机械结构设计(实用)
机械结构设计规范

机械结构设计规范编制审核批准发布日期目次1常用标准件优选清单2常用外购件优选清单3钣金件设计规范4焊接件设计规范5铸件设计规范6机加件设计规范7公差设计规范8便于装配、维护及可靠性设计规范9外观设计/表面处理规范10技术要求规范11常用材料及图样标注12结构设计检查表3.1弯曲棱边应与切割边垂直。
如不能保证,应在弯曲棱边和切割边的交汇处设计一个R 大于2倍板厚 的圆角。
如图1所示。
It 则卿竣过湾啡边情孔辻距理奪囱E 边的距划•童曲半径*2店的薄抵呈鼻改宙逹计沁设计 1 常用标准件优选清单常用标准件优选清单见附件,产品常用紧固标准件优选清表。
2 常用外购件优选清单2.1 选用原则满足性能指标,供货稳定,供货周期不超过2个月;性价比优,能够用其他品牌及型号替换 2.2 滚珠丝杆类 台湾TBI 、台湾上银 2.3 直线导轨类:台湾上银 2.4 减速器:2.4.1行星减速器:德国纽卡特(NEUGART ) 2.4.2 蜗轮蜗杆减速器:台湾成大3 钣金件设计规范S13.2弯曲棱边与槽孔棱边的距离应大于弯曲半径加2倍壁厚的距离,或者让槽孔横跨整个弯曲棱边。
如图2所示。
3.3复杂结构应组合制造。
将复杂结构分拆成几件简单结构,再组焊在一起。
如图3所示。
两亍结构坤拼芸第3页/共11页谡谖设计4焊接件设计规范图'4.1 几何连续性原则4.3焊缝根部优先受压焊缝根部有裂纹,易产生缺口作用。
焊缝根部承受拉载荷能力V 承受压载荷能力。
如图6所示。
应避免在几何突变处设置焊缝。
如果不能避免,则设定过渡结构。
如图4所示。
4.2避免焊缝重叠 应避免多条焊H闻轉阳皓构B875铸件设计规范5.1铸件壁厚宜薄、小,大的实体结构宜用空腔结构。
5.2应避免铸件厚薄不均。
5.3铸件应设计为受压件,不宜设计为受拉件。
5.4铸件应有排气孔。
5.5应减小后续加工余量。
6机加件设计规范6.1机加件应设退刀槽。
外螺纹退刀槽宽度宜设为三1.6倍螺距,内螺纹退刀槽宽宜设为度三2倍螺距。
直角坐标机器人结构设计
直角坐标机器人结构设计摘要随着现代工业的不断发展,不但使传统工业的生产发生了根本性的变化,而且也对人类社会的生产产生了重大的影响。
机器人作为现代工业生产的一种工具,不仅大大的提高了生产力,而且把人从各种生产环境中解放出来。
目前,许多国家的工业机器人技术得到很好的发展,我国也在进行深入的研究和开发。
本文主要是设计一个搬运工件的直角坐标机器人,它可以应用在自动化生产线上与人工相比具有速度快、定位精度准确的特点,具有很强的实用性能。
作为直角坐标机器人结构设计,本文用了第二、三、四章详细阐述了设计过程,第五章简要介绍了机器人的控制部分,第六对机器人进行了效果分析,并总结了直角坐标机器人的特点。
设计不拘泥于常规,使产品具有更广阔的发展空间,必将成为机器人的发展趋势。
Cartesian Robot DesignAbstractWith the continuous development of modern industry,not only the production of traditional industries has undergone a fundamental change, but also the production of human society has had a major impact. Robot as a tool of modern industrial production, not only greatly increase the productivity and the production environment from a variety of liberation. Currently, many countries have very good industrial robot technology development, China is also in-depth research and development. Porters of this paper is to design a piece of the Cartesian coordinate robot, which can be used in