作 原理 的基础上 , 考虑了履带车辆的主要结构 , 建立 了针对其 高速行驶 中脱 轮问题 的行走 系统动力 学模型 , 分析了第一支重轮垂向位移与行走系统结构参数 以及地 面激励 的联 系 , 并针对 某型履带 车辆 的行走 系统进行 了计算机仿真和分析 。结果表 明所建立 的动力学模 型是 可行的 , 本文方法可为履带车辆行走 系统设
参考 。
, 对于行 走 系统结 构参 数 和脱 轮 问题 的动 力 学分 析 还 有 待 研 究 。本 文在 分 析 履带 行走 系 而
统结构 的基 础上 , 建立 了关 于履 带脱 轮 问题 的 动力 学模 型 , 进行 了仿 真 计 算 , 行走 系统 设计 提 供 了 并 为
履带车辆动力学建模及模型试验验证

履带车辆动力学建模及模型试验验证谢欢;王红岩;郝丙飞;王钦龙【摘要】为研究履带车辆的动力学性能,须建立准确的车辆模型.对履带车辆进行了拓扑结构分析,基于RecurDyn环境建立了履带车辆多体动力学模型,采用谐波叠加法对随机路面进行数字化模拟,并通过三维等效容积法建立了三维仿真路面模型.为验证多体动力学模型的可信性,进行了典型障碍和随机道路实车试验,比较了测点处加速度时间历程变化和功率谱估计曲线.结果表明:建立的动力学模型能够较好地反映实车的高频和低频振动特性,为履带车辆的动力学研究提供了模型基础.【期刊名称】《农业装备与车辆工程》【年(卷),期】2018(056)006【总页数】5页(P44-48)【关键词】履带车辆;动力学模型;实车试验;模型验证【作者】谢欢;王红岩;郝丙飞;王钦龙【作者单位】100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院;100072北京市陆军装甲兵学院【正文语种】中文【中图分类】TJ8110 引言目前,基于多体动力学方法的虚拟样机技术为履带车辆模型的仿真研究提供了很好的方法途径[1-2]。
进行装甲车辆性能的仿真分析,首先要建立准确的车辆动力学模型,国内许多研究者对此开展了许多卓有成效的工作。
武云鹏[3]使用ATV工具箱在ADAMS环境中建立了履带车辆悬挂系统动力学模型,研究了履带车辆悬挂系统的动力学性能。
韩宝坤[4]等建立了履带车辆基于平稳性能的动力学模型,并与DADS环境下的动力学模型进行了比较,验证了模型的合理性。
王克运[5]等为研究履带车辆越障过程中的动力学性能,建立了其动力学模型,在MATLAB/Simulink环境中对模型进行了仿真。
陈媛媛[6]利用三维建模软件Pro/E和多体动力学软件RecurDyn建立了履带车辆动力学模型,在不同的工况下,研究了履带张紧装置对车辆的机动性和平顺性的影响。
本文以某型履带车辆为研究对象,基于多体动力学软件RecurDyn环境建立履带车辆多刚体系统动力学模型,并通过实车试验对所建履带车辆模型进行验证,为下一步履带车辆动力学性能仿真分析提供较准确的模型。
P072-履带车辆多体动力学仿真与试验验证

( x0 , y0 , z0 )T 和车身联体坐标系相对固定 ( 0 , 0 , 0 )T 。 一旦通过动力学方程
-1图 1 履带车辆整车多体动力学模型
系转动的欧拉角 0
2006 年 MSC.Software 中国用户论文集
0 和 求得 r0 , r r 0 以及 0 , 0 和 0 ,便可据此计算出车身上任意一点的位移、速度和加速度。
2006 年 MSC.Software 中国用户论文集
履带车辆多体动力学仿真分析与试验验证 MULTI-BODY DYNAMIC SIMULATION AND EXPERIMENTAL VALIDATION OF HIGH-SPEED TRACKED VEHICLE
