经典机构结构原理与分析
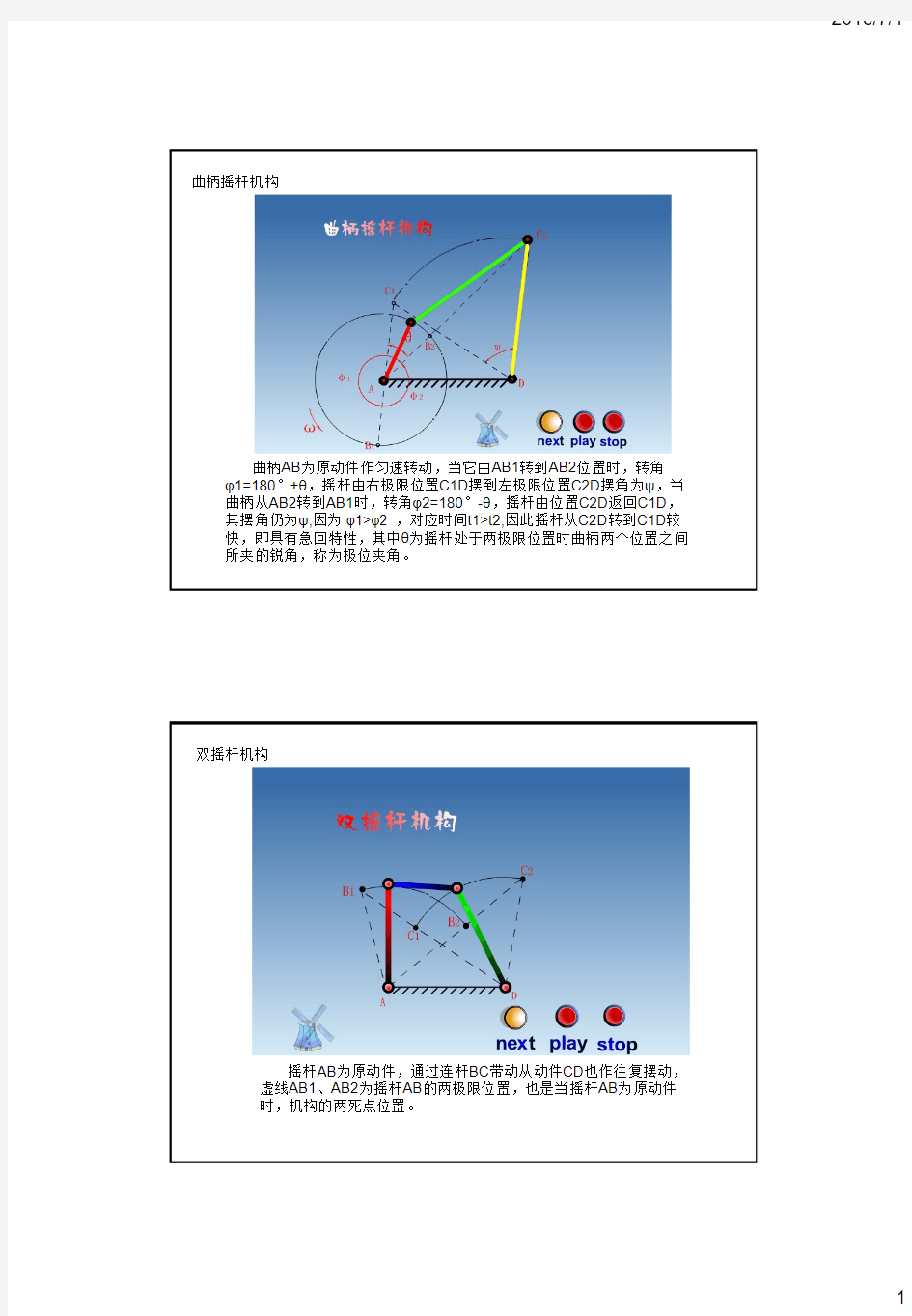
曲柄摇杆机构
曲柄AB为原动件作匀速转动,当它由AB1转到AB2位置时,转角φ1=180°+θ,摇杆由右极限位置C1D摆到左极限位置C2D摆角为ψ,当曲柄从AB2转到AB1时,转角φ2=180°-θ,摇杆由位置C2D返回C1D,其摆角仍为ψ,因为φ1>φ2 ,对应时间t1>t2,因此摇杆从C2D转到C1D较快,即具有急回特性,其中θ为摇杆处于两极限位置时曲柄两个位置之间所夹的锐角,称为极位夹角。
双摇杆机构
摇杆AB为原动件,通过连杆BC带动从动件CD也作往复摆动,虚线AB1、AB2为摇杆AB的两极限位置,也是当摇杆AB为原动件
时,机构的两死点位置。
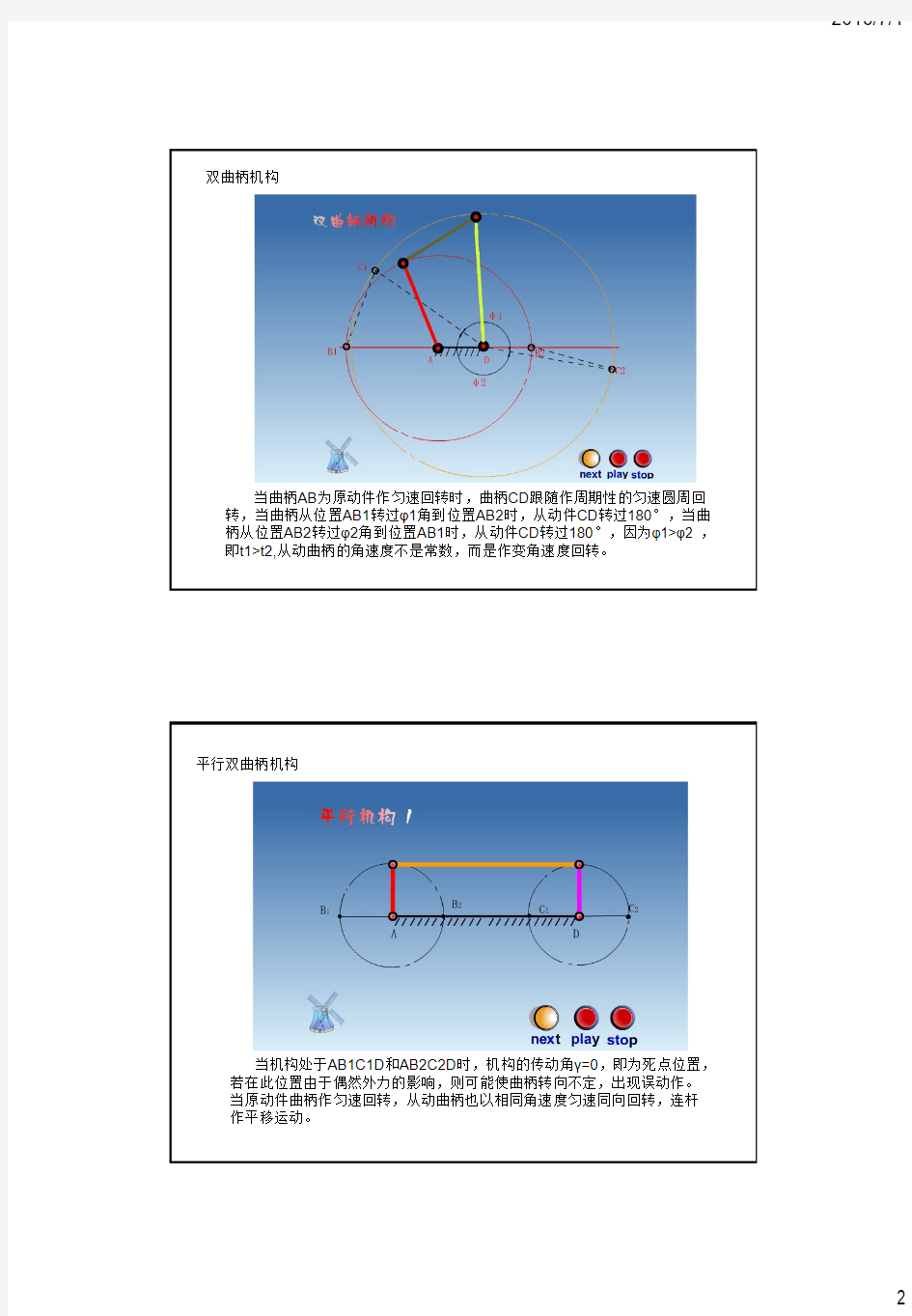
双曲柄机构
当曲柄AB为原动件作匀速回转时,曲柄CD跟随作周期性的匀速圆周回转,当曲柄从位置AB1转过φ1角到位置AB2时,从动件CD转过180°,当曲柄从位置AB2转过φ2角到位置AB1时,从动件CD转过180°,因为φ1>φ2 ,即t1>t2,从动曲柄的角速度不是常数,而是作变角速度回转。
平行双曲柄机构
当机构处于AB1C1D和AB2C2D时,机构的传动角γ=0,即为死点位置,若在此位置由于偶然外力的影响,则可能使曲柄转向不定,出现误动作。
当原动件曲柄作匀速回转,从动曲柄也以相同角速度匀速同向回转,连杆作平移运动。
平行机构
该机构为机车驱动轮联动机构,是利用平行曲柄来消除机构死点位置的运动不确定状态的。
搅拌机
该机构是一曲柄摇杆机构的应用实例,利用连杆上E点的轨迹来进行搅拌。
夹具机构
当工件被夹紧后,BCD成一直线,机构处于死点位置,即使工件的反力很大,夹具也不会自动松脱,该例为利用死点位置的自锁特性来实现工作要求的。
K=1的曲柄摇杆机构
从动件摇杆处于两极限位置时,对应主动件曲柄位置AB1、AB2共线,即极位夹角θ=0,K=1,机构没有急回特性。
翻台机构
本机构为翻台震实式造型机的翻台机构,是双摇杆机构,当造型完毕后,可将翻台F翻转180°,转到起模工作台的上面,以备起摸。
对心曲柄滑块机构
因导路的中线通过曲柄的回转中心而得名。该机构能把回转运动转换为往复直线运动或作相反的转变,广泛应用于蒸汽机、内燃机、空压机以及各种冲压机器中。
偏置曲柄滑块机构
因导路的中线不通过曲柄的回转中心而得名。偏心距为e,c1.c2为滑块的两极限位置,角为极位夹角,该机构具有急回特性。
摆动导杆机构
该机构具有急回运动性质,且其传动角始终为90度,具有最好的传力性能,常用于牛头刨床、插床和送料装置中。
定块机构
该机构是通过将曲柄滑块机构中的滑块固定而演化得出,它可把主动件
的回转或摆动转化为导杆相对于滑块的往复移动。
摇块机构
该机构是通过将曲柄滑块机构中的连杆固定而演化得出,它可把主动件的匀速回转运动转化为导杆相对于滑块的往复移动并随滑块摆动的形式。
转动导杆机构
该机构是通过将曲柄滑块机构中的曲柄固定演化而成,它可将主动件的匀速回转转化为导杆的非匀速摆动,且具有急回特性。
