徕卡电子水准测量计算手薄
徕卡TS09使用说明教学内容
3.3.2 测量放样 (3) 照准目标点,测量,屏幕上显示当前的测量点与待放样点的差值,用户根据这些 信息照准到更正确的位置上,当差值在可容许的范围内时,即可将该点标识到地面 上,然后进行下一点的放样工作,用户还可以将放样的结果记录在:要放样的点 ▲ HZ: b+ 角度偏差: 放样点在目前测量点右侧时为正 ▲ a-距离偏差:放样点在远处时为正 ▲ c-高程偏差:放样点在高处时为正
13
3.3.2 测量放样 (2)在设置好作业后,点F2进入设站界面,可根据现场情况选择方法,常用方 法为坐标定向和后方交会。
1.仪器整平对中完成且测站设定后按与屏 幕对应选项的F3键输入测站点坐标,至 少为XY坐标,如有需要,可输入Z坐标来 测量高程。 2.然后按F4键选择继续输入后视点坐标 并照准后视点后按测存(F1)。
7
3.2 主菜单
功能 测量 程序 管理 传输 配置
工具
说明
程序可立即进行测量。
选择并启动应用程序。
管理作业、数据、格式文件和系统内存等。
输出和输入数据。 更改EDM 配置、通讯参数和一般仪器设 置。
进入与仪器相关的工具,如检查和调校、 自定义启动设置、PIN 码设置、许可码和 系统信息。
8
3.3 测量程序
14
3.3.2 测量放样
3.然后选择F4键计算。 4.然后继续按F4键选择设定。
这样一个平面(空间)坐标网便建立 出来,依据该坐标网可以进行任意点的坐 标测量。
15
3.3.2 测量放样 自由设站,常用于视线限制和空间限制的施工测量。
验收 地面 火炬 时空 间限 制采 用后 方交 会法 进行 测量
16
3.3.2 测量放样
(1) 用户通过程序菜单启动放样程序,进入【放样】设置界面: (2) 点F4开始,进入【放样】主界面:
徕卡DNA03高精度数字水准测量技术
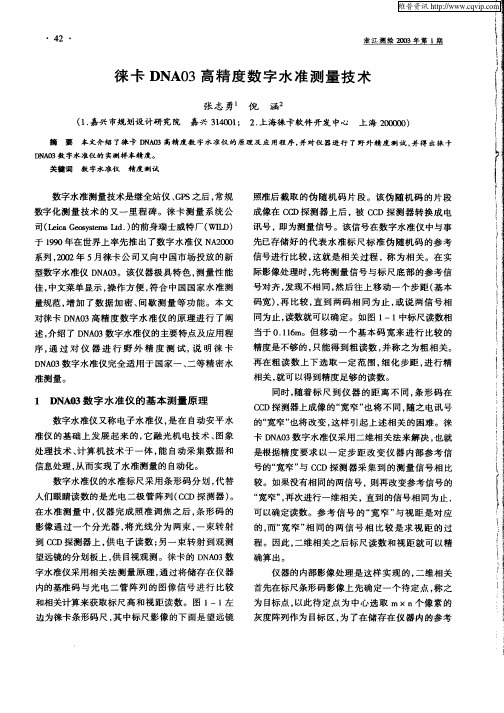
条 形码 影 像被 认 为是 同 名 影 像 ,这 时标 尺 读 数 和 视 距 就 可 以确 定 (如 图 1—2所 示 )。
2 DI 03数 字水准 仪的 主要应 用 程序
仪器 开 机后 ,按 [PROG]功 能 键 ,即可 进 入 应 用 程序菜单 (见 图 1—3)。包 括简便测量 、线路测量和 检 验 调整 。下 面介 绍 主要 的应 用 程 序 。
间歇检测是等级水准测量经 常要做的工作 ,徕 卡 DNA03提 供 了 间 歇 测 量 功 能 。 在 仪 器 内 置 程 序 中 ,间歇 测量 包 括 两 站 间 歇 前 的测 量 — —将 高 程 传 递到 两个 检 查 点 上 。继 续 该 水 准 线 路 测 量 前 必 须 进行的间歇检 查测 量——检 核检查 点 的高程 是否 在 间歇 过程 中发 生 了变 化 。
· 42 ·
维普资讯 垦 坌 堂 生箜 !塑
徕 卡 DNA03高 精 度 数 字 水 准 测 量 技 术
张 志 勇 倪 涵 (1.嘉兴 市规 划 设 计研 究 院 嘉兴 314001; 2.上 海徕 卡 软件 开 发 中心 上 海 200000)
2.2水 准 仪 i角检 校 众所周知 ,水 准测 量 中采用 前 、后 视距相 等 的
方法 ,以消除仪器 i角对观测数据 的影响 ,但在实 际 测 量 中 ,由 于地 形 和 丈 量 等 客 观 条 件 的 限 制 ,不 可 能完 全 遵守 前 后 视 距 相 等 的原 则 。 因此 ,对 水 准 测 量特别是精密水准测量 ,仪器 i角 的大 小和稳定性 是保证水准 测量精 度 的一 个重 要条件 。虽然数 字 水准 仪 具有 将 测 定 的 i角存 入 机 内并 对 所 测 数据 按 该 i角进行 自动修正 的功 能 ,但 仪器 i角受外界 温 度 、湿 度 、振 动 的影 响 而 瞬 时 变 化 仍 然 存 在 ,所 以 用 数字水准仪进行水准测量时也必须经常对仪器 i角
