传函仪
振弦式读数仪说明书

振弦式读数仪说明书
振弦式读数仪是一种用于测量土木工程、地质工程以及结构健康监测中振弦传感器(如钢弦式位移计、应力计、锚索测力计等)输出信号的精密仪器。
以下是一个简化版的振弦式读数仪说明书概述:
产品名称:振弦式读数仪
产品功能:
1.适用于各类振弦式传感器,精确测量其振动频率。
2.自动识别并读取预置在传感器中的编码信息。
3.实时显示测量数据,并具备数据存储与导出功能。
4.具备温度补偿功能,确保测量结果不受环境温度影响。
使用步骤:
1.开机与初始化:打开电源开关,待设备自检完毕进入待机状态。
2连接传感器:将振弦传感器按照接线图正确接入读数仪接口。
3.设置参数:根据需要调整采样频率、温度补偿等相关参数。
4.开始测量:选择开始测量或自动扫描模式,仪器将自动检测并读取传感器的频率值和对应的物理量(如应力、应变、位移等)。
5.查看与保存数据:读数仪屏幕上会实时显示测量结果,用户可以手动记录或通过内置的数据存储系统保存测量数据,后期可通过USB、蓝牙等方式传输至电脑进行进一步分析。
注意事项:
1.在操作前务必确保读数仪电量充足,且已正确接地以减少干扰。
2.连接传感器时要遵循极性,避免因接线错误导致仪器损坏或测量误差。
3.测量过程中尽量保持传感器与读数仪的稳定接触,避免剧烈震动和温度突变对测量精度产生影响。
4.定期校准读数仪,保证测量数据准确性。
请参考具体型号振弦式读数仪的详细说明书以获取更详尽的操作指南和维护保养方法。
双容水箱液位控制结题研究分析报告
双容水箱液位控制结题研究分析报告自动控制系统课程设计双容水箱系统——结题报告学校:北京工业大学学院:电控学院专业:自动化班级:组号:第五组组员:实验日期:指导教师:目录一、课程设计任务 1 b5E2RGbCAP 二、被控对象地模型及分析 3 p1EanqFDPw 三、系统控制方案论证 5 DXDiTa9E3d 四、控制结构与控制器设计步骤 6 RTCrpUDGiT 五、实验过程论述 8 六、实验结果及分析 10 5PCzVD7HxA 七、总结 10 jLBHrnAILg 八、附录 10 xHAQX74J0X一、课程设计任务 1、课程设计目地(1)掌握自动控制系统地分析与控制器设计方法. (2)掌握基于 MATLAB 地系统仿真方法(3)掌握基于实验方法确定系统模型参数地方法 (4) 掌握基于物理对象地控制系统地调试方法(5)培养编制技术总结报告地能力. 2、被控对象: 双容水箱系统 3、性能指标要求衰减率 4:1~10:1,超调量 Mp<10%,调节时间 Ts<45s,稳态误差0 sse 二、被控对象地模型及分析 1 双容水箱地数学模型双容水箱液位控制结构图如下图所示:图 2-3 双容水箱液位控制结构图设流量 Q 1 为双容水箱地输入量,下水箱地液位高度 H 2 为输出量,根据物料动态平衡关系,并考虑到液体传输过程中地时延,其传递函数为 LDAYtRyKfE 式中 K=R 4 ,T 1 =R 2 C 1 ,T 2 =R 4 C 2 ,R 2 、R 4 分别为阀 V 3 和 V 4 地液阻,C 1 和 C 2 分别为左水箱和右水箱地容量系数.式中地 K、T 1 和 T 2 可由实验求得地阶跃响应曲线求出.具体地做法是在下图所示地阶跃响应曲线上取:Zzz6ZB2Ltk 6) - 1 ( *) 1 * )( 1 * () () () (2 1 12esS T S TKS GS QS H1)、h 2 (t)稳态值地渐近线h 2 (∞);图 2-4 阶跃响应曲线 2)、h 2 (t)| t=t1 =0.4 h 2 (∞)时曲线上地点 A 和对应地时间 t 1 ; 3)、h 2 (t)| t=t2 =0.8 h 2 (∞)时曲线上地点B 和对应地时间 t 2 . 然后,利用下面地近似公式计算式 1-6 中地参数 K、T1 和 T2.其中:对于式(1-6)所示地二阶过程,0.32<t 1 /t 2 <0.46. 当 t 1 /t 2 =0.32 时,为一阶环节;当 t 1 /t 2 =0.46 时,过程地传递函数 G(S)=K/(TS+1) 2 (此时T 1 =T 2 =T=(t 1 +t 2 )/2*2.18 ) dvzfvkwMI1 过曲线地拐点做一条切线,它与横轴交于 A 点,OA 即为滞后时间常数て. 下图为我们组建立地数学模型:双容传函:2.16t tT T ) 4) (K 2 12 12 、阶跃输入量输入稳态值O Rh) 55 . 0 74 . 1 () T (T T T ) 52122 12 1tt、 t h t 0 0.4 0.8 2 0 0 ( h 0 0 ( h 0 0 ( 1 t 2 B A h 2 2 (t) 2 P て A *) 1 * 28 . 72 )( 1 * 15 . 114 (88 . 0) () () ( 1512esS SS GS QS H单容传函:总传函:2 、双容水箱系统数学模型地分析双容水箱系统地等效传函是个二阶惯性环节,从图上可以看出水箱系统地滞后包括两个部分,一部分是由于传输延时造成地纯滞后,另一部分是有水箱自身地容量滞后.由于系统是二阶惯性环节,所以开环曲线呈“s”型. rqyn14ZNXI 三、系统控制方案论证 1、选用地控制方法:PID 控制方法 2、控制方法简介 PID 控制器各控制规律地作用如下:(1)比例控制(P):比例控制是一种最简单地控制方式.其控制器地输出与输入误差信号成比例关系,能较快克服扰动,使系统稳定下来.但当仅有比例控制时系统输出存在稳态误差 EmxvxOtOco (2)积分控制(I):在积分控制中,控制器地输出与输入误差信号地积分成正比关系.对一个自动控制系统,如果在进入稳态后存在稳态误差,则称此控制系统是有差系统.为了消除稳态误差,在控制器中必须引入“积分项”积分项对误差地累积取决于时间地积分,随着时间地增加,积分项会越大.这样,即便误差很小,积分项也会随着时间地增加而加大,它推动控制器地输出增大使稳态误差进一步减小,直到等于零.但是过大地积分速度会降低系统地稳定程度,出现发散地振荡过程. 比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差.SixE2yXPq5 (3)微分控制(D):在微分控制中,控制器地输出与输入误差信号地微分 *) 1 * 25 . 59 (457 . 0) (12esSS G *) 1 * 43 . 186 * 762 . 8250 (93 . 1 * 457 . 0) (32 esS SSSG(即误差地变化率)成正比关系.自动控制系统在克服误差地调节过程中可能会出现振荡甚至失稳.其原因是由于存在有较大惯性环节或有滞后环节,具有抑制误差地作用,其变化总是落后于误差地变化.解决地办法是使抑制误差地作用地变化“超前”,即在误差接近零时,抑制误差地作用就应该是零. 6ewMyirQFL 初步采取地方案: 副回路:比例控制 PID 主回路:比例积分控制 PID 四、控制结构与控制器设计步骤 1、控制结构:串级控制系统 2、控制器地设计:逐步逼近法逐步逼近法是先副后主,逐步逼近. 具体步骤为:先断开主回路,整定副控制器.后闭合主回路,整定主控制器. 重新调整副控制器参数.若未达到控制要求,再调整主控制器参数.以上3、4 步骤循环进行,直到满足控制指标为止.对于不同地控制系统和不同地品质指标要求,逐步逼近法逼近地循环次数是不同地,所以往往费时较多. kavU42VRUs及仿真及 PID 参数调节:副回路整定参数:P:35 I:1.2 D:15 技术指标:Mp=5% Ts:45s Ess=0 主回路整定参数:P:30 I:0.18 D:40 技术指标:Mp=9% Ts:25s Ess=0五、实验过程论述在课设地开始阶段,我们先熟悉了一下实验所用到地仪器及软件,并对实验过程和目地进行了一番学习及了解. 接下来我们便进入到了对单/双容水箱地特性测试,也就是对变送器地调试,由于主副回路变送器地滑变总是自动跳数,所以导致我们组花了很长地时间去确定零点电压及线性关系.最后主副回路零点电压基本分别稳定在了 1.04v 和 1.1v. y6v3ALoS89 然后便是对水箱数学模型地建立以及控制结构与控制器地设计与仿真.(也就是我前面所陈述地传函地测试与建立,以及我们组所选择地串级控制系统和 PID 整定方法)此阶段我们组完成地还算比较顺利,虽然不能保证所得传函一定百分百准确,但 PID 参数地调试及仿真结果还算比较令人满意.M2ub6vSTnP 最后便进入到了实时控制阶段.当我们天真地以为仿真调参过后已经接近成功地时候,实时控制地结果告诉我们,理想和现实果然还有一定地差距.当我们搭好模型并采用我们仿真所调试地参数进行测试后惊奇并失望地发现,不仅响应曲线不对,连液位都无法稳定. 一阵挫败感过后,实验依然得继续,我们便进入了新一轮地调参活动中,最终我们确定地方案是副回路用比例控制,主回路用比例积分控制.当我们随意给定系统几个液位值并加入各种形式扰动后,系统依然能恢复稳态,虽然调节时间略长,但其它性能指标要求已基本满足. 至此实验基本告以段落. 0YujCfmUCw 实时控制结构图 PID 参数整定方法:两步法第一步,整定副控制器;第二步,整定主控制器. 副回路:比例控制 P=1.5 主回路:比例积分控制 P=3.5 I=0.21 给定 2cm 主水箱以加水地方式引入扰动技术指标:Mp=0 Ts=75s Ess=0 加扰动后:Mp=0 Ts=65s Ess=0 2 给定 4cm 主水箱以加大阀门开度地形式引入扰动技术指标:Mp= 7.5% Ts=110s 加扰动后:Mp= 6.25% Ts=75s六、实验结果及分析实验结果:从图中可以看出,在我们随意给定 2cm 和 4cm 以及加入适当扰动后,系统依然能恢复稳定并保证无静差且响应曲线较好,但由于更正系统参数后时间紧迫使得在选择PID 参数时不够精确,导致响应时间未能达到小于 45 秒. eUts8ZQVRd 分析:纵观我们组整个实验过程以及最后响应曲线地呈现,我总结出以下几个问题:(1)仿真地阶跃响应曲线与实际曲线之间存在一定地差别. sQsAEJkW5T 仿真处于理想状态,而实际是不可能处于理想状态地,系统受到了个个方面地干扰,其次,我组在计算系统参数地时候采用了大量地近似计算,所以这也有可能造成了仿真与实际系统之间地误差. GMsIasNXkA (2)实际液位与示波器显示地差别这个问题是我们组在进行实时控制时遇到地.刚开始我们以为是仪器坏了,可后来经过验证,结果有两方面原因:1 从头开始我们组地万用表就是坏地2.由于变送器地跳变使得水箱地线性关系并没有那么准确.TIrRGchYzg (3)系统调节时间过长虽然 P I D 三部分各有各自地特点,但在调节过程中他们地作用毕竟还是相互地,正所谓牵一发而动全身.但由于时间关系,我们组未能更精确地调整参数,所以导致系统调节时间未能达到小于 45 秒. 7EqZcWLZNX 七、总结此次为期一周地课设实验使我收获颇丰. 首先是让我们有了一次将理论与实践相结合地机会.虽然相关地知识在理论课上都有涉及,但到了实际应用中又是另一回事儿.从参数地测量,系统控制方法地选择,控制器地设计以及最后在实物上进行测试,让我们对工业控制地过程有了更清晰地了解.lzq7IGf02E 其次,这次课设让我们更加熟悉了仿真软件MATLAB 地使用以及“实时控制”这个我们以前完全没有接触过地东西. 同时,这次试验也让我们对自控及过控书上地知识进行了复习以及应用. zvpgeqJ1hk 其实这次课设对我们组而言也应吸取一些经验和教训. 比如我们地实时控制一直出不来,直到周五下午才在老师地帮助下发现,原来我们所用地万用表一直是坏地,导致我们要在三个小时之内重新调零调参测曲线,可见一个小小地疏忽不仅浪费了时间还对实验结果地质量产生了一定地影响. NrpoJac3v1 还好比较幸运地是我们基本顺利地完成了此次课设,实验结果也较为满意.最后特别感谢老师地指导以及其它组同学在忙碌之余对我们组伸出地橄榄枝,我们以后会再接再厉,多参加一些这样地实习,提高自己地实践经验,为以后工作打下坚实地基础. 1nowfTG4KI7 7 、附录附件 1:THBDC-1 型控制理论·计算机控制技术实验平台硬件地组成及使用一、直流稳压电源直流稳压电源主要用于给实验平台提供电源.有±5V/0.5A、±15V/0.5A及+24V/1.0A 五路,每路均有短路保护自恢复功能.它们地开关分别由相应地钮子开关控制,并由相应发光二极管指示.其中+24V 主用于温度控制单元和直流电机单元. fjnFLDa5Zo 实验前,启动实验平台左侧地空气开关和实验台上地电源总开关.并根据需要将±5V、±15V、+24V 钮子开关拔到“开”地位置. tfnNhnE6e5 实验时,通过 2 号连接导线将直流电压接到需要地位置. 二、低频函数信号发生器及锁零按钮低频函数信号发生器由单片集成函数信号发生器专用芯片及外围电路组合而成,主要输出有正弦波信号、三角波信号、方波信号、斜波信号和抛物波信号.输出频率分为 T1、T2、T3、T4 四档.其中正弦信号地频率范围分别为0.1Hz~3.3Hz、2.5Hz~86.4Hz、49.8Hz~1.7kHz、700Hz~ 10kHz 三档,V p-p 值为 16V. HbmVN777sL 使用时先将信号发生器单元地钮子开关拔到“开”地位置,并根据需要选择合适地波形及频率地档位,然后调节“频率调节”和“幅度调节”微调电位器,以得到所需要地频率和幅值,并通过 2 号连接导线将其接到需要地位置. V7l4jRB8Hs另外本单元还有一个锁零按钮,用于实验前运放单元中电容器地放电.当按下按钮时,通用单元中地场效应管处于短路状态,电容器放电,让电容器两端地初始电压为 0V;当按钮复位时,单元中地场效应管处于开路状态,此时可以开始实验. 83lcPA59W9 三、阶跃信号发生器阶跃信号发生器主要提供实验时地阶跃给定信号,其输出电压范围为-5~+5V,正负档连续可调.使用时根据需要可选择正输出或负输出,具体通过“阶跃信号发生器”单元地拔动开关来实现.当按下自锁按钮时,单元地输出端输出一个连续可调(选择正输出时,调 RP1 电位器;选择负输出时,调 RP2 电位器)地阶跃信号(当输出电压为1V 时,即为单位阶跃信号),实验开始;当按钮复位时,单元地输出端输出电压为 0V. mZkklkzaaP 注:单元地输出电压可通过实验台上地直流数字电压表来进行测量. 四、低频频率计低频频率计是由单片机89C2051 和六位共阴极 LED 数码管设计而成地,具有输入阻抗大和灵敏度高地优点.其测频范围为:0.1Hz~10.0kHz. AVktR43bpw 低频频率计主要用来测量函数信号发生器或外来周期信号地频率.使用时先将低频频率计地电源钮子开关拔到“开”地位置,然后根据需要将测量钮子开关拔到“外测”(此时通过“输入”或“地”输入端输入外来周期信号)或“内测”(此时测量低频函数信号发生器输出信号地频率). ORjBnOwcEd 另外本单元还有一个复位按钮,以对低频频率计进行复位操作. 注:将“内测/外测”开关置于“外测”时,而输入接口没接被测信号时,频率计有时会显示一定数据地频率,这是由于频率计地输入阻抗大,灵敏度高,从而感应到一定数值地频率.此现象并不影响内外测频. 2MiJTy0dTT 五、交/ 直流数字电压表交/直流数字电压表有三个量程,分别为 200mV、2V、20V.当自锁开关不按下时,它作直流电压表使用,这时可用于测量直流电压;当自锁开关按下时,作交流毫伏表使用,它具有频带宽(10Hz~400kHz)、精度高(±5‰)和真有效值测量地特点,即使测量窄脉冲信号,也能测得其精确地有效值,其适用地波峰...。
精选ChinesePLLjitter资料

Data Input
Phase Detector
Phase Error Amplifier
Voltage Controlled Oscillator (VCO)
Recovered Clock
压控振荡器(VCO)可以跟踪信号抖动
Closed loop gain out A(s) G(s) G(s) e j(s) in 1 A(s)
Data Input
Phase Detector
Phase Error Amplifier
Voltage Controlled Oscillator (VCO)
Recovered Clock
鉴相器有效地提取输入信号中的抖动,调节压控振荡器(VCO)以跟踪输入抖 动
抖动跟踪是频率相关的
Closed loop gain out A(s) G(s) G(s) e j(s) in 1 A(s)
频谱线显示了周期抖动成分
1E-6
Jitter Spectrum
扩频时钟SSC和其谐波
100E-9
10E-9
Seconds (rms)
1E-9
100E-
1 MHz 周期抖动PJ (和
12
谐波)
10E-12
1E-12
100E15
10E-15
1E-15 1E+3
33 kHz
10E+3
100E+3
1 MHz
Data Input
Phase Detector
Phase Error Amplifier
Voltage Controlled Oscillator (VCO)
Recovered Clock
北京计量器具收费标准
2等
rb:(0~200)mm
头
500
C-056—0056
螺旋线样板
2等
β:0°~45°
角
560
C—057—0057
半径样板
(1~25)mm
片
20
C—058-0058
螺纹样板
(0。4~6。0)mm
片
12
C-059-0059
标准球
φ(0~100)mm
件
300
C—060-0060
三针
0级
φ(0.118~6.585)mm
2′
360°
套
50
C-047—0047
杠杆卡规
(0~50)mm
件
100
C—048—0048
圆锥量规
1等1级
莫氏(0~6)公制(80~200)
件
240
2等2级
3级
莫氏(0~6)公制(80~200)
件
175
C—049-0049
角度块
1级
15°10′~90°(7块)
角
25
1级
15°10′~90°(94块)
块
30
(0.5+5L)μm
5等
100mm—500mm(不含500mm)
块
100
(0.5+5L)μm
5等
500mm-1000mm
块
100
C-002—0002
深度卡尺检具
(0~500)mm
件
50
C-003-0003
尺厚卡尺综合误差检具
(φ3~φ40)mm
套
150
C-004—0004
齿厚卡尺
标准模拟应变量校准器 上海产
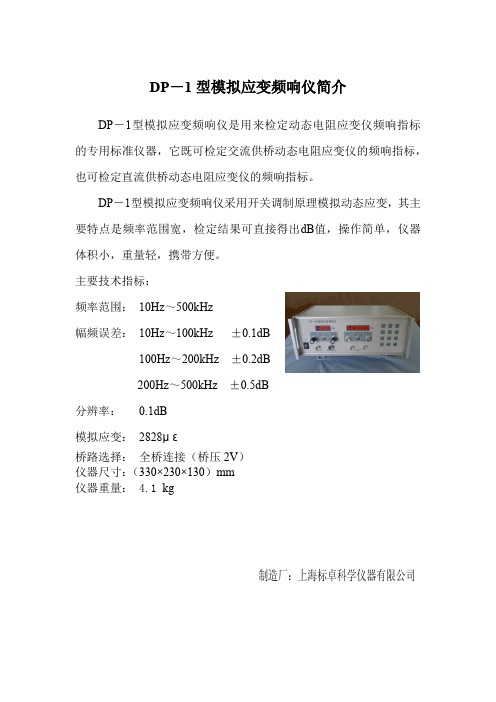
DP-1型模拟应变频响仪简介DP-1型模拟应变频响仪是用来检定动态电阻应变仪频响指标的专用标准仪器,它既可检定交流供桥动态电阻应变仪的频响指标,也可检定直流供桥动态电阻应变仪的频响指标。
DP-1型模拟应变频响仪采用开关调制原理模拟动态应变,其主要特点是频率范围宽,检定结果可直接得出dB值,操作简单,仪器体积小,重量轻,携带方便。
主要技术指标:频率范围:10Hz~500kHz幅频误差:10Hz~100kHz ±0.1dB100Hz~200kHz ±0.2dB200Hz~500kHz ±0.5dB分辨率:0.1dB模拟应变:2828με桥路选择:全桥连接(桥压2V)仪器尺寸:(330×230×130)mm仪器重量: 4.1 kg制造厂:上海标卓科学仪器有限公司DR-12型数字式标准模拟应变量校准器简介DR-12型数字式标准模拟应变量校准器(以下简称“校准器”)作为力学应变量的电学模拟标准,可代替标准电阻应变计产生模拟标准应变量,适用于检定和校准各种电阻应变仪。
“校准器”突破了过去传统使用波段开关的模式,采用最新研发的触摸式大屏幕显示,所有的操作均由“触摸”完成,避免了过去使用波段开关所带来的接触不良现象;还可以通过菜单预设定任意标准应变值,使整个检定过程自动扫描完成。
“校准器”线路设计为对称型结构,所采用的电阻元件为高精密交直流标准电阻器,其阻值精密、稳定,并具有良好的频率特性。
“校准器”具有准确度高、量程宽、稳定性好、线性度好、操作快捷方便等特点,可以检定和校准各种交流供桥或直流供桥的静态电阻应变仪和动态电阻应变仪,是一种交直流两用的标准仪器。
“校准器”具有“1/4桥”、“半桥”和“全桥”功能,可根据具体情况,方便地选择不同桥路的连接。
技术指标测量范围:(1~100000)με频率范围:0~100kHz准确度级别:0.05级灵敏系数:K=2.00桥臂电阻:120Ω桥路连接:1/4桥、半桥、全桥最大工作电压:10V制造厂:上海标卓科学仪器有限公司DR-35型数字式标准模拟应变量校准器简介DR-35型数字式标准模拟应变量校准器(以下简称“校准器”)作为力学应变量的电学模拟标准,可代替标准电阻应变计产生模拟标准应变量,适用于检定和校准各种电阻应变仪。
离轴三反式多光谱相机的装调
摘 要 : 离轴 三反 系统 的 装 调 是 遥 感 相 机 研 制 中 的 一 项 难 点 。针 对 离轴 三反 式 多光 谱 相 机 ,利 用 多种 仪 器与
计 算机 辅 助 装 调软 件 相 结 合 ,对 系统 进 行 了装 调 。 最 终 检 测 结 果 表 明 ,相 机 各 谱 段 实验 室静 态传 函
C ag h n10 3 , hn ) h c u 3 0 3 C i n a
A s r c :T e ai n n f o ・x s t r e— r r s s m s d f c l i h e e r h a d d v l p n f rmo e b ta t h l me t o f - i h e — o y t g a mi e i i ut n t e r s a c n e eo me t o e t f i
性 和非 对称 性 ,实 际 制 造 和装 调 难度 较 大 。
和前托架。3 个反射镜分别 布置在机身组件 的相应位 置上 ,主镜组件与第 三镜组件安装在 机身组件后 端 面 ,次 镜组件安装在机 身组 件前端 面 .次镜组 件和 主镜组 件 、第三镜组件均有 防尘 、防杂光设置 的防 护罩 ,并 为对应组件热控 的实施提供 基础 。调焦组
第2卷 8
第8 期
Vo . No. 1(0 0 — 0 10 10 — 02 1)8 0 0 — 4 1 1
离轴 三反 式 多光谱相机 的装调
梅
贵 ,翟 岩 ,苗 健 宇
( 中国科学院 长春 光学精 密机械与物理研 究所 ,吉林 长春 1 0 3 ) 30 3
本文所述 的多光谱 相机具有 蓝 、绿 、红 、近红
外 4个谱 段 ,光机结构 主要 包括 主镜组 件 、次镜组 件 、第三镜组件 、焦面组件及系统整体框架。
Williams Sound IR T2 信号传输器说明书
IntroductionThe IR T2 is shipped with Williams Sound's TFP 057 (48VDC power supply). The IR T2 is also compatible with the Williams Sound POE 001 Power over Ethernet transformer, and with most POE switches.Note: The IR T2 is NOT compatible with POE+ power supplies unless they are backwards compatible with POE standards. Note: We cannot guarantee the audio quality of IR T2 units powered from a third-party POE switch, as they may introducenoise into the system.POE KT1This kit should be used for applications using the power supply included with the IR T2 (TFP 057). The kit includes:• WCA 131• WCA 133POE KT2This kit should be used for applications using POE 001 or a POE Switch. The kit includes:• WCA 131• WCA 132Using POEPOE is provided through a CAT5 or higher cable. Installers should carefully select the grade of CAT5 (or better) cable for the best quality. CAT5 cable provides many advantages:• Available pre-terminated in various lengths, or terminated on site to the required length• Available plenum rating, if required• Available shielded for audio applicationsWilliams Sound has tested control and balanced audio configurations with up to 300 ft. [91 m.] of CAT5 cable. Environmental interference can limit the length of cable depending on how it is being used. Unbalanced audio setups in excess of 20 ft. [6 m.] of cable are not recommended.CAT5 cable contains four twisted pairs of wires, two of which are used for POE. Using Williams Sound's passive POE injector kits (POE KT1 or POE KT2) allows the installer to use the remaining two pairs of wire for one of the following three options:• 1 channel of balanced line level audio• 1 or 2 channels of unbalanced line level audio• RS-232 control and monitoring signalIf using 2 channels of balanced line level audio, control/monitoring, and power, POE KT1 or POE KT2 will need to be used along with an additional CAT5 cable. One CAT5 cable will be connected to the POE injector kit and provide power and control, while the other CAT5 cable will provide audio.Input DiagramsControl RS-232CH BLine LevelCH A Line Level CAT5 CableCAT5 CablePOE SwitchSee Figures 3-5 for wiring.ORFigure 1: POE Input Setup using WCA 133 Adapter Cable and the TFP 057 power supply.CAT5 CableT o Phoenix connectors for audio or control, see Figures 7-9 for wiring.Control RS-232TX/RX/GNDCH BLine Level Audio InCH A Line Level Audio In Power InTFP 05748VDCInternationalPower Supply WCA 133CAT5 Cable T o Control or Audio Inputs,See Figures 3-5 for wiring.Figure 2: POE Input Setup using WCA 132 Adapter Cable and the POE 001 or a third party POE Switch.Cabling for InputsIf using the POE 001 power over Ethernet injector, connect either the RJ-45 plug on the WCA 132 or a CAT5 cable directly to the port labeled LAN + DC (See Figure 2).Note that the WCA 132 can be plugged directly into the LAN port, which may not leave enough of a cable run to connect to the audio In all the figures below, check the color coding for the type of CAT5 cable used to determine wire colors if terminating a CAT5 cable.Input WiringNote: The figures below are shown using a WCA 133, but a WCA 132 can be used with the same wiring. In some cables, the yellow wire may be colored green.WCA 133Red - TXWhite - RX Y ellow - GND Black - GND543216789Figure 3: RS-232 Control InputWCA 133Red (In Phase, +)White (Signal, -)Y ellow (GND)Black (GND)123Figure 4: Balanced Line Level Audio for InputOutput DiagramsCAT5 Cable wiring.Control RS-232CH BLine Level CH A Line Level CAT5 CablCAT5 CablFigure 6: POE Output Setup using a WCA 131 Adapter Cable and the IR T2 back panel.Output WiringWCA 131Pin 1 - Red - TXPin 2 - White - RXPin 3 - Y ellow - GNDPin 6 - Black - GNDGNDTXRXTo ControlPLG 027(included) Figure 7: RS-232 Control OutputWCA 131+GND-Red (In Phase, +)White (Signal, -)Y ellow (GND)Black (GND)+GND-To Ch A or Ch BLine Level Audio InFigure 8: Balanced Line Level Audio OutputWCA 131+GND-+GND-Red (In Phase, Ch A +)White (Ch A GND)Y ellow (In Phase, Ch B+)Black (Ch B, GND)+GND-+GND-To Ch ALine Level Audio InTo Ch BLine Level Audio InFigure 9: Unbalanced Line Level Audio Output*******************/ 800-843-3544 / INTL: +1-952-943-2252Connecting Audio, Power and ControlProviding power, audio and control options simultaneously requires two CAT5 cable runs. T o run the power and control, you will need either the POE KT1 or POE KT2, depending on how you wish to power the device.If you are using the provided power supply (TFP 057), connect the power to a WCA 133 from POE KT1. If you are using POE switch or power supply, connect the power to a WCA 132 from POE KT2.When powering the IR T2, connect the WCA 131 to the CAT5 cable with the powered WCA 132 or WCA 133. Connect the WCA 131 to the Power In and Control inputs on the IR T2.Run a separate CAT5 (or higher) cable connected to a balanced audio source on one end. Connect the other end to the IR T2 following the wiring diagram below.Refer to the wiring diagrams throughout this document for your specific configuration needs.Control RS-232CH BLine Level CH A Line Level a TFP 057 power supply or POE power supply or switch.Connect Control to the powered cable.Two CAT5 cables need to be run to the IR T2Connections to the IR T2RS232 Control and Power Note: Use of this product with power supplies not provided by the manufacturer voids the warranty of the product (see IR T2 user guide [MAN 217] for further details about warranty coverage).For additional technical support, please contact T echBlue by calling +1-800-328-6190 or visit .。
YKGF真空测量控制仪说明书
YKGF真空测量控制仪说明书 1、功能特点 24位AD采集,五位数码管显示激励5V/100mA,可同时接4支传感器。 采集速度1~100次/秒可设置,提高控制精度。具有自动计算显示峰值谷值功能。 继电器报警、加料、减料控制输出。可选电压、电流输出,作为变送或控制输出。 测量电压范围:±19、5mv 采样方法:delta-sigma 稳定后分辨率:5/10000 显示量程范围:0-99999 通讯接口:RS485通讯接口,标准MODBUSRTU通讯协议 2、传感器的连接 本显示器适用所有的电阻应变式传感器。 传感器的输出信号非常微弱,请尽量缩短信号电缆长度,禁止将信号电缆与动力线扎在一起,仪表可能受到干扰。 传感器的走线一定要套金属管,且金属管要可靠接地,金属管主要起屏蔽与防护作用。 传感器自带的电缆不能剪断,传感器与接线端子一定要可靠连接,接触不良将导致数据跳动或不准。 请不要将仪表的激励电压用作它用,否则可能导致仪表显示值跳动。 3、主要技术指标 此称重模块是标准的Modbus协议,可以连接各种PLC(信捷,台达,西门子,松下的例程),人机界面(威纶通,信捷,MCGS昆仑通态,Samkoon显控,Kinco步科)。 4、使用适当的电源线,确认电源线的额定电压或电流都能满足要求,如果不够的话,可能会引起漏电或火灾。 特别注意:新系统初次使用或更换了仪表或传感器后,一定要先标定后才能使用。 5、八种工作方式: A1:称重加物料控制1个电机。 A2:称重加物料控制2个电机。 A3:称重加物料控制3个电机。 A4:称重加物料控制4个电机。 P1:控制料仓保持一定的重量(如搅拌机)。d1/d2/d3:称重减物料控制(1-3个电机)。FZ:对峰值报警。 Pv:对实时测量值报警。
DMF-1微功率检测发送机使用说明书
DMF-1微功率检测发射仪使用说明书中装集团重庆地质仪器厂DMF-1微功率检测发射仪使用说明书一、用途:DMF-1微功率检测发射机具有两个独立的功能,第一可做DJS 系列接收机的信号源(即模拟器)部分,可以用来标定DJS系列接收机。
第二功能可做微功率的发射机,用来检测各种岩样(和激电仪接收机配合),另一方面可用于野外测量矿体露头。
二、技术指标及面板设置1、面板设置●供电接线柱A、B●外接高压线●模拟信号输出接线柱M、N●电源开关,拨到上面为开机●发射检测选择开关●视极率MS值开关●一次电位测程开关●供电时间选择拨轮开关●数字电流表2、技术指标●输出模拟信号供分6档,即3mV、10mV、30mV、100mV、300mV、1000mV。
●输出视极化率分为4档0%(零极化),即3%、10%、50%●模拟输出波形为正负比梯波,占空比为1:1。
●周期选择:取用拨轮开关,供电方波脉宽1~15秒(周期4~60秒)。
3、其它●工作温度:-10℃~50℃,95%RH。
●储存温度:-20℃~60℃●仪器电源:1号电池(或同样规格的镉镍电池)6节●体积:225×115×90三、操作步骤:(一)模拟器功能:将检测发射开关打向检测方向1、装好仪器供电电池;2、选好测程电压值:如100mV;3、确定所测极化率Ms值:如3%;4、将模拟电压MN接线柱与接收机输入接线对应连接好;5、确定模拟信号电压脉宽,拨动拨轮选择供电时间,如2,为2秒(周期8秒),此脉宽应同接收机一致,方可同步;6、打开仪器电源,模拟器便开始工作;7、如有要改变供电脉宽,需按拨轮,“十”号为增加,“-”号为减少;(右拨轮为个位数字,左拨轮为十位数字)。
要改变供电电压,调整一次场测程开关;要改变极化率,拨动极化率开关,最大供电脉宽界为15秒。
8、仪器电源电压≥7.8V为好。
9、对接收机DJS-8的检测,要把模拟器预置参数,如脉宽2,接收机的供电时间,也应预置为2秒。
OCD系统数字对准系统仿真和跟踪性能分析
21 0 第 3期 ( 第 1 2期 ) 1年 总 2
O D系统数 字 对 准 系统 仿真 和跟 踪 性 能分 析 C
C.Ra h l n c o a d A.P  ̄il o l ol
过 去 的三 年 里 ,JL致 力 于设 计 研 究 P
具有高传输速率且复杂程度降低的光学通 信终端 , 称之为 O D系统。O D系统 利用 C C 少 量 的探测 和 控制 元 件 就 能达 到微 弧 度 量 级 的光 束 对 准 。在 O D系统 中 , 标 的搜 C 信 索、 信标 的跟踪 、 发射和接 收光束校准 以及 发射 光 束 的提 前对 准 功 能都 是 通过 一 个 扫 描振镜和一个 C D实现的。为使系统的水 C 平达到更高 , 并研 究应用 中的光端 机间光 通信 的性能 , 以对 O D系统性能进行研 所 C 究是 很 重要 的 。过 去 的 19 9 8下 半 年 中 , 在 Tbe和 Srw e 之 间 用 O D 作 为 发 射 al t b ̄ a C 端机 进行 了地 面对 地 面光 通 信链 路 的一 系 列试 验 。位 于 S w e y的 O D系 统 接 收 昀 br r C 4 里 外 Tbe设 立 的 0 6米发 射 天 线 发 O公 al . 射 的多光束信标 。受大气效应 的影 响, 信 标 光 能 量 和 位 置 都 有 变 动 。 在 外 场 测 试 中, 大气衰 减 和波 面 畸 变 的情 况 下 , 别控 判 制 环 的性 能变 得非 常重 要 。 本 文讲 述 了 O D数 字 控 制 环 系 统 的 C 设 计 和性 能 。包 括 扫 描 振 镜 , C C D跟 踪 探
备改 进扫 描振 镜充 分 提 高跟 踪 性 能 。为 评 估 跟踪性 能 , 现将 系 统 软 件 修 改 成 可 以 收 集振镜 、 振镜 电学 系统 、 机成 象 子 系 统 的 相 性 能数据 。系统 在 开环 和 闭环 模 式 都 进 行
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
典型的传函仪
测试仪器——以EROS型光学传递函数测定仪为例 EROS型光学传递函数测定仪是国际上应用较为广泛的 利用光电傅里叶分析法原理的OTF测量仪器,已形成 包括几种型号的一系列产品,以适应各种测量环境和 测量准确度的要求。
11 1 2 3 5 4 6 7 8 9 12 13 10
1-光源 2-聚光镜 3-可变滤光片 4-可变狭缝 5-平行光管物镜 6-被测物镜 7-空间频率狭缝 光源 聚光镜 可变滤光片 可变狭缝 平行光管物镜 被测物镜 空间频率狭缝 8-透镜 9-旋转光栅扫描器 10-半反半透镜 11-目视观察镜 12-聚光镜 13-光电接收器 透镜 旋转光栅扫描器 半反半透镜 目视观察镜 聚光镜 光电接收器
设光栅扫描速度为V,则有 u ' = Vt ,光通量随时间变化 的频率 rt = rV ,于是有:
4 i ( t ) = I 0 1 + MTF ' ( r ) cos [2 π rt t − PTF ( r ) ] π 14 − MTF ' ( 3 r ) cos [2 π(3 rt ) t − PTF ( 3 r ) ] 3π ⋅ 1 4 + MTF ' ( 5 r ) cos [2 π(5 rt ) t − PTF ' ( 5 r ) ] − ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ 5π
狭缝的影响
而实际上狭缝总会有一定宽度,用狭缝扫描正弦光栅像时, 探测到的信号是像函数与狭缝函数的卷积
i1 (u1 ' ) = ∫ s (u ' )i (u1 '−u ' )du '
−∞
∞
= I 0 + I a ⋅ MTF (r ) ⋅ MTF1 (r ) cos[2πru1 '− PTF (r ) − PTF1 (r )]
2、测量OTF的基本环节: • 光学目标发生器:以典型激励图形为单元,组成空 间变化的物面标准图形。通过合适的光路投射到被 测系统上作为理想的物函数; • 目标像检测器:利用光检测器测量被待测系统空间 调制了的目标物函数,得到反映像面光强分布的时 序信号; • 目标像频谱分析器:对表示像面光强分布的实现电 信号进行频谱分析,解调出待测的光学传递函数。
光学系统传递函数测试方法
——传函仪 传函仪
讲演人: 讲演人:解来运 学 号:09S021017
主要内容
• • • • • 发展历史及意义 基本概念 传递函数原理 几种典型传函仪 发展趋势
发展历史及意义
• 光学仪器在科学史上的作用是巨大的 • 设计和制造更多高质量的光学仪器是我们的目标
• 科学地检验和评定光学系统 • 历史上常用方法有:鉴别率、星点法等 —主观 性、不全面 • 1938年“正弦板法”—德国人菲利塞(Frieser) • 1946年“傅里叶变换法”—法国人杜费 (Duffieux)
以下是几种小型小型传函仪产品
发展趋势
目前研制OTF/MTF仪器的理论基础已经非常 完善,因此今后的发展重点应是:如何更好 的利用计算机技术、光电转换传感器和图像 采集器件,结合不断发展的图像处理技术, 快速准确的处理测得的数据,增大测量范围, 包括空间频率、焦距范围等等。
谢谢老师和同学!