插齿机
该机构由两个四杆机构组成,粉红色的杆、红色杆、绿色杆、机架组成曲柄摇杆机构,绿色杆、橙色杆、黄色杆、机架组成摇杆滑块机构,
当粉红色的曲柄匀速回转时,绿色杆作变速摆动,通过橙色的连杆使黄
色的滑块向下切削时作近似匀速运动,往上则因曲柄摇杆机构的急回运
动性质使插齿刀快速退回。
牛头刨主机构
这是一个六杆机构,曲柄整周匀速转动,带动刨刀往复移动,该机构利用摆动导杆机构的急回特性使刨刀快速退回,以提高工作效率。插床导杆机构
利用摆动导杆机构的急回特性使插刀快速退回,以提高工作效率。
双滑块机构
该机构由曲柄滑块机构和摇杆滑块机构组成,曲柄绕A点匀速整周旋转,带动两滑块往复移动。
正弦机构
该机构是具有2个移动副的四杆机构,因从动件的位移与原动曲柄的转角的正弦成正比而得名,常用于缝纫机下针机构和其他计算装置中。
椭圆规
动杆联接两回转副,固定导杆联接两移动副,导杆呈十字形,动杆上各点轨迹为长短径不同的椭圆。
曲柄压力机
该机构由曲柄摇杆机构和摇杆滑块机构组成,其中CD杆是两机构的共用件,该机构的特点是原动件在用力不太大的情况下,可产生很大的压力,实现增力作用,常用于行程要求不大而压力要求很大的冲压、剪切等机械中。
飞轮
该机构为一对心曲柄滑块机构的应用形式,滑块为主动件,由于飞轮的惯性,使机构冲过了两个死点位置。
偏心轮
该机构本质上是曲柄滑块机构,偏心轮的回转中心A到它的几何中心B之间的距离叫偏心距,即曲柄长度。这种机构常用于冲床、剪床及润滑油泵中。
滚子对心移动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复移动,滚子接触,摩擦阻力小,不易摩擦,承载能力较大,但运动规律有局限性,滚子轴处有间隙,不宜高速。
平底移动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复移动,压力角始终为零度,传力特性好,结构紧凑,润滑性能好,摩擦阻力较小,适用于高速,但凸轮轮廓不允许呈下凹,因此实现准确的运动规律受到限制。
移动凸轮
当盘形凸轮的回转中心趋于无穷远时,即成为移动凸轮,一般作往复移动,多用于靠模仿形机械中。
形锁合凸轮
为保证凸轮机构能正常工作,必须保持凸轮轮廓与从动件相接触,该机构是靠凸轮与从动件的特殊几何结构来保持两者的接触。
滚子摆动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复摆动,滚子接触,摩擦阻力小,不易摩擦,承载能力较大,但运动规律有局限性,滚子轴处有间隙,不宜高速。螺杆传动1
螺杆转动,螺母移动.这种机构占据空间小,用于长行程螺杆,但螺杆两端的轴在和螺母防转机构使其结构较复杂。
螺杆传动2
螺杆不动,螺母旋转并移动.由于螺杆固定不转,因而两端支承结构简单,但精度不高.如应用于某些钻床工作台的升降.
螺杆传动3
螺母固定不动,螺杆转动并移动.这种结构以固定螺母为主要支承,结构简单,但占据空间大.常用于螺旋压力机、螺旋起重器、千分尺等.
