实验四机构运动参数测试
实验四机构运动参数测试
一、实验目的
1.通过运动参数测试实验,掌握机构运动的周期性变化规律,并学会机构运动参数如位移、速度和加速度(包括角位移、角速度和角加速度)的实验测试方法;
2.通过利用传感器、工控机等先进的实验技术手段进行实验操作,训练掌握现代化的实验测试手段和方法,增强工程实践能力;
3.掌握原动件运动规律不变,改变机构各构件尺寸,从动件运动参数的测量方法;
4.通过进行实验结果和理论数据的比较,分析误差产生的原因,增强工程意识,树立正确的设计理念。
二、实验装置
1.实验装置的组成
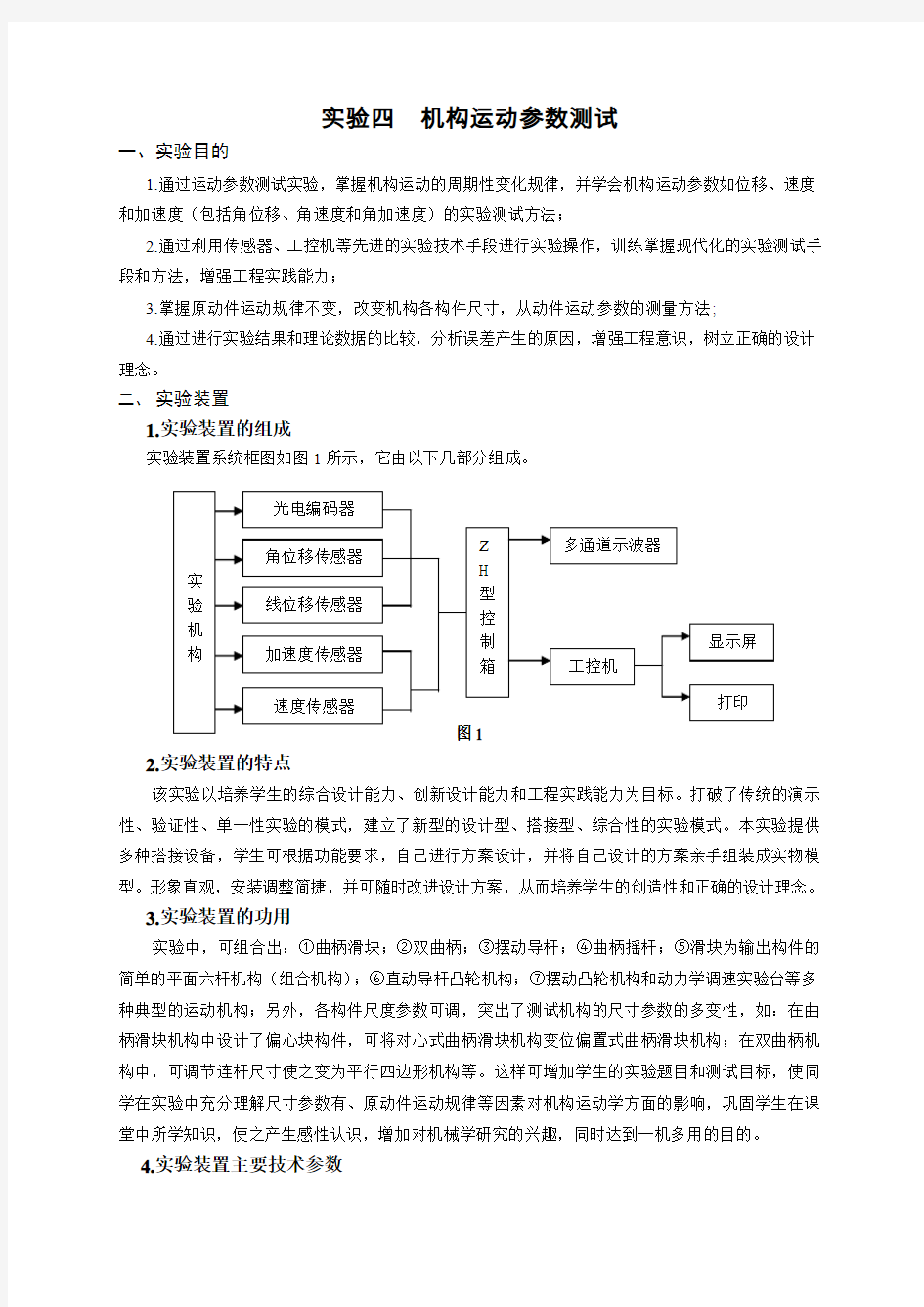
实验装置系统框图如图1所示,它由以下几部分组成。
2.实验装置的特点
该实验以培养学生的综合设计能力、创新设计能力和工程实践能力为目标。打破了传统的演示性、验证性、单一性实验的模式,建立了新型的设计型、搭接型、综合性的实验模式。本实验提供多种搭接设备,学生可根据功能要求,自己进行方案设计,并将自己设计的方案亲手组装成实物模型。形象直观,安装调整简捷,并可随时改进设计方案,从而培养学生的创造性和正确的设计理念。
3.实验装置的功用
实验中,可组合出:①曲柄滑块;②双曲柄;③摆动导杆;④曲柄摇杆;⑤滑块为输出构件的简单的平面六杆机构(组合机构);⑥直动导杆凸轮机构;⑦摆动凸轮机构和动力学调速实验台等多种典型的运动机构;另外,各构件尺度参数可调,突出了测试机构的尺寸参数的多变性,如:在曲柄滑块机构中设计了偏心块构件,可将对心式曲柄滑块机构变位偏置式曲柄滑块机构;在双曲柄机构中,可调节连杆尺寸使之变为平行四边形机构等。这样可增加学生的实验题目和测试目标,使同学在实验中充分理解尺寸参数有、原动件运动规律等因素对机构运动学方面的影响,巩固学生在课堂中所学知识,使之产生感性认识,增加对机械学研究的兴趣,同时达到一机多用的目的。
4.实验装置主要技术参数
(1)电机额定功率和电机转速
机构运动参数测试实验装置电机参数:
功率:40W。
电机转速:1300r/min。
直齿轮减速箱速比:1:20。
(2)传感器
①线位移传感器(1个):
型号:WDL—100—2 ;精度:独立线性度0.5% ;量程:100mm;
②角位移传感器(1个):
型号:WD35D—4 ;精度:独立线性度0.1% ;量程:00—3400;
③光电编导器(1个):
型号:LEC—102.4BM—G05E ;精度:1024脉冲/周;量程:00—3600;
(3)实验装置主要构件和部件基本参数
①机构运动参数测试实验装置电机支撑件:1个。
②底板:460×330×30mm。
③曲柄:L50(L35):1个;L90(L50):2个。
④连杆:L30 :1个;L160:2个;L90:1个。
⑤支撑座组件:中心高120mm支撑座2个。
⑥摆动导杆:1个。
⑦滑块组件:1套。
⑧传感器支撑架:角位移传感器支撑架:1个;线位移传感器支撑架:1个;光电移传感器
支撑架:1个。
⑨凸轮:1个。
⑩直动从动构件组件:1套。
○11摆动从动构件:1个。
○12偏心调整块:4个。
○13偏心块:2块。
(4)实验装置所需主要设备:
实验装置电器控制箱:1个。
(5)实验所需工具:
①木榔头:1把;②棍搬子:6#(1个);③小改锥:1把;④活搬子:1把;⑤钢板尺:1把。
三、实验数据采集系统软件说明
该实验采用美国NI(美国国家仪器公司NA TIONAL INSTRUMENTS,简称NI)数据采集卡,进行数据采集;利用LabVIEW图形化编程平台进行数据处理和图形输出。其数据采集原理为:首先,机构在电机的驱动下运转起来,用传感器(位移传感器、角位移传感器、光电传感器)将机械量(如:
位移、加速度)转变为电量,即电信号。其次,通过测试控制柜中的数据采集卡对该信号进行采集、分析,再将模拟量转变为数字量,即完成模—数转换。最后,通过LabVIEW进行程序处理将其转化为运动曲线并输出在计算机的屏幕上。
LabVIEW和以往那些基于文本的高级编程语言不同,它采用的是一种全新的数据流图编程方式,即用形象的图标和连线来代替一行一行的文本,这种“画”程序的方法非常符合科学家和工程师所习惯和常用的框图模块方法及思维方式。并且,LabVIEW还具有大量的的特殊功能,是所有传统高级编程语言不具备的,在LabVIEW中可直接调用编写好的MA TLAB代码,不必重写程序;同样,在LabVIEW中还可以调用C语言编写的程序;此外,LabVIEW中还提供方便和实用的网络测量数据传输、远程测量控制等网络功能。
在我们的实验测试中正是利用了LabVIEW的数据输入输出、数学运算、图像处理输出、函数运算等功能模块和“画”程序的特点,由学生自行进行数据采集、数据处理、图形输出的编程。这样一来,首先可以开发学生各自的主观能动性和创新思维模式,其次,可以让学生通过实验熟悉LabVIEW软件的一些常用功能和程序的编写方法,掌握先进的测试方法和手段。
(1)测试控制柜的使用方法和操作说明(LabVIEW 7 Express 程序设计)
A、启动数据采集向导[DAQ Assistant]
1)接通电源,启动计算机,进入Windows[开始]界面。
2)双击[NI LabVIEW 7.1]图标,进入LabVIEW启动界面。
3)单击[New...],进入新建程序界面。
4)选择[Data Acquisition with NI-DAQmx .vi],单击[OK],自动建立
[DAQ Assistant]图标,并进入前面板[Front Panel]设计界面。
LabVIEW启动界面
B 、前面板设计
1) 在前面板区域,单击右键,显示控制[Controls]模板。
控制模板
2)选择[Graph Inds]图标内含的[Graph]图标,拖至前面板适当位置后单击,即可建立一个波
形显示器。若要建立数字显示器,选择[Num Inds]图标内含的[Num Ind]图标。
波形显示器
3)显示器大小可通过拖动边框上的兰色方块进行调整。 4)双击显示器左上角标签内容,可修改显示名称。
C 、程序框图设计
新建程序界面
前面板设计界面
1)在状态栏单击[Blok...]图标,进入[Blok Diagram]程序框图设计界面。
[Blok Diagram]程序框图设计界面
2)双击[DAQ Assistant]图标,进入数据采集向导界面。
数据采集向导界面
●选择[Analog Input]→[Voltage],输入模拟量为电压信号。
●选择输入通道[ai 0]至[ai 7],单击[Finish]按钮,进入任务设置界面。
任务设置界面
●设置电压输入范围,信号连接方式(差动或单端),采样方式、速度等。
●单击[Test]按钮,可进行信号采集、显示。
●单击[OK],任务设置完毕,返回程序框图设计界面。
3)在程序框图空白处单击右键,显示[Functions]功能选择框。
功能选择界面
4)选择[Arith/compare] 数学运算图标,其中包括[Time Domain]时域运算,可进行信号的
微分[Differential]、积分[Integral]等运算。还包括[Numeric]数字运算,可进行加、减、乘、除、开方、倒数等运算以及设置[Num const]常数图标。
5)选图标在框图中排列整齐后,用光标靠近图标的输出端,光标自动变为接线工具,单击左
键即可将导线连接到另一图标的输入端。
程序实例
6)光标指到连线,单击右键,在下拉菜单中可选择[Create Wire Branch]建立分支。也可将
连线直接引至另一连线,自动合并连接。
7)用光标选择某个对象,按[Del]键即可删除。
D、运行程序
1)单击[Front Panel],返回前面板,单击[Run]按钮,运行程序。
2)单击[STOP]按钮,程序停止运行,数据采集显示如图。
更多的LabVIEW 7 Express程序设计方法可参考[Help]。
数据采集显示
下面是曲柄滑块机构运动参数,按照上述步骤进行操作并将运动线图输出的例子。
双击桌面上的“机构运动参数测试”进入数据采集程序界面(如图2)。点击程序界面中的相应运动参数测试功能按扭(如:曲柄滑块),进行数据采集程序运行后可见实时数据采集信号。
图2 数据采集程序界面数据采集显示
(2)数据输出方式
当采用“数据采集和分析系统”进行数据输出时,学生可通过人—机交互界面进行数据采集,系统将对当前采样数据文件进行分析计算,并将分析结果以运动曲线图(S---φ,v---φ,a ---φ运动曲线图)的方式显示在波形显示窗口中,同时保存分析结果(用屏幕硬拷贝方式,按下PrtScr 键即可)方便以后分析,并可将其打印出来,以便和理论曲线进行比较。 三、实验内容和步骤
1、曲柄摇杆机构实验
1)被测对象基本参数
曲柄摇杆机构如图所示,各杆长度如下:
曲柄:l AB =50mm (35mm ); 连杆:l BC =160mm ; 摇杆:l CD =90mm (50mm );机架 :l AD =180mm ;曲柄转速 n 1=65r/min
2)测试内容
一个运动循环内,摇杆角位移θ、角速度ω和角加速度ε和机构位置(曲柄转角1?)之间关系,并给制θ-1?、ω-1?和ε-1?线图。
改变构件尺度参数后,再进行测试。(自选) 3)实验步骤 ①实验原理图:
曲柄摇杆机构实验原理图 ②实验步骤:
a .确定所选机构中构件的尺寸,正确搭接机构;
b .按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确;
c .打开计算机电源运行采集程序;
d .由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
e .调整曲柄长度或摇杆长度,重复第三项内容;
f .分别整理实验各项运动曲线数据,填写实验报告;
g .实验报告填写前应事先根据已知尺寸算出θ、ω、ε的值并画出当曲柄30°时的运动线图。 4)问题讨论
①改变连杆尺寸从动件运动规律是否发生变化? ②实验的测试数据和计算数值,有哪些误差的影响因素?
2、曲柄滑块机构实验
1)被测对象基本参数
曲柄滑块机构如图所示,各杆长度如下:
曲柄:l AB =50mm (35mm );连杆:l BC =160mm ;偏距:e =20mm ;曲柄转速:n 1=65r/min ;
2)测试内容
一个运动循环内,滑块位移S 、速度v 和加速度a 和机构位置(曲柄转角1?)之间关系,并绘制S-1?、v-1?和a -1?线图。
改变构件尺度参数后,再进行测试。(自选) 3)实验步骤 ①实验原理图:
曲柄滑块机构实验原理图 ②实验步骤:
1.确定所选机构中构件的尺寸,正确搭接机构;
2.按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确; 3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出; 5.调整曲柄长度,重复第三项内容;
6.调整滑块机架高度e=20mm ,并将曲柄调整为50mm 重复第三项内容; 7.分别整理实验各项数据,填写实验报告;
8.实验报告填写前应事行根据已知尺寸算出S 、v 、a 的值,并画出运动线图。 4)问题讨论
①改变连杆尺寸从动件运动规律是否发生变化? ②曲柄滑块机构的急回特性是如何产生的?
③实验的测试数据和计算数值,误差多大?有哪些影响因素?
3、双曲柄机构实验
1)被测对象及基本参数
双曲柄机构如图所示,各杆长度如下:
主动曲柄l AB =50mm (35mm );从动曲柄l CD =90mm (50mm ); 连杆l BC =90mm ;机架l AD =30mm ;曲柄AB 转速n 1=65r/min ; 2)测试内容
一个运动循环内,从动曲柄CD 的角位移θ、角速度ω和曲柄AB 转角1? 关系,并给制θ-1?、ω-1?图。
改变构件尺度参数后,再进行测试。(自选) 3)实验步骤
双曲柄机构实验原理图 ②实验步骤:
1.确定所选机构中构件的尺寸(先选第一组数据),正确搭接机构; 2.按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确; 3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;。
5.调整曲柄长度为35mm 重复第三项内容; 6.整理实验各项数据,填写实验报告;
7.实验报告填写前应事先根据已知尺寸算出θ、ω的值并画出运动线图。 4)问题讨论
①改变机构中其它杆件尺寸,从动件运动规律是否发生变化? ②双曲柄机构有哪几种特性?
4、摆动导杆机构实验
1)被测对象基本参数
摆动导杆机构如图所示,各杆
l AB =50mm (35mm );机架 l AC =150mm ;曲柄转速 n 1=65r/min ;
2)测试内容
一个运动循环内,摆杆角位移θ、角速度ω和角加速度ε和机构位置(曲柄转角1?)之间关系,并给制θ-1?、ω-1?和ε-1?线图。
改变构件尺度参数后,再进行测试。 3)实验步骤
摆动导杆机构实验原理图 ②实验步骤:
1.确定所选机构中构件的尺寸,正确搭接机构;
2.按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确; 3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出; 5.调整曲柄长度,重复第三项内容。
6.分别整理实验各项运动曲线,填写实验报告。
7.实验报告填写前应事先根据已知尺寸算出θ、ω、ε的值并画出当曲柄每30°时的运动线图。
4)问题讨论
①改变曲柄尺寸从动件运动规律是否发生变化?为什么? ②实验的测试数据和计算数值,有哪些误差的影响因素?
5、直动从动件凸轮机构实验
1)被测对象基本参数
直动凸轮机构如图所示,各参数如下:
对心式 :基圆半径 r o =40mm ;行程:h =20mm ; 推杆的推程、回程均为等加等减速运动规律。 推程运动角Φ=150°;远休止角Φs =30°;
回程运动角Φ’=150°;近休止角Φ’s=30°。 凸轮转速:n 1=35r/min ;偏距 e =20mm (自选); 2)测试内容
一个运动循环内,从动推杆的位移S 、速度和加速度a 和机构位置(凸轮转角1?)之间关系,并绘制S-1?、v-1?和a -1?运动线图。
改变构件尺度参数后,再进行测试。(自选) 3)实验步骤 ①实验原理图:
直动从动件凸轮机构实验原理图 ②实验步骤: a .正确搭接机构;
b .按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确;
c .打开计算机电源运行采集程序;
d .由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
e .对机构进行调整使之变为偏心距为e=20的偏置凸轮机构,(可左偏、右偏)比较从动件运动规律的变化,重复第三项内容进行测试;
f .更换从动构件型式(换为平底和滚子),重复第三项内容进行测试;(自选)
g .整理实验各项运动曲线,填写实验报告。 4)问题讨论
①改变从动构件后,从动件运动规律是否发生变化?为什么? ②实验的测试数据和计算数值,误差多大?有哪些影响因素?
6、摆动从动件凸轮机构实验
1)被测对象基本参数
摆动从动件凸轮机构如图所示,各参数如下: 从动件最大摆角m ax ?=30°;
摆杆推程的运动方向和凸轮的转向相反。
基圆半径r 0=40mm ;凸轮的升程运动角Φ=150°; 远休止角Φs =30°; 回程运动角Φ’=120°;
摆杆升程、回程均为等加等减速运动规律;
摆杆长l AB =165mm ,初位角m ax ?=30°,凸轮转速n 1=35r/min 。 2)测试内容
一个运动循环内,摆杆的角位移θ、角速度ω和角加速度ε的实测值及其相应的θ-1?、ω-1
?和ε-1?线图。
更换摆杆形式后,再进行测试。(自选) 3)实验步骤 ①实验原理图:
摆动从动件凸轮机构实验原理图 ②实验步骤: 1.正确搭接机构;
2.按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确; 3.打开计算机电源运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出; 5.更换从动构件型式(换为平底和滚子),重复第三项内容进行测试(自选)。 6.整理实验各项运动曲线,填写实验报告。 4)问题讨论
①改变从动构件后,从动件运动规律是否发生变化?为什么? ②实验的测试数据和计算数值,误差多大?有哪些影响因素?
7、平面六杆机构实验
1)被测对象基本参数
六杆机构如图所示,各杆长度如下:
主动曲柄 L AB =50mm (35mm );
连杆 L BC =90mm (30mm ); 从动曲柄 L CD =90mm (50mm ); 连杆 L CE =160mm ;机架 L AD =30mm ; 曲柄转速 n 1=65r/min ; 2)测试内容
①一个运动循环内,滑块位移S 、速度v 和加速度a 的和机构位置(曲柄转角1?)之间关系,并绘制S-1?、v-1?和a -1?线图。
②一个运动循环内,曲柄CD 的角位移θ、角速度ω和角加速度ε和曲柄AB 转角1?关系,并给出θ-1?、ω-1?和ε-1?线图。 改变构件尺度参数后,再进行测试。 3)实验步骤 ①实验原理图:
六杆机构实验原理图 ②实验步骤: 原始各构件尺寸
曲柄50mm ,连杆90mm ,从动曲柄90mm ,机架30mm ,滑块连杆60mm ,n 1=65r/min ; 1.正确搭接机构;
2.按实验测试原理图连接计算机和控制箱,仔细检查实验线路是否正确; 3.打开计算机,运行采集程序;
4.由指导教师检查无误后,打开控制箱电源(黑色按钮,顺时针转动为开),按动电机启动按钮(绿色)电机正常运转后,试运转后停车,开始采集数据,并进行运动线图输出;
5.调整曲柄长度35mm 、或连杆长L=30、或滑块偏心e=20mm ,分别重复第三项内容进行测试; 6.整理实验各项运动曲线,填写实验报告;
7.实验报告填写前应事先根据已知尺寸算出S 、v 、a 和θ、ω、ε的值,并画出运动线图。 4)问题讨论
①改变机构中其它构件尺寸,从动件运动规律是否发生变化?为什么?
②双曲柄机构有几种特性?不同类型对执行构件滑块的运动规律有无影响?为什么?
③实验的测试数据和计算数值,误差多大?有哪些影响因素?
机构运动参数测试实验报告
一、实验目的
二、被测对象名称、原始数据及检试项目;
三、实验装置原理框图;
四、根据机构尺寸计算的理论值(计算公式及结果);
五、实验数据记录及结果(建议以表格及线图形式表达);
六、实验结果分析(如误差产生原因分析等);
七、实验问题讨论及收获;
.
Testbed静态测试使用指南V1.1
目录 1Testbed功能介绍 (1) 1.1编程规则验证 (1) 1.2数据流分析 (1) 1.3控制流分析 (1) 1.4表达式分析 (2) 1.5接口分析 (2) 1.6软件质量度量分析 (2) 2使用Testbed 进行编码规则的定制和检查 (3) 2.1确定测试需求 (3) 2.2建立测试工程 (3) 2.3定制代码分析规则 (6) 2.4配置Report选项 (7) 2.5分析执行及结果查看 (8) 3结果分析及测试报告编写 (9) 3.1质量度量信息的获取 (9) 3.2程序质量度量报告单 (11) 3.3静态分析质量报告单 (12) 附录A:静态分析推荐规则使用说明 (1)
1Testbed功能介绍 1.1编程规则验证 编程标准验证是高可靠性软件开发不可缺少的软件质量保证方法,使用LDRA Testbed 自动地验证应用软件是否遵循了所选择的编程规则。编程规则由软件项目管理者根据自身项目的特点并参考现有的成熟的软件编程标准制定,如DERA(欧洲防务标准),MISRA(汽车软件标准),LDRA Testbed依据此规则搜索应用程序,并判断代码是否违反所制定的编程规则。LDRA Testbed报告所有违反编程规则的代码并以文本方式或图形反标注的方式显示。测试人员或编程人员可根据显示的信息对违反编程规则的代码进行修改。 1.2数据流分析 LDRA Testbed分析软件中全局变量、局域变量及过程参数的使用状况,并以图形显示、HTML或ASCII文本报告方式表示,清晰地识别出变量使用引起的软件错误,此种方法既可使用于单元级,亦可使用于集成级、系统级。 通过Testbed数据流分析功能,可方便地分析出软件中一些可能的程序欠缺,如: 1.没使用的函数参数; 2.不匹配的参数; 3.变量未赋初值就引用; 4.代码中有多余变量; 5.给值传递参数赋值; 6.无返回值的函数路径; 7.函数的实参是全局变量。 1.3控制流分析 控制流分析检查以下内容: 1.不可达代码; 2.不合理的循环结构; 3.存在浮点相等比较; 4.函数存在多个出口; 5.函数存在多个入口。
交流参数的测定三表法
实验八 交流参数的测定——三表法、三电流表法 一、实验目的 ⒈ 学习用交流电压表、交流电流表和功率表组成的三表法测量元件的交流等效参 数的方法。 ⒉ 学习用三电流表法测量元件的交流等效参数的方法。 ⒊ 学习使用功率表。 二、原理与说明 ⒈ 三表法 ⑴ 用三表法测量交流电路的参数 在交流电路中,元件的阻抗值或无源一端口网络的等效阻抗值,可以用交流电压表、交流电流表和功率表分别测出元件(或网络)两端的电压U 、流过的电流I 和它所消耗的有功功率P 之后,再通过计算得出,其关系式为: 阻抗的模 U Z I = 功率因数 cos P UI λ?== 等效电阻 cos P UI λ?== 等效电抗 sin X Z ?= 或 2L X X fL π== , 1 2c X X fC π== 这种测量方法简称为三表法,它是测定交流阻抗的基本方法。 ⑵ 判断阻抗性质的方法 元件的阻抗性质有容性或感性,用三表法测得的U 、I 、P 的数值还不能判别被测阻抗属于容性还是感性,一般可以用以下方法加以确定。 ① 在被测元件两端并接一只适当容量的试验电容器,若电流表的读数增大,则被测元件为容性;若电流表的读数减小,则为感性。 试验电容的电容量C '可根据下列不等式选定: 2B B '<
式中B ¢为试验电容的容纳,B 为被测元件的等效电纳。 ② 利用示波器观察阻抗元件的电流及端电压之间的相位关系,电流超前电压为容性,电流滞后电压为感性。 ③ 电路中接入功率因数表或数字式相位仪,从表上直接读出被测阻抗的cos ?值或阻抗角,读数超前为容性,读数滞后为感性。 ⑶ 三表法的接线方式 前述交流参数的计算公式是在忽略仪表内阻的情况下得出的,和伏安表法类似。三表法有两种接线方式,如图8-1所示。若考虑到仪表的内阻,测量结果中显然存在方法误差,必要时需加以校正。对于图8-1(a )的电路,校正后的参数为 2 I I P R R R R I '=-= - I I X X X X '=-= 式中,R 、X 为校正前根据测量计算得出的电阻值和电抗值;I R 、I X 为电流表线圈 及功率表电流线圈的等效电阻值和等效电抗值。 图8-1 (a) (b) 对于图8-1(b )电路,校正后的参数为 2U U P G G G G U '=-= - 一般情况下,电压表和功率表电压支路的电抗可以忽略,因此 B B '==式中G 、B 为校正前根据测量计算得出的电导值和电纳值;U G 为电压表线圈及功率表电压线圈支路并联的等效电导。 ⒉ 三电流表法 实验电路如图8-2所示,以电压为参考正弦量,该电路的相量图如图8-3所示。
机构参数测试实验
实验四机构运动参数测试 机构运动参数测试实验以曲柄摇杆机构、曲柄滑块机构、双曲柄机构和凸轮机构等典型运动机构作为被测对象。 本着理论联系实际的作法,在实验中必须将实验检测结果与理论数据进行对比,并从中分析实验误差产生的原因及其主要影响因素。因此,实验前大都需要按实验指导书规定的待定检测对象及其原始数据,通过在计算机上进行理论计算,求解理论数据,然后方可进行实验。 在进行实验操作之前,需要通过阅读实验装置的使用说明书,熟悉实验装置的工作原理和仪器仪表的使用操作方法。然后才能进行独立实验操作。 一、实验目的 1、通过运动参数测试实验,掌握机构运动的周期性变化规律,并学会机构运动参数如:位移、速度和加速度(包括角位移、角速度和角加速度)的实验测试方法; 2、通过利用传感器、工控机等先进的实验技术手段进行实验操作,熟悉LabVIEW软件的一些常用功能和程序的编写方法,训练掌握现代化的实验测试手段和方法,增强工程实践能力; 3、通过进行实验结果与理论数据的比较,分析误差产生的原因,增强工程意识,树立正确的设计理念。 二、实验装置及工具 1、实验装置的组成 (1)实验装置的特点 该实验以培养学生的综合设计能力、创新设计能力和工程实践能力为目标。打破了传统的演示性、验证性、单一性实验的模式,建立了新型的设计型、搭接型、综合性的实验模式。本实验提供多种搭接设备,学生可根据功能要求,自己进行方案设计,并将自己设计的方案亲手组装成实物模型。形象直观,安装调整简捷,并可随时改进设计方案,从而培养学生的创造性和正确的设计理念。 (2)实验装置的功用 实验中,可组合出:①曲柄滑块;②双曲柄;③摆动导杆;④曲柄摇杆;⑤滑块为输出构件的简单的平面六杆机构;⑥直动从动件凸轮机构;⑦摆动从动件凸轮机构实验台等多种典型
机构设计技术机构运动与力参数测试实验报告
机构运动与力参数测试实验报告 院、系专业班级姓名同组人 实验日期年月日 一、机构运动方案设计(绘制机构运动简图,简要说明其结构特点和工作原理及使用场合) 结构特点:上图实际为曲柄滑块机构,曲柄滑块机构具有的运动副为低副(上图机构有一组皮带轮构成的高副),构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度等优点。
工作原理:此机构常用于将曲柄得回转运动变换为滑块的往复直线运动,或者将滑块的往复直线运动转换为曲柄滑块运动,上图为前者。其工作原理为:由电动机带动皮带轮5顺时针转动,从而带动结构3转动,再通过连接在齿轮上的连杆2带动滑块1做往复直线运动。适用场合:自动送料机构、机床、内燃机、空气压缩机等。 二、绘制平面机构的运动学曲线s、v和a曲线。 三、根据数据曲线分析搭建的机构,包括是否有运动冲击,运行状况如何。并分析波动、冲击、不稳定的原因。 根据搭建机构及数据曲线分析,运动有几个局部位置有运动冲击,但对整体影响不大,运动
状况较为顺利。 1.根据角位移分析,可看出角速度线并不是水平直线,而是有一个微小的上下跳动的幅度。其产生的原因可能是本身频率不稳定,或者是滑块来回摩擦系数不一致产生。 2.根据直线位移曲线图,可看出位移曲线并不是光滑的曲线,在波峰跟波谷都有一段是直线。与直线的末端相连的曲线一开始便有较大的斜率,这会对测量器材造成一定的冲击,同时也造成机构的不稳定。排除构件连接之间的偏差,为了更好测量滑块的往复运动,而不导致滑块卡死;连接滑块的测量器材在连接点有较大的松弛度,从而导致滑块在最左端和最有端有一段测量的空窗期,导致不能测量进而产生速度曲线的波峰、波谷有一段直线。 四、测量各构件尺寸,利用机械原理知识编程绘制所搭建机构的运动学曲线,求解各杆件的轴向力,并分析误差产生的原因。
DAC静态参数测试
第四章 DAC 静态电参数测试 本文要点: DAC 电参数义的定 DAC 规静态电参数测试计常方法及算公式 DAC 测试统系的典型硬件配置 DAC 数规据范(Data Sheet)样例 选择输码减如何入代以少DAC 测试时间的 如何提高DAC 电参数测试的精度及稳定性 关键词释解 调误失差Eo(Offset Error)转换线实际值与值值:特性曲的起始理想起始(零)的偏差。 误增益差E G (Gain Error)转换线实际与资:特性曲的斜率理想斜率的偏差。(在有些料误称为满误上增益差又刻度差) 线误性差Er(Linearity Error)转换线与拟线间:特性曲最佳合直的最大偏差。(NS 公司义定)或者用:准确度E A (Accuracy 转换线与转换线):特性曲理想特性曲的最大偏差(AD 义公司定)。 线误微分性差E DL (Differential Linearity Error)值满值围内邻输:在起始到刻度的范相入数码对应拟输电压实际值与的模出之差的1LS 值简单说个理想得最大偏差。的,就是在整转换围内范每一步距(1LSB)的最大偏差。 满围刻度范(FSR):DAC 输电压围的出范。 最小有效位(LSB):DAC 输变时输电压变入化一位,出的化量。 单调性(Monotonic):DAC 输号个变时输个变的入信朝一方向化,出也向一方向化或保持常量 分辨率(Resolution):DAC 总的输数义为入位,定2 n 一、 DAC 静态电参数义测试简定及介 在图4.1中,Summing Junction 和 I out 连没电过电端接在一起,如果有流流阻R∑输,电压出Vout 为电压当零刻度;DAC 电过电的最大流流阻R∑输电压,出Vout 为满电压刻度。
交流电路参数的测定实验报告
交流电路参数的测定实验报告 一、实验目的: 1.了解实际电路器件在低频电路中的主要电磁特性,理解理想电路与实际电路的差异。明确在低频条件下,测量实际器件哪些主要参数。 2.掌握用电压表、电流表和功率表测定低频元件参数的方法。 3.掌握调压变压器的正确使用。 二、实验原理: 交流电路中常用的实际无源元件有电阻器、电感器和电容器。 在低频情况下,电阻器周围的磁场和电场可以忽略不计,不考虑其电感和分布电容,将其看作纯电阻。可用电阻参数来表征电阻器消耗电能这一主要的电磁特征。 电容器在低频时,可以忽略引线电感,忽略其介质损耗和漏导,可以用电容参数来表征其储存和释放电能的特征。 电感器的物理原型是导线绕制成的线圈,导线电阻不可忽略,在低频情况下,线匝间的分布电容可以忽略。用电阻和电感两个参数来表征。 交流电流元件的等值参数R、L、C可以用专用仪器直接测量。也可以用交流电流表、交流电压表以及功率表同时测量出U、I、P,通过计算获得,简称三表法。 本实验采用三表法,由电路理论可知,一端口网络电压电流及 将测量数据分别记入表一、表二、表三。每个原件各测三次,求其平均值。 三、仪器设备
1.调压变压器 2.交流电压表 3.功率表 4.交流电流表 5.电感电容电阻。 四、注意事项: 1.测量电路的电流限制在1A以内。 2.单相调压器使用时,先把电压调节手轮调在零位,接通电源后再从零位开始升压。每做完一项实验随手把调压器调回零再断开电源。 六、报告要求: 根据测试结果,计算各元件的等效参数,并与实际设备参数进行比较。 五、思考题 若调压变压器的输出端与输入端接反,会产生什么后果,
机构运动实验方案设计
机构运动实验方案设计 机构运动设计是根据机械的设计任务和要求,拟定机械中各机构的方案,。XX为大家收集整理的机构运动实验方案设计,喜欢的小伙伴们不要错过啦。 机构运动实验方案设计1 1、掌握机构运动参数测试的原理和方法。了解利用测试结果,重新调整、设计机构的原理。 2、体验机构的结构参数及几何参数对机构运动性能的影响,进一步了解机构运动学和机构的真实运动规律。 3、熟悉计算机多媒体的交互式设计方法,实验台操作及虚拟仿真。独立自主地进行实验内容的选择,学会综合分析能力及独立解决工程实际问题的能力,了解现代实验设备和现代测试手段。 1、曲柄滑块机构及曲柄摇杆机构类型的选取。 2、机构设计,既各杆长度的选取。 3、动分析。 4、分析动态仿真和实测的结果,重新调整数据最后完成设计。 平面机构动态分析和设计分析综合实验台,包括:曲柄滑块机构实验台、曲柄摇杆机构实验台,测试控制箱,配套的测试分析及运动仿真软件,计算机。 1、曲柄摇杆机构综合试验台
①曲柄摇杆机构动态参数测试分析:该机构活动构件杆长可调、平衡质量及位置可调。该机构的动态参数测试包括:用角速度传感器采集曲柄及摇杆的运动参数,用加速度传感器采集整机振动参数,并通过A/D板进行数据处理和传输,最后输入计算机绘制各实测动态参数曲线。可清楚地了解该机构的结构参数及几何参数对机构运动及动力性能的影响。 ②曲柄摇杆机构真实运动仿真分析:本试验台配置的计算机软件,通过建模可对该机构进行运动模拟,对曲柄摇杆及整机进行运动仿真,并做出相应的动态参数曲线,可与实测曲线进行比较分析,同时得出速度波动调节的飞轮转动惯量及平衡质量,从而使学生对机械运动学和动力学,机构真实运动规律,速度波动调节有一个完整的认识。 ③曲柄摇杆机构的设计分析:本试验台配置的计算机软件,还可用三种不同的设计方法,根据基本要求,设计符合预定运动性能和动力性能要求的曲柄摇杆机构。另外还提供了连杆运动轨迹仿真,可做出不同杆长,连杆上不同点的运动轨迹,为平面连杆机构按运动轨迹设计提供了方便快捷的虚拟实验方法。 2、曲柄滑块机构综合试验台 ①曲柄滑块动态参数测试及分析:该机构活动构件杆长可调、平衡质量及位置可调,该机构的动态参数测试包括:用角速度传感器采集曲柄滑块的运动参数,用加速度传感器
机械运动参数测定
第一章实验综述 1.1 实验目的 1. 通过实验了解位移、速度、加速度、位移、角速度、角加速度测定方法。 2. 通过实验初步了解“MEC—B机械动态参数测定试仪”即光电脉冲编码器、同步脉冲发生器(或称角度传感器)的基本原理,并掌握它们的使用方法。 3. 通过实验曲线和理论曲线的比较,分析产生差异的原因,增加对速度、角速度、特别是加速度、角加速度的感性认识。 4. 运用MATLAB与ADAMS2005进行动态仿真,比较两种仿真方法的结果,并且熟悉两种试验方法的使用; 5. 运用matlab软件编程,对两种机构进行运动仿真,得出速度、加速度等参数。 6. 将所得两种参数进行比对,进行分析。 1.2 实验步骤 1. 安装运动机构的运动副,组装曲柄滑块机构; 2. 打开运动测试软件,打开电机开关,让电机带动曲柄滑块运动; 3. 修改软件测试的脉冲当量,对滑块的路程、速度、角速度、加速度进行测试,并形成数据曲线, 脉冲当量计算式: C= D/N 其中:C—脉冲当量 D—槽轮槽底圆直径(现配D=28.7mm) N—光电脉冲编码器每周脉冲数,(现配N=1000); 4. 组装曲柄导杆机构,重复上述步骤测量运动参数。 1.3 实验原理 1. 实验机构 目前配套的为曲柄滑块机构及曲柄导杆机构(也可采用其它各种实验机构),机械原动力采用直流调速电机,电机转速可在0—3600转/分范围内作无级调速。经蜗轮蜗杆减速器减速,机构的曲柄转速为0~120转/分。
图1-1与1-2所示为实验机构简图。它利用作往复运动的滑块,推动光电脉冲编码器,输出与滑块位移相当的脉冲信号,经测试仪处理后即可得到滑块的位移、速度和加速度。图1-1为曲柄滑块机构,图1-2为曲柄导杆机构。 图表 1 曲柄滑块机构 图表 2 曲柄连杆机构 1、同步发生器 2、蜗轮减速器 3、曲柄 4、连杆 5、电机 6、滑块 7、齿轮 8、光电脉冲编码器 9、导块 10、导杆 2. 广电脉冲编码器 图表 3 光点脉冲编码器结构原理图 1、灯泡 2、聚光镜 3、光电盘 4、光拦板 5、主轴
交流电路参数的测定三表法的实验原理
交流电路参数的测定三表法的实验原理 1.交流电路元件的等值参数R,L,C可以用交流电桥直接测得,也可以用交流电压表、交流电流表和功率表分别测量出元件两端的电压U、流过该元件的电流I和它消耗的功率P,然后通过计算得到。后一种方法称为“三表法”。“三表法”是用来测量50Hz频率交流电路参数的基本方法。 如被测元件是一个电感线圈,则由关系 可得其等值参数为 同理,如被测元件是一个电容器,可得其等值参数为 2.阻抗性质的判别方法。如果被测的不是一个元件,而是一个无源一端口网络,虽然从U,I,P三个量,可得到该网络的等值参数为R=|Z|cos,X=|Z|sin,但不能从X的值判断它是等值容抗,还是等值感抗,或者说无法知道阻抗幅角的正负。为此,可采用以下方法进行判断。 (1)在被测无源网络端口(入口处)并联一个适当容量的小电容。在一端口网络的端口再并联一个小电容C'时,若小电容C'=Zsinr,a,视其总电流的增减来判断。若总电流增加,则为容性;若总电流减小,贝刂为感性。图1(a)中,Z为待测无源网络的阻抗,C'为并联的小电容。图1(b)是图1(a)的等效电路,图中G,B为待测无源网络的阻抗Z的电导和电纳,B'为并联小电容C'的电纳。在端电压有效值不变的条件下,按下面两种情况进行分析: ①设B+B'=B",若B'增大,B"也增大,则电路中电流I单调地增大,故可判断B为容性。 ②设B+B'=B",若B'增大,而B"先减小再增大,则电流I也是先减小再增大,如图2所示,则可判断B为感性。 由以上分析可见,当B为容性时,对并联小电容的值C'无特殊要求;而当B为感性时,B'<|2B|才有判定为感性的意义。B'>|2B|时,电流单调增大,与B为容性时相同,但并不能说明电路是感性的。因此, B'<|2B|是判断电路性质的可靠条件。由此可得定条件为
实验4指导书 交流参数的测定(电工)
交流参数的测定 一、实验目的 1.研究电阻、感抗、容抗与频率的关系,测定其随频率变化的特性曲线。 2.掌握交流数字仪表(电压表、电流表、功率表)和交流自耦调压器的使用方法。 3.掌握使用交流电压表、电流表、功率表(即三表法)测量交流电路中的阻抗及元件参数的方法。 4.学习电抗容性、感性性质的判定方法。 二、实验预习 打印实验指导书,预习实验内容,了解本实验的目的、原理和方法。 三、实验设备与仪器 NEEL-II 型电工电子实验装置。 四、实验原理 1.单个元件阻抗与频率的关系。 对于电阻元件,根据?∠=0R R R I U ,其中R I U =R R ,电阻R 与频率无关; 对于电感元件,根据L L L j X I U = ,其中fL X I U π2L L L ==,感抗X L 与频率成正比; 对于电容元件,根据 C C C j X I U -= ,其中fC X I U π21C C C = =,容抗X C 与频率成反比。 图1 阻抗频率特性测量电路
测量元件阻抗频率特性的电路如图1所示,图中的r 是提供测量回路电流用的标准电阻,流过被测元件的电流(R I 、L I 、C I )则可由r 两端的电压r U 除以r 阻值所得,又根据上述三个公式,用被测元件的电流除对应的元件电压,便可得到R 、L X 和C X 的数值。 2.交流电路的参数测量方法。 正弦交流电路中各个元件的参数值,可以用交流电压表、交流电流表及功率表,分别测量出元件两端的电压U ,流过该元件的电路I 和其所消耗的功率P ,然后通过计算得到元件的各参数值,这种方法称为三表法,是用来测量50Hz 交流电路参数的基本方法。计算的基本公式为: 电阻元件的电阻:R R I U R = 或2I P R = 电感元件的感抗:L L L I U X = ,电感f X L L π2= 电容元件的容抗:C C C I U X = ,电容C fX C π21 = 串联电路复阻抗的模I U Z =,阻抗角R X arctg =? 其中,等效电阻2 I P R =,等效电抗22 R Z X -= 功率因数UI P = ?cos 在RLC 串联电路中,各元件电压之间存在相位差,电源电压应等于各元件电压的向量和,而不能用它们的有效值直接相加。 电路功率用功率表测量,本实验使用数字式功率表,其电流测量端子与负载串联,电压测量端子与负载并联,电流测量端子和电压测量端子的同名端(标有*号)必须连接在一起,测量电路如图2所示,连接方法如图3所示。 图2 交流电路参数测量电路
实验六 凸轮机构实验
实验六 凸轮机构实验 一、实验目的 1.熟悉凸轮机构的结构组成,学会控制并观察它们的运动过程; 2.掌握机构运动参数测试的原理和方法,了解两种机构从动件位移、速度、加速度的变化规律。 二、实验设备及工具 1.凸轮机构实验台; 2.活动扳手,固定扳手,内六角扳手,螺丝刀,钢直尺。 三、 实验台结构及工作原理 1.凸轮机构实验台 凸轮机构实验台,由盘形凸轮、圆柱凸轮和滚子推杆组件构成,提供了等速运动规律 、等加速等减速运动规律、多项式运动规律、余弦运动规律、正弦运动规律、改进等速运动规律、改进正弦运动规律、改进梯形运动规律等八种盘形凸轮和一种等加速等减速运动规律的圆柱凸轮供检测使用,可拼装平面凸轮和圆柱凸轮两种凸轮机构。 主要构件尺寸参数如下: 盘形凸轮:基圆半径为 mm R 400= 最大升程为 mm H 15max = 圆柱凸轮:升程角为 150=α 升程为 mm H 5.38= 2.数据采集系统 实验台采用单片机与A/D 转换集成相结合进行数据采集,处理分析及实现与PC 机的通信,达到适时显示运动曲线的目的。该测试系统先进、测试稳定、抗干扰性强。同时该系统采用光电传感器、位移传感器作为信号采集手段,具有较高的检测精度。数据通过传感器与数据采集分析箱将机构的运动数据通过计算机串口送到PC 机内进行处理,形成运动构件运动参数变化的实测曲线,为机构运动分析提供手段和检测方法。 本实验台电机转速控制系统有两种方式:手动控制:通过调节控制面板上的液晶调速菜
单调节电机转速。软件控制:在实验软件中根据实验需要来调节。其原理框图如下: 四、注意事项 1.机构运动速度不易过快。 2.机构启动前一定要仔细检查联接部分是否牢靠;手动转动机构,检查曲柄是否可整转。 3.运行时间不宜太长,隔一段时间应停下来检查机构联接是否松动。 4.因振动和干扰等原因,采集曲线会有毛刺。 六、实验报告及思考题 1.选取合理的数据,绘制凸轮机构的从动件运动规律曲线(主动件旋转一周,从动件的位移、速度、加速度的变化规律)。 2.试举两个例子说明凸轮机构各有何运动特点?并说明其结构组成。
实验一 单级放大电路静态参数的测试
实验一 单级放大电路静态参数的测试 (验证性实验) 一、实验目的 1. 熟悉模拟电子技术实验箱的结构,学习电子线路的搭接方法。 2. 学习测量和调整放大电路的静态工作点,观察静态工作点设置对输出波形的影响。 二、实验仪器 1. 低频信号发生器 SG1026 1台 2. 双踪示波器 SS7802或COS5020BF 1台 3. 万用表 VC9802A 1块 三、实验说明 图1为电阻分压式工作点稳定单管放大器实验电路图。它的偏置电路采用RB1和RB2组成的分压电路,并在发射极中接有电阻RE ,以稳定放大器的静态工作点。当在放大器的输入端加入输入信号ui 后,在放大器的输出端便可得到一个与ui 相位相反,幅值被放大了的输出信号u0,从而实现了电压放大。 图1 共射极单管放大器实验电路 在图1电路中,旁路电容CE 是使RE 对交流短路,而不致于影响放大倍数,耦合电容C1和 C2 起隔直和传递交流的作用。当流过偏置电阻RB1和RB2 的电流远大于晶体管T 的基极电流IB 时(一般5~10倍),则它的静态工作点可用下式估算 CC B2 B1B1 B U R R R U +≈ U CE =U CC -I C (R C +R E ) C E BE B E I R U U I ≈-≈
电压放大倍数 be L C V r R R β A // -= 输入电阻 R i =R B1 / R B2 / r be 输出电阻 R O ≈R C 由于电子器件性能的分散性比较大,因此在设计和制作晶体管放大电路时,离不开测量和调试技术。在设计前应测量所用元器件的参数,为电路设计提供必要的依据,在完成设计和装配以后,还必须测量和调试放大器的静态工作点和各项性能指标。一个优质放大器,必定是理论设计与实验调整相结合的产物。因此,除了学习放大器的理论知识和设计方法外,还必须掌握必要的测量和调试技术。 放大器的测量和调试一般包括:放大器静态工作点的测量与调试,消除干扰与自激振荡及放大器各项动态参数的测量与调试等。 放大器静态工作点的测量与调试 1) 静态工作点的测量 测量放大器的静态工作点,应在输入信号ui =0的情况下进行, 即将放大器输入端与地端短接,然后选用量程合适的直流毫安表和直流电压表,分别测量晶体管的集电极电流IC 以及各电极对地的电位UB 、UC 和UE 。一般实验中,为了避免断开集电极,所以采用测量电压UE 或UC ,然后算出IC 的方法,例如,只要测出UE ,即可用 E E E C R U I I =≈算出IC (也可根据C C CC C R U U I -=,由UC 确定IC ), 同时也能算出UBE =UB -UE ,UCE =UC -UE 。 为了减小误差,提高测量精度,应选用内阻较高的直流电压表。 2) 静态工作点的调试 放大器静态工作点的调试是指对管子集电极电流IC (或UCE )的调整与测试。 静态工作点是否合适,对放大器的性能和输出波形都有很大影响。如工作点偏高,放大器在加入交流信号以后易产生饱和失真,此时uO 的负半周将被削底,如图2(a)所示;如工作点偏低则易产生截止失真,即uO 的正半周被缩顶(一般截止失真不如饱和失真明显),如图2(b)所示。这些情况都不符合不失真放大的要求。所以在选定工作点以后还必须进行动态调试,即在放大器的输入端加入一定的输入电压ui ,检查输出电压uO 的大小和波形是否满足要求。如不满足,则应调节静态工作点的位置。 (a) (b) 图2 静态工作点对uO 波形失真的影响 改变电路参数UCC 、RC 、RB (RB1、RB2)都会引起静态工作点的变化,如图3所示。但通常多采用调节偏置电阻RB2的方法来改变静态工作点,如减小RB2,则可使静态工作点提高等。
实验四 单相变压器的参数测定 (4)
实验四 单相变压器的参数测定 一、实验目的 通过空载和短路实验测定变压器的变比和参数。 二、实验项目 1. 空载实验 测取空载特性U 0=f(I 0),P 0=f(U 0) , cosφ0=f(U 0)。 2. 短路实验 测取短路特性U K =f(I K ),P K =f(I K ), cosφK =f(I K )。 三、实验方法 1. 实验设备 D33、D32、D34-3、DJ11 图1 空载实验接线图 2. 空载实验 1)在三相调压交流电源断电的条件下,按图1接线。I 0选用0.3A 档,U 0选用100V 档。被测变压器选用三相组式变压器DJ11中的一只作为单相变压器,其额定容量 P N =77W ,U 1N /U 2N =220/55V ,I 1N /I 2N =0.35/1.4A 。变压器的低压线圈a 、x 接电源,高压线圈A 、X 开路。 2)选好所有电表量程。将控制屏左侧调压器旋钮向逆时针方向旋转到底,即将其调到输出电压为零的位置。 A X
3)合上交流电源总开关,按下“开”按钮,便接通了三相交流电源。调节三相调压器旋钮,使变压器空载电压U 0=1.2U N ,然后逐次降低电源电压,在1.2~0.2U N 的范围内,测取变压器的U 0、I 0、P 0。 4)测取数据时,U=U N 点必须测,并在该点附近测的点较密,共测取数据7-8组。记录于表1中。 5)为了计算变压器的变比,在U N 以下测取原方电压的同时测出副方电压数据也记录于表1中。 3. 短路实验 1)按下控制屏上的“关”按钮,切断三相调压交流电源,按图2接线(以后每次改接线路,都要关断电源)。将变压器的高压线圈接电源,低压线圈直接短路。I k 选用1A 档,U k 选用100V 档。
交流电路元件参数的测定
深圳大学实验报告 课程名称:电路与电子学 实验项目名称:交流电路元件参数的测定 学院:信息工程学院 专业:无 指导教师:吴迪 报告人:王文杰学号:2013130073 班级:信工02 实验时间:2014/5/22 实验报告提交时间:2014/5/26 教务部制
一、实验目的与要求: 1.正确掌握交流数字仪表(电压表、电流表、功率表)和自耦调压器的用法。 2.加深对交流电路元件特性的了解。 3.掌握交流电路元件参数的实验测定方法。 二、方法、步骤: 电阻器、电容器和电感线圈是工程上经常使用的基本援建。在工作频率不高的条件下,电阻器、电容器可视为理想电阻和理想电容。一般电感线圈存在较大电阻,不可忽略,故可用一理想电感和理想电阻的串联作为电路模型。 电阻的阻抗为:Z=R 电容的阻抗为:Z=jX C=-j(1/ωC) 电感线圈的阻抗为:Z=r+ jX L=r+jωL=|Z|∠ 电阻器、电容器、电感线圈的参数可用交流电桥等一起测出,若手头没有这些设备,可大减一个简单的交流电路,通过测阻抗算出元件参数值。 1.三表法 利用交流电流表、交流电压表、相位表(或功率表)测量元件参数称为三表法、这种方法最直接,计算简便。实验电路如图1所示。元件阻抗为: 对于电阻 对于电容 对于电感 由已知的电源角频率ω,可进一步确定元件参数。
2.二表法 若手头上没有相位表或功率表,也可只用电流表和电压表测元件参数,这种方法称为二表法。由于电阻器和电容器可看作理想元件,已知其阻抗为0或者90度,故用二表法测其参数不会有什么困难。 二表法测电感线圈参数如图2所示。途中的电阻R是一个辅助测量元件。由图2课 件,根据基尔霍夫电压定律有,而,其中和为假想电压,分别代表线圈中等效电阻r和电感L的端电压。各电压相量关系如图3所示,忧郁U、U1、U2可由电路中测的,故途中小三角△aob的各边长已知,再利用三角形的有关公式(或准确地画出图3,由图3直接量的)求出bc边和ac边的长度,即电压U r 和U L可求。最后,由式及已知的电源角频率ω可求得线圈的参数。 3.一表法 只用一个交流电压表测量元件参数的方法称为一表法,其原理与二表法相同,不同
高速运动物体的速度测试系统设计
高速运动物体的速度测试系统设计 姓名: 班级: 学号:
高速运动物体的速度测试系统设计 1 引言 本文的主要任务是通过设计高速运动物体的速度测试系统来确定高速运动物体在在运动过程中的速度,一种基于光幕测速的高速运动物体速度测试系统。激光光幕速度测试是利用光电检测技术实现对物体速度的非接触测试,该方法操作简便,效率高,测试范围大,精度高。 2 测速系统的工作原理 高速运动物体参数测试系统主要用来测量运动物体在高速运动过程中的速度。当运动物体穿过测速靶光幕时,进入光电探测器的光通量会发生变化,通过光电探测器将变化的光信号转化为电流信号,经触发整形后成为具有一定脉冲宽度的触发计时信号,并送计算机进行处理。当计算机获取两个触发计时信号的间隔后,根据靶距,由测速软件进行数据处理,可得到运动物体的速度值及相关试验数据。 用两套与上述相同的靶就可构成一套区截装置,可获取运动物体通过两个光幕的时间间隔,得到运动物体的飞行的平均速度。以天幕靶为例,当天幕靶在室外工作时,以天空为背景,由于狭缝光阑的作用,天幕镜头的视场具有一定厚度的扇形,通常称之为天幕。一旦有物体进入天幕,遮住了进入狭缝的部分光线,通过狭缝后面的聚光系统到达光敏元件的光通量会发生变化,光敏元件会产生一个正比于光通量变化的电信号,电路将电信号放大、整形后,最后输出一个脉冲信号,触发计时仪,完成计时功能。测速时,用两台天幕靶与一台计时仪配合(可直接连接计算机进行数据处理)。 计时仪给出飞过两靶之间距离的时间△T,弹丸在此距离S内的平均速度口。在计时仪测速中,通常称开始计时的信号为启动信号,停止计时的信号为停止信号。给出启动信号或停止信号的装称为区截装置,两信号之间的时间间隔记录装置称为计时仪靶1和靶2分别为启动信号和停止信号的区截装置,两区截装置之间的弹道线长度L2通常称为靶距。在计时仪测速中,第一个区截装置启动计时仪开始计时,第二个区截装置终止计时仪停止计时。计时仪记录的时间T代表了弹丸飞过靶距L2所经历的时间。测速系统主要是测出靶距L2和时间T,并由此换算出弹丸在此距离上的平均速度。如图所示。
室内外热环境参数测定实验指导书
【实验名称】室内外热环境测试 【实验性质】综合性实验 【实验任务】测试不同类型建筑、不同建筑空间的热环境,对室外气象因素对室内热环境的影响进行分析,并根据分析结果针对建筑热工设计提出结论性意见。 【实验目的】 通过实验,使学生了解室内外热环境参数测定的基本内容,初步掌握仪器仪表的性能和使用方法,进一步感受和了解室外气象因素对建筑热环境的影响。 【实验内容】 建筑室内外热环境参数的测定主要分为室内热环境测定和室外热环境测定两部分。其中:室内热环境参数的测量主要包括2个方面的内容: ■温度的测定 ■空气相对湿度的测定 室外热环境参数的测试同样主要包括2个方面的内容: ■温度的测定 ■空气相对湿度的测定 ■风环境的测定 【实验仪器设备】 1、室内热环境的测定主要使用TESTO174H温湿度记录仪。 2、室外热环境参数的测定主要使用温湿度记录仪及8910便携气象站。 【实验方法和步骤】 1、室内热环境参数的测定 (1)将记录仪与计算机连接,设置记录仪时间及存储间隔等信息; (2)选择测点,注意避免测点受到日照等因素的影响; (3)选择完整时间段对选定测点和室外温湿度进行测试; (4)上传数据,进行数据整理和处理; (5)结合测点房间的特点(建筑形式、外环境、布局、朝向、围护结构等等)对实测数据的差异进行分析,提出建筑热工设计的改进型意见及设计原则; 测点A 位于建艺馆地下一层综合实验室西侧,有西向外墙外窗,有采暖; 测点B位于建艺馆地下一层综合实验室西侧,无外墙外窗,有采暖,暖气配置较少; 测点C 位于建艺馆地下一层综合实验室构造展室,无外墙外窗,无采暖;
【数据整理】 根据提供的数据图表选择所研究的时间段(周期10个小时),将对应的时刻、数据参数填入表格。 【分析】 根据数据结果分析同样外扰作用下不同室内环境的原因。 【结论及建议】 根据分析结果,归纳建筑热环境影响因素及其影响机理,提出通过建筑设计和设备等多种措施改善室内热环境的建议。
QTD-III型 曲柄滑块、导杆、凸轮组合实验指导书实验一、机构运动参数的测试和分析实验教学提纲