光学系统的普遍模型 入射光瞳、出射光瞳——光瞳函数 (相干光脉冲响应函数 ) 光瞳函数 相干光照明景物的成像 —相干传递函数 (点扩展函数) 相干传递函数 非相干光照明景物的成像—非相干传递函数 非相干传递函数 非相干传递函数的归一化(规范化) OTF——光学传递函数(相 光学传递函数( 非相干传递函数的归一化(规范化)——OTF OTF 光学传递函数 干和非相干光学系统传递函数的关系)
基本概念
do
di
光学系统普遍的模型
对光学系统成像性能的要求,可分为两个主要方面:第一方 面是光学特性,包括焦距、放大率等;第二方面是成像质量,光 学系统所成的像应该足够清晰,物像相似,变形要小。 成像质量评价的方法分为两大类,第一类用于在光学系统实 际制造完成以后对其进行实际测量,第二类用于在光学系统还没 有制造出来,即在设计阶段通过计算就能评定系统的质量。 由于光学传递函数能全面反映光学系统的成像性质,因此, 可以用它来评价成像质量。除了共轴系统的轴上点而外,像点的 弥散图形一般是不对称的,因此,不同方向上的光学传递函数也 不相等。为了全面表示该像点在不同方向上的光学传递函数,必 须用一个三维空间曲面来表示。为了简化,和前面研究几何像差 的方法相似,我们用于午和弧矢两个方向上的光学传递函数曲线 来代表该像点的光学传递函数。实践证明,决定光学系统成像质 量的主要是振幅传递函数,因此,一般只给出振幅传递函数曲线, 而不考虑位相传递函数。
由于正弦光栅较难制作,后来又提出用矩形光栅 代替正弦光栅作为扫描屏,通过电学滤波的方法把信号 中的高次谐波滤掉同样可实现这种模拟运算,这种用非 正弦光栅作扫描屏的方法被称为光电傅里叶分析法。 把所得到的形状与扩散函数形状相似的电信号, 直接进行频谱分析就可以得到光学传递函数,这种方法 被称为电学傅里叶分析法。 用狭缝或者刀口屏直接对狭缝像进行线扩散函数 抽样,把抽样数据送到计算机进行包括傅里叶变换在内 的数学运算,也可以得到光学传递函数,这种方法被称 为数字傅里叶分析法。 上面这些方法都是通过在像面上扫描来测量的, 所以统称为扫描法。扫描法是实际应用得最多的方法。
利用电学方法将基频成分选出,而将高次谐波和直流成分 一并滤掉,所得到的交流信号为: i (t ) = 4 I MTF ' ( r ) cos [2 πr t − PTF ( 容易从其振幅和初位相中得到空间频率为r的MTF(r) 和PTF(r)。如果用一系列不同空间频率的矩形光栅扫描, 就可以得到调制传递函数和相位传递函数。
其中
MTF1 (r ), PTF ' (r )
是狭缝函数s(u’)傅立叶变换的模和辐角。 而对确定宽度的狭缝的模和辐角是可以计算的,因而 很容易修正上述测试数据。
扫描方式
根据卷积的傅立叶变换关系,有:
I1 (r ) = O(r ) S (r )OPT (r )
上式说明,为了得到 I1(r),狭缝和光栅是可以互换 位置的,即用光栅扫描狭缝的像与用狭缝扫描光栅 的像是等价的。实际测量系统中,总是用光栅扫描 狭缝像。 由于正弦光栅较难制作,可以用矩形光栅代替正弦 光栅作为扫描屏,通过电学滤波的方法把信号中的 高次谐波滤掉同样可实现这种模拟运算。
测试方法 • 到目前为止,已经有许多种建立在不同原理基础上的测 试光学传递函数的方法。可以把这些方法简单地分成扫 描法和干涉法两大类。 1)扫描法 • 根据定义式,只要能对被测光学系统形成的线扩散函数 实现傅里叶变换,就可以测量到它在某一方向上的光学 传递函数。 • 早就有人提出可以用一狭缝作为目标物,在它经被测系 统的像(其光强分布为线扩散函数)上用正弦光栅作为 扫描屏,就可以模拟上述对线扩散函数的傅里叶变换运 算,得到光学传递函数,这种方法通常被称为光学傅里 叶分析法。
自转
自转:扫描 公转:变频
公转
物狭缝像
θ
x
扫描变频原理图
准直镜
狭缝分划板
聚光镜
选频放大
PMT 光源 扫描转鼓 频率扩展器 被测物镜
结构示意图
Optikos公司典型MTF测试装置 Optikos公司典型MTF测试装置 公司典型MTF
Image Science大型MTF测试仪 Science大型MTF测试仪 大型MTF
三种光学系统:
(1)理想光学系统(点物成点像) (2)衍射受限光学系统(点物成衍射斑) (3)有象差光学系统(点物成衍射斑)
三个传递函数
调制传递函数(MTF):表示系统对不同空间频率 光分布的传输函数; 相位传递函数(PTF):表示系统对不同空间频率 光分布的相位推移; 光学传递函数(OTF):表征滤波器对其中的光学 信息进行滤波变换的能力。
• 1948年“光学传递函数”—美国电视工作者赛德 (O.Schade) • 1962年英国霍普金斯(H.H.Hopkins )将光学传递函数 (Optical transfer function—OTF)用于光学设计。 无论在光学测量还是在光学设计中,现在都普遍认 无论在光学测量还是在光学设计中, 为光学传递函数是一种评价光学系统成像质量较为 完善的指标。 完善的指标。 光学传递函数概念在应用光学领域中, 光学传递函数概念在应用光学领域中,已经如同几 何像差和波像差那样被大家所熟悉。 何像差和波像差那样被大家所熟悉。
测试原理
• 按照线扩散函数和以正弦光栅成像为基础的光学传递 函数的定义,一个正弦光栅经过被测光学系统时,其 像分布为:
i (u ′) = I 0 + I a ⋅ MTF (r ) cos[2πru '− PTF (r )]
• 如果在像面上用宽度极小的狭缝扫描正弦光栅的像, 那么可以探测到严格的像分布i(u‘),也就可以测量到 MTF (r)和PTF (r) 。其中r是光栅的空间频率。
EROS-200型传函仪光学系统 EROS-200型传函仪光学系统
测试仪器 • 光学系统可以分为目标发生器和傅里叶分析器两部件。 –目标发生器:由被测物镜将物狭缝成像在旋转光栅上。 –傅里叶分析器:实现物狭缝像和光栅之间相对扫描,有 效扫描孔随时间变化的光通量由光电倍增管接收后变成 电信号。 有效扫描孔 • 变频的实现 空间频率狭缝
2)干涉法 由于光学传递函数和光瞳函数之间有确定的转换关系,所以 通过测量得到光瞳函数P(x,y),就可以间接得到光学传递 函数。因为光瞳函数是复函数,它主要包含了出射光瞳处波 面的相位信息。很显然通过使该波面与一标准参考波面相干 涉,或者使该波面本身产生剪切干涉,利用干涉图就可以找 到保留相位信息的光瞳函数。 根据全息干涉的原理,通过透镜的傅里叶变换作用,可以把 被测系统光瞳函数的频谱记录在全息图上。然后再经过一次 透镜的傅里叶变换,在它的频谱面上就可以得到两维的光学 传递函数。这种方法可称为全息干涉法。