多智能体的阶数
幻方的研究

幻方的研究作者姓名学科专业指导教师培养院系摘要在一个由若干个排列整齐的数组成的正方形中,图中任意一横行、一纵行及对角线的几个数之和都相等,具有这种性质的图表,称为“幻方”。
中国古代称为“河图”、“洛书”,又叫“纵横图”。
本文主要介绍了幻方的起源、解法与应用。
关键词:magic square, magic square solution, application of magic squares.AbstractIn a square consists of several rows of numbers consisting of the figure any of rampant, a longitudinal and a few number of diagonal and are equal, having a chart of this nature, known as the "magic square." Ancient Chinese called "Riverside", "Luo Shu", also called "aspect map."This paper describes the origin and application solution magic square.Key words: key word 1, key word2, key word 3, key word 4幻方的起源幻方的起源幻方(magic square)起源于《易》,古称九宫(龟文),乃是我国最先发现的一个著名组合算题。
《易》算之于九宫,识之以天象,在古代天文、历法、农牧生产与社会生活中具有广泛的应用价值。
易十数为体,八九为用,八九不离十。
《易》九宫算动态组合模型(包括河图、洛书、八卦)是幻方的通解与最简模型[1]。
ANSYS_高级接触问题
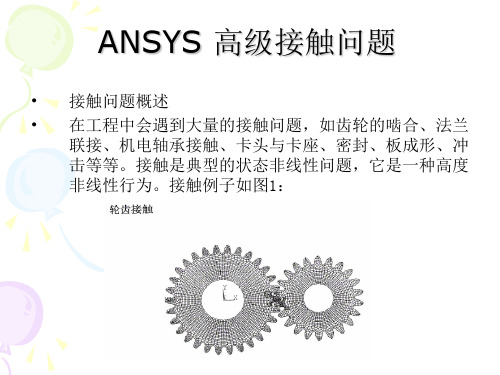
图3-3
• 例:Seal.dat (图3-3) • Step 5. 建立接触面单元 • 设置接触单元属性、选择可变形体表面节点,并在可 变形体上建立接触单元(过程与在可变形体上建立目标单 元相同) Main Menu > Preprocessor > Modeling > Create > Elements > Surf/Contact > Surf to Surf (ESURF) • 这些接触单元与基体有同样的阶数(低阶或高阶)。 • 注意,在壳或梁单元上建立目标单元或接触单元时, 可以选择要在梁或壳单元的顶层还是底层建立单元。
· 接触分析中自动时间步的其它注意事项:
• 与所有其它非线性分析一样,对接触问题,时间步长是非 常有力的提高收敛性的工具。 • 采用足够小的时间步长以获得收敛。 • 对于冲击瞬态分析,必须使用足够数量的计算步以描 述表面间的动量转移。 • 对于路径相关现象(如接触摩擦),相对较小的最大 时间步长对计算精度是必须的。
ANSYS 高级接触问题
• • 接触问题概述 在工程中会遇到大量的接触问题,如齿轮的啮合、法兰 联接、机电轴承接触、卡头与卡座、密封、板成形、冲 击等等。接触是典型的状态非线性问题,它是一种高度 非线性行为。接触例子如图1:
ANSYS 高级接触问题
• 分析中常常需要确定两个或多个相互接触物体的 位移、接触区域的大小和接触面上的应力分布。 • 接触分析存在两大难点: • 在求解之前,你不知道接触区域的范围;表面之 间是接触还是分开是未知的;表面之间突然接触 或突然不接触会导致系统刚度的突然变化。 • 大多数接触问题需要计算摩擦。摩擦是与路径有 关的现象,摩擦响应还可能是杂乱的,使问题求 解难以收敛。
§3 自动时间步、控制
基于时空特征融合的风速预测模型研究