芮强 王红岩 (北京装甲兵工程学院)
-3-
2.1 悬挂系统模型的建立 履带车辆的悬挂系统是指连接车体和推进系统的所有零部件的总称,主要包括弹性元件、阻尼元件、 限制器以及导向装置等。ADAMS 软件提供了平动弹簧阻尼驱动器(TSDA)和转动弹簧阻尼驱动器(RSDA) 等力单元来模拟各种不同结构形式的悬挂系统。 虽然扭杆弹簧本身刚度是线性的, 但是由于有导向机构 (平 衡肘)的缘故,整车的悬挂刚度是非线性的。 2.2 行驶系统模型的建立 行驶系由履带、负重轮、主动轮和诱导轮构成。负重轮通过履带及履带自身与地面接触承受地面的作 用力。这种力是履带车辆地面力学区别于其它车辆的重要特征。在整个行驶系中,履带直接与地面接触并 承受地面接触力,负重轮则通过履带间接承受地面接触力。 2.2.1 负重轮和履带、地面之间的作用力 考虑地面与履带、履带与负重轮间的相互约束关系,建立了负重轮、履带及地面之间相互作用模型。 地面对履带同时施加法向力和切向力,履带将这些力传递给负重轮。本论文中为了简化问题需要,我们假 设地面为硬地面。 履带和地面接触时, 地面对履带的反作用力分解为法向分量 P 和切向分量 S , 我们假设法向分量 P 可 以表示成沉陷量和沉陷速度的函数,切向分量 S 可以表示成法向分量和履带滑移速度的函数:
履带车辆系统建模设计方案

履带车辆系统建模设计方案1. 引言履带车辆是一种特殊类型的车辆,具有优异的越野性能和载重能力,广泛应用于工程、军事、矿山等领域。
履带车辆系统作为履带车辆的核心部件,其安全性、可靠性和性能直接影响履带车辆的使用效果和寿命。
因此,本文将针对履带车辆系统进行建模设计,以提高其性能和可靠性。
2. 建模设计流程在进行履带车辆系统建模设计的过程中,我们可以采用以下的流程:2.1 确定系统需求首先,我们需要明确履带车辆的使用场景和用户需求,例如:越野性能、载重能力、行驶速度、操控性能等。
同时,也需要考虑到履带车辆使用过程中可能面临的突发情况,如车辆被卡住、爬坡、越垄等情况,以便在系统设计中做出合理的考虑。
2.2 构建系统模型其次,我们需要根据系统需求构建模型,包括履带车辆的结构模型、功能模型、数据模型、行为模型和性能模型等。
其中,结构模型主要反映履带车辆组成部分的几何、材料和结构特征,功能模型主要描述组成部分之间的功能关系,数据模型主要描述履带车辆的数据特征和数据结构,行为模型主要描述履带车辆在不同条件下的行为表现,性能模型主要描述履带车辆的性能指标。
2.3 进行仿真验证在模型构建完成之后,我们需要进行仿真验证,以验证模型是否符合系统需求和性能指标,同时也可以通过仿真验证来找出模型中可能存在的问题和缺陷,进一步改进系统设计。
2.4 系统实现最后,我们需要进行系统实现,将模型转化为可运行的程序代码或者硬件电路,并对其进行软硬件优化,以达到最佳的性能和稳定性。
3. 模型建设方法在进行履带车辆系统建模设计的过程中,我们可以采用以下的方法:3.1 系统分解首先,我们需要对履带车辆系统进行分解,将其分为多个组成模型,包括充能系统、传动系统、行走系统、悬挂系统等。
通过系统分解,可以使系统的结构更加清晰明了,便于进行进一步的建模设计。
3.2 设计模式在进行履带车辆系统建模设计的过程中,我们可以采用多种设计模式,如代理模式、工厂模式、单例模式等。
履带底盘及驱动系统建模与仿真
湖南农业大学车辆工程专业毕业设计履带底盘及驱动系统建模与仿真Modeling and Simulation of tracked chassis and drive system学生姓名:刘延韬学号:201240670127年级专业及班级:2012级车辆工程(1)班指导老师及职称:李军政教授学院:工学院湖南·长沙提交日期:2016年5月湖南农业大学全日制普通本科生毕业论文诚信声明本人郑重声明:所呈交的本科毕业论文是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。
本人完全意识到本声明的法律结果由本人承担。
毕业论文作者签名:年月日履带底盘及驱动系统建模与仿真学生:刘延韬指导老师:李军政(湖南农业大学工学院,长沙 410128)摘要:此设计以电脑仿真技术并结合履带底盘及驱动系统的三维模型构建履带行驶系统虚拟实验平台,对坦克车与水底行走车辆的履带行驶系统进行建模,并对其直线行驶性能,爬坡越障性能与转向性能进行软件仿真,对结果进行分析和总结。
此过程中使用了计算机三维图形设计的理论知识、三维建模技术和仿真技术(主要使用软件:pro/E、recurdyn),实现了三维模型建立与仿真分析。
关键词:三维建模;多体运动仿真分析;履带行驶系统建模与仿真;目录履带底盘及驱动系统建模与仿真 (1)前言 (5)1坦克履带车身三维模型制作 (8)1.1使用Pro/E建立坦克履带车车身 (8)装配炮塔与车身 (9)1.2使用recurdyn对履带部分建模 (10)1.2.1创建履带板与驱动轮 (10)1.2.2创建履带行走机构 (12)1.3履带子系统仿真 (14)1.4地面参数的设定 (15)2水底行走履带车建模 (17)3坦克履带车辆仿真分析 (21)3.1坦克履带车软质与硬质地面过坡承重轮受力分析 (21)3.2坦克履带车辆单边转向分析 (22)3.3坦克履带车辆原地转向仿真分析 (23)3.4坦克履带车辆扭矩悬挂仿真 (25)4水底行走履带车仿真分析 (27)4.1直线行走仿真分析 (27)4.2转向行走仿真分析 (29)4.3水底行走履带车爬坡,越沟行走仿真分析 (30)4.4水底行走履带车履带增设悬挂系统 (32)5总结 (34)6书目 (36)前言虚拟现实技术是基于近年来的物体几何建模技术、特征、菜单交互、并行处理、智能化多体系统仿真技术的产物。
拖拉机橡胶钢筋履带弯曲刚度计算方法与试验验证
第22卷第9期2006年9月农业工程学报TransactionsoftheCSAEVol.22 No.9Sep. 2006
拖拉机橡胶钢筋履带弯曲刚度计算方法与试验验证娄 云1,赵卫兵2,刘庆庭3,武良臣4(1.河南机电高等专科学校机械工程系,新乡453002; 2.安阳工学院机械工程系,安阳455000;3.华南农业大学工程学院,广州510642; 4.河南理工大学,焦作454000)
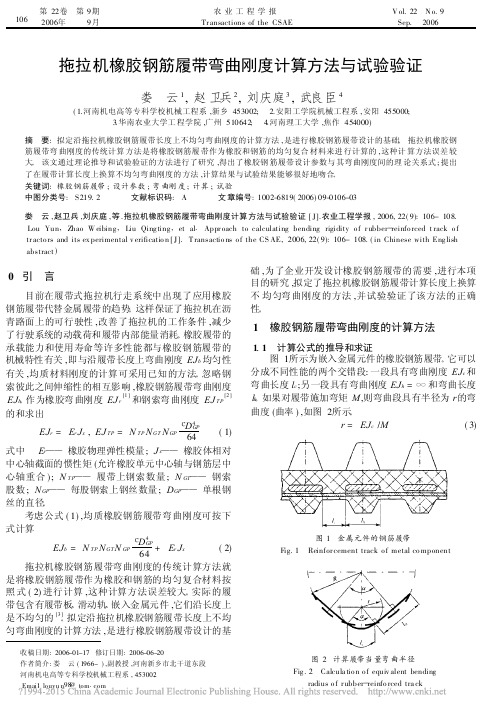
摘 要:拟定沿拖拉机橡胶钢筋履带长度上不均匀弯曲刚度的计算方法,是进行橡胶钢筋履带设计的基础。拖拉机橡胶钢筋履带弯曲刚度的传统计算方法是将橡胶钢筋履带作为橡胶和钢筋的均匀复合材料来进行计算的,这种计算方法误差较大。该文通过理论推导和试验验证的方法进行了研究,得出了橡胶钢筋履带设计参数与其弯曲刚度间的理论关系式;提出了在履带计算长度上换算不均匀弯曲刚度的方法,计算结果与试验结果能够很好地吻合。关键词:橡胶钢筋履带;设计参数;弯曲刚度;计算;试验中图分类号:S219.2 文献标识码:A 文章编号:1002-6819(2006)09-0106-03