automated production lines and artificial compared to fast, accurate positioning accuracy characteristics,with strong practical performance.As the design of the right-angle coordinate robot,the text uses the second the third and the forth chapters to say the process of the design.The five chapter briefly describes some of the robot's control. The sixth chapters carried out effectiveness analysis and summarizes the characteristics of a Cartesian coordinate robot.The design makes the products have much more development,which must be the current of robot's development.Key words: Straight line Cartesian coordinate Structure目录摘要 (I)ABSTRACT (II)一绪论 01.1直角坐标机器人概念 01.2直角坐标机器人的应用及分类 (2)1.3当前机器人技术的发展 (2)1.3.1机器人发展的概况 (2)1.3.2直角坐标机器人的发展情况 (5)1.4设计基本步骤 (5)1.5本文研究的主要内容 (6)二直角坐标机器人的工作原理 (7)2.1实现三个自由度运动的基本原理 (7)2.2末端执行器抓取工件的基本原理 (7)2.2.1概述 (7)2.2.2手指式手部的工作原理 (8)三直角坐标机器人结构设计 (10)3.1直角坐标机器人外形方案的确定 (10)3.2直角坐标机器人传动及驱动方式的选择 (10)3.2.1直角坐标机器人传动方式的选择 (10)3.2.2直角坐标机器人驱动方式的选择 (11)3.3直角坐标机器人外形尺寸的确定 (11)3.4传动部件、驱动部件类型及主要参数的选择 (12)3.4.1传动部件参数的选择 (12)3.4.2驱动部件的选择 (19)3.5其它辅助部件的设计 (22)3.5.1直线导轨的选择 (22)3.5.2滚动轴承的选择 (23)3.5.3机器人拖链的选择 (24)3.5.4其它部件的设计 (24)3.6机械手结构设计 (24)3.6.1机械手的结构特点 (24)3.6.2机械手的手部尺寸及抓取范围 (25)3.6.3机械手传动装置的设计 (25)3.6.4机械手驱动装置的选择 (27)3.6.5机械手其它部件的选择 (27)四机器人的校核及结构的可靠性分析 (28)4.1轴承的校核 (28)4.2各主要功能部件的可靠性分析 (28)4.3各自由度间连接件的可靠性分析 (29)4.4轴的校核计算 (30)五机器人的控制 (32)5.1步进电机的概况 (32)5.2步进电机的工作原理 (32)5.3步进电机的控制 (33)六直角坐标机器人的效果分析及技术评价 (34)6.1直角坐标机器人的效果分析 (34)6.1.1直角坐标机器人与人工操作的比较 (34)6.1.2采用机器人工作带来的问题 (34)6.2直角坐标机器人结构的技术评价 (34)6.2.1整体结构技术评价 (34)6.2.2零件的技术分析 (35)参考文献 (37)一绪论1.1直角坐标机器人概念直角坐标机器人概念:工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度建成空间直角关系、多用途的操作机。
机械设计之导轨的结构布局设计
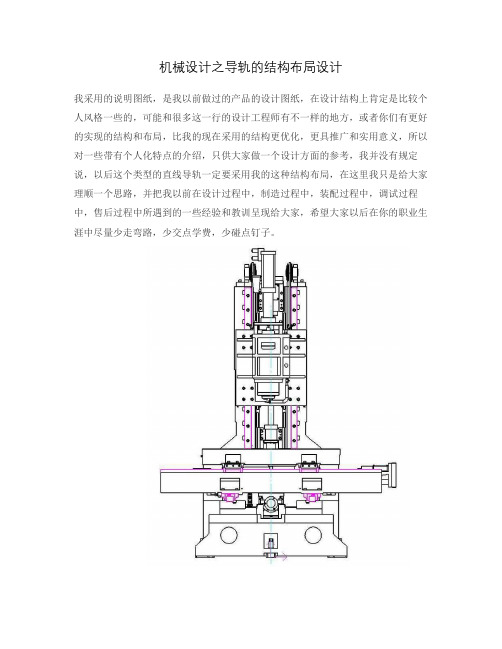
机械设计之导轨的结构布局设计我采用的说明图纸,是我以前做过的产品的设计图纸,在设计结构上肯定是比较个人风格一些的,可能和很多这一行的设计工程师有不一样的地方,或者你们有更好的实现的结构和布局,比我的现在采用的结构更优化,更具推广和实用意义,所以对一些带有个人化特点的介绍,只供大家做一个设计方面的参考,我并没有规定说,以后这个类型的直线导轨一定要采用我的这种结构布局,在这里我只是给大家理顺一个思路,并把我以前在设计过程中,制造过程中,装配过程中,调试过程中,售后过程中所遇到的一些经验和教训呈现给大家,希望大家以后在你的职业生涯中尽量少走弯路,少交点学费,少碰点钉子。
这是一台立式加工中心的光机图纸,其中紫色线条部分就该加工中心的X、Y、Z 三相直线导轨的布置位置,他们的功能就是实现该加工中心X、Y、Z三个方向的传动。
其中X、Y两个方向是水平放置的,而Z向是垂直放置的,这个在直线导轨选型的时候,是需要和导轨供应商确认好放置方式的,你必须告诉供应商你的导轨是用于什么样的状态,是水平,还是垂直,或者是悬空等,供应商在给你做定型推荐的时候,他们也会根据你的使用情况来推荐给你最时候的直线导轨。
再上一张图纸,我们从侧面来看一下,这X、Y、Z三个方面的导轨布局是一个什么样的情况。
如果你是一个有相当经验的机械行业从业者,其实你是应该可以根据上面这两个图纸画出这个立式加工中心的大件图纸了,因为无论是改设备的结构,还是外形,这两张图纸都作了很好的呈现,尤其是一些细节也有了相对详细的描述。
以上给你参考的是一个光机装配图,在一些细节上的表述我会在接下来的图纸里给大家介绍。
我们今天抽取这个立式加工中心的底座来给大家介绍,下面还是要上图说话。
以上这张图就是一个底座的直线导轨装配图,紫色的部分就是导轨的装配状态,在设计的过程中,需要注意的是导轨的跨度的选取,即两条导轨之间的距离,这在某种程度上决定了机床加工的刚性和稳定性,也决定了机床精度的稳定性,同时我们还需要考虑一个关键点,那就是润滑油的聚集与回收,因为这种类型的机床,直线导轨和丝杆都是采用润滑站进行定时定点润滑的,所以润滑后的废油如何收集是一个需要考虑的关键点,如果不作这方面的考虑,那机床在正常使用时,润滑油会四处横流,弄脏一地,这也是体现设计能力和工业水准的地方。
毕业设计(论文)-上肢康复机器人结构设计及运动仿真-有图纸
第1章绪论全套完整版19张CAD图纸,联系1538937061.1 概述据报道,我国60岁以上的老年人已有1.43亿,占全国人口的11%,到2050年将达到4.37亿。
在老龄人群众中有大量的脑血管疾病或神经系统疾病患者,这类患者多数伴有偏瘫症状[1]。
近年由于患心脑血管疾病使中老年患者出现偏瘫的人数不断增多,而且在年龄上呈现年轻化趋势。
与此同时,由于交通运输工具的迅速增长,因交通事故而造成神经心痛损伤或者肢体损伤的人数也越来越多。
在我国数以百万计的有神经科疾病病史和受到过意外伤害的患者需要进行康复治疗,仅以中风为例,每年大约有600,000中风幸存者,其中的二百万病人在中风后存在长期的运动障碍。
随着国民经济的发展,这个特殊群体已得到了更多人的关注,为了提高他们的生活质量,治疗、康复和服务于他们的产品的技术和质量也在相应地提高。
随着机器人技术和康复医学的发展,在欧洲、美国和日本等国家,医疗康复机器人的市场占有率呈逐年上升的趋势,仅预测日本未来机器人市场,2005年医疗、护理、康复机器人的市场份额约为250,000美元,而到2010年将上升到1,050,000美元,其增长率在机器人的所有应用领域中占据首位。
因此,服务于四肢的康复设备的研究和应用有着广阔的发展前景[2]。
康复机器人是康复设备的一种类型。
康复机器人技术早已广受世界各国科研工作者和医疗机构的普遍重视,其中以欧美和日本的成果最为显著。
在我国康复医学工程虽然得到了普遍的重视,而康复机器人研究仍处于起步阶段,一些简单康复器械远远不能满足市场对智能化、人机工程化的康复机器人的需求,有待进一步的研究和发展。
由于康复训练机器人要与人体直接相连,来带动肢体进行康复训练,所以对驱动器的安全性、柔性的要求较高。
康复肢体运动功能用机械肢体组合系列机器人,是多种同类机器人属于机器人领域,解决了本人发明的实用新型专利半身不遂患者康复学步机,只能带动人的大小臂大小腿康复运动功能,而不能带动手脚各关节运动的重大不足,主要技术特征是将半身不遂患者康复学步机略加改进后,在学步机的小臂绞链杆上安装了可以带动人手腕关节手指各个关节都能运动的机械手托板,在小腿铰链杆上安装了可以带动人脚踝脚指各个关节都能运动的机械脚托板后实现的,用途是康复肢体运动功能,带动患肢的各个关节、每块骨骼、每块肌肉、每个筋键、每条神经都在作患者万分渴望而大脑又支配不了的动作,通过较长时间的被动运动锻炼,最终使残疾人患肢的主动运动功能得到康复。
机械设计—轴上零件的固定及工艺结构知识点大汇总(非常好)

⑤弹性挡圈定位——结构简单、紧凑, 能承受较小的轴向力,但削弱轴的强度 ⑥紧定螺钉定位 ——结构简单、调整灵 活,能承受的轴向力较小。
(7) 止动垫圈固定 ——固定可靠,但轴上须 切削螺纹和纵向槽。一般用细牙螺纹,以减 少对轴的销弱,常用于固定轴端零件。 (8)圆锥面定位——轴和轮毂之间无径向 间隙、装拆方便,能承受冲击,但锥面 加工较为麻烦。
3、轴上有螺纹时,应有退刀槽;需要磨削的阶梯轴,应留 有越程槽。 4、为了便于轴的加工,必要时应设置中心孔。
5、轴上有多个键槽时,尽可能用同一规格尺寸,并安排在同 一直线上。
四、 提高轴的强度和刚度的措施 (1) 减小应力集中,提高轴的强度。在零件截面发生
变化处会产生应力集中现象,从而消弱材料的强度。因此, 进行结构设计时,应尽量减小应力集中。在阶梯轴的截面尺 寸变化处应采用圆角过渡,且圆角半径不宜过小。在圆角半 径受到限制时,可采用卸载槽,如图14.15(a)所示;过渡肩 环,如图14.15(b)所示或凹切圆角,如图14.15(c)所示的结 构形式。
2、切削加工工艺性 1)螺纹退刀槽
2)砂轮越程槽
具体数据查手册
3)轴端倒角
4)多个键槽
思考题:指出图中结构不合理地方,并予以改正。
讨论题
1、分析如图2所示的1、2、3、三处的结构错误,并将错误原因和改 进方案填入下表:
序号 1 2 3
错误原因 ①键太长 ②键槽位置不便加工 齿轮无法轴向固定 轴承装配不可靠
改进方案 ①键长略短于带轮轮毂长度 ②两键槽应加在同一直线上 使L略小于B 使轴颈长度略超出轴承
2、轴上零件的周向定位和固定
周向固定的目的: 为了传递运动和转矩,防止零件与轴产生相对的转动。
采用键、花键、销、过盈配合等方式,其结构形式、 特点与应用见表16-3。 1)键 2)花键
机械毕业设计(论文)_家用清扫机器人的结构设计全套图纸】
湘潭大学兴湘学院毕业设计说明书题目:家用清扫机器人的结构设计专业:机械设计制造及其自动化学号: 2010962923____姓名:___________指导教师:________完成日期: 2014年5月20日____全套图纸,加153893706湘潭大学兴湘学院毕业论文(设计)任务书论文(设计)题目:家用清扫机器人的结构设计学号:2010962923 姓名:专业:机械设计制造及其自动化指导教师:系主任:一、主要内容及基本要求主要内容:家用清扫机器人的动力源是电动机,通过电机连接蜗杆转动从而能带动蜗轮转动,再通过带传动将动力传导到清扫机构的皮带轮上,然后通过皮带轮带动清扫轴转动,清扫轴转动同时带动底部直接联动的两毛刷反向向内旋转,将灰层集中于吸口处,并由吸口吸入,清扫机器人的清扫吸由一个电机传动的风扇提供,灰尘被吸到垃圾储藏盒中,只要将垃圾储藏盒取出,即可完成垃圾的清理。
清扫机器人的移动动力由两个相同的直流电机驱动,为使电机转动速度便于控制,电机上装有减速器,使得动力平稳与适当。
基本要求:最高运行速度:0.5m/s,高度:100mm,直径:400mm清洁方式:扫刷,吸尘;次性充电连续工作时间:0.8小时二、重点研究的问题家用清扫机器人的结构设计和参数确定;电动机的选用;蜗轮蜗杆的选择和参数计算;带传动的设计及带的选取等;四、应收集的资料及主要参考文献[1] 机械设计手册编委会. 机械设计手册[M]. 北京:机械工业出版社,2004[2] 罗迎社主编. 材料力学[M]. 武汉:武汉理工大学出版社,2007[3] 于骏一邹青编主编. 机械制造技术基础[M]. 北京:机械工业出版社,2004[4] 濮良贵、纪名刚主编. 机械设计[M]. 北京:高等教育出版社,2006[5] 周良德朱泗芳杨世平主编. 现代工程图学[M]. 长沙:湖南科学技术出版社,2008[6] 岑军健主编. 新编非标准设备设计手册[M]. 北京:国防工业出版社,1999[7] 吴宗泽宋宝玉主编. 机械设计课程设计指导书[M]. 北京:高等教育出版社,2009[8] 杜祥琪编著. 工业机器人及其应用[M]. 北京:机械工业出版社,1986[9] 关慧贞冯辛安主编. 机械制造装备设计[M]. 北京:机械工业出版社,2011[10] 邹青编. 机械制造技术基础课程设计指导教程[M]. 北京:机械工业出版社,2004[11] 王秀贵曹江莲编著. C语言程序设计教程[M]. 北京:中国铁道出版社,2008[12] 新版机械设计手册[M]. 北京:机械工业出版社,2004[13] 章小兵,宋爱国地面移动机器人的研究现状及发展趋势.机器人技术与应用,2005,2[14] 宗光华等编著. 机器人的创意设计及实践[M]. 北京:北京航空航天大学出版社,2004,60-68[16] 蔡自兴主编. 机器人学[M]. 北京:清华大学出版社湘潭大学兴湘学院毕业论文(设计)评阅表学号2010962923 姓名专业机械设计制造及其自动化毕业论文(设计)题目:家用清扫机器人的结构设计湘潭大学兴湘学院毕业论文(设计)鉴定意见学号:2010962923 姓名专业:机械设计制造及其自动化毕业论文(设计说明书)43 页图表9 张目录摘要 (1)第一章前言1.1题目要求 (3)1.2国内外产品研究状况 (4)1.2.1 国外产品研究状况 (4)1.2.2 国内产品研究状况 (9)1.2.3 自主充电技术研究现状 (10)1.3研究的目的和意义 (11)1.4设计的重点和难点 (11)第二章家庭清洁机器人的关键技术2.1传感技术 (12)2.2路径规划技术 (12)2.3吸尘技术 (12)2.4电源技术 (13)第三章清洁机器人的机械设计3.1机械结构组成和工作原理 (13)3.1.1 机械结构组成 (14)3.1.2 工作原理 (16)3.2清洁机器人总体设计 (17)3.2.1 机器人外形设计 (17)3.2.2 机器人的行走机构设计 (18)3.2.3 清扫机构的设计 (18)3.2.4 吸尘机构设计 (21)3.2.5 垃圾收集处理机构设计 (22)第四章具体计算4.1电机选择 (24)4.2 蜗轮蜗杆的选择 (25)4.3 清扫机构电机的选择 (26)4.4 家用清扫机器人电池的选用 (26)4.5 清扫机构中蜗杆上轴承的寿命的计算 (27)4.6 清扫机构中涡轮轴的校核 (28)第五章总结和展望5.1 发展趋势 (30)5.1.1 高度智能化 (30)5.1.2 功能扩展 (30)5.1.3 低成本化 (30)5.2展望 (30)参考文献 (31)致谢 (32)附录 (33)外文文献 (33)中文翻译 (40)摘要服务机器人已经渗透了我们的生活、工作和经济各方面,并且起到了很大的作用。
《机械设计》实验四(轴系结构实验)
综合性实验指导书实验名称:轴系结构实验实验简介:轴系主要包括轴、轴承和轴上零件,它是机器的重要组成部分。
轴的主要功用是支持旋转零件和传递扭矩。
轴的设计一方面要保证具有足够的工作能力,即满足强度、刚度和振动稳定性等要求。
另一方面,要根据制造、装拆使用等要求定出轴的合理外形和全都结构尺寸,即进行轴的结构设计。
轴承是轴的支承,分为滚动轴承和滑动轴承两大类。
滚动轴承已标准化,设计时只需根据工作条件选择合适的类型和尺寸,并进行轴承装置的设计。
通过本实验学生将进一步定性地对轴系设计结构理论进行深入了解。
适用课程:机械设计实验目的:了解并正确处理轴、轴承和轴上零件间的相关关系,如轴与铀承及轴上零件的定位、固定、装拆及调整方式等,以建立对抽系结构的感性认识并加深对轴系结构设计理论的理解。
面向专业:机械类实验项目性质:综合性(课内必做)计划学时: 2学时实验要求:A预习《机械设计》等课程的相关知识点内容;B预习《机械设计实验指导书》中实验目的、原理、设备、操作步骤或说明,并写出预习报告;实验前没有预习报告者不能够进行实验;C 进行实验时衣着整齐,遵守实验室管理规定、学生实验守则、仪器设备操作规定等相关规定,服从实验技术人员或实验教师的指导与管理。
知识点:A《机械设计》课程传动轴内容;B 《机械设计》课程键、螺纹连接内容;C《机械设计》课程滚动轴承内容;D 《机械设计》课程齿轮传动内容; E 《机械设计》课程蜗轮蜗杆传动内容;F《机械设计》课程润滑、密封内容;G《机械制图》课程相关知识内容。
实验分组:1人/组《机械设计》课程实验实验四轴系结构实验一、概述轴系主要包括轴、轴承和轴上零件,它是机器的重要组成部分。
轴的主要功用是支持旋转零件和传递扭矩。
它与轴承孔配合的轴段称为轴颈,安装传动件轮毂的轴段称为轴头,联接轴颈和轴头的轴段称为轴身。
轴颈和轴头表面都是配合表面,须有相应的加工精度和表面粗糙度。
轴的设计一方面要保证具有足够的工作能力,即满足强度、刚度和振动稳定性等要求。
机械结构设计准则及实例

机械结构设计准则及实例发布时间:2021-01-29T11:15:59.797Z 来源:《建筑科技》2020年8月上作者:郭闻阜[导读] 机械制造业改革的关键期,应具体落实机械结构科学化设计工作,以便为设计实践提供正确指导,全面提升机械产品质量。
机械结构设计期间,客观掌握设计要点及设计要求,并遵循设计准则。
本文围绕实例具体介绍机械结构设计准则的实践体现,旨在为相关设计人员提供理论指导,推动机械行业可持续发展。
富士康工业互联网股份有限公司郭闻阜摘要:机械制造业改革的关键期,应具体落实机械结构科学化设计工作,以便为设计实践提供正确指导,全面提升机械产品质量。
机械结构设计期间,客观掌握设计要点及设计要求,并遵循设计准则。
本文围绕实例具体介绍机械结构设计准则的实践体现,旨在为相关设计人员提供理论指导,推动机械行业可持续发展。
关键词:机械结构;设计准则;实例引言:近年来,机械产品功能日益丰富化,并且产品质量、效能被提出较高要求,为更好地满足机械结构现代化设计要求,务必动态创新机械结构设计准则,取得低成本、高效率、高质量的设计效果。
发展主义视域下,深层次解读机械设计准则内涵,为机械结构规范化设计给予新思路,确保机械行业更好地顺应时代发展。
1.机械结构设计特点及要求1.1特点第一,复杂性。
机械结构设计活动交叉推进,一旦单体设计环节出现问题,那么整体设计效果会受到影响。
实际设计环节,要求设计人员树立全局意识,灵活运用设计知识分析机械结构部件设计要点,将整体设计环节的安全风险及时排除[1]。
第二,关键性。
设计图对施工、安装等行为起到引导作用,如果设计环节出错,那么设计图在设计实践中的参考价值将大打折扣,不利于优化整体设计效果。
第三,多解性。
在满足机械结构功能需求的前提下,设计方案不止一种,考虑多种因素后选择适宜设计方案。
1.2要求机械产品设计期间,应客观分析工业发展现状,结合现有生产条件灵活运用先进技术、渗透最新设计理念,确保设计完成的机械产品达到质效兼备、经济实用、结构创新等要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.1。
1机械结构设计的任务机械结构设计的任务是在总体设计的基础上,根据所确定的原理方案,确定并绘出具体的结构图,以体现所要求的功能。
是将抽象的工作原理具体化为某类构件或零部件,具体内容为在确定结构件的材料、形状、尺寸、公差、热处理方式和表面状况的同时,还须考虑其加工工艺、强度、刚度、精度以及与其它零件相互之间关系等问题.所以,结构设计的直接产物虽是技术图纸,但结构设计工作不是简单的机械制图,图纸只是表达设计方案的语言,综合技术的具体化是结构设计的基本内容。
5。
1。
2机械结构设计特点机械结构设计的主要特点有:(1)它是集思考、绘图、计算(有时进行必要的实验)于一体的设计过程,是机械设计中涉及的问题最多、最具体、工作量最大的工作阶段,在整个机械设计过程中,平均约80%的时间用于结构设计,对机械设计的成败起着举足轻重的作用。
(2)机械结构设计问题的多解性,即满足同一设计要求的机械结构并不是唯一的.(3)机械结构设计阶段是一个很活跃的设计环节,常常需反复交叉的进行。
为此,在进行机械结构设计时,必须了解从机器的整体出发对机械结构的基本要求5.2机械结构件的结构要素和设计方法5。
2。
1结构件的几何要素机械结构的功能主要是靠机械零部件的几何形状及各个零部件之间的相对位置关系实现的.零部件的几何形状由它的表面所构成,一个零件通常有多个表面,在这些表面中有的与其它零部件表面直接接触,把这一部分表面称为功能表面。
在功能表面之间的联结部分称为联接表面。
零件的功能表面是决定机械功能的重要因素,功能表面的设计是零部件结构设计的核心问题。
描述功能表面的主要几何参数有表面的几何形状、尺寸大小、表面数量、位置、顺序等。
通过对功能表面的变异设计,可以得到为实现同一技术功能的多种结构方案。
5。
2.2结构件之间的联接在机器或机械中,任何零件都不是孤立存在的。
因此在结构设计中除了研究零件本身的功能和其它特征外,还必须研究零件之间的相互关系。
零件的相关分为直接相关和间接相关两类。
凡两零件有直接装配关系的,成为直接相关.没有直接装配关系的相关成为间接相关。
间接相关又分为位置相关和运动相关两类。
位置相关是指两零件在相互位置上有要求,如减速器中两相邻的传动轴,其中心距必须保证一定的精度,两轴线必须平行,以保证齿轮的正常啮合。
运动相关是指一零件的运动轨迹与另一零件有关,如车床刀架的运动轨迹必须平行于于主轴的中心线,这是靠床身导轨和主轴轴线相平行来保证的,所以,主轴与导轨之间位置相关;而刀架与主轴之间为运动相关。
多数零件都有两个或更多的直接相关零件,故每个零件大都具有两个或多个部位在结构上与其它零件有关。
在进行结构设计时,两零件直接相关部位必须同时考虑,以便合理地选择材料的热处理方式、形状、尺寸、精度及表面质量等.同时还必须考虑满足间接相关条件,如进行尺寸链和精度计算等。
一般来说,若某零件直接相关零件愈多,其结构就愈复杂;零件的间接相关零件愈多,其精度要求愈高.例如,轴毂联接见图5。
1。
5.2.3结构设计据结构件的材料及热处理不同应注意的问题机械设计中可以选择的材料众多,不同的材料具有不同的性质,不同的材料对应不同的加工工艺,结构设计中既要根据功能要求合理地选择适当的材料,又要根据材料的种类确定适当的加工工艺,并根据加工工艺的要求确定适当的结构,只有通过适当的结构设计才能使所选择的材料最充分的发挥优势。
设计者要做到正确地选择材料就必须充分地了解所选材料的力学性能、加工性能、使用成本等信息。
结构设计中应根据所选材料的特性及其所对应的加工工艺而遵循不同的设计原则。
如:钢材受拉和受压时的力学特性基本相同,因此钢梁结构多为对称结构。
铸铁材料的抗压强度远大于抗拉强度,因此承受弯矩的铸铁结构截面多为非对称形状,以使承载时最大压应力大于最大拉应力,图示5。
2为两种铸铁支架比较。
钢结构设计中通常通过加大截面尺寸的方法增大结构的强度和刚度,但是铸造结构中如果壁厚过大则很难保证铸造质量,所以铸造结构通常通过加筋板和隔板的方法加强结构的刚度和强度。
塑料材料由于刚度差,铸造后的冷却不均匀造成的内应力极易引起结构的翘曲,所以塑料结构的筋板与壁厚相近并均匀对称。
对于需要热处理加工的零件,在进行结构设计时的要求有如下几点:(1)零件的几何形状应力求简单、对称,理想的形状为球形。
(2)具有不等截面的零件,其大小截面的变化必须平缓,避免突变。
如果相邻部分的变化过大,大小截面冷却不均,必然形成内应力。
(3)避免锐边尖角结构,为了防止锐边尖角处熔化或过热,一般在槽或孔的边缘上切出2~3mm的倒角。
(4)避免厚薄悬殊的截面,厚薄悬殊的截面在淬火冷却时易变形,开裂的倾向较大。
5。
3.1机械结构设计的基本要求机械产品应用于各行各业,结构设计的内容和要求也是千差万别,但都有相同的共性部分。
下面就机械结构设计的三个不同层次来说明对结构设计的要求。
1.功能设计满足主要机械功能要求,在技术上的具体化.如工作原理的实现、工作的可靠性、工艺、材料和装配等方面。
2.质量设计兼顾各种要求和限制,提高产品的质量和性能价格比,它是现代工程设计的特征.具体为操作、美观、成本、安全、环保等众多其它要求和限制。
在现代设计中,质量设计相当重要,往往决定产品的竞争力.那种只满足主要技术功能要求的机械设计时代已经过去,统筹兼顾各种要求,提高产品的质量,是现代机械设计的关键所在。
与考虑工作原理相比,兼顾各种要求似乎只是设计细节上的问题,然而细节的总和是质量,产品质量问题不仅是工艺和材料的问题,提高质量应始于设计.3.优化设计和创新设计用结构设计变元等方法系统地构造优化设计空间,用创造性设计思维方法和其它科学方法进行优选和创新。
对产品质量的提高永无止境,市场的竞争日趋激烈,需求向个性化方向发展。
因此,优化设计和创新设计在现代机械设计中的作用越来越重要,它们将是未来技术产品开发的竞争焦点。
结构设计中得到一个可行的结构方案一般并不很难。
机械设计的任务是在众多的可行性方案中寻求较好的或是最好的方案。
结构优化设计的前提是要能构造出大量可供优选的可能性方案,即构造出大量的优化求解空间,这也是结构设计最具创造性的地方.结构优化设计目前基本仍局限在用数理模型描述的那类问题上。
而更具有潜力、更有成效的结构优化设计应建立在由工艺、材料、联接方式、形状、顺序、方位、数量、尺寸等结构设计变元所构成的结构设计解空间的基础上。