基于时空特征融合的风速预测模型研究目录1. 内容概述 (2)1.1 研究背景与意义 (2)1.2 研究目的 (4)1.3 文献综述 (4)1.4 研究方法 (6)2. 时空特征融合的相关理论与模型介绍 (7)2.1 时空特征的概念 (8)2.2 时空数据分析的基础理论 (9)2.3 目前常用的风速预测模型 (11)2.4 时空特征融合方法与模型架构 (12)3. 数据采集与预处理 (13)3.1 数据收集来源及方法 (14)3.2 数据清洗与规范 (15)3.3 数据的时空特征提取 (17)4. 模型的设计与实现 (19)4.1 设计思路与模型框架 (20)4.2 模型训练与验证 (22)4.3 模型参数与超参数优化 (23)5. 模型性能评估与分析 (25)5.1 模型精度与鲁棒性的评估方法 (26)5.2 不同模型性能对比分析 (27)5.3 时空融合特征对预测精度的影响 (29)6. 基于模型的风速预测应用实践 (30)6.1 实际案例的选取与数据准备 (31)6.2 模型在实际场景中的应用效果 (32)6.3 模型预测结果的验证与误差分析 (33)7. 结语与未来展望 (35)7.1 研究结论 (36)7.2 未来研究展望 (37)7.3 局限性与改进建议 (39)1. 内容概述随着全球气候变化和极端天气事件的增多,风速预测在气象、能源、交通等领域具有重要的实际应用价值。
传统的风速预测方法主要依赖于统计模型和经验公式,这些方法在一定程度上可以满足实际需求,但在复杂多变的气候条件下,其预测精度和可靠性有限。
研究一种基于时空特征融合的风速预测模型具有重要的理论和现实意义。
本研究旨在构建一种基于时空特征融合的风速预测模型,以提高风速预测的准确性和稳定性。
通过对历史风速数据的收集和分析,提取出与风速相关的时间序列特征和空间分布特征。
利用机器学习和深度学习等方法,建立时空特征融合的神经网络模型。
通过实验验证和数据分析,评估模型的预测性能和泛化能力。
室内可见光通信ACO-OFDM系统信道编码性能分析

引用本文:陈鹏远,李明洋,冯满,等.室内可见光通信ACO-OFDM 系统信道编码性能分析[J].光通信技术,2022,46(3)=71-75.室内可见光通信ACO-OFDM 系统信道编码性能分析陈鹏远-,李明洋-,冯满,王裕如-,李萍(1.大连工业大学信息科学与工程学院,辽宁大连116034;2.大连工业大学光子学研究所,辽宁大连116034)摘要:为降低传输信道中障碍物反射对可见光通信产生的干扰和多径效应,首先,搭建了非对称限幅光正交频分复用(ACO-OFDM )仿真模型和信道模型,仿真验证了采用基于正交幅度调制(16QAM )的ACO-OFDM 调制在直射链路和反射链路中回悩均有更好的抗噪性能s 然后,将级联BCH 和卷积码的编码方式加入ACO-OFDM .仿真结果表明:采用级联BCH 码和卷积码的ACO-OFDM 系统具有更高的抗噪性能以及更好的抗干扰性能,改善了可见光通信性能.关键词:非对称限幅光正交频分复用;信道编码;级联BCH 和卷积码中图分类号:TN914文献标志码:A 文章编号= 1002-5561 (2022)03-0071-05D 01:10.13921/ki.issn1002-5561.2022.03.015开放科学(资源服务)标识码!OSID ):筍耀魁Analysis of channel coding performance ofACO-OFDM system for indoor visible light communicationCHEN Pengyuan 1'2, LI Mingyang 1'2, FENG Man 1'2, WANG Yuru 1'2, LI Ping 1'2**收稿日期:2021-12-06。
作者简介:陈鹏远(1997—),男,硕士研究生,现就读于大连工业大学信息科学与工程学院光学工程专业, 主要从事室内可见光通信方面的研究工作,并针对室内可见光通信系统调制方式、信道编码和信道估计内 容进行研究及仿真验证。
计算机应用技术阶段测评
1.单项选择题1.1利用计算机模拟人脑进行演绎推理和采取决策的思维过程,这种计算机应用属于〔〕• a 科学计算• b 数据处理• c 过程控制• d 人工智能考查计算机用途。
人工智能就是用计算机模拟人类的智能活动,包括判断、理解、学习、信息识别、问题求解等,应选D。
1.2为了便于分析和设计,通常用来描述计算机指令的语言是〔〕• a 机器语言• b 高级语言• c 汇编语言• d 自然语言考查计算机语言的根本知识。
