一种平面n构件串联机构工作空间分析方法_李瑞琴
求解3-RRR平面并联机器人工作空间的迭代搜索法

Z u X n—pn ,C i in—k n,Z a g Y a h i ig u a J u hn u n
( o ̄eo eh ncl ni ei ,U i rt o h nh io i c n cnl y S nh i 00 3 hn ) C tg / fm ca i gn r g nv sy fS g frc neadt h o g , h g a 2 0 9 ,C i ae e n e i a a se e o a a
Ab t a t sr c : t e a ay i f r p c o h n l sso k s a e f r3一RRR p rlee o o c a im ,t e i r t e s ac s p tf r r 。 wo a alld rb t me h n s h t ai e r h i u wa d e v o B sd o a e n VB, h a a t cd s n i tra e i b it o 3一R t e p mer e i ne fc ul fr r i g s RR a all b t c a s , n e e rs ac y p o p rlee ro h n m a d t n t e e r h ma r - d o me i h h v d l ee e c sf rp r l l c a im e i n lo ma e a fv r be i tra e f rp r l l c h n s d sg . i e t e r fr n e o a al e me h ns d sg a d as k a o a l n ef c a al e me a im e in l ed n o ed
2 3一I R 平面并联机器人及坐标系 l
机械原理 谢进版 第二版 课后参考答案
BC、CD、AD 四杆中有一杆为虚约束,如果将构件 AD 视为虚约束,去掉虚约束,则点B、 C均为复合铰链,没有局部自由度; (d) 、 F 3n 2Pl Ph 3 4 2 6 0 0 ,系统不能运动,所以也就不是一个机 构。 从图中可以看出, 铰链点 C 是构件 BC 上的点, 其轨迹应当是以铰链点 B 为圆心的圆, 同时,铰链点 C 又是构件 CD 上的点,轨迹应当是移动副 F 约束所允许的直线,两者是矛 盾的,所以,系统不能运动。系统中没有局部自由度、复合铰链、虚约束。 (e) 、F 3n 2Pl Ph 3 5 2 6 3 ,机构没有确定的运动。没有局部自由度、 复合铰链、虚约束。 3-7 计算题 3-7 图所示齿轮-连杆机构的自由度。
邻接矩阵为:
e1 e2 v1 LM v2 v3 v4 1 0 0 1 1 1 0 0
e3 0 1 1 0
e4 0 0; 1 1 v1 AM v2 v3 v4
v1 v2 0 1 0 1 1 0 1 0
v3 0 1 0 1
v4 1 0 1 0
3-3 题 3-3 图为外科手术用剪刀。其中弹簧的作用是保持剪刀口张开,并且便于医生单手操
共 92 页
第3页
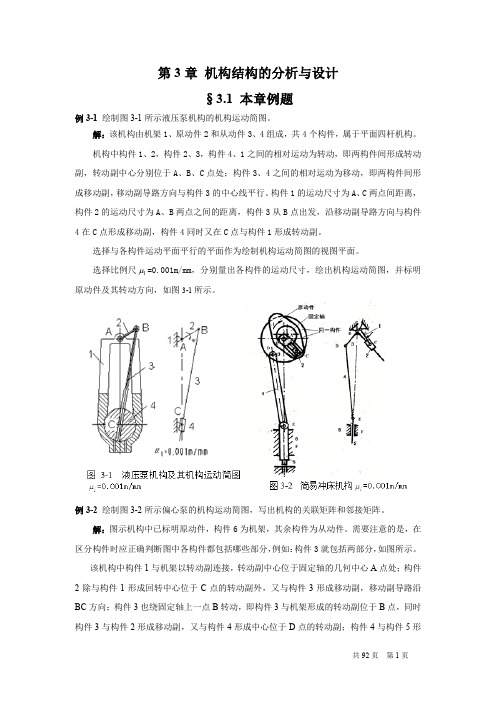
题 3-2 图 解:该机构由机架 4、原动件 1 和从动件 2、3 组成,共 4 个构件,属于平面四杆机构。 机构中构件 1、4,构件 1、2,构件 3、4 之间的相对运动为转动,即两构件间形成转动副, 转动副中心分别位于 A、B、C 点处;构件 2、3 之间的相对运动为移动,即两构件间形成移 动副,移动副导路方向与构件 2 的中心线平行。 原动件 1 相对机架 4 转动, 带动从动件 2 转动的同时, 从动件 2 相对从动件 3 发生移动。 从动件 2 转动的同时也带动了从动件 3 相对机架的转动。 因此, 偏心轮 1 的转动进而使液压 油完成从右边进口处进入并流向左边出口处的整个过程。 选择比例尺 l =0.002m/mm,分别量出各构件的运动尺寸,绘出机构运动简图,并标明 原动件及其转动方向,如题图 3-2 所示。 其机构示意图和机构拓扑图如上图所示。 其关联矩阵为:
双模式可重构并联机构的构型及其在酒盒产线中的应用

双模式可重构并联机构的构型及其在酒盒产线中的应用
张磊;李瑞琴;宁峰平;柴超;崔鑫佳;郭文孝
【期刊名称】《包装工程》
【年(卷),期】2024(45)1
【摘要】目的为实现酒盒生产线上酒盒胶线点胶和酒盒底座清废环节的自动化,提出一种双模式可重构并联机构。
方法基于螺旋理论分析该机构在2种模式下的自由度,利用闭环矢量法和D-H法求得对应模式下的位置逆解,采用数值法求解机构工作空间、灵巧度和转动能力指标,给出该机构的应用实例。
结果该机构在2-
URU/RRC模式下具有3T自由度,2-URU/URC模式下具有3T1R自由度,工作空间连续且无空洞,获得2-URU/RRC模式下灵巧度指标分布规律和2-URU/URC模式下动平台转动能力。