5。
3。
2机械结构基本设计准则机械设计的最终结果是以一定的结构形式表现出来的,按所设计的结构进行加工、装配,制造成最终的产品。
所以,机械结构设计应满足作为产品的多方面要求,基本要求有功能、可靠性、工艺性、经济性和外观造型等方面的要求。
此外,还应改善零件的受力,提高强度、刚度、精度和寿命.因此,机械结构设计是一项综合性的技术工作。
由于结构设计的错误或不合理,可能造成零部件不应有的失效,使机器达不到设计精度的要求,给装配和维修带来极大的不方便。
机械结构设计过程中应考虑如下的结构设计准则。
1.实现预期功能的设计准则2。
满足强度要求的设计准则3.满足刚度结构的设计准则4.考虑加工工艺的设计准则5。
考虑装配的设计准则6。
考虑造型设计的准则5。
3。
2机械结构基本设计准则1. 实现预期功能的设计准则产品的设计主要目的是为了实现预定的功能要求,因此实现预期功能的设计准则是结构设计首先考虑的问题。
要满足功能要求,必须做到以下几点。
(1)明确功能:结构设计是要根据其在机器中的功能和与其他零部件相互的连接关系,确定参数尺寸和结构形状。
零部件主要的功能有承受载荷、传递运动和动力,以及保证或保持有关零件或部件之间的相对位置或运动轨迹等.设计的结构应能满足从机器整体考虑对它的功能要求.(2)功能合理的分配:产品设计时,根据具体情况,通常有必要将任务进行合理的分配,即将一个功能分解为多个分功能。
每个分功能都要有确定的结构承担,各部分结构之间应具有合理、协调的联系,以达到总功能的实现。
多结构零件承担同一功能可以减轻零件负担,延长使用寿命。
V型带截面的结构是任务合理分配的一个例子。
纤维绳用来承受拉力;橡胶填充层承受带弯曲时的拉伸和压缩;包布层与带轮轮槽作用,产生传动所需的摩擦力.例如,若只靠螺栓预紧产生的摩擦力来承受横向载荷时,会使螺栓的尺寸过大,可增加抗剪元件,如销、套筒和键等,以分担横向载荷来解决这一问题.(3)功能集中:为了简化机械产品的结构,降低加工成本,便于安装,在某些情况下,可由一个零件或部件承担多个功能。
功能集中会使零件的形状更加复杂,但要有度,否则反而影响加工工艺、增加加工成本,设计时应根据具体情况而定。
5。
3.2机械结构基本设计准则2。
满足强度要求的设计准则(1) 等强度准则零件截面尺寸的变化应与其内应力变化相适应,使各截面的强度相等。
按等强度原理设计的结构,材料可以得到充分的利用,从而减轻了重量、降低成本。
如悬臂支架、阶梯轴的设计等。
见图5。
3。
图5。
3(2) 合理力流结构为了直观地表示力在机械构件中怎样传递的状态,将力看作犹如水在构件中流动,这些力线汇成力流。
表示这个力的流动在结构设计考察中起着重要的作用。
力流在构件中不会中断,任何一条力线都不会突然消失,必然是从一处传入,从另一处传出。
力流的另一个特性是它倾向于沿最短的路线传递,从而在最短路线附近力流密集,形成高应力区.其它部位力流稀疏,甚至没有力流通过,从应力角度上讲,材料未能充分利用。
因此,若为了提高构件的刚度,应该尽可能按力流最短路线来设计零件的形状,减少承载区域,从而累积变形越小,提高了整个构件的刚度,使材料得到充分利用。
如悬臂布置的小锥齿轮,锥齿轮应尽量靠近轴承以减小悬臂长度,提高轴的弯曲强度。
图5.4例举几个典型的实例。
(3) 减小应力集中结构当力流方向急剧转折时,力流在转折处会过于密集,从而引起应力集中,设计中应在结构上采取措施,使力流转向平缓。
应力集中是影响零件疲劳强度的重要因素。
结构设计时,应尽量避免或减小应力集中。
其方法在相应的章节会作介绍,如增大过度圆角、采用卸载结构等。
如图5.5。
(4) 使载荷平衡结构在机器工作时,常产生一些无用的力,如惯性力、斜齿轮轴向力等,这些力不但增加了轴和轴衬等零件的负荷,降低其精度和寿命,同时也降低了机器的传动效率。
所谓载荷平衡就是指采取结构措施部分或全部平衡无用力,以减轻或消除其不良的影响.这些结构措施主要采用平衡元件、对称布置等。
例如,同一轴上的两个斜齿圆柱齿轮所产生的轴向力,可通过合理选择轮齿的旋向及螺旋角的大小使轴向力相互抵消,使轴承负载减小。
如图5.6。
5。
3.2机械结构基本设计准则3.满足结构刚度的设计准则为保证零件在使用期限内正常地实现其功能,必须使其具有足够的刚度。