实验一、机构运动参数的测试和分析实验 一、实验目的 1.掌握机构运动的周期性变化规律,并学会机构运动参数如位移、速度和加速度等的测试原理和方法; 2. 学会运用多通道通用实验仪器、传感器等先进实验技术手段开展实验研究的方法; 3. 利用计算机对平面机构动态参数进行采集、处理,作出实测的动态参数曲线,并通过计算机对该平面机构的运动进行数值仿真,作出相应的动态参数曲线,从而实现理论与实际的紧密结合。 二、实验内容 1.测试曲柄导杆机构、曲柄滑块机构、凸轮机构等机构的构件转角、移动位移等运动参数; 2.比较实测参数曲线与理论仿真曲线的差异。 三、实验仪器 QTD-III型曲柄、导杆、凸轮组合实验台 该组合实验装置,只需拆装少量零部件,即可分别构成四种典型的传动系统。他们分别是曲柄滑块机构、曲柄导杆机构、平底直动从动杆凸轮机构和滚子直动从动杆凸轮机构。具体结构示意图如下图所示。 (a)曲柄滑块机构
(b)曲柄导杆机构 (c)平底直动从动件凸轮机构 (d)滚子直动从动件凸轮机构 1、同步脉冲发生器 2、涡轮减速器 3、曲柄 4、连杆 5、电机 6、滑块 7、齿轮8、光电编码器9、导块 10、导杆11、凸轮12、平底直动从动件 13、回复弹簧14、滚子直动从动件15、光栅盘 四、实验原理 本实验仪由单片机最小系统组成。外扩 16 位计数器,接有 3 位 LED 数码显示器可实时显示机构运动时曲柄轴的转速,同时可与 P C 机进行异步串行通讯。在实验机构动态运动过程中,滑块的往复移动通过光电脉冲编码器转换输出具有一定频率(频率与滑块往复速度成正比),0-5伏电平的两路脉冲,接
ttl与非门的静态参数测试
实验一TTL 与非门的静态参数测试实验报告 By kqh from SYSU 一、实验数据及数据分析 1.低电平输出电源电流I CCL和高电平输出电源电流I CCH及静态平均功耗P: I CCL: 测试电路如图1(a)所示,测得I CCL为 I CCH: 测试电路如图1(b)所示,测得I CCH为mA P: P===W= 图1(a) 图1(b) 数据分析:低电平输出电源电流I CCL比高电平输出电源电流I CCH高,符合理论预测。 2.输入短路电流I IS和输入漏电流I IH: I IS(或I IL): 测试电路如图2(a)所示,测得I IS为 I IH: 测试电路如图2(b)所示,电流过小,多用电表无测量示数 图2(a) 图2(b) 数据分析:输入短路电流I IS和输入漏电流I IH分别是和无示数,均比较小,说明前级门电路带负载的个数较多。
3.输出高电平U OH及关门电平U off 测试电路如图3所示,测得U OH为 则当输出电压为90%U OH()时,测得输入电压(即关门电压)为 图3 4.输出低电平U OL及开门电平U on 测试电路如图4所示,测得U OL为 调整输入电压,测得开门电平U on为 图4 数据分析:综合实验3、4可知,74LS00 的跳变电压在在之间,高电平为,低电 平为。 5. u i(V) 0 U0(V) u i(V) U0(V)
u i (V) 2 3 4 U 0(V) 用MATLAB 拟合,u 0关于u i 的函数图像,如图5所示 0.511.522.533.54TTL 与非门的电压传输特性 v o v i 图5 图像分析:在高电平输出范围内,随输入电平增大,输出电平轻微减小;在低电平输出范围内,输出电平基本不随输入电平变化而变化。输入电平在左右时,输出电平出现跳跃,与实验3、4结果基本相符 6. 平均传输延迟时间t pd 测试电路如图6(a)所示,输出波形如图6(b)所示。 图6(a)
11凸轮机构运动参数的测定
课题十一凸轮机构运动参数的测定凸轮机构主要是由凸轮,从动件和机架三个基本构件组成的高副机构。其中凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。从动件与凸轮轮廓接触,传递动力和实现预定的运动规律故从动件的运动规律取决于凸轮轮廓曲线。由于组成凸轮机构的构件数较少,结构比较简单,只要合理地设计凸轮的轮廓曲线就可以使从动件获得各种预期的运动规律。 凸轮机构能将主动件的连续运动转变为从动件的移动或转动,因而广泛用于各种机械中,特别是自动机械、自动线中的机械控制装置中。 1.凸轮机构运动参数的测定实验台及其工作原理 进行凸轮机构运动参数的测定实验台有多种形式,现以如图11—1所示的连杆机构与凸轮组合实验台,完成凸轮机构运动参数的测定。 图11—1 连杆机构与凸轮组合实验台 a)b)
图11—2 凸轮机构实验台的运动简图 1--同步脉冲发生器 2—减速器 3--电机 4—传感器 5--光栅盘 6--凸轮 7--平底直动从动件 8--回复弹簧 9--滑块 10--滚子直动从动件 如图11—2a)、b)所示,凸轮机构的实验台是电机、减速器、凸轮、直动从动件、滑块、传感器、同步脉冲发生器、光栅盘和回复弹簧等组成。 通过调速器调节电机的转速输出后,经蜗杆减速器带动凸轮转动,驱动从动件运动,其位移量通过直线位移传感器由模/数转换模块在嵌入式计算机系统的控制下,将位移量转换成数字信号,计算出其往复移动的周期、线速度、线加速度等机构运动参数。也可更换不同廓线的盘形凸轮,从而调节从动件的偏心距。 2.凸轮机构运动参数的测定实验注意事项 (1) 调节电机的转速时应缓慢转动调速旋钮,在关闭实验台电源前,应将电动机的转速调到最小。 (2) 用手转动凸轮盘1~2 周,检查各运动构件的运行状况,各螺母紧固件应无松动,各运动构件应无卡滞现象。 (3) 测试时,凸轮的转速不应过高,以免产生大的冲击,造成零件损坏。 (4) 调节从动件偏心距时,偏心距不宜过大,否则有可能使凸轮机构卡死,造成零件损坏。 2.凸轮机构运动参数的测定的操作过程 (1) 按要求组装凸轮机构,分析凸轮机构的组成。 (2) 轻轻转动凸轮,分析凸轮机构的运动特性,找出基圆、推程、远休止程、回程、近休止程,并量出对应的推程角、远休止角、回程角、近休止角。 (3) 以从动件在最低位置开始,轻轻转动凸轮,每转5°,量出从
机构运动与力参数测试实验报告(广州大学)
机构运动与力参数测试实验报告 院、系机电学院专业班级机械113 姓名丘雄锋同组人刘栋、陈均铨、李楚旭、何嘉豪、张黎明、乔攀、李佩斌 实验日期2013 年 4 月28 日 一、机构运动方案设计(绘制机构运动简图,简要说明其结构特点和工作原理及使用场合) 1滑块;2连杆;3同轴的皮带轮和齿轮; 4皮带;5皮带轮;铰链B固定在齿轮上 自由度计算: F=3×4-(2×5+1)=1 结构特点:上图实际为曲柄滑块机构,曲柄滑块机构具有的运动副为低副(上图所示机构有一组皮带轮构成的高副),构成低副两元件的几何形状比较简单,加工方便,易于得到较高的制造精度等优点
工作原理:此机构常用于将曲柄的回转运动变换为滑块的往复直线运动;或者将滑块的往复直线运动转换为曲柄的回转运动,而上图为前者,即将曲柄的回转运动变换为滑块的往复直线运动。其具体工作原理为:由电机带动皮带轮5顺时针转动,从而带动结构3转动,再通过连接在齿轮上的连杆2带动滑块1做往复直线运动。 使用场合:自动送料机构、冲床、内燃机、空气压缩机等。 二、绘制平面机构的运动学曲线s、v和a曲线。
三、根据数据曲线分析搭建的机构,包括是否有运动冲击,运行状况如何。并分析波动、冲击、不稳定的原因。 根据搭建机构及数据曲线图分析,运动有几个局部位置有运动冲击,但对整体影响不大,运行状况较为顺利。 1、根据角位移图分析,可看出角速度线并不是水平直线,而是有一个微小的上下跳动的幅度。其产生的原因可能是电机本身频率不稳定,或者是滑块来回摩擦系数不一致产生。 2、根据直线位移曲线图,可看出位移曲线并不是光滑的曲线,在波峰跟波谷都有一段是直线。与直线的末端相连的曲线一开始便有较大的斜率,这会对测量器材造成一定的冲击,同时也造成机构也不稳定。排除构件连接之间的偏差,为了更好得测量滑块的往复直线运动,而不导致滑块卡死,连接滑块的测量器材在连接节点有较大的松弛度,从而导致滑块在最左端和最右端时有一段测量的空窗期,导致不能测量进而产生速度曲线的波峰、波谷有一段直线。