螺杆传动4
螺母转动,螺杆移动.螺杆应设置防转装置和螺母转动要设置轴承均使结构复杂,且螺杆运动时占据空间尺寸,故很少应用
台虎钳
当转动手柄时,螺杆相对于螺母作螺旋运动,产生的位移带动活动钳口一起移动.这样,活动钳口相对于固定钳口之间可作合拢或张开的动作,从而可以夹紧或松开工件。
压力机
该机构是传力螺旋,螺母不动,螺杆旋转,以传力为主,一般速度较低,大多间歇工作,通常要求自锁
千斤顶
该机构是一种传力螺旋,以传力为主,用较小的驱动力矩可以产生很大的轴向载荷,螺母固定不动,螺杆转动并移动,
一般速度较低,通常要求自锁。
蜗杆传动机构
蜗杆传动用于传递空间垂直交错两轴间的运动和动力;传动比大、平稳性好;一定条件下可以自锁。因此,广泛用于各种设备的传动系
统中。
链传动
链传动靠链轮和链之间的啮合传递运动,而链轮之间有挠性链条,兼有啮合传动和挠性传动的特点。因此,可在不宜采用带传动和齿轮
传动的场合考虑采用链传动。
开口式带传动
传递平行轴之间的运动,两带轮转向相同。
带传动适于中心距较大的传动;传动平稳,可缓冲吸振;过载时打滑,能起安全保护作用。带传动的主要缺点是不能保证准确的传动
比,带的寿命和传动效率较低。适合于小功率的动力传动,在机械传
动系统中,多用于高速级。
交叉式带传动
传递平行轴之间的运动。两带轮转向相反。
执行机构基本工作原理(一)1
执行机构基本工作原理(一) ——执行机构发展史 一、执行机构的由来 执行机构,又称执行器,是一种自动控制领域的常用机电一体化设备(器件),是自动化仪表的三大组成部分(检测设备、调节设备和执行设备)中的执行设备。主要是对一些设备和装臵进行自动操作,控制其开关和调节,代替人工作业。 按动力类型可分为气动、液动、电动、电液动等几类;按运动形式可分为直行程、角行程、回转型(多转式)等几类。由于用电做为动力有其它几类介质不可比拟的优势,所以电动型近年来发展最快,应用面较广。电动型按不同标准又可分为:组合式结构和机电一体化结构;电器控制型、电子控制型和智能控制型(带HART、FF协议);数字型和模拟型;手动接触调试型和红外线遥控调试型等。 它是伴随着人们对控制性能的要求和自动控制技术的发展而迅猛发展的: 1.早期的工业领域,有许多的控制是手动和半自动的,在操作中人体直接接触工业设备的危险部位和危险介质(固、液、气三态的多种化学物质和辐射物质),极易造成对人的伤害,很不安全; 2.设备寿命短、易损坏、维修量大; 3.采用半自动特别是手动控制的控制效率很低、误差大,生产效率低下。 基于以上原因,执行机构逐渐产生并应用于工业和其它控制领
域,减少和避免了人身伤害和设备损坏,极大的提高了控制精确度和效率,同时也极大提高了生产效率。随着电子元器件技术、计算机技术和控制理论的飞速发展,国内外的执行机构都已跨入智能控制的时代。 二、执行机构的应用领域 执行机构主要应用在以下三大领域: 1、发电厂典型应用有:火电行业应用送风机风门挡板、一次进风风门挡板、空气预热风门挡板、烟气再循环、旁路风门挡板、二次进风风门挡板、主风箱风门挡板、燃烧器调节杆、燃烧器摇摆驱动器液压推杆驱动器、叶轮机调速、烟气调节阀、蒸气调节阀、球阀和蝶阀控制、滑动门、闸门;其它电力行业的阀门执行器应用球阀、除尘控制喷水、叶轮机转速控制、控制大型液压阀、燃气控制阀、燃烧器点火启动、蒸气控制阀、冷凝水再循环, 脱氧机,锅炉给水,过热控制器,再加热恒温控制器,及其它相关阀门应用 2、过程控制用于化工、石化、模具、食品、医药、包装等行业的生产过程控制,按照既定的逻辑指令或电脑程序对阀门、刀具、管道、挡板、滑槽、平台等进行精确的定位、起停、开合、回转,利用系统检测出的温度、压力、流量、尺寸、辐射、亮度、色度、粗糙度、密度等实时参数对系统进行调整,从而实现间歇、连续和循环的加工过程的控制。 3.工业自动化用于较为广泛的航空、航天、军工、机械、冶金、开采、交通、建材等方面,对各类自动化设备和系统的运动点(运动
鹏飞教育 自考 吉林大学 计算机 ————数据结构原理与分析
数据结构原理与分析 1. 具有n个结点的二叉树采用链接结构存储,链表中存放NULL指针域的个数为(n+1)。 2.串是(任意有限个字符构成的序列)。3.在一棵二叉树的二叉链表中,空指针域数等于非空指针域数加(2 )。4.某二叉树的前序和后序序列正好相反,则该二叉树一定是什么二叉树(高度等于其结点数)。 5. 对于栈操作数据的原则是(后进先出)。 6.若长度为n的非空线性表采用顺序存储结构,删除表的第i个数据元素,首先需要移动表中数据元素的个数是(n-i )。 7. 在非空二叉树的中序遍历序列中,二叉树的根结点的左边应该(只有左子树上的所有结点 )。 8. 排序方法中,从未排序序列中依次取出元素与已排序序列中的元素进行比较,将其放入已排序序列的正确位置上的方法,称为( 插入排序 )。 9. 若一棵二叉树具有45个度为2的结点,6个度为1的结点,则度为0的结点个数是(46 )。 10.某二叉树的前序和后序序列正好相同,则该二叉树一定是什么样的二叉树(空或只有一个结点)。 11. 在一个有向图中,所有顶点的入度之和等于所有边数( 4 )倍。12.串是(任意有限个字符构成的序列)。 13.对于栈操作数据的原则是(后进先出) 14. 设输入序列为A,B,C,D,借助一个栈不可以得到的输出序列是(D,A,B,C )。 15. 结点前序为xyz的不同二叉树,所具有的不同形态为(5 )。 16. 一维数组A采用顺序存储结构,每个元素占用6个字节,第6个元素的起始地址为100,则该数组的首地址是(70)。 17.在一棵高度为h(假定树根结点的层号为0)的完全二叉树中,所含结点个数不小于(2h )。 18. 在一个无向图中,所有顶点的度数之和等于所有边数( 2 )倍。 19.因此在初始为空的队列中插入元素a,b,c,d以后,紧接着作了两次删除操作,此时的队尾元素是 (d ). 20. 一般情况下,将递归算法转换成等价的非递归算法应该设置(堆栈)。21. 对于一棵满二叉树,m个树叶,n 个结点,深度为h,则(n=2h+1-1 )。 22. 线性表的长度是指(表中的元素个数)。 23. 用邻接表表示图进行深度优先遍历时,通常用来实现算法的辅助结构是(栈 )。 24. 堆的形状是一棵(完全二叉树 )。 25. 设abcdef以所给的次序进栈,若在进栈操作时,允许退栈操作,则下面得不到的序列为( cabdef)。 26. 若长度为n的非空线性表采用顺序存储结构,删除表的第i个数据元素,i的合法值应该 是( C. 1≤i≤n)。 27.在一棵二叉树的二叉链表中,空指针域数等于非空指针域数加(2 )。28. 若某线性表中最常用的操作是取第i个元素和删除最后一个元素,则采用什么存储方 式最节省时间(顺序表)。 29.一组记录的关键字为{45, 80, 55, 40, 42, 85},则利用堆排序的方法建立的初始堆为(85, 80, 55, 40, 42, 45 )。 30. 如果T2是由有序树T转换而来的二叉树,那么T中结点的先根序列就是T2中结点的(先根序列)。 31. 对于一棵满二叉树,m个树叶,n 个结点,深度为h,则(n=2h+1-1 )。32.具有n个顶点的有向图最多可包含的有向边的条数是(n(n-1) )。 33.设有6000个无序的元素,希望用最快的速度挑选出其中前5个最大的元素,最好选用(堆排序)法。 34.任何一个无向连通图的最小生成树(有一棵或多棵 )。 35. 排序方法中,从未排序序列中挑选元素,将其放入已排序序列的一端的方法,称为(选择排序)。 36. 对有14个数据元素的有序表R[14]进行折半搜索,搜索到R[3]的关键码等于给定值,此时元素比较顺序依次为(R[6],R[2],R[4],R[3] )。 37. 因此在初始为空的队列中插入元素a,b,c,d以后,紧接着作了两次删除操作,此时的队尾元素是 (d )。 