结论该机构在2-URU/RRC模式下可满足胶线点胶作业需求,在2-URU/URC模式下可满足底座清废作业需求,提高了酒盒生产线自动化程度。
【总页数】7页(P201-207)
【作者】张磊;李瑞琴;宁峰平;柴超;崔鑫佳;郭文孝
【作者单位】中北大学机械工程学院;中国煤炭科工集团太原研究院有限公司【正文语种】中文
【中图分类】TB486;TH112
【相关文献】
1.应用于天线座的并联机构构型设计
2.基于构型演变和李群理论的2T2R型四自由度并联机构型综合
3.并联机构应用的领域及其构型研究
4.酒包生产线1R2T并联
机构构型综合及运动学分析5.驱动支链完全解耦的可重构踝关节康复并联机构型综合
因版权原因,仅展示原文概要,查看原文内容请购买。
《机械原理》笔记

《机械原理》*号内容第一章概论第一节本课程的研究内容什么是机器、机构?机器的三特征:1)由一系列的运动单元体所组成。
2)各运动单元体之间都具有确定的相对运动。
3)能转换机械能或完成有用的机械功以代替或减轻人们的劳动。
具有以上1、2两个特征的实体称为机构。
构件——由一个或多个零件连接而成的运动单元体。
零件——机器中的制造单元体。
第二节机构的分析与综合及其方法机构分析:对已知机构的结构和各种特性进行分析。
机构综合:根据工艺要求来确定机构的结构形式、尺寸参数及某些动力学参数。
机构综合的内容: 1.机构的结构综合2.机构的尺度综合3.机构的动力学综合。
机构的结构综合:主要研究机构的组成规律。
机构的尺度综合(或运动学综合):研究已知机构如何按给定的运动要求确定其尺寸参数.概括为四类:(1)刚体导引:当机构的原动件做简单运动时,要求刚体连续地变换其位置。
(2)函数变换:使机构某从动件的运动参数为原动件运动参数的给定函数。
(3)轨迹复演:使连杆上某点的轨迹能近似地与给定曲线复合。
(4)瞬时运动量约束:按构件在某些特定位置时的运动量来设计机构的结构参数。
准点——符合预定条件的几个位置。
只要求几个位置处符合给定条件的机构综合方法称为准点法。
减小结构误差的途径是:合理确定准点的分布。
可按契比谢夫零值公式配置准点。
第三节学习本课的方法1.注意基本理论与基本方法之间的联系2. 用工程观点学习理论与基本方法3.注意加强感性认识和实践性环节第二章机构的结构分析第一节概述构成机构的基本要素——构件运动副运动链运动副:两构件间直接接触且能产生某些相对运动的联接称为运动副。
约束---对构件间运动的限制。
运动副元素—运动副参加接触的部分。
空间运动副和约束的关系。
平面机构中只有Ⅳ级副和Ⅴ级副。
(为什么?)低副---副元素为面接触(如移动副、转动副);高副----副元素为点(线)接触。
运动链---构件由运动副连接而成的系统。
机构—选定机架,给相应的原动件,其余构件作确定运动的运动链。
基于2-RCUCUR并联机构的运动学分析

第43卷第3期包装工程2022年2月PACKAGING ENGINEERING·228·基于2-RCU/CUR并联机构的运动学分析文杰,马春生,刘建国,李瑞琴,屈淑维(中北大学机械工程学院,太原030051)摘要:目的随着产品的种类的丰富,出现了各类产品喷码方式不同的问题。
为使得喷码机适用于不同产品,文中提出一种转动幅度较大的2-RCU/CUR机构,用于多种类产品喷码。
方法应用螺旋理论对2-RCU/CUR机构进行自由度分析,并用改进的G-K公式进行验证,用闭环矢量法对机构的位置分析进行反解,在SolidWorks软件中绘制出机构模型,最后用Matlab软件对机构工作空间编程求解并绘制出工作空间。
结果2-RCU/CUR并联机构具有3个自由度,分别为2个转动自由度和1个移动自由度,在机构的工作空间内,动平台绕y轴的转动可达90°,且在工作空间内没有奇异位型。
结论2-RCU/CUR并联机构结构简单且稳定,工作精度高,工作空间较大,可以适用于多种产品喷码流程,可以提高经济效益。
关键词:2-RCU/CUR;自由度;位置反解;工作空间中图分类号:TB486;TH112 文献标识码:A 文章编号:1001-3563(2022)03-0228-06DOI:10.19554/ki.1001-3563.2022.03.028. All Rights Reserved.Kinematics Analysis Based on 2-RCU/CUR Parallel MechanismWEN Jie, MA Chun-sheng, LIU Jian-guo, LI Rui-qin, QU Shu-wei(School of Mechanical Engineering, North University of China, Taiyuan 030051, China)ABSTRACT: With the variety of products being enriched, the labeling methods for various products are also different.The work aims to propose a 2-RCU/CUR mechanism with large rotation that can be used to label different products, so asto make the marking machines suitable for various products. The degree of freedom of 2-RCU/CUR mechanism was ana-lyzed by screw theory and verified by the improved G-K formula. The closed-loop vector method was used to carry outinverse kinematics on the position of the mechanism, and the mechanism model was drawn in SolidWorks software. Fi-nally, the workspace of the mechanism was programmed and solved by Matlab software and the workspace was drawn bythis software. The 2-RCU/CUR parallel mechanism had three degrees of freedom, two for rotation and one for movement.In the workspace of the mechanism, the rotation of the moving platform reached 90° around the y axis, and there was nosingularity mode in the workspace. The 2-RCU/CUR parallel mechanism has a simple and stable structure, with highworking accuracy and large workspace and can be applied to a variety of product labeling processes to improve the eco-nomic benefits.KEY WORDS: 2-RCU/CUR; degree of freedom; inverse kinematics; workspace收稿日期:2021-06-08基金项目:山西省自然科学基金(201801D121183);山西省回国留学人员科研资助项目(2021-114)作者简介:文杰(1998—),男,中北大学硕士生,主攻机构理论与机器人技术。
4-RRR冗余并联机构工作空间的SimMechanics求解

2017年5月机床与液压 May 2017第 45 卷第9 期MACHINE TOOL &HYDRAULICS Vol.45 No.9 DOI:10.3969/j.issn. 1001-3881. 2017. 09. 0104-RRR冗余并联机构工作空间的SimMechanics求解陆正杰,郝亮亮(河池学院物理与机电工程学院,广西宜州546300)摘要:由于传统的工作空间分析方法局限于理论计算,而工作空间分析是机构设计及运动控制的基础,故采用了 Smi- Mechamcs建立4-RRR冗余并联机构三维仿真实体运动学模型,对工作空间进行仿真研究;利用数值实例以驱动杆和从动 杆的影响因子A为条件采用运动仿真法编程得出了该机构的工作空间。
结果表明:该机构的工作空间具有对称性且内部无 空洞;当A逐渐增大时,该机构的工作空间逐渐增大,当A>0. 6时边界处的空洞增加,机构在边界的奇异位置点增多。
与3-RRR并联机构的工作空间对比,机构的可达工作空间明显增大,这表明引人冗余是一种有效解决3-RRR并联机构的奇异 位形多,增大其工作空间的方法。
关键词:4-RRR冗余并联机构;工作空间;SimMechanics中图分类号:TH112 文献标志码:A 文章编号:1001-3881 (2017) 09-034-4Workspaces Solution of 4-RRR Redundant Parallel Mechanism by SimMechanicsLU Zhengjie,HAO Liangliang(Department of Physics and Electronic Engineering,Hechi University,Yizhou Guangxi 546300, China) Abstract :Because the traditional workspace analysis method is limited to the theoretical computation, and the workspace analysis is the foundation of the mechanism design and the movement control, therefore the SimMechanics was used to established the 4-RRR redundant parallel mechanism three dimensional simulation kinematics model, which workspace was carried on the simulation research. Then the workspace of the mechanism was obtained by using the numerical example to drive the influence factor of the rod and the follower. The results show that the workspace of the mechanism is symmetrical and there is no empty inside ;when A gradually increasing, the workspace of the mechanism increases gradually, when A>〇. 6, the hole at the boundary is increased, the singular position of the mechanism is increased. Compared with the workspace of the 3-RRR parallel mechanism, the reachable workspace of the mechanism is obviously increased, which indicates that the introduction of redundancy is an effective method to solve the singularity of the 3-RRR parallel mechanism, and increase the workspace of the parallel mechanism.Keywords:4-RRR redundant parallel mechanism;Workspaces;SimMechanics〇前言学者的研究表明:与串联机构相比,并联机构具 有奇异位形和有效工作空间小等缺点[1]。
机械原理第10章 空间连杆机构及机器人机构概述
Fig.10-2 Spatial kinematic pairs 2(空间运动副2)
(4)Ⅳ类副 具有4个约束和2个自由度的运动副。图10-3a 所示的球销副中,由于球销的约束,仅保留2个转动自由 度。运动副符号如图10-3b所示,名称用S′表示。图10-3c中 的圆柱副中,仅保留沿轴线的移动和绕轴线的转动自由度, 运动副符号如图10-3d所示,名称用C表示。Ⅳ类运动副在 空间机构中应用较广泛。
10.1 空间连杆机构概述
1.空间连杆机构中的运动副
(1)Ⅰ类副 图10-1a所示的球放在平面上,形成点接触的高副,仅提供沿 二者公法线n—n方向的一个约束。 (2)Ⅱ类副 具有2个约束、4个自由度。图10-1b所示的圆柱平面副中,提 供沿z轴移动和绕x轴转动的2个约束,用CE表示圆柱平面副。图10-1c所 示的球槽副中,提供沿z轴移动和沿x轴移动2个约束,用SG表示球槽副, 它们是典型的Ⅱ类副。Ⅱ类副也很少应用。
例10-3 计算图10-8所示开链机器人机构自由度。
Fig.10-8 Open link robot mechanism (开链机器人机构)
10.2 机器人机构概述
1.串联机器人机构
串联机器人大都是开链机构,图10-9a所示机器人是3个 转动副、3个构件组成的串联机器人,也简称3R串联机器人。 串联机器人机构可以是平面开链机构,也可以是空间开链 机构。串联机器人一般由底座、腰部、大臂、小臂和腕部 组成,分别对应腰关节、肩关节、肘关节和腕关节。图109b为其机构简图。
Fig.10-3 Spatial kinematic pairs 3(空间运动副3)
(5)Ⅴ类副 具有5个约束、1个自由度的运动副。图10-4a所示的转动 副中,仅有一个绕轴线的转动自由度,运动副代表符号如图10-4b所示, 名称用R表示。图10-4c所示移动副中,仅有1个沿导路方向的移动自 由度,运动副代表符号如图10-4d所示,名称用P表示。图10-4e所示的 螺旋副中,沿轴线的移动和绕轴线的转动线性相关,所以只有1个移 动自由度,代表符号如图10-4f所示,名称用H表示。
平面并联机构工作空间的三维螺旋扫描CAD求解