机器语言能被计算机直接识别,但全部是二进制代码,不利于分析和设计;高级语音是接近人类思维习惯的语言,同样不利于计算机指令的分析设计;自然语言必须经过算法描述转换为高级语言或汇编语言后才能输入计算机;只有符号化的机器语言即汇编语言最适合计算机指令的分析与设计,应选C。
1.3以下哪个软件不属于操作系统〔〕• a Office• b DOS• c WindowsNT• d Android考查系统软件相关知识,Office属于应用软件中的通用应用软件,不属于系统软件中的操作系统,应选A。
1.4 一个字节由8个二进制位组成,它所能表示的最大的十六进制数为〔〕• a 255• b 256• c 9F• d FF考查二进制根本知识,一个字节最大是11111111,转换为十六进制数是FF,应选D。
1.5以下设备中既是输入设备又是输出设备的是〔〕• a 硬盘• b 鼠标器• c 绘图仪• d 扫描仪考查根本输入/输出〔I/O〕设备,鼠标、扫描仪属于输入设备,绘图仪属于输出设备,磁盘既是输入设备,也是输出设备,应选A。
1.6信息高速公路〞主要表达了计算机在哪方面的开展趋势〔〕• a 巨型化• b 微型化• c 网络化• d 智能化考查计算机开展趋势。
信息高速公路是把信息的快速传输比喻为“高速公路〞,所谓“信息高速公路〞,就是一个高速度、大容量、多媒体的信息传输网络,应选C。
1.7十六进制数58.C的二进制数表示是〔〕• a 1011000.11• b 1000101.01• c 111000.1• d 1101000.11考查数制转换知识,把十六进制数中的每位数字分别转换为四位二进制数即可,结果为01011000.1100,应选A。
六自由度机器人运动学及主要构件的有限元分析

第6期2021年2月No.6February ,2021六自由度机器人运动学及主要构件的有限元分析摘要:文章以六自由度机器人为研究对象,根据实际的作业情况,对机器人进行运动学分析以及主要构件的有限元分析。
运动学分析分为正运动学分析和逆运动学分析,解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
有限元分析主要是机械系统静力学分析。
对主要构件建立模型、模型简化、网格划分,根据危险工况的受力情况,分析了各构件的应力、形变等性能,确保结构设计合理。
对于工业机器人机械结构、传动等方面,运动学和有限元分析能够判断整机设计是否达到设计目标,对结构件的优化设计具有重要的意义。
关键词:六自由度;机器人;运动学;有限元分析中图分类号:TP242.2文献标志码:A 程锴(南京以禾电子科技有限公司,江苏南京210039)作者简介:程锴(1981—),男,江苏南京人,工程师,硕士;研究方向:电子产品总体结构设计。
江苏科技信息Jiangsu Science &Technology Information引言在当前科学技术不断进步和快速发展的背景下,很多先进的技术手段被广泛应用在各个领域中[1]。
特别是机器人在工业中得到广泛的应用,在实际运行过程中,类似于码垛搬运的六自由度机器人在搬运货物中节省大量劳动力,但安全性与可靠性一直备受考验。
因此,本文主要对六自由度机器人进行运动学和静力学分析[2]。
机器人运动学研究解决的是机器人的手臂转向何方,分析的是手部的速度、加速度和位移。
运动学方程是进行机器人位移分析的基本方程,也称为位姿方程。
机器人运动学分为正运动学分析和逆运动学分析。
正运动学是机器人运用各个关节角度、各个构件车长度等已知条件来判断末端执行器在三维空间中的位置;而逆运动学正好相反,它解决的是机器人需要如何运动才能使得末端执行器到达指定位置这一问题。
静力学分析用来分析结构在给定静力载荷作用下的响应。
基于代理模型的优化方法介绍
基于代理模型的优化方法介绍一,代理模型的简介许多工程设计问题,需要通过模拟实验来评估采用不同设计参数时的目标函数和约束函数。
例如,为了找到最佳的机翼形状,常常针对不同的形状参数(长度,曲率,材料等)模拟机翼周围的气流。
对于许多实际问题,单次模拟可能需要数分钟、数小时、甚至数天才能完成。