feica 徕卡测量系统 说明书

测量&工程部©Leica Geosystems AG 版权所有 所有的说明及描述及技术数据,如有变动,恕不另行通知。
编号:NL20041208_CN徕卡测量系统 附件快讯 – No.1TCA 测量机器人棱镜徕卡测量系统为测量机器人——TCA 全站仪配备有轻巧的无源反射棱镜。
为了避免对棱镜是否朝向仪器的担心, 我们推荐使用360˚棱镜。
360˚棱镜由6片单棱镜组合而成。
这样的设计可以使来自任何方向的测量光束返回到发射的仪器处。
棱镜的六角形配置确保从任何方向观测,其棱镜改正常数及精度都一样。
徕卡测量系统有以下 360˚ 棱镜可供选用:1. GRZ4 360º 棱镜这款棱镜推荐给所有测量机器人全站仪使用,该棱镜一般安装在棱镜杆上,棱镜上下有橡胶垫保护,以免在棱镜倾倒时损坏。
发货时棱镜装在有填充物的箱内,以方便运输。
使用 GRZ4 棱镜的总体精度为5mm 。
当直接瞄准某一片棱镜时可以优于2mm 的精度。
在顶部的橡胶上有黄色箭头用于人工照准时使用。
2. GRZ121 360º 精密棱镜对于机械控制,精确的高程测定是非常关键的。
使用 GRZ121, 高程测量的精度可达2mm 。
使用带螺丝的夹具把棱镜固定在棱镜托上。
稳固的安置棱镜可以适应高低不平的机械控制应用工程。
3. GRZ101 360º 微型棱镜这款尺寸小、价格便宜的微型棱镜最高点位测量精度可达1.5mm 。
但在TPS 进行超级搜索及ATR 测量时作用范围受限,比标准棱镜作用范围要小。
GRZ101 同时配置四节棱镜杆、两个尖脚和一个水准器。
使用 GAD103 适配器可以把微型棱镜安装在任意Wild Stub 的棱镜杆上。
这个适配器提供了恰当的偏量改正,以便在棱镜杆上直接读取棱镜的高度。
其它品牌的360º 棱镜非法仿制徕卡测量系统专利产品 360˚ 棱镜设计的产品在市场上可以见到。
除了违反专利法,这些仿制的棱镜质量低劣。
瑞士徕卡高精度电子水准仪DNA03

四川省第一测绘工程院瑞士徕卡高精度电子水准仪DNA03及配件采购项目一、我单位拟购置瑞士徕卡高精度电子水准仪DNA03及配件6台(套)。
每单台(套)配置如下表。
二、服务要求:
1、在货物交付地对所供量仪器进行仪器操作、软件安装与使用、仪器硬件维护等项目的系统培训,培训时间由需方安排,培训发生的费用由供方自理。
2、货物交付后需试用6个月,试用到期无质量问题,全部货款一次性付清。
3、质量保证期内如仪器及配件有质量问题或发生故障供方必须保证在24小时内进行处理。
4、供方负责将设备运至需方所在地,在途设备的风险由供货方负责。
三、产品技术指标。
电子水准仪相差较大的三种自动电子读数方法 水准仪如何操作

电子水准仪相差较大的三种自动电子读数方法水准仪如何操作在建筑工程、修建道路、桥梁等测量水平高处与低处时我们会用到电子水准仪,这是特别好的测量仪器,精度高、使用便利、快速牢靠。
而且依据不同的测量精度,电子水准仪可分在建筑工程、修建道路、桥梁等测量水平高处与低处时我们会用到电子水准仪,这是特别好的测量仪器,精度高、使用便利、快速牢靠。
而且依据不同的测量精度,电子水准仪可分为一般电子水准仪和精密电子水准仪,可广泛用于大面积场地测量、楼面水平线标志、沉降观测等。
电子水准仪使用方法:1、未知两点间,摆开三脚架,从仪器箱取出水准仪安置在三脚架上,利用三个机座螺丝调平,使圆气泡居中,跟着调平管水准器。