38.深度为h且有多少个结点的二叉树称为满二叉树(2h+1-1 )。39.某二叉树的前序和后序序列正好相反,则该二叉树一定是的二叉树为(高度等于其结点数)。 40. 带头结点的单链表head为空的判断条件是(head->next==NULL)。41.栈和队列的主要区别在于(插入删 除运算的限定不一样) 42. 设高度为h的二叉树上只有度为0 和度为2的结点,则此类二叉树中所包 含的结点数至少为(2h-1 )。 43.在一个单链表中,若删除(*p)结点 的后继结点,则执行 (p->next=p->next->next)。 44.在一棵具有n个结点的二叉树中, 所有结点的空子树个数等于 (n+1 ) 45.若一棵二叉树有11个度为2的结 点,则该二叉树的叶结点的个数是 (12 )。 46. 对有n个记录的表按记录键值有序 建立二叉查找树,在这种情况下,其平 均查找长度的量级为(O(n) )。 47. 有向图中,以顶点v为终点的边的 数目,称为顶点v的(入度)。 48. 链栈和顺序栈相比,有一个较明显 的优点是(通常不会出现栈满的情况)。 49. 若频繁地对线性表进行插入和删 除操作,该线性表应该采用的存储结构 是(链式)。 50. 设一个栈的输入序列是 1,2,3, 4,5,则下列序列中,是栈的合法输出 序列的是(3 2 1 5 4)。 51.设森林F中有三棵树,第一、第二 和第三棵的结点个数分别为m1,m2和 m3,则森林F对应的二叉树根结点上的 右子树上结点个数是 ( m2+m3 )。 52. 有数据{53,30,37,12,45,24, 96},从空二叉树开始逐个插入数据来 形成二叉查找树,若希望高度最小,则 应选择下面输入序列是 ( 37,24,12,30,53,45,96)。 53.若要在O(1)的时间复杂度上实现 两个循环链表头尾相接,则应对两个循 环链表各设置一个指针,分别指向(各 自的尾结点 )。 54. 二叉树的第I层上最多含有结点数 为(2I )。 55.设高度为h的二叉树上只有度为0 和度为2的结点,则此类二叉树中所包 含的结点数至少为(2h-1 )。 56.如果T2是由有序树T转换而来的二 叉树,那么T中结点的先根序列就是T2 中结点的(先根序列)。 57. 用分划交换排序方法对包含有n个 关键的序列进行排序,最坏情况下执 行的时间杂度为(O(n2))。 58. 有n个叶子的哈夫曼树的结点总数 为(2n-1 )。 59. 稀疏矩阵一般采用的压缩存储方 法为(三元组表)。 60. 若二叉树中度为2的结点有15个, 度为1 的结点有10个,则叶子结点的 个数为(16 )。 61. 若某完全二叉树的深度为h,则该 完全二叉树中具有的结点数至少是(2h -1 )。 62. 任何一棵二叉树的叶结点在其先 根、中根、后根遍历序列中的相对位置 (肯定不发生变化)。 63.初始序列已经按键值有序时,用直 接插入算法进行排序,需要比较的次数 为( n-1)。 64. 对有n个记录的有序表采用二分查 找,其平均查找长度的量级为 (O(log2n))。 65用冒泡排序法对序列 {18,16,14,12,10,8}从小到大进行排 序,需要进行的比较次数是(15 )。 66在一个有向图中,所有顶点的出度之 和等于所有边数的倍数是( 1 )。 67.有n个顶点的图采用邻接矩阵表示, 则该矩阵的大小为(n*n )。 68.6个顶点的无向图成为一个连通图 至少应有边的条数是(5 )。 69. 对有14个数据元素的有序表R[14] 进行折半搜索,搜索到R[3]的关键码等 于给定值,此时元素比较顺序依次为 (R[6],R[4],R[2],R[3])。 70. 串是(任意有限个字符构成的序 列)。 71.个无向图中,所有顶点的度数之和 等于所有边数(1 )倍。 72.单链表表示的链式队列的队头在链 表的什么位置(链头)。 73. 一组记录的关键字为{45, 80, 55, 40, 42, 85},则利用堆排序的方法建 立的初始堆为(85, 80, 55, 40, 42, 45 )。 74. 对于一棵满二叉树,m个树叶,n 个结点,深度为h,则(n=2h+1-1) 75.某二叉树的前序和后序序列正好相 同,则该二叉树一定是什么样的二叉树 (空或只有一个结点)。 76.在一棵具有n个结点的二叉树中, 所有结点的空子树个数等于(n+1 )。 77. 若长度为n的线性表采用顺序存储 结构,在表的第i个位置插入一个数据 元素,需要移动表中元素的个数是 (n-i+1)。 78. 树中所有结点的度等于所有结点 数加(-1 )。 79.设二叉树根结点的层次为0,一棵高 度为h 的满二叉树中的结点个数是 (2h+1-1 )。 80. 将一棵有50个结点的完全二叉树 按层编号,则对编号为25的结点x,该 结点(有左孩子,无右孩子)。 81. 设有数组A[i,j],数组的每个元素 长度为3字节,i的值为1 到8 ,j的 值为1 到10,数组从内存首地址BA开 始顺序存放,当用以列为主存放时,元 素A[5,8]的存储首地址为 ( BA+180 )。 82.在一个具有n个顶点的完全无向图 的边数为 (n(n-1)/2 )。 83.设森林F中有三棵树,第一、第二 和第三棵的结点个数分别为m1,m2和 m3,则森林F对应的二叉树根结点上的 右子树上结点个数是 (m2+m3 )。 84.对于键值序列 {72,73,71,23,94,16,5,68,76,103}用 筛选法建堆,开始结点的键值必须为 (94 )。 85. 在图形结构中,每个结点的前驱结 点数和后续结点数可以有(任意多 个 )。 86.对有n个记录的有序表采用二分查 找,其平均查找长度的量级为 (O(log2n) )。 87. 用孩子兄弟链表表示一棵树,若要 找到结点x的第5个孩子,只要先找到 x的第一个孩子,然后(从兄弟域指针连 续扫描4个结点即可)。 88.有一个有序表为{1,3,9,12,32, 41,45,62,75,77,82,95,100}, 当二分查找值为82的结点时,查找成 功的比较次数是(4 )。. 89. 当初始序列已经按键值有序时,用 直接插入算法进行排序,需要比较的次 数为(n-1 )。 90.深度为h的满二叉树具有的结点个 数为(2h+1-1 )。 91. 二维数组A[5][6]的每个元素占5 个单元,将其按行优先顺序存储在起始 地址为3000的连续的内存单元中,则 元素A[4][5]的存储地址为(3145)。 92.一个具有n个顶点e条边的无向图 中,采用邻接表表示,则所有顶点的邻 接表的结点总数为(2e )。 93. 一个具有n个顶点的图采用邻接矩 阵表示,则该矩阵的大小为(n*n)。 94. 一个具有n个顶点e条边的无向图 中,采用邻接表表示,则所有顶点的邻 接表的结点总数为( 2e )。 95. 若要在O(1)的时间复杂度上实现 两个循环链表头尾相接,则应对两个循 环链表各设置一个指针,分别指向 ( 各自的尾结点)。 96.在一棵高度为h(假定树根结点的层 号为0)的完全二叉树中,所含结点个数 不小于(2h )。 97. 若待排序对象序列在排序前已按 其排序码递增顺序排序,则采用比较次 数最少的方法是(直接插入排序)。 98. 有n个叶子的哈夫曼树的结点总数 为(2n-1 )。 99.二分查找法要求查找表中各元素的 键值必须是(递增或递减 )。 100. 在对n个元素进行冒泡排序的过 程中,最好情况下的时间复杂性为 ( ()n )。 101.链栈和顺序栈相比,有一个较明显 的优点是(通常不会出现栈满的情 况 )。 102. 将长度为m的单链表连接在长度 为n的单链表之后的算法的时间复杂度 为(O(n) )。 103.若待排序对象序列在排序前已按 其排序码递增顺序排序,则采用(直接 插入排序)方法比较次数最少。 104. 若字符串“1234567”采用链式 存储,假设每个字符占用1个字节,每 个指针占用2个字节,则该字符串的存 储密度为(33.3﹪)。 105.用分划交换排序方法对包含有n个 关键的序列进行排序,最坏情况下执 行的时间杂度为(O(n2) )。 106. 若在一棵非空树中,某结点A有3 个兄弟结点(包括A自身),B是A的双 亲结点,则B的度为(3)。 107. 单链表中,增加头结点的目的是 为了(方便运算的实现)。 108. 深度为h的满二叉树所具有的结 点个数是(2h+1-1 )。 109.按照二叉树的定义,具有3个结点 的二叉树有多少种(5 )。 110. 设长度为n的链队列用单循环链 表表示,若只设头指针,则入队操作的 时间复杂度为(O(n) )。 111.树中所有结点的度等于所有结点 数加(-1 )。 112. 树中所有结点的度等于所有结点 数加( -1 ) 113. 设有三个元素X,Y,Z顺序进栈 (进的过程中允许出栈),下列得不到 的出栈排列是(ZXY )。 114. 用邻接表表示图进行深度优先遍 历时,通常采用的辅助存储结构是 (栈)。 115. 对有18个元素的有序表作二分 (折半)查找,则查找A 3的比较序列 的下标为(9、4、2、3)。 116. 在含n个顶点e条边的无向图的 邻接矩阵中,零元素的个数为 ( n2-2e)。 117. 树形结构的特点是:一个结点可 以有 ( 多个直接后继)。 118. 使具有30个顶点的无向图成为一 个连通图至少应有边的条数是(29)。 119. 按照二叉树的定义,具有3个结点 的二叉树具有的种类为(5 )。 120. 使具有9个顶点的无向图成为一 个连通图至少应有边的条数是(8 )。 121. 在顺序表(n足够大)中进行顺序 查找,其查找不成功的平均长度是 (n+1 )。 122. 设树T的度为4,其中度为1,2, 3和4的结点个数分别为4,2,1,1 则 T中的叶子数为( 8 )。 123. 栈的插入和删除操作进行的位置 在(栈顶)。 124. 某二叉树的前序和后序序列正好 相同,则该二叉树一定是的二叉树为 (空或只有一个结点)。 125. 链栈和顺序栈相比,有一个较明 显的优点是(通常不会出现栈满的情 况)。 126. 对稀疏矩阵进行压缩存储是为了 (节省存储空间)。 127. 结点前序为xyz的不同二叉树, 所具有的不同形态为(5 )。 128. 若一棵二叉树具有20个度为2的 结点,6个度为1的结点,则度为0的 结点个数是(21 )。 129. 一棵线索二叉树的线索个数比链 接个数多( 2 )个。 1. 若一棵二叉树有10个叶结点,则该 二叉树中度为2的结点个数为9。 2.在有序表(12,24,36,48,60,72,84) 中二分查找关键字72时所需进行的关 键字比较次数为2。 3.对于一棵二叉树,设叶子结点数为n0, 次数为2的结点数为n2,则n0和n2的 关系是n0= n2+1。 4. 在循环链表中,从任何一结点出发 都能访问到表中的所有结点。 5. 普里姆(Prim)算法适用于边稠密 图。 6.深度为h且有2k-1个结点的二叉树 称为满二叉树。(设根结点处在第1层)。 7.图的深度优先搜索方法类似于二叉 树的先序遍历。 8.哈夫曼树是带权路径长度最小的二 叉树。 9. 二叉树的存储结构有顺序存储结构 和链式存储结构。 10. 哈夫曼树是带权路径长度最小的 二叉树。 11.一般树的存储结构有双亲表示法、 孩子兄弟表示法和孩子链表表示法。 12. 将数据元素 2,4,6,8,10,12,14,16,18,20依次存于 一个一维数组中,然后采用折半查找元 素12,被比较过的数组元素的下标依次 为5,7,6 。。 13. 图的深度优先遍历序列不是唯一 的。 14. 下面程序段的时间复杂度是 O (mn)。 for (int i=1;i<=n;i++) for (int j=1;j<=m;j++) a[i][j]=0; 16. 图的遍历是指从图中某一顶点出 发访问图中全部顶点且使每一顶点仅 被访问一次。 17. 在一个图中,所有顶点的度数之和 等于所有边的数目的2倍。 18. 由一棵二叉树的后序序列和中序 序列可唯一确定这棵二叉树。 19. 在有序表(12,24,36,48,60,72,84) 中二分查找关键字72时所需进行的关 键字比较次数为2。 20. 若二叉树的一个叶子结点是某子 树的中根遍历序列中的第一个结点,则 它必是该子树的后跟遍历中的第一个 结点。 21.在直接插入排序、直接选择排序、 分划交换排序、堆排序中稳定的排序方 法有直接插入排序。 22.具有100个结点的完全二叉树的叶 子结点数为50。 23.普里姆(Prim)算法适用于边稠密 图。 24. 在n个结点的顺序表中插入一个结 点需平均移动 n/2 个结点。 25.将一棵树转换成一棵二叉树后,二 叉树根结点没有右子树。 26循环队列的引入,目的是为了克服 假溢出。 27.若连通网络上各边的权值均不相 同,则该图的最小生成树有1棵。 28.在有序表(12,24,36,48,60,72,84) 中二分查找关键字72时所需进行的关 键字比较次数为2 。 29.栈和队列的共同特点是插入和删除 均在端点处进行。 30. 二叉树的遍历方式有三种:先序遍 历、中序遍历、后序遍历。 31. 若连通图的顶点个数为n,则该图 的生成树的边数为n-1。 32.图的存储结构最常用的有邻接矩阵 和邻接表。 33. 若一棵二叉树有15个叶结点,则 该二叉树中度为2的结的点个数为14。 34.队列中允许进行插入的一端称为队 尾。 35.拓扑排序输出的顶点数小于有向图 的顶点数,则该图一定存在环。 36.在有序表(15,23,24,45,48,62,85) 中二分查找关键词23时所需进行的关 键词比较次数为2。 37. 则高度为k的二叉树具有的结点数 目,最少为k,最多为2k-1。 38. 若连通网络上各边的权值均不相 同,则该图的最小生成树有1棵。 39. 一个栈的输入序列是:1,2,3则 不可能的栈输出序列是3 1 2。 40. 设有一个顺序栈S,元素S1,S2, S3,S4,S5,S6依次进栈,如果6个元 素的出栈顺序为S2,S3,S4,S6,S5, S1,则顺序栈的容量至少应为 3 。 41. 对于一棵二叉树,设叶子结点数为 n0,次数为2的结点数为n2,则n0和n2 的关系是 n0= n2+1 。 42. 设某二叉树的后序遍历序列为 ABKCBPM,则可知该二叉树的根为 M 。 43. 数据结构的三个方面:数据的 逻辑结构、物理结构、运算。 44. 每个结点只有一个链接域的 链表叫做单链表。 45. 设无向图G的顶点数为n,则要使 G连通最少有 n-1条边。 46. 组成串的数据元素只能是字符。 47.图的存储结构最常用的有邻接表 和邻接矩阵。 48. 由一棵二叉树的后序序列和中序 序列可唯一确定这棵二叉树。 49. 队列中允许进行插入的一端称为 队尾。 1.对于一个队列,如果输入项序列由 1,2,3,4所组成,试给出全部可能的输 出序列。 答:1,2,3,4。 2. 已知一棵二叉树的中序和前序序列 如下,求该二叉树的后序序列。 中序序列:c,b,d,e,a,g,i,h, j,f 前序序列:a,b,c,d,e,f,g,h, i,j 答:该二叉树的后序序列为: c,e,d,b,i,j,h,g,f,a 3. 为什么说树是一种非线性结构? 答:树中的每个结点除了根结点外,其 余每个结点有一个直接前驱,但有多个 直接后继,所以说树是一种非线性结 构。 4.将算术表达式a+b*(c+d/e)转为后 缀表达式。 答: B.abcde/+*+ 5. 找出所有这样的二叉树形,其结点 在先根次序遍历和中根次序遍历下的 排列是一样的。 答:为空树,或为任一结点至多只有 右子树的二叉树。 8.有 n 个顶点的无向连通图至少有 多少条边?