1引言少自由度并联机器人相较于6自由度并联机器人,可以满足大多数工业操作的需要,机构的复杂度和成本较低,运动学和动力学模型较简单,控制较容易。
因此,少自由度并联机器人具有广阔的应用前景。
目前,关于少自由度并联机器人的研究、开发和应用工作正在日益广泛深入地进行中,许多研究成果已经逐步应用于科研实验和生产中,取得了很好的经济和社会效益[1]。
工作空间作为并联机构性能的重要指标之一,直观地显示了机构末端执行器的工作能力,在一定程度上对并联机器人操作器的设计、控制、校准等综合优化都起着至关重要的作用。
相较于串联机构,并联机构的工作平面并联机构工作空间的三维螺旋扫描CAD求解申旭阳1,侯志利2,秦慧斌1,吴霄11.中北大学先进制造技术山西省重点实验室,太原0300512.太原理工大学机械工程学院,太原030024摘要:针对平面并联机构无奇异位置工作空间求解困难、过程繁琐、计算量大等问题,提出了基于CAD求解平面并联机构工作空间的三维螺旋扫描方法。
将n自由度平面并联机构分解成n条支链进行独立分析,得到每条支链下末端执行器的可达区域,再将所有支链可达区域取交集即为平面并联机构工作空间。
应用SolidWorks软件建立平面并联机构模型,进行几何特征处理,通过自动求解器求解,将求解过程图形化,快速得到同轴布局5R机构和平面3-RPR并联机构的无奇异位置工作空间。
通过同轴布局5R机构的运动学实验,验证了该求解方法的可行性。
关键词:平面并联机构;计算机辅助设计(CAD);三维螺旋扫描法;无奇异位置工作空间文献标志码:A中图分类号:TP242doi:10.3778/j.issn.1002-8331.1806-0232申旭阳,侯志利,秦慧斌,等.平面并联机构工作空间的三维螺旋扫描CAD求解.计算机工程与应用,2019,55(1):256-260. SHEN Xuyang,HOU Zhili,QIN Huibin,et al.Three dimensional helical scanning CAD for workspace of planar parallel puter Engineering and Applications,2019,55(1):256-260.Three Dimensional Helical Scanning CAD for Workspace of Planar Parallel MechanismSHEN Xuyang1,HOU Zhili2,QIN Huibin1,WU Xiao11.Shanxi Key Laboratory of Advanced Manufacturing Technology,North University of China,Taiyuan030051,China2.College of Mechanical Engineering,Taiyuan University of Technology,Taiyuan030024,ChinaAbstract:In view of the difficulty of solving the workspace of the planar parallel mechanism without singularity position, the tedious process and the large amount of calculation,a three-dimensional spiral scanning method for the working space of planar parallel mechanism which bases on CAD is proposed.The planar parallel mechanism of n degree is decomposed into n branch chain for independent analysis.The reachable area of the end of each branch chain is obtained,and the inter-section of all the reachable area of the branch chain is the workspace of the planar parallel mechanism.The model of planar parallel mechanism is established by using SolidWorks software,and the geometric feature is processed.The solution process is solved by automatic solver.The solution process is graphed,and the non singular position workspace of the coaxial