注意水平制动手轮是调平的,在水平镜内通过三角棱镜反射,水平重合,就是平水。
2、将望远镜对准未知点上的塔尺,再次调平管水平器重合,读出塔尺的读数(后视),把望远镜旋转到未知点的塔尺,调整管水平器,读出塔尺的读数(前视),记到记录本上。
3、将仪器摆在两固定点中心,标出两点的水平线,称为a、b 线,移动仪器到固定点一端,标出两点的水平线,将望远镜横丝对准偏差一半的数值。
用校针将水准仪的上下螺钉调整,使管水平泡吻合为止。
重复以上做法,直到相等为止。
电子水准仪接受了原理上相差较大的三种自动电子读数方法:1、相关法(徕卡NA3002/3003)2、几何法(蔡司DiNi10/20)3、相位法(拓普康DL101C/102C)接受这几种读数方法紧要是由于:1、读数客观:不存在误差、误记问题,没有人为读数误差。
2、精度高:视线高和视距读数都是接受大量条码分划图象经处理后取平均得出来的,因此减弱了标尺分划误差的影响。
多数仪器都有进行多次读数取平均的功能,可以减弱外界条件影响。
不娴熟的作业人员业也能进行高精度测量。
3、速度快:由于省去了报数、听记、现场计算的时间以及人为出错的重测数量,测量时间与传统仪器相比可以节省1/3左右。
4、效率高:只需调焦和按键就可以自动读数,减轻了劳动强度。
徕卡NA2水准仪

徕卡NA2水准仪徕卡(Leica)是一家德国高科技公司,成立于1914年,专业生产和销售高品质的光学、仪器和测量系统。
其中,徕卡NA2水准仪是一种高精度的测量工具,被广泛应用于土木工程、测绘、建筑以及城市规划等领域。
本文将从以下几个方面介绍徕卡NA2水准仪。
产品概述徕卡NA2水准仪的主体为一台旋转水平仪,它以高精度的水平仪管为基础,在借助于显微镜或者摄影记录仪的辅助下,可以实现非常高精度的测量。
其精度超过了以往的水准仪,并且使用起来更加方便,广泛应用于各种需要垂直或水平测量的场合。
它能够用于高度的测量、工程测量和地形测量等领域。
产品特点1.高精度:徕卡NA2水准仪的精度非常高,它能够在20毫米的距离内提供高度的精准测量。
2.方便使用:徕卡NA2水准仪使用起来非常方便,只需要简单的操作就能够完成高精度的测量。
3.多功能:徕卡NA2水准仪能够用于测量任何水准线的位置,包括铁路、高速公路、隧道等建设工程。
4.轻便:徕卡NA2水准仪的重量轻盈,方便使用者携带。
使用方法1.校准:在使用徕卡NA2水准仪之前,需要进行校准。
首先,将水准仪放置在一个横平坦的表面上,在动手柄上旋木螺钉,将气泡测量管调成水平状态。
这样,就可以开始进行测量了。
2.测量:在进行测量前,需要先选定一条基准线,然后从这条基准线开始向两侧进行测量。
可以使用显微镜或者摄像机来记录数据。
3.计算:在完成测量之后,需要对数据进行计算。
根据高程差计算出高连线,然后利用水准面进行计算,就可以得到各点高度之间的差异。
应用场景1.铁路工程:徕卡NA2水准仪是铁路工程的重要工具之一,可以用来测量铁轨的高度,确保铁路的平稳和安全。
2.高速公路建设:在高速公路建设中使用NA2水准仪可以测量路面的高度,保证高速公路的顺畅和安全。
3.建筑工程:在建筑工程中,NA2水准仪可以用来计算楼层之间的高度差异,确保灵活的设计。
4.城市规划:徕卡NA2水准仪可以用于城市规划中的高程测量,计算房屋和建筑之间的高度差异。
徕卡测量
徕卡测量 解决方案 本地化应用软件及解决方案 TPS 应用软件/方案 高速铁路精高速铁路精测控制网的布设和测量1 高速铁路控制网精度控制标准为保证旅客列车高速运行时的安全性和舒适度,铁路轨道的平顺度是重要指标。
轨道平顺度包含线路方向和纵向方向两个分量,线路方向的不平顺是指钢轨头内侧与钢轨方向垂直的凸凹不平顺。