有 n 个顶点的有向连通 图至少有多少条边? 答:有 n 个顶点的无向连通图至少有 n-1条边,有 n 个顶点的有向连通图 至少有n条边。 9.下面列举的是常用的排序方法:直 接插入排序,起泡排序,快速排序,直 接选择排序,堆排序,归并排序。试问, 哪些排序方法是稳定的? 答:起泡排序, 直接插入排序,归并排 序是稳定的。 10. 完全二叉树用什么数据结构实现 最合适,为什么? 答:完全二叉树用一维数组实现最合 适。因为完全二叉树保存在一维数组中 时,数组内没有空洞,不存在空间浪费 问题;另外,顺序存储方式下,父子结 点之间的关系可用公式描述,即已知父 (或子)结点寻找子(或父)结点只需 计算一个公式,访问结点方便。但采用 链表存储时就存在空间浪费问题,因为 每个结点要另外保存两个链接域,并且 寻找结点也不容易。 11.线性表有两种存储结构:一是顺序 表,二是链表。试问:如果有 n个线性 表同时并存,并且在处理过程中各表的 长度会动态变化,线性表的总数也会自 动地改变。在此情况下,应选用哪种存 储结构?为什么? 答:选链式存储结构。它可动态申请内 存空间,不受表长度(即表中元素个数) 的影响,插入、删除时间复杂度为O(1)。 12.试述顺序存储和链式存储的区别及 各自的优缺点。 答:数组占用连续的内存空间,链表不 要求结点的空间连续。 1)插入与删除操作:由于数组在插入 与删除数据时需移动大量的数据元素, 而链表只需要改变一些指针的链接,因 此,链表比数组易于实现数据的插入和 删除操作。 2)内存空间的占用情况:因链表多了 一个指针域,故较浪费空间,因此,在 空间占用方面,数组优于链表。 3)数据的存取操作:访问链表中的结 点必须从表头开始,是顺序的存取方 式,而数组元素的访问是通过数组下标 来实现的,是随机存取方式,因此,在 数据存取方面,数组优于链表。 数据的合并与分离:链表优于数组,因 为只需要改变指针的指向 13. 将表达式 ((a+b)-c*(d+e)-f)*(g+h)改写成后缀 表达式。 答:后缀表达式为:ab+cde+*-f-gh+* 19.写出中缀表达式A-(B+C/D)*E的后 缀形式。 答:中缀表达式A-(B+C/D)*E的后缀形 式是:ABCD/+E*-。 20.为什么用二叉树表示一般树? 答:树的最直观表示是为树中结点设置 指向子结点的指针域,对k叉树而言, 每个结点除data域外,还有k个链接 域。这样,对一个有n个结点的k叉树 来说,共有n*k个指针域,其中n-1个 不空,另外n(k-1)+1个指针域为空, 因此,空链接域的比例约为(k-1)/k , 于是导致大量的空间浪费。然而,如果 采用二叉树表示一棵n个结点的树,则 树中共有2n个链接域,其中未用到的 有n+1个,占所有指针域的比例约为 1/2,空间浪费少很多。 另外,因为任何树型结构都可 以转换成二叉树,因此,通常用二叉树 表示树型结构。 21.已知数据序列为 12,5,9,20,6,31,24,对该数据序列进 行排序,试写出冒泡排序每趟的结果。 答:初始键值序列12 5 9 20 6 31 24 第一趟排序 [5 9 12 6 20 24] 31 第二趟排序 [5 9 6 12 20] 24 31 第三趟排序 [5 9 6 12] 20 24 31 第四趟排序 5 6 9 12 20 24 31 22.试找出前序序列和中序序列相同的 所有二叉树。 解答:空树或缺左子树的单支树。 23.完全二叉树用什么数据结构实现最 合适,为什么? 答:完全二叉树用一维数组实现最合 适。因为完全二叉树保存在一维数组中 时,数组内没有空洞,不存在空间浪费 问题;另外,顺序存储方式下,父子结 点之间的关系可用公式描述,即已知父 (或子)结点寻找子(或父)结点只需 计算一个公式,访问结点方便。但采用 链表存储时就存在空间浪费问题,因为 每个结点要另外保存两个链接域,并且 寻找结点也不容易。 26.我们已经知道,树的先根序列与其 对应的二叉树的先根序列相同,树的后 根序列与其对应的二叉树的中根序列 相同。那么利用树的先根遍历次序与后 根遍历次序,能否唯一确定一棵树?请 说明理由。 答:能。因为树的先根序列与其对应的 二叉树的先根序列相同,树的后根序列 与其对应的二叉树的中根序列相同,而 二叉树的先根序列与二叉树的中根序 列能唯一确定一棵二叉树,所以利用树 的先根遍历次序与后根遍历次序,能唯 一确定一棵树。 28.已知一棵二叉树的中序和前序序列 如下,求该二叉树的后序序列。 中序序列:c,b,d,e,a,g,i,h, j,f 前序序列:a,b,c,d,e,f,g,h, i,j 答:该二叉树的后序序列为: c,e,d,b,i,j,h,g,f,a 29.对半查找是否适合于以链接结构 组织的表? 答:对半查找不适合于以链接结构组织 的表。。 30. 请指出中序遍历二叉查找树的结 点可以得到什么样的结点序列。 答:中序遍历二叉查找树的结点就可以 得到从小到大排序的结点序列。 31.已知数据序列为 12,5,9,20,6,31,24,对该数据序列进 行排序,试写出归并排序每趟的结果。 解答: 初始键值序列12 5 9 20 6 31 24 第一趟排序 [5 12] [9 20] [6 31] [24] 第二趟排序 [5 9 12 20] [6 24 31] 第三趟排序 5 6 9 12 20 24 31() 37.一组记录的关键字为(52, 56, 26, 12, 69, 85, 33, 48, 70),给出快速 排序的过程。 解答:解:52, 56, 26, 12, 69, 85, 33, 48, 70 第一趟排序 33, 48, 26, 12, 52, 85, 69, 56, 70 第二趟排序 26, 12, 33, 48, 52, 69, 56, 70, 85 第三趟排序 12, 26, 33, 48, 52, 56, 70, 69, 85 第四趟排序 12, 26, 33, 48, 52, 56, 70, 69, 85 第五趟排序 12, 26, 33, 48, 52, 56, 70, 69, 85 38.下面列举的是常用的排序方法:直 接插入排序,起泡排序,快速排序,直 1
人力资源结构分析理论介绍
人力资源结构分析 人力资源规划首先要进行人力资源结构分析。所谓人力资源结构分析也就是对企业现有人力资源的调查和审核,只有对企业现有人力资源有充分的了解和有效的运用,人力资源的各项计划才有意义。人力资源结构分析主要包括以下几个方面: (一)人力资源数量分析 人力资源规划对人力资源数量的分析,其重点在于探求现有的人力资源数量是否与企业机构的业务量相匹配,也就是检查现有的人力资源配量是否符合一个机构在一定业务量内的标准人力资源配置。在人力资源配置标准的方法运用上,通常有以下几种: 1、动作时间研究。动作时间研究指对一项操作动作需要多少时间,这个时间包括正常作业、疲劳、延误、工作环境配合、努力等因素。定出一个标准时间,再根据业务量多少,核算出人力的标准。 2、业务审查。业务审查是测定工作量与计算人力标准的方法,该方法又包括两种: (1)最佳判断法。该方法是通过运用各部门主管及人事、策划部门人员的经验,分析出各工作性质所需的工作时间,在判断出人力标准量。 (2)经验法。该方法是根据完成某项生产、计划或任务所消耗的人事纪录,来研究分析每一部门的工作负荷,再利用统计学上的平均数、标准差等确定完成某项工作所需的人力标准。 3、工作抽样。工作抽样又称工作抽查,是一种统计推论的方法。