因此,类似设计优化、设计空间搜索、灵敏性分析和假设分析这种,需要数千、甚至数百万次模拟的任务,直接对原模型求解将是不可能的。
改善这种情况的一个办法就是使用近似模型(被称为代理模型,响应曲面模型,元模型或模拟器)来模拟高精度模拟模型。
代理模型的计算结果与原模型非常接近,但是求解计算量较小。
代理模型采用一个数据驱动的、自下而上的办法来建立。
一般假定原模拟过程的内部精确处理过程未知(有时也可能已知),但是该模型的输入-输出行为则非常重要。
通过在仔细选择的有限个点(输入)计算原模型的响应(输出),从而建立代理模型。
这一过程也被称为行为建模或者黑箱模型,但是这两个名字会造成歧义。
如果只涉及唯一的变量,这一过程也被称为曲线拟合。
二,代理模型的意义代理模型是一种包含试验设计和近似算法的建模技术,在设计优化过程中用代理模型替代原有的高精度分析模型,可以提高仿真优化的寻优效率,降低算法的计算成本。
三,建立代理模型的方法3.1 响应面模型法(Response Surface Methodology)响应面分析法是利用合理的试验设计方法并通过实验得到一定数据,采用多元二次回归方程来拟合因素与响应值之间的函数关系,通过对回归方程的分析来寻求最优工艺参数,解决多变量问题的一种统计方法。
计算原理:由于响应面法描述的是一组独立输入变量与系统输出响应之间某种近似关系,因此通常可用下式来描述输入变量和输出响应之间的关系。
()()εyy~x+=x式中,-响应实际值,是未知函数;-响应近似值,是一个已知的多项式;-近似值与实际值之间的随机误差,通常服从的标准正态分布。
基于Mooney-Rivlin_模型的橡胶件刚度与硬度关联性研究
obtained.
Key words Mooney⁃Rivlin; Rubber hardness; Rubber stiffness; Constitutive model parameters
摘要 为减少橡胶件硬度与刚度匹配过程中的重复试制、原材料浪费问题,开展橡胶件刚度与硬度关联性分析。 以
矩形橡胶弹垫为研究对象,基于单轴压缩及拉伸试验,计算确定 Mooney⁃Rivlin 模型理论参数,以最小二乘法对理论参数
进行验证。 利用 Abaqus 进行橡胶刚度仿真计算,结果表明矩形橡胶弹垫刚度随变形增加而产生非线性增加。 基于橡胶
之间的关联性结论。
关键词 Mooney⁃Rivlin 胶料硬度 橡胶刚度 本构模型参数
中图分类号 TB32
Abstract To reduce the raw material waste problems and repeated trial production in the matching process of rubber parts
NIE ZiHao1,3
(1. Nanjing Tech University Pujiang Institute, Nanjing 211200, China)
(2. Nanjing Tech University, Nanjing 211816, China)
(3. Panyapiwat Institute of Management, Bangkok 11120, Thailand)
有限元分析(FEA)方法PPT课件
(b)定义几何模型 应用实体建模
(c) 用P单元分网。 自适应网格对P方法是无效的
3.施加载荷、求解
应用实体模型加载,而不是有限元模型
求解:推荐采用条件共轭梯度法(PCG),但PCG对于壳体P单元无效
4.后处理 察看结果
有限元分析及应用讲义
举例: platep.dat
20 in
R=5 in
SEQV SMN=773.769 SMNB=708.94 SMX=4421 SMXB=4999
有限元分析及应用讲义
P方法及p单元的应用
P 单元的位移形函数
u=a1+a2x+a3y+a4x2+a5xy+a6y2
v=a7+a8x+a9y+ a10x2+a11xy+a12y2
P方法的优点:
如果使用 p-方法 进行结构分析,可以依靠p单元自动调整单元多项式阶数(2-
– 导出 MeshTool 工具, 划分方式设为自由划 分.
– 推荐使用智能网格划分 进行自由网格划分, 激活它并指定一个尺寸级别. 存储数据库.
– 按 Mesh 按钮开始划分网格. 按拾取器中 [Pick All] 选择所有实体 (推荐).
– 或使用命令 VMESH,ALL 或 AMESH,ALL.
savg = 1100
s = 1000 Elem 1
s = 1100
s = 1200 Elem 2
s = 1300
(节点的 ss 是积分点 的外插)
savg = 1200
7
有限元分析及应用讲义
ANSYS网格误差估计
误差估计作用条件:
• 线性静力结构分析及线性稳态热分析 • 大多数 2-D 或 3-D 实体或壳单元 • PowerGraphics off
自然语言理解LP
语料库示例
北京大学计算语言所富士通人民日报标注语料库样例: 历史/n 将/d 铭记/v 这个/r 坐标/n :/w 北纬/b 41.1 /m 度/q 、/w 东经/b 114.3/m 度/q ;/w 人们/n 将/d 铭记/v 这/r 一/m 时刻/n :/w 1998年/t 1月 /t 10日/t 11时/t 50分/t 。/w ……
解决办法:理性主义方法与经验主义方 法的融合。 符号智能+ 计算智能 理性主义研究方法— 符号处理系统 经验主义研究方法— 基于语言数据的计 算方法 理性主义与经验主义的合谋— 融合方法
二、形式语法
2.1 概述 形式语法理论的目的是试图用精确的数 学模型(形式语言)来刻画自然语言。 与统计语言模型不同的是,对于一个形 式语法体系来说,一个句子是否属于一 种语言,只存在“是”“否”两种答案, 不存在中间状态(概率)
语义学(Semantics)问题:研究如何从 一个语句中词的意义,及这些词在该语 句的句法结构中的作用来推导出该语句 的意义。 语用学(Pragmatics)问题:研究在不同 上下文中语句的应用,以及上下文对语 句理解所产生的影响。
1.4 自然语言理解研究的基本方法
理性主义(规则方法)1960 – 1980中期 基本信念:有限语言规则覆盖无限语言现象。 然而: (1)语言现象无限丰富和动态开放,“规则有 限性和封闭性”受到质疑 (2)随着规则数量增多,可能经常产生规则之 间的矛盾冲突 (3)人工提取规则费时费事,机器提取规则的 质量还难以保证
一切的智能领域里竞争起来。但是,以哪一点作为竞争的出发点呢?
这是一个很难决定的问题。许多人以为可以把下棋之类的极为抽象的 活动作为最好的出发点,不过,我更倾向于支持另一种主张,这种主 张认为,最好的出发点是制造出一种具有智能的、可用钱买到的机器, 然后,教这种机器理解英语并且说英语。这个过程可以仿效小孩子说 话的那种办法来进行。” Turing提出,检验计算机智能高低的最好办 法是让计算机来讲英语和理解英语。他天才地预见到计算机和自然语 言将会结下不解之缘。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多智能体系统中的"阶数"是指系统中参与协作或交互的智能体数量。
在多智能体系统中,阶数可以是任意正整数。
通常情况下,多智能体系统的阶数越高,系统的复杂性和计算难度也
会相应增加。更高的阶数可能需要更多的通信和协调开销,因为智能
体之间的交互关系会变得更加复杂。
例如,一个二阶多智能体系统包括两个智能体之间的协作或竞争,三
阶多智能体系统则包括三个智能体之间的协作或竞争,以此类推。
多智能体系统的研究领域涉及到许多不同阶数的问题,从低阶的双智
能体问题(如博弈论中的两人博弈)到高阶的群体智能问题(如群体
行为建模和优化)等。不同阶数的多智能体系统都有其独特的特点和
挑战,需要采用不同的建模和控制方法来解决。