高速铁路平顺度要求在线路方向每10米弦实测正矢与理论正矢之差为2毫米。
线路平顺度的要求和控制测量的精度有一定的关系,对于线路形状来说,平顺度只是一种局部误差。
不能依线路平顺度的要求作为控制测量的精度标准。
因为,平顺度对线路位置误差的影响有积累性和扩大的趋势,当实际线路偏离设计位置很远时,线路仍旧可以满足平顺度要求。
1.1短波平顺度对线路位置的影响现以直线线路讨论,当在10米处产生2㎜不平顺度时,线路将出现转折角为(82.5″),直线B 移至B′点。
每个不平顺度具有偶然性,因此,由各段不平顺度产生的点位移按偶然误差计算,设AB 为150米,则 =127㎜。
短波不平顺累计误差示意图1.2 长波平顺度对线路位置的影响长波平顺度要求,150米处不大于10㎜,当在150米处产生10㎜不平顺度时,线路将出现转折角为(27.5″)。
设AB 为900米,则 M β=147㎜。
虽然如此,如果仅仅控制轨道的平顺度,在达到要求的情况下,轨道的整体线形总是不能保证。
由上可知,在客运专线无砟轨道的施工过程当中,仅仅控制轨道的平顺度是不够的,我们还需要建立无砟轨道施工测量控制网来实现轨道的总体线形的正确。
1.3 CP Ⅰ和CP Ⅱ误差计算通过无砟轨道施工中轨道对平顺度的相关要求,我们可以反推出CP Ⅰ和CP Ⅱ控制网的相关精度要求。
CP Ⅰ和CP Ⅱ最弱点的横向中误差计算按导线测量方法,计算最弱点的横向中误差公式为:相关下载高速铁路精测控制网设和测量DOC 文档《客运专线无砟轨道铁路工程测量暂行规定》中要求的各级平面控制网级别测量方法测量等级点间距备注CPⅠGPS B级≥1000m≤4㎞一对点CPⅡGPS C级800~1000m 导线四等CPⅢ导线五等150~200m后方交会50~60m 10~20m一对点K对于CPⅠ,取S=4000m,则可计算得M K=11.6㎜。
天宝(Trimble)5700徕卡(Leica)1230比较
天宝(Trimble)5700主机、天线、电台、手簿(含RTK软件)和后处理软件(TGO)均由美国Trimble 导航公司自行研制开发,这就确保了天宝的GPS性能非常的稳定,整体效果极佳。
1、建立在天宝公司专利的“MAXWELL4”GPS核心芯片上开发的全新低功耗接收机。
具有极高的卫星捕获速度和数据计算速度,跟踪性能更优精度也更高。
2、内置RTK接收电台,基准站和流动站可互换。
内置高性能20MHz带宽的UHF无线电,具有多达20个频段。
3、大容量的存储卡。
高达128M的内置存储卡,能够存储3400小时以上的静态数据。
4、高速USB端口。
每秒高于1兆的速度向PC机传输数据,比最快的串口还要快十倍。
5、先进的电源管理。
使用内置的两块微型可携式电池,充一次电就可以工作一整天。
6、水中漂浮,抗1米水泥地面坠落Trimble Zephyr型天线具有优于扼流圈天线的优异性能,亚毫米级的相位中心重复性,更好的低高度角跟踪能力,采用天宝新的隐形抑径板和右旋极化技术可显著削弱地面的多路径影响。
天宝公司自行研制生产的Trimmark3电台,频道间隔可设为12.5或25 kHz,可选功率:2, 10, 25瓦。
19200 波特率空中传播,可连续使用2个中继站。
重量轻,全密封,防水。
前面板可设置电台,显示状态信息。
能通过WinFLASH 来设计频点。
1、手簿控制器是一个独立的计算机,512M内存,CPU为206MHz2、带有背光的TFT真彩触摸屏和键盘、实时图形显示。
彩色屏幕即使在强烈的太阳光下也十分的清晰。
3、无线连接。
基于Windows 操作系统,可以在野外通过手机上网传送文件。
4、内置扬声器和麦克风。
可在现场记录语音信息。