它是根据统计学的原理,以随机抽样的方法来测定一个部门在一定时间内,实际从事某项工作所占规定时间的百分率,以此百分率来测定人力通用的效率。该方法运用于无法以动作时间衡量的工作。 4、相关与回归分析法。相关与回归分析法是利用统计学的相关与回归原理来测量计算的,用于分析各单位的工作负荷与人力数量间的关系。 有了人力标准的资料,就可以分析计算现有的人数是否合理。如不合理,应该加以调整,以消除忙闲不均的现象。 (二)人员类别的分析 通过对企业人员类别分析,可现实一个机构业务的重心所在。它包括以下两种方面的分析: 1、工作功能分析。一个机构内人员的工作能力功能很多,归纳起来有四种:业务人员、技术人员、生产人员和管理人员。这四类人员的数量和配置代表了企业内部劳力市场的结构。有了这项人力结构分析的资料,就可研究各项功能影响该结构的因素,这些因素可能包括以下几个方面:企业处在何种产品或市场中,企业运用何种技能与工作方法,劳力市场的供应状况如何等。 2、工作性质分析。按工作性质来分,企业内部工作人员又可分为两类:直接人员和间接人员。这两类人员的配置,也随企业性质不同而有所不同。最近的研究发现,一些组织中的间接人员往往不合理的膨胀,该类人数的增加与组织业务量增长并无直接联系,这种现象被称为“帕金森定律”。
SVC&TCSC的原理及应用
Chapter23 Improvement of system stability margins using coordination control of Static Var Compensator(SVC)and Thyristor Controlled Series Capacitor(TCSC) Venu Yarlagadda,K.R.M.Rao and B.V.Sankar Ram Abstract The Thyristor Controlled Series Compensator(TCSC)and Static Var Compensator(SVC)are variable impedance Flexible AC Transmission Systems (FACTS)Controllers.A combination of the TCSC and the SVC installation is proposed to acquire superior performance for the power system.The coordination between the two pieces of equipment is designed with the SVC treated as the supplement of the TCSC.When operation of the TCSC is constrained by the inherent limitation of equipment,such as due to the?ring-angle limitation of the thyristors,the adjustable SVC can supply the auxiliary support to improve the overall performance.The voltage and angle stability margins can be greatly improved with the compatible control schemes of the TCSC and the SVC. Keywords TCSCáSVCáCo-ordination control of SVC and TCSCáDesign of small scale TCSC modeláVariable impedance FACTS controllersáSingle machine two bus systemáVoltage stabilityáP–V curves and P-d curves V.Yarlagadda(&) EEE Department,VNR VJIET,Hyderabad,India e-mail:venuyar@https://www.360docs.net/doc/cd4940703.html, K.R.M.Rao EEE Department,MJCET,Hyderabad,India B.V.Sankar Ram EEE Department,JNTUH,Hyderabad,India 207 V.V.Das(ed.),Proceedings of the Third International Conference on Trends in Information, Telecommunication and Computing,Lecture Notes in Electrical Engineering150, DOI:10.1007/978-1-4614-3363-7_23,óSpringer Science+Business Media New York2013
(完整版)机械原理知识点归纳总结
第一章绪论 基本概念:机器、机构、机械、零件、构件、机架、原动件和从动件。 第二章平面机构的结构分析 机构运动简图的绘制、运动链成为机构的条件和机构的组成原理是本章学习的重点。 1. 机构运动简图的绘制 机构运动简图的绘制是本章的重点,也是一个难点。 为保证机构运动简图与实际机械有完全相同的结构和运动特性,对绘制好的简图需进一步检查与核对(运动副的性质和数目来检查)。 2. 运动链成为机构的条件 判断所设计的运动链能否成为机构,是本章的重点。 运动链成为机构的条件是:原动件数目等于运动链的自由度数目。 机构自由度的计算错误会导致对机构运动的可能性和确定性的错误判断,从而影响机械设计工作的正常进行。 机构自由度计算是本章学习的重点。 准确识别复合铰链、局部自由度和虚约束,并做出正确处理。 (1) 复合铰链 复合铰链是指两个以上的构件在同一处以转动副相联接时组成的运动副。 正确处理方法:k个在同一处形成复合铰链的构件,其转动副的数目应为(k-1)个。 (2) 局部自由度 局部自由度是机构中某些构件所具有的并不影响其他构件的运动的自由度。局部自由度常发生在为减小高副磨损而增加的滚子处。 正确处理方法:从机构自由度计算公式中将局部自由度减去,也可以将滚子及与滚子相连的构件固结为一体,预先将滚子除去不计,然后再利用公式计算自由度。 (3) 虚约束 虚约束是机构中所存在的不产生实际约束效果的重复约束。 正确处理方法:计算自由度时,首先将引入虚约束的构件及其运动副除去不计,然后用自由度公式进行计算。 虚约束都是在一定的几何条件下出现的,这些几何条件有些是暗含的,有些则是明确给定的。对于暗含的几何条件,需通过直观判断来识别虚约束;对于明确给定的几何条件,则需通过严格的几何证明才能识别。 3. 机构的组成原理与结构分析 机构的组成过程和机构的结构分析过程正好相反,前者是研究如何将若干个自由度为零的基本杆组依次联接到原动件和机架上,以组成新的机构,它为设计者进行机构创新设计提供了一条途径;后者是研究如何将现有机构依次拆成基本杆组、原动件及机架,以便对机构进行结构分类。 第三章平面机构的运动分析 1.基本概念:速度瞬心、绝对速度瞬心和相对速度瞬心(数目、位置的确定),以及“三心定理”。 2.瞬心法在简单机构运动分析上的应用。 3.同一构件上两点的速度之间及加速度之间矢量方程式、组成移动副两平面运动构件在瞬时重合点上速度之间和加速度的矢量方程式,在什么条件下,可用相对运动图解法求解? 4.“速度影像”和“加速度影像”的应用条件。 5.构件的角速度和角加速度的大小和方向的确定以及构件上某点法向加速度的大小和方向的确定。 6.哥氏加速度出现的条件、大小的计算和方向的确定。 第四章平面机构的力分析 1.基本概念:“静力分析”、“动力分析”及“动态静力分析” 、“平衡力”或“平衡力矩”、“摩擦角”、“摩擦锥”、“当量摩擦系数”和“当量摩擦角”(引入的意义)、“摩擦圆”。 2.各种构件的惯性力的确定: ①作平面移动的构件; ②绕通过质心轴转动的构件;