娄 云,赵卫兵,刘庆庭,等.拖拉机橡胶钢筋履带弯曲刚度计算方法与试验验证[J].农业工程学报,2006,22(9):106-108.LouYun,ZhaoWeibing,LiuQingting,etal.Approachtocalculatingbendingrigidityofrubber-reinforcedtrackoftractorsanditsexperimentalverification[J].TransactionsoftheCSAE,2006,22(9):106-108.(inChinesewithEnglishabstract)
收稿日期:2006-01-17 修订日期:2006-06-20作者简介:娄 云(1966-),副教授,河南新乡市北干道东段河南机电高等专科学校机械工程系,453002。Email:louyun98@tom.com
橡胶履带寿命标准
橡胶履带寿命标准一、材料选择橡胶履带是由橡胶和纤维骨架材料制成的带状制品。
橡胶材料应选择高弹性、高耐磨性、耐油性、耐老化性能好的材料。
纤维骨架材料应选择高强度、高刚性的材料。
同时,根据使用环境和负载要求,还应在橡胶材料中添加适量的硫化剂、促进剂、补强剂等助剂。
二、结构设计橡胶履带的设计应考虑其与整机动态特性相匹配,同时还应满足承载能力和使用寿命的要求。
带厚、带齿形状和深度应根据不同使用场合进行设计。
同时,为提高使用寿命,应尽量减小带齿的磨损。
三、制造工艺制造橡胶履带时,应严格控制原材料的配方比例、混炼胶的硫化特性、纤维骨架材料的铺设方向和带胚成型压力等工艺参数。
此外,在制造过程中还应进行严格的外观检查和尺寸测量,确保产品质量符合要求。
四、负载承受能力橡胶履带的负载承受能力取决于其结构形式、材料性能和制造工艺等因素。
为确保其使用寿命,应确保橡胶履带的负载承受能力不低于额定值,并留有一定的安全余量。
五、使用环境条件橡胶履带的使用环境条件对其使用寿命有很大影响。
例如,高温会使橡胶加速老化,而低温则会使橡胶变硬、变脆。
因此,在使用过程中应考虑环境温度和湿度等因素,并采取相应的防护措施。
六、摩擦系数橡胶履带的摩擦系数对其使用寿命有很大影响。
摩擦系数过低会导致打滑,摩擦系数过高则会导致磨损加剧。
因此,应根据使用场合选择合适的摩擦系数,并定期进行检查和维护。
七、安装维护要求为确保橡胶履带的使用寿命,应正确安装和维护。
例如,安装时应确保带齿与传动轮相匹配,并留有一定的调整余量;在使用过程中应定期检查带齿磨损情况,并及时更换损坏的带齿;在维护时应注意避免锐利边缘或硬物刮伤橡胶履带等。
八、使用时长和磨损度橡胶履带的使用时长和磨损度取决于其材料性能、结构设计、制造工艺和使用环境条件等因素。
一般来说,按照上述要求进行使用和维护,其使用寿命可达到数千小时以上。
在使用过程中应定期检查橡胶履带的磨损情况,并及时更换损坏的带齿等部件。
橡胶履带规格参数
橡胶履带是一种用于履带式机械设备的重要部件,它具有耐磨、抗老化、抗拉伸、耐温、抗腐蚀等特点。
橡胶履带的规格参数包括履带宽度、履带厚度、履带链节数、履带间距等,这些参数直接影响着履带的性能和适用范围。
首先,履带宽度是橡胶履带的重要参数之一。
这个参数决定了履带可以提供的接地面积,直接影响着机械设备的牵引力和稳定性。
一般来说,履带宽度越大,接地面积越大,牵引力越强,稳定性越好。
但是过大的履带宽度会增加机械设备的重量和功耗,降低机动性能。
因此,需要根据具体的工作环境和机械设备的需求选择适当的履带宽度。
其次,履带厚度是橡胶履带的另一个重要参数。
履带厚度影响着履带的使用寿命和耐磨性能。
一般来说,履带厚度越大,耐磨性越好,使用寿命越长。
但是过大的履带厚度会增加机械设备的重量和摩擦阻力,降低运动效率。
因此,在选择履带厚度时,需要综合考虑耐磨性能和运动效率的平衡。
履带链节数是橡胶履带的另一个关键参数。
链节数决定了履带的柔韧性和适应性。
一般来说,链节数越多,履带的柔韧性越好,可以更好地适应地形不平坦的工作环境。
但是过多的链节会增加履带的重量,降低机械设备的牵引力和运动效率。
因此,在选择履带链节数时,需要根据具体的工作环境和机械设备的需求进行权衡。
履带间距是橡胶履带的另一个重要参数。
间距决定了履带链节之间的距离,影响着履带的抗滑性能和牵引力。
一般来说,间距越大,履带的抗滑性能越好,但是牵引力会降低;间距越小,牵引力越大,但是抗滑性能会降低。
因此,在选择履带间距时,需要综合考虑防滑性能和牵引力的平衡。
综上所述,橡胶履带的规格参数包括履带宽度、履带厚度、履带链节数、履带间距等,在选择和使用橡胶履带时,需要根据具体的工作环境和机械设备的需求进行合理的选择。
这些规格参数的合理配置,能够有效提升机械设备的性能和工作效率,延长履带的使用寿命,降低维修成本,提高整体经济效益。
橡胶履带车辆行走系统的动力学模型及脱轮问题仿真分析
14
河南科技大学学报: 自然科学版
2 006 年
2 悬架系统的作用力
油气悬架的刚度和阻尼不是定值, 这里将其等效为一定值。因此油气悬架系统对支重轮的作用力 表示为
Fi1 = k1 yi1 + c1 yi1 ( i = 1 ~ 2, j = 1)
Fi2 = k2 yi2 + c2 yi2 ( i = 3 ~ 4, j = 2)
i= 1
i= 3
2
2 F i1 ( bt1 + at1 tan
i= 1
i-
at1
si ai
s in cos
i i
)
+
4
2 F i2 ( bt2 + at2 tan
i= 3
i-
at2
si ai
s in cos
i i
)
+
2F 53 ( bt3 +
at3 tan
5-
at3
s5 a5
s in cos
5 5
)
=
0
( 2)
图 1 履带车辆模型
支重轮垂直运动方程
mw i ( 1 + tan2 i ) yw i - mw i tan2 iyh + mw i ( bt1 + at1 tan i ) tan i h = mwi g +
F i1
si sim ai co s
i i
+
Fti
+
T
i
+
T
r i
( i = 1 ~ 2, j = 1)
走系统工作原理的基础上, 考虑了履带车辆的主要结构, 建立了针 对其高速行 驶中脱轮 问题的行走 系统动 力
橡胶履带生产工艺
橡胶履带生产工艺橡胶履带是一种用于履带式车辆的重要零部件,它能够提供牢固耐用的运输功能。
橡胶履带的生产工艺主要包括原材料准备、橡胶混炼、层叠、硫化和后处理等几个环节。
首先,原材料准备是橡胶履带生产的第一步。
主要原材料包括橡胶、纤维材料(如尼龙布)、卷扣材料(如钢丝)等。
原材料需要经过定量称重、配料混合等过程,确保原材料的配比准确。
接下来,橡胶混炼是将配比好的原材料进行混合的过程。
在橡胶混炼过程中,首先将橡胶放入密炼机中进行破碎和预热。
然后,根据配方加入纤维材料和卷扣材料,搅拌混合,使原料分子均匀地混合在一起。
最后,将混合好的胶料经过冷却剂降温,使其凝固成为固体胶条。
层叠是橡胶履带生产的核心环节之一。
在层叠过程中,将经过混炼的橡胶胶条分层放置在预先制作好的层叠模具上。
每一层都需要保证胶条的平整和紧密贴合,以确保最后的履带质量。
硫化是橡胶履带生产的重要工艺环节。
硫化是指将已经层叠好的橡胶胶条放入硫化机中进行加热处理,使其发生化学反应,从而形成稳定的橡胶组织结构。
硫化过程中,需要控制好温度和时间,使橡胶履带充分硫化,提高其硬度和耐磨性。
最后,橡胶履带还需要进行后处理。
后处理主要包括修整边缘、清洗和质量检验等。
修整边缘是为了保证橡胶履带的外观整洁和尺寸准确。
清洗是为了去除履带表面的污垢和异物,保持其清洁。
质量检验是对橡胶履带进行抗拉强度、耐磨性等性能的检测,确保履带的质量符合标准要求。
以上就是橡胶履带的生产工艺。
通过以上几个环节的严格控制,可以获得质量可靠的橡胶履带,为履带式车辆的运输提供稳定的支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
橡胶履带轮履带周长建模与试验吕凯;穆希辉;郭浩亮;薛文斌;汪志远;许林【摘要】橡胶履带轮用于更换轮式车辆的轮胎,以提高其越野性能.为避免脱带和履带过度拉伸,使履带周长与轮系相匹配,提出了一种基于轮系中各轮相对位置变化的橡胶履带周长建模方法.在多种地形条件下,使用多相机视频测量系统对轮系中各轮上标记点进行追踪,利用采集到的标记点坐标重构各轮轴线,并进一步采用该方法重建履带周长.在平整钢板上的试验结果表明,由于履带弯曲刚度不均匀,构建的履带平均周长为3 791.62 mm,标准差为3.51 mm,比履带实际周长3 812 mm略小,且略有波动.根据在多种地形条件下的测量结果构建的履带周长,其标准差与平整钢板上一致,均为3.5 mm左右.平均值在3 787.78 ~3 794.75 mm之间,基本与平整钢板上的履带平均周长一致.因此,橡胶履带周长建模方法能够在多种地形条件下评估履带周长,为履带轮设计提供依据.【期刊名称】《农业机械学报》【年(卷),期】2016(047)011【总页数】12页(P329-340)【关键词】履带车辆;橡胶履带轮;履带周长;数学模型;视频测量【作者】吕凯;穆希辉;郭浩亮;薛文斌;汪志远;许林【作者单位】军械技术研究所,石家庄050003;军械技术研究所,石家庄050003;军械技术研究所,石家庄050003;军事交通学院国家应急交通运输装备工程技术研究中心,天津300161;军事交通学院国家应急交通运输装备工程技术研究中心,天津300161;泸州长起特种起重设备有限公司,泸州646000【正文语种】中文【中图分类】U469.6+94橡胶履带轮能在不改装轮式车辆的条件下,与轮胎互换,提升车辆的越野能力。
该项技术已广泛使用在北美、欧洲等地区的农用车辆和工程车辆上。
其代表公司有美国Goodyear、Mattracks、CaseIH,加拿大Soucy、Camso,日本Bridgestone,英国Versatracks等。
橡胶履带轮一般使用三角形构型,驱动轮处于三角形的顶点上,与橡胶履带的驱动角相啮合驱动履带;框架维持履带轮的结构;导向轮处于三角形底部的一端或者两端;负重轮处于三角形的底部,铰接安装在相关组件上,这些组件与负重轮构成负重轮系,负重轮系安装在框架上。
除橡胶履带外履带轮的其他组件组成轮系。
为提高平顺性和牵引性能,轮系中的负重轮会随着地形变化而摆动,这会使履带周长发生变化。
由于履带松弛会诱发脱带[1],绷紧又会增加履带张紧力,加剧履带轮组件的磨损[2]。
因此,履带周长应当尽可能不变,以维持履带张紧力恒定,并提高橡胶履带的使用寿命。
准确评估橡胶履带轮在多地形上行驶时履带周长的变化,是解决上述问题的关键。
为此,本文提出橡胶履带周长建模方法,并分析该方法中的障碍不确定性对履带周长建模的影响。
进一步使用该方法匹配张紧装置相关参数和负重轮的摆动幅度,以使轮系能够保持履带周长不变。
最后采用多相机视频测量系统,对比平整钢板和多种地形上行驶时履带周长的测量重建结果,以验证橡胶履带周长建模方法的正确性。
橡胶履带接地部分可分为接触部分和变形部分。
接触部分与负重轮的外表面贴合,变形部分在地形作用下产生变形。
在软地形上,如橡胶履带为完全刚性,则橡胶履带的接地部分应为直线[3-4],若为完全柔性,则接触部分为包络负重轮的圆弧,而变形部分为负重轮的水平切线[5]。
但事实上,橡胶履带是有限刚度的,因此变形部分应为曲线,且与相邻的接触部分相切[6-7]。
确定变形部分曲线形状的方法主要有两种:将履带离散为多个单元,并考虑土壤压力和沉降的关系、土壤与履带之间的剪切力以及履带张紧力和伸长率等要素,综合上述要素的力学分析结果可得到较为贴合实际的曲线形状[8-10];考虑土壤压力和沉降关系时将变形部分简单等效为圆弧[11-13]。
但以上方法并不适用于在橡胶履带轮方案设计中分析履带周长变化:上述方法采用的地形参数单一,而履带轮的工作地形多种多样,且不一定为均质土壤,即便是在同一地域内,土壤参数还受到气候条件的影响;上述方法均未考虑负重轮摆动,且难以构建出足够复杂的地形条件[14],以实现负重轮在其摆动范围内的充分摆动。
因此,本文提出一种履带周长变化的评估方法,该方法认为履带周长变化与负重轮上下摆动相关,而负重轮上下摆动与地形相关。
在装配后,橡胶履带具有一定的预张紧力,同时其许用伸长率一般在1%以下,因而邻近负重轮之间若不存在障碍,则该变形部分的曲率很小,可近似为直线。
若邻近负重轮之间存在凸起障碍,则变形部分会产生较大曲率,同时引起邻近负重轮摆动,此时的变形以圆弧来模拟,并通过与邻近的接触部分相切的条件确定其半径。
此外,橡胶履带轮由于采用三角形的紧凑结构,不同于整体式橡胶履带系统和其它四轮一带系统。
传统的四轮一带系统上部履带,即在托轮两侧的履带,由于跨度大,且水平延伸,受重力影响大,其形状需要使用悬链方程[15-16]或二次多项式[17-18]等方法来近似。
而橡胶履带轮上部履带,即驱动轮两侧和导向轮两侧的履带,均为向下延伸,跨度小,且橡胶履带的质量小,在张紧力作用下,驱动轮两侧和导向轮两侧的橡胶履带均为直线形状。
基于上述原则,还需判断橡胶履带接地部分是否遇到凸起障碍以及该障碍所处位置。
以相邻的左、中、右3个负重轮为例说明:当中部负重轮外圆周部分或者全部处于左右负重轮下部公切线的下方时,此时中部负重轮下陷,左右负重轮与其之间的两个变形部分均能以直线段近似,且两线段无交点,如图1a所示;当中部负重轮外圆周均处于左右负重轮下部公切线的上方时,若仍将两个变形部分以线段表示,则两线段在中部负重轮下方出现交叉。
此时这些负重轮之间出现了凸起障碍。
假设障碍处于左右较高位置的负重轮与中部负重轮之间,则该对负重轮之间履带的变形部分近似为圆弧,如图1b所示。
但若该圆弧的半径小于橡胶履带的最小弯曲半径,则可认为障碍处于另一侧,如图1c所示,若另一侧的圆弧曲率也不满足条件,则负重轮摆动位置是不合理的。
显然,障碍定位尚有不确定性,有必要分析和评估障碍位置对履带周长的影响。
设轮系中的两个相邻轮子为w1、w2,其轮心位置分别为 (x1, z1)和(x2, z2),A和B分别为变形部分与两轮的切点。
当变形部分为直线段时,如图2所示。
此时当相邻的3个轮子w1、w2、w3之间出现障碍时,如图3所示,图中α1、α2、α3与α的描述类似,均为各轮上切点与轮心连线相对x轴的角度。
L12为w1和w2之间的橡胶履带变形部分的长度,L23为w2和w3之间的橡胶履带变形部分的长度,L34为w3和w4之间的橡胶履带变形部分的长度,L3为履带与轮子w3接触部分的长度,以上长度均从履带中性层位置测量。
其中,α2和α3可通过式(1)~(4)算出。
橡胶履带圆弧变形部分的圆心位置(x12,z12)满足根据式(5)求得圆弧变形部分的圆心位置后,可求得圆弧变形部分的半径为轮子w3接触部分的长度为通过上述建模,橡胶履带的周长L将由环绕驱动轮、导向轮、负重轮的圆弧和各轮之间的直线段或者圆弧组成。
根据各轮半径、轮心位置以及履带中性层和履带内表面之间的距离δ即可求得橡胶履带的周长L。
某橡胶履带轮如图4a所示,包含左右两侧负重轮组和中部负重轮组,其中两侧的负重轮组各有两排负重轮,并成对使用摆臂悬架,中部负重轮组通过摇臂铰接在框架上,导向轮通过张紧臂铰接在框架上。
油缸一端和摇臂共点铰接在框架上,另一端和张紧臂铰接。
张紧臂、导向轮和张紧油缸构成张紧装置。
由于橡胶履带宽度方向的变形不影响橡胶履带的周长[19-20],则将履带轮简化为二维模型,其与坐标系如图4b所示,其中坐标系固定在框架上。
橡胶履带轮在水平地面静止状态下,已知参数如表1。
图中φ为张紧臂的摆角,λ为履带轮的接近角。
在图5b所示的履带轮静止状态下,初始的摆角φINI为150.02°,初始的接近角λINI为45.00°,履带初始周长LINI为3 820.30 mm。
该履带轮模型在履带接地部分上分布有5组负重轮,分别记为rw1、rw2、rw3、rw4、rw5。
按照前述分析,rw1至rw3、rw2至rw4、rw3至rw5均为相邻的负重轮组。
负重轮的摆动范围定义为负重轮摆动时轮心的最低位置至最高位置,两者的高度差为负重轮摆动幅度RA。
履带轮的结构需满足以下条件:(1)不干涉条件:避免履带轮的各轮(导向轮、驱动轮和负重轮)的运动干涉,减少行进中碎屑对各轮刮擦的可能性,要求各轮在运动时的最小距离不小于10 mm。
(2)履带弯曲条件:根据同类产品设计,履带的最小弯曲半径可保证在80 mm以上。
在表1所决定的履带轮参数条件下,有2个因素影响到履带接地长度:在摆动范围内的各个负重轮位置的组合;障碍定位,即如何在3组相邻的负重轮组下方布置障碍的位置。
为研究这两个因素对履带周长的影响,首先设定导向轮轮心位置不变,即导向轮在轮心位置铰接在框架上;其次设定所有负重轮的摆动范围相同。
为了避免干涉和履带过度弯曲,经计算检验,RA的最大值为70 mm,记为RAmax。
在相同的负重轮位置组合下,不同的障碍布置会影响履带周长,并使履带周长出现最小值L′min 和最大值L′max 。
随着负重轮位置的变化,L′min 和L′max 亦随之改变。
由负重轮摆动引起的履带周长变化量是Lvrs,定义为障碍定位对履带周长变化的影响系数是EA,定义为在设定RA条件下,随着负重轮位置组合的变化,L′max -L′min 、EA亦发生变化。
L′max -L′min 的最大值、最小值以及EA的最大值、最小值随RA变化分别如图5和图6所示。
通过分析,在满足不干涉条件下,负重轮摆动对履带周长的影响要比障碍定位对履带周长影响大一个数量级。
且障碍定位造成的履带周长的波动小于3.3 mm,小于履带周长的0.1%。
因此负重轮相对位置的变化对履带周长的影响具有决定性,可以忽略障碍位置差别。
障碍位置优先布置在rw1和rw2以及rw3和rw4之间。
基于上述分析,当导向轮固定时,随着RA的增加,履带的最大周长LMAX越来越大,而最小周长LMIN越来越小,如图7所示。
即随着RA的增加,履带轮脱带风险会增加,履带拉伸也越来越严重。
因此需匹配张紧装置的相关参数,以维持履带周长不变。
轮系的张紧能力定义为张紧装置能够维持履带长度不变的负重轮摆动幅度。
张紧过程中导向轮的摆动同样需满足不干涉条件。
此外,履带轮接近角会随着导向轮位置的改变而改变,较大的接近角便于履带轮越障,但过大的接近角会使履带轮越障爬升时动力不足,根据配套车辆性能,设定履带轮的接近角λ在20°~60°之间。
将履带的长度分为两部分(如图8):履带由rw1下方P1点逆时针环绕经过rw2、rw3、rw4和rw5至驱动轮上方P2点的长度,记为LRS;履带由驱动轮逆时针绕至rw1的长度,记为LSR。