5、预留蓝牙接口可利用蓝牙技术和任何具有蓝牙功能的设备进行无线通信。
1、 Trimble Survey Controller软件以图为中心,全图显示。
实时的图形显示方便您快速的访问数据和测量放样。
电子水准仪二等水准测量
4、设置线路
选择“线路”。
观察措施:
➢ BF ➢ aBF ➢ BFFB ➢ aBFFB ➢ 单程双转点
输入线路名。
线路名 观察措施 起始点号 起始点高程
选择测量措施。 输入起点点号。
指定标尺
指定标尺可不输。
【新线路】 Name: Meth: PtID: Ho: Stf1:
Stf2:
搜索 返测 LINE00001
自定义键功能 点号增长步长
回车,即如测量 界面。
瞄准水准尺,按 仪器侧面红色测量按 钮,进行测量。
回车。
作业员名称
注释
日期时间
【选择作业】
Job:
123
Oper:
-------
Cmt1:
-------
Cmt2:
-------
18.11.2023 10:41:17 增长
【新作业】
Job:
------
Oper:
-------
Cmt1:
-------
Cmt2:
-------
18.11.2023 10:41:17
功能
按FNC键,调出功能菜单。 测试:只测不统计。 查看:显示最终一次测量成果。 编码:输入编码。 点号:输入运营自动点号旳起始 值和递增量。 输入:人工输入测量值。水准尺 读数和距离。 选择 4 (点号)
【功能】
1 测试 2 查看 3 编码 4 点号
5 输入
【点号】
Running PtID
aBFFB A1
0.00000 m
-------------
5、设置限差
【设置限差】 1/2
值
选择“限差”。
Precise :
徕卡超站仪应用手册(新)
突破传统作业模式 引领测量新技术
目录/CONTENTS
02 了解超站仪 (SmartStation)
03 应用示例
示例1 地形测量 示例2 城市公用事业设备测量 示例3 大型建筑工地中的放样
06 定向方法
方法1 利用一个已知点 (已知后视 点) 进行定向 方法2 利用一个未知坐标点进行定 向 (设置方位角) 方法3 利用一个或多个已知点定向 并利用其中的一个或多个点的高程 来确定测站高程 (定向及高程传递)
Sma在需要之 处安置SmartStation,并用RTK测定点位。
在P1点处安置仪器,并用RTK测定其位 置坐标。在P2点处安置仪器,用RTK测 定点位并以P1为后视点进行定向。此 时,可在P2点进行放样。
以这一方法建立工作点对或点组,放样 工作可基于这些点对或点组进行。由于 是通过RTK测定点位,对这些点或点组 间并不需要应用全站仪进行观测连接。
初始 Hz=0
坐标北
最终 Hz=0
差值
P1
P2 坐标值 以后测定
初始 最终
-07-
方法3 利用一个或多个已知点定向并利用其中的一个或多个点的高程来确定 测站高程(定向及高程传递)
本方法与方法1相似,但本方法提供了 下述可能:
定向点可以是1个或多个(最多为10 个)。
从1个或多个控制点中可推算出测站 高程(从控制点传递高程)。
10 数据处理
后处理代替RTK
了解超站仪 (SmartStation)