蛋白质结构分析原理及工具-文献综述
蛋白质结构分析原理及工具 (南京农业大学生命科学学院生命基地111班) 摘要:本文主要从相似性检测、一级结构、二级结构、三维结构、跨膜域等方面从原理到方法再到工具,系统地介绍了蛋白质结构分析的常用方法。文章侧重于工具的列举,并没有对原理和方法做详细的介绍。文章还列举了蛋白质分析中常用的数据库。 关键词:蛋白质;结构预测;跨膜域;保守结构域 1 蛋白质相似性检测 蛋白质数据库。由一个物种分化而来的不同序列倾向于有相似的结构和功能。物种分化后形成的同源序列称直系同源,它们通常具有相似的功能;由基因复制而来的序列称为旁系同源,它们通常有不同的功能[1]。因此,推测全新蛋白质功能的第一步是将它的序列与进化上相关的已知结构和功能的蛋白质序列比较。表一列出了常用的蛋白质序列数据库和它们的特点。 表一常用蛋白质数据库 网址可能有更新 氨基酸替代模型。进化过程中,一种氨基酸残基会有向另一种氨基酸残基变化的倾向。氨基酸替代模型可用来估计氨基酸替换的速率。目前常用的替代模型有Point Accepted Mutation (PAM)矩阵、BLOck SUbstitution Matrix (BLOSUM)矩阵[2]、JTT模型[3]。 序列相似性搜索工具。序列相似性搜索又分为成对序列相似性搜索和多序列相似性搜索。成对序列相似性搜索通过搜索序列数据库从而找到与查询序列相似的序列。分为局部联配和全局联配。常用的局部联配工具有BLAST和SSEARCH,它们使用了Smith-Waterman 算法。全局联配工具有FASTA和GGSEARCH,基于Needleman-Wunsch算法。多序列相似性搜索常用于构建系统发育树,这里不阐述。表二列举了常用的成对序列相似性比对搜索工具
数据结构实验 密码的原理与实现
电气信息学院 实验报告书 课程名称数据结构 实验项目密码的原理与实现 专业班组通信202班 实验时间 2016.12.12 成绩评定 评阅老师 报告撰写人:学号: 电气信息学院专业中心实验室
一、实验内容 利用Visual C++设计合理的凯撒密码,对一段英文段落进行加密处理。以每个人学号的最后两位为key。 英文段落如下: I am Wang Yanling,a student from Sichuan University.Now I major in telecommunication engineering.I am nineteen years old and my family live in Sichuan province.It is the second year of my colleage and I am fighting for my future.I also enjoy playing games,listening to some beautiful music and going out for a date with my friends.How wonderful it is. 二、算法流程图 三、详细设计 源程序: #include
{ while(ch>='A'&&ch<='Z') { return ('A'+(ch-'A'+n)%26); } while(ch>='a'&&ch<='z') { return ('a'+(ch-'a'+n)%26); } return ch; } void menu()/*菜单,1.加密,2.解密,3.退出*/ { printf("\n----------------------"); printf("\n1.Encrypt the file"); printf("\n2.Decrypt the file"); printf("\n3.Quit\n"); printf("------------------------\n"); printf("Please select a item:"); return; } main() { int i,n; char ch0,ch1; FILE *in,*out; char infile[20],outfile[20]; menu(); ch0=getch(); while(ch0!='3') { if(ch0=='1') { printf("\nPlease input the infile:"); scanf("%s",infile);/*输入需要加密的文件名*/ if((in=fopen(infile,"r"))==NULL) { printf("Can not open the infile!\n"); printf("Press any key to exit!\n"); getch(); exit(0); } printf("Please input the key:"); scanf("%d",&n);/*输入加密密码*/
气动执行机构的结构原理
第十九章:气动执行机构检修 一、概述 气动执行器以无油压缩空气为动力,驱动阀门或挡板动作。主要有以下几种类型:气动调节阀、电磁阀、电信号气动长行程执行机构。 二、气动调节阀 气动调节阀由气动执行机构和调节阀两部分组成。气动执行机构以无油压缩空气为动力,接受气信号20~100kpa并转换成位移,驱动调节阀以调节流体的流量。为了改善阀门位置的线性度,克服阀杆的摩擦力和消除被调介质压力变化等的影响,提高动作速度,使用气动阀门定位器与调节阀配套,从而使阀门位置能按调节信号实现正确的定位。 气源质量应无明显的油蒸汽、油和其他液体,无明显的腐蚀气体、蒸汽和溶剂。带定位器的调节阀气源中所含固体微粒数量应小于0.1g/m3,且微粒执行应小于60цm,含油量应小于10 g/m3。 常用的气动调节阀由气动薄膜调节阀和气动活塞调节阀。 ⒈气动薄膜调节阀 气动薄膜执行机构气源压力最大值为500kpa。执行机构分正作用和反作用两种型式,正作用式信号压力增大,调节阀关小,又称气关式;反作用是信号压力增大,调节阀也开大,又称气开式。 ⒉气动活塞调节阀 气动活塞执行机构气源压力的最大值为700kpa。与气动薄膜执行机构相比,在同样行程条件下,它具有较大的输出力,因此特别适合于高静压、高差压的场合。 ⒊气动隔膜阀 气动隔膜阀根据所选择的隔膜或衬里材质的不同,可适用于各种腐蚀性介质管路上,作为控制介质流动的启闭阀。例如,化学水处理程序控制用的阀门,常采用气动隔膜发执行机构并与电磁阀配合,实现阀门的全开或全关控制。 ⒋阀门定位器 有电气信号和气信号两种。 气动阀门定位器与气动调节阀配套使用。定位器的气源压力大小与执行机构的型式及其压力信号范围(或弹簧压力范围)有关。例如ZPQ—01定位器与ZM系列气动薄膜执行机构配套时,若执行机构压力信号范围为0.02~0.1Mpa,则气源压力为0.14Mpa;若压力信号范围为0.04~0.2Mpa,则气源压力为0.28Mpa;若ZPQ—02定位器与ZS—02系列活塞式执行机构配套时,压力信号范围为0.02~0.1Mpa时,气源压力为0.5Mpa。 电信号阀门定位器也可称电-气阀门定位器,可将0~10mA或4~20mA DC电信号转换成驱动调节阀的标准气信号。 ⒌气动保位阀 气动保位阀用于重要的气动控制系统作为安全保护装置。当仪表气源系统发生故障时,它能自动切断调节器与阀门的通路,使阀门保持在原来的位置上。气动保位阀型号为ZPB—201,给定压力调整范围为0.08~0.25Mpa,通道压力为0.02~0.2Mpa。 气动阀门定位器与气动调节阀配套使用。根据气动阀不同每种阀门都有配套的阀门定位器。阀门定位器的气源压力大小与执行机构的型式及其压力信号范围有关(或弹簧压力范围)有关。 三、调试 气动执行器的调试主要任务是吹扫气源管、阀门的动作方向、阀门定位器调整、阀门的线性度调整。