layout5R mechanism and the planar3-RPR parallel mechanism is quickly obtained.The solution is verified by the kinematics experiment of the coaxial layout of the5R machine.Key words:planar parallel mechanism;Computer-Aided Design(CAD);three-dimensional helical scan;singularity-free workspace基金项目:先进制造技术山西省重点实验室开放基金(No.XJZZ201703);山西省研究生教育创新项目(No.2018177)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011 年增刊
当 3 1 时,
max l2 l3 , l4 VL4 l1 l4
lv 4,v
1600-VL4 2400-VL4
1-基座;2-肩关节;3-大臂;4-肘关节;5-中臂;6-α 关节;7-小臂; 8-β 关节;9-末端臂;10-末端执行器 图 3 机械臂机构示意图 O
n
l l1 l2 l3 l n 1 l n 1 1 i ln ln ln ln ln i 2 ln
(1)
收稿日期:2011-8-10 基金项目:山西省自然科学基金资助项目(2010011036-1)
88
李瑞琴等:一种平面 n 构件串联机构工作空间分析方法 当 i (i 4, , n) 为零时,VLn 最短;当 i (i 4,, n) 为 时,VLn 最长,具体计算公式如下:
② VL4 l1 l4
lv4’,v5’ VL4-2400 lv2,v3 VL4-1600 lv
(a) 工作空间
参考文献:
i 2
2 VL5 l4 (VL4 ) 2 2l4 (VL4 ) cos 5max(VLn ) , ln min(VLn ) ,
n 1 。ln 的取值不同时会导致有两种不同的结果,即 ln 为
(2)
此时, 四杆机构的类型取决于虚 最短杆或者 ln 为第二短杆, 拟构件 VL 的长度。
Abstract: Orientation rotatability characterized by orientation angle workspace is an essential factor associated with robot manipulators. This paper presented a new approach for analyzing and synthesizing the orientation angle workspace of planar serial n-link manipulator. By introducing a virtual equivalent mechanism, the open-chain kinematic problem is converted into a close-chain mechanism, and the Grashof-type condition is used to examine the rotatability of the end-effector link. This method was applied to the design of a garden pruning robot which is a planar serial 4-link manipulator. The application research and analysis approach have practical significance for the design of a highly dexterous serial 4-link manipulator with proposed link relations. Key words: Grashof criterion, planar serial 4-link manipulator, orientation angle workspace, virtual equivalent mechanism
lv 2,v 3
1600+VL4
lv1
S
P 2400+VL4
由于作业空间对于该机器人的设计很重要, 根据实际测 量一般的作业对象在平面 XOYO 投影的直径为 0.5-4.0m,一 般的绿篱和园林修剪高度为 1.0-4.0m。 根据以上要求,由 n 杆操作机灵活工作空间分析理论可知,第六种情况的工作 空间最灵活, 故本文采用这种情况下的杆长参数, 并将杆长 初步定为如下:l1=2000(mm), l2=1500(mm), l3=1000(mm), l4=400(mm)。 虚拟构件 VL4 的长度计算如下:
2 2 VLn ln 1 (VLn 1 ) 2ln 1 (VLn 1 ) cos n
系,以及 l1、 n 、VLn 最大值,该机构可以分为 6 种情况, 如表 1 所示。
3
n 杆操作机构工作空间分析
下面以第一种情况为例, 简要的介绍 n 杆操作机构工作
l2 l3 ≤VLn ≤ li
此时末端构件ln.仍为为最短杆,并且l1是最长杆: 转动能力γ0计算如下:
SB 3 l1 VLn ln , SC 3 l1 VLn ln , SC 2 l1 VLn ln , S A1 l1 VLn ln
当点 P 从最远点沿径向向 O 点移动时,运动空间 [ l1 VLn ln , l1 VLn ln ]被分为几个子区间: lv1:, lv4',v5':,
lv 4,v 5
O A1
lv1
P B3 S
此时末端构件 ln.为最短杆,具有 360转动能力:
图 2 Case 1-1( VLn>ln)的工作空间范围
max l2 l3 , ln ≤VLn ≤ li
i2
n 1
(4)
各边界点计算如下:
(3) lv4, v5 l1 VLn ln , l1 VLn ln
lv
(a) 工作空间
VL4 l2 2 l32 2l2 l3 cos 4
当 β4 去不同的数值时,VL4 的长度范围如下:
(6)
(b) 三维图 图 5 机器人工作空间
l2 2 l32 2l2 l3 ≤VL4 ≤ l2 2 l32 2l2 l3
(7)
VL4>l1>l4. ① VL4 l1 l4
绿化地区的树木, 为了满足现代高速公路绿化标准和现代园 林设计标准, 需设计出能把树木修剪成球柱形、 球形、 矩形、 锥形等形状的机器人执行机构, 因此该机械臂的末端执行机 构必须有很大灵活工作空间。 整个结构为平面串联开链关节 型,有四个旋转关节(如图 1 所示) ,五个自由度,其中基
89
机 械 设 计 与 研 究 座转动关节实现机器人本体除基座以外的机构的转动; 肩关 节带动进行俯仰转动,以满足机器人工作空间上高度的要 求;大臂、中臂、小臂、末端执行器均可在允许的范围内运 动。
2011 年增刊
机械设计与研究 Machine Design and Research
一种平面 n 构件串联机构工作空间分析方法
李瑞琴,赵耀虹,肖登红,梁晶晶 (中北大学 机械工程与自动化学院,太原 030051,E-mail: lrq-dyt@)
摘要:工作空间分析对于平面串联机构的设计很重要。提出了一种用于分析 n 构件工作空间的方法,通过引入
2 VL4 l2 l32 2l2l3 cos 4
根据末端构件 ln 和虚拟构件 VLn 最小值之间的长度关 表1 Case 1 l1 ln ρn (1)当 VLn > ln 各杆长的关系为: 被分为 5 个区间: l1>max(VLn) ln>min(VLn) ρn>1 Case 2 l1>max(VLn) ln>min(VLn) ρn<1 n 杆机构的分类情况 Case 4 l1>max(VLn) ln<min(VLn) ρn>1 Case 5 l1<max(VLn) ln>min(VLn) ρn<1 Case 6 l1<max(VLn) ln<min(VLn) ρn<1 Case 3 l1>max(VLn) ln<min(VLn) ρn<1
1 引
言
y
l2
4
VL4
l3
5
VL5
l4
工作空间是从几何方面讨论机器人的工作性能。分析
工作空间是确定机器人手臂的结构形状和参数必须的过程。 机器人的工作空间定义为: 机器人操作臂正常运行时, 末端 执行器坐标系的原点能在空间活动的最大范围, 这一空间又 称为可达空间。 在总工作空间内, 末端执行器可以任意姿态 达到的点构成的工作空间称为灵活工作空间。 本课题前期工 作已经推推导了平面 n 杆机构(杆长:l1>l2>l3>…>ln-1>ln) 的工作空间灵活度的计算公式。
据计算可得:1600<VL4<2000. 工作空间如下:
lv6 δ lv5,v lv2,v3 2400-VL4 l lv1
代入数
(a) 工作空间
O
S -1600+VL 1600+VL4 P 2400+VL4
(a) 工作区间
(b) 工作空间三维图 图 6 机器人工作空间
90
李瑞琴等:一种平面 n 构件串联机构工作空间分析方法
l1 VLn ln .
lv 2,v 3
C2 lv C3
工作空间如下所示,
n 1 n 1 max li 2ln , max l2 l3 , ln ≤VLn ≤ li i2 i2
(3) (2) lv2, v3 l1 VLn ln , l1 VLn ln
O lv6 lv5,v6 VL4-1600 lv lv2,v3 lv1 S
l1>VL4>l4
此时存在两种情况: 当 3 1 时, VL4 的取值范围如下:
δ 2400-VL4
1600+VL4 P 2400+VL4
max max l1 l4 , l4 , max l4 , l2 l3 , l1 l4 41 VL4 min l1 , li i 2