在SmartStation中,SmartAntenna安装于 TPS1200/1200+全站仪上。SmartStation操作员可全方 位地操纵设备并进行观测。SmartStation特别适合在手 动操作的全站仪上使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②后1.360351.36028前1.506811.50683后-前-0.14646-0.146550.00009 ∑h-0.14646-0.14655后1.380631.38065前1.353291.35331后-前0.027340.027340.00000 ∑h-0.11912-0.11921后1.362511.36252前1.518701.51875后-前-0.15619-0.156230.00004 ∑h-0.27531-0.27544后1.316411.31579前1.499161.49915后-前-0.18275-0.183360.00061 ∑h-0.45806-0.45880
超限检核合 格234点号测 自仪 器温 度天 气测站编号18.0917.4917.32-0.53-0.540.4136.5772.14107.32129.52合 格徕卡DNA03电子水准测量计算手薄1合 格合 格清晰稳定1左累计高差∑h-0.45843后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
17.8621.4810.840.9411.3734 累计视距差∑d0.88视距差d10.8817.8418.73-0.14651-0.119170.60
-0.27538
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d后1.346851.34679前1.255351.25558后-前0.091500.091210.00029 ∑h-0.36656-0.36759后1.276071.27591前1.313611.31359后-前-0.03754-0.037680.00014 ∑h-0.40410-0.40527后1.402741.40268前1.320831.32089后-前0.081910.081790.00012 ∑h-0.32219-0.32348后1.411751.41174前1.300601.30058后-前0.111150.11116-0.00001 ∑h-0.21104-0.21232
合 格合 格
合 格000000A2567合 格219.61247.96152.22189.7450.806780.391.791.080.7119.0018.5211.5513.6414.640.491.2914.7115.22-0.58-0.2116811.15-0.36708-0.40469-0.32284
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d后1.412931.41293前1.326181.32621后-前0.086750.086720.00003 ∑h-0.12429-0.12560后1.436031.43660前1.310741.31068后-前0.125290.12592-0.00063 ∑h0.001000.00032
合 格000000A18合 格271.45299.570.1914.580.9511.84-1.0491013.541.9811.65-0.124950.00066
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者:至日 期观测方法成 像云 量风向风速土 质太阳方向
下丝下丝上丝上丝基本分划辅助分划①②①-②
超限检核点号测 自仪 器温 度天 气测站编号徕卡DNA03电子水准测量计算手薄清晰稳定1左累计高差∑h后视距离aBFFB0坚实前视距离徕卡DNA03 No.338270标尺读数BSIII01330℃晴累计视距∑D
BSIII0182012 年 8 月 26 日前尺方向及尺号后尺基+K
减辅
累计视距差∑d视距差d
观测者:记录者:检查者: