过程控制系统及仪表:1402第2章被控对象特性
被控对象动态特性
第二节 描述对象特性的参数
前面讨论了描述对象特性的方法,那么如何简洁地描述对象的主要特征, 例如在输入作用下输出随时间变化的快慢程度以及最终变化的数值大小呢? 常用三个物理量放大系数K、时间常数T、纯滞后时间τ来表示对象的特性, 这些物理量称为对象的特性参数。 一 放大系数K与时间常数T
T dh h KQ1 dt
Q1 Q2 A dh dt
Q1 Q1 Q10
Q2 Q2 Q2 0
Q2 h
将液位与流出量之间的非线性特性线性化。线性化方法是将非线性项进 行泰勒级数展开,并取线性部分。只在某一稳态点附近小范围内有效。
Q2 h Q20 dQ2 | hh0 (h h0 ) Q20 h dt 2 h0
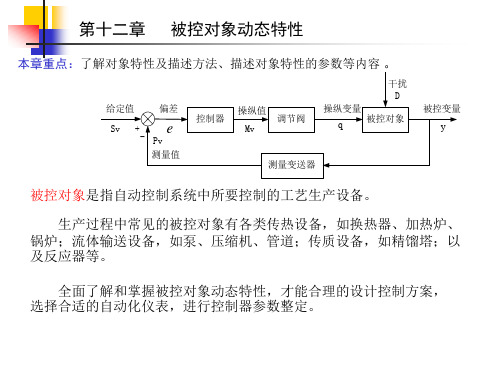
干扰 D 给定值 Sv + 偏差 - Pv 测量值 Dv
e
控制器
操纵值 Mv
操纵变量 调节阀 q 被控对象
被控变量 y
测量变送器
第一节 对象特性及描述方法
二 对象特性的描述方法 建立对象数学模型的基本方法有机理法和测试法。
(一)机理法
用机理法建模就是根据生产过程的内在机理,写出各种有关的平衡方程 如:物料平衡方程、能量平衡方程、动量平衡方程、相平衡方程等,推 导出代表对象动态特性的微分方程。 对复杂对象的机理法建模需要进行合理的假设与简化。 下面通过一个简单的例子来讨论如何用机理法建模。
Q1
1
0 h
h ( )
0.632h ( )
(a)
t
h
储槽对象
2
Q2
0
T
(b)
t
阶跃响应曲线
第二节 描述对象特性的参数
二 纯滞后时间τ
过程控制系统与仪表课后习题答案完整版汇总

第 1 章思考题与习题1-1过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制?解答:1.控制对象复杂、控制要求多样2.控制方案丰富3.控制多属慢过程参数控制4.定值控制是过程控制的一种主要控制形式5.过程控制系统由规范化的过程检测控制仪表组成1-2什么是过程控制系统?典型过程控制系统由哪几部分组成?解答:过程控制系统:一般是指工业生产过程中自动控制系统的变量是温度、压力、流量、液位、成份等这样一些变量的系统。
组成:参照图 1-1。
1-4说明过程控制系统的分类方法,通常过程控制系统可分为哪几类?解答:分类方法说明:按所控制的参数来分,有温度控制系统、压力控制系统、流量控制系统等;按控制系统所处理的信号方式来分,有模拟控制系统与数字控制系统;按控制器类型来分,有常规仪表控制系统与计算机控制系统;按控制系统的结构和所完成的功能来分,有串级控制系统、均匀控制系统、自适应控制系统等;按其动作规律来分,有比例( P)控制、比例积分( PI)控制,比例、积分、微分( PID )控制系统等;按控制系统组成回路的情况来分,有单回路与多回路控制系统、开环与闭环控制系统;按被控参数的数量可分为单变量和多变量控制系统等。
通常分类:1.按设定值的形式不同划分:(1)定值控制系统(2)随动控制系统(3)程序控制系统2.按系统的结构特点分类:(1)反馈控制系统(2)前馈控制系统(3)前馈—反馈复合控制系统1-5什么是定值控制系统?解答:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。
1-6什么是被控对象的静态特性?什么是被控对象的动态特性?二者之间有什么关系?解答:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性。
被控对象的动态特性:。
系统在动态过程中,被控参数与控制变量之间的关系即为控制过程的动态特性。
二者之间的关系:1-7试说明定值控制系统稳态与动态的含义。
为什么在分析过程控制系统得性能时更关注其动态特性?解答:稳态:对于定值控制,当控制系统输入(设定值和扰动)不变时,整个系统若能达到一种平衡状态,系统中各个组成环节暂不动作,它们的输出信号都处于相对静止状态,这种状态称为稳态(或静态)。
化工仪表及自动化第二章调节对象特性
KQ1= h2+(T1 +T2)(dh2/dt)
h2
+ T1 T2(d2h2/dt2)
化工仪表及自动化第二章调节对象
特性
对象特性的实验测取
• 一、 实验测取法步骤: 1 . 使系统处于相对稳定 2. 加入阶跃干扰同时记录被调参数变化。 3 .根据记录绘制系统过度曲线。 二、分类: 1. 阶跃反映曲线。 2. 脉冲反映曲线 3. 矩形脉冲反映曲线。
第二章 过程特性及其数学模型
➢化工过程的特点及其描述方法 ➢对象特性的实验测取 ➢对象数学模型的建立 ➢描述对象特性的参数 ➢总结;例题
化工仪表及自动化第二章调节对象 特性
§2-1 调节对象特性及其描述
➢定义:当一个被控对象受到调节作用和干扰作用后,
被控参数如何变化,是否变化,变化大小,变化的快 慢等。
其中:Q2=C C——常数
由此可得:
Q2
Q1= Q2 +A (dh/dt) 或:
h=(1/A) (Q1-C)dt
化工仪表及自动化第二章调节对象 特性
示例三: 二阶对象
Q1 h1
Q2
由物量守恒定律可得:
(Q1 - Q12)dt = A1dh1 (Q12 - Q2)dt = A2dh2 由此可得:
R2Q1= h2+(A1R1 +A2R2)(dh2/dt) + A1 R2 A2 R2(d2h2/dt2)
入与输出关系;
2. 动态数学模型 描述的是在输入量改变以后,输出量 跟随变化的规律;
3. 动态数学模型是更精确的模型,静态数学模型是 动态数学模型在对化工象仪表达及自到动化平第二衡章调时节对的象 特例。
特性
系统的动态特性
第二章_对象特性和建模

23
第二节 机理建模
举例
溶解槽及其 反应曲线
纯滞后时间
显然, 与皮带输送机的传送速度v和传送距 显然,纯滞后时间τ0与皮带输送机的传送速度 和传送距 L 有如下关系: 离L有如下关系: 有如下关系 τ = (2-16) )
0
v
24
第二节 机理建模
x为输入量 为输入量
x (t − τ 0 ), y= 0, t ≥τ0 t ≤τ0
Y (s ) bm s m + bm −1 s m −1 + ⋅ ⋅ ⋅ + b1 s + b0 G (s ) = = X (s ) a n s n + a n−1 s n−1 + ⋅ ⋅ ⋅ + a1 s + a0
(2-8) )
13
第一节 数学模型及描述方法
对于一阶对象,由式 (2-4)两端取拉氏变换,得 对于一阶对象, (2-4)两端取拉氏变换, 两端取拉氏变换
过程的输入、 图2-1 过程的输入、输出量
3
?
第一节 数学模型及描述方法
过程的数学模型分为静态数学模型和动态数学模型
基础
静态数学模型
特例
动态数学模型
4
第一节 数学模型及描述方法
用于控制的数学模型( 、 )与用于工艺设计与分析 工艺设计与分析的数学 用于控制的数学模型(a、b)与用于工艺设计与分析的数学 控制的数学模型 模型( )不完全相同。 模型(c)不完全相同。 一般是在工艺 流程和设备尺 寸等都确定的 情况, 情况 , 研究过 程的输入变量 程的 输入变量 是如何影响输 出变量的。 出变量的。
对象可以用一阶微分方程式来描述, 对象可以用一阶微分方程式来描述, 但输入变量与 输出变量之间有一段时滞τ 输出变量之间有一段时滞 0
自动化控制与仪表第二章过程特性
描述过程特性的参数
W (t ) KQ(1 e )
将上式对时间求导,可得:
t dW K Q eT dt T 由上式可以看出,被控变量的变化速度随时间的增长而逐渐变慢。 在t=0时有: dW K Q W () t 0 温度变化的 dt T T
t T
初始速度
W
W(∞)
⑹ 标准化。即将与输入有关的各项放在等号右边,与输出有关的各项放在 等号左边,并按将幂排序。
过程数学模型的建立
例题1
试列写图所示RC无源网络的动态数学模型。设 ui 为输入变量,uo为输出变量。
R
Ui 解
C
uo
⑴ 确定过程的输入变量和输出变量: 依题意,ui 为输入变量,uo为输出变量。 ⑵ 建立原始微分方程: 根据电路理论中得可希霍夫定律,可有:
⑵ 时间常数T对系统的影响
控制通道
在相同的控制作用下,时间常数大,被控变量的变化比较缓
慢,此时过程比较平稳,容易进行控制,但过渡过程时间较 长;若时间常数小,则被控变量的变化速度快,控制过程比
较灵敏,不易控制。时间常数太大或太小,对控制上都不利。
扰动通道 控制通道,对于扰动通道,时间常数大,扰动作用比较平缓, 被控变量的变化比较平稳,过程较易控制。
热电偶的动态数学模型也是一个一阶常系数线性微分方程。
过程数学模型的建立
实验测试法
在需要建立数学模型的被控过程上,人为的施加一个扰动作用,然
后用仪表测量并纪录被控变量随时间变化的曲线,这条曲线既是被 控过程的特性曲线。将曲线进行分析、处理,就可得到描述过程特
性的数学表达式。
常用的测试方法:1.阶跃信号法 2.矩形脉冲法
⑵ 建立原始微分方程 根据能量守恒定律: 热电偶的原始微分方程式为
第二章 过程装备控制基础

• 四种基本调节规律:位式、比例、积分、 微分。其中位式是断续调节,另三种均是 连续调节规律。
• (1)位式调节规律
• 双位调节是位式高节规律中最简单的形式 。
• (2)比例调节规律(P) • 比例放大系数 在比例调节中,调节器的输出信号
• 传递滞后总是存在的,克服减小信号传递 滞后的方法有:尽量缩短气压信号管线的 长度,一般不超过300M;改用电信号传递 ,即先用气电转换器把调节器输出 的气压
信号变成电信号,送到现场后,再用电气 转换成气压信号送到执行器上;在气压管 线上加气动继动器,或在执行器上加气动 阀门定位器,以增大输出功率,减少传递 滞后的影响等;
• 比例度对系统稳定性的影响:比例度的减小,系 统的稳定程度降低,其过渡过程逐渐从衰减振荡 走向临界振荡直至发散振荡。
• 比例调节是最基本、最主要、应用最普遍 的规律,它能较为迅速地克服干扰的影响 ,使系统很快平稳下来。比例控制作用通 常适用于干扰少、振动幅度小、负荷变化 不大,滞后较小或者控制精度要求不高的 场合。
报警系统。
H qv2 Rs
(2)双容液位对象
• 双容水槽是两个串联在一起的水槽,它们 之间的连接管具有阻力,因此两者液位不 同,
• 水槽1的动态平衡关系:
qv 1
qv 2
A1d1 h dt•源自•水槽2动态平衡关系
qv2qv3
A2dh2
dt
qv1qv3 A1dh1 A2dh2
dt
dt
• 列写物料守恒方程:
• 被控变量选择的基本原则:
• 信号最好是能够直接测量获得,
过程控制 习题与答案
第1章绪论思考题与习题1-1 过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制?解答:1.控制对象复杂、控制要求多样2. 控制方案丰富3.控制多属慢过程参数控制4.定值控制是过程控制的一种主要控制形式5.过程控制系统由规范化的过程检测控制仪表组成1-2 什么是过程控制系统?典型过程控制系统由哪几部分组成?解答:过程控制系统:一般是指工业生产过程中自动控制系统的变量是温度、压力、流量、液位、成份等这样一些变量的系统。
组成:控制器,被控对象,执行机构,检测变送装置。
1-3简述被控对象、被控变量、操纵变量、扰动(干扰)量、设定(给定)值和偏差的含义?解答:被控对象自动控制系统中,工艺参数需要控制的生产过程、设备或机器等。
被控变量被控对象内要求保持设定数值的工艺参数。
操纵变量受控制器操纵的,用以克服扰动的影响,使被控变量保持设定值的物料量或能量。
扰动量除操纵变量外,作用于被控对象并引起被控变量变化的因素。
设定值被控变量的预定值。
偏差被控变量的设定值与实际值之差。
1-4按照设定值的不同形式, 过程控制系统可分为哪几类?解答:按照设定值的不同形式又可分为:1.定值控制系统定值控制系统是指设定值恒定不变的控制系统.定值控制系统的作用是克服扰动对被控变量的影响,使被控变量最终回到设定值或其附近.以后无特殊说明控制系统均指定值控制系统而言.2.随动控制系统随动控制系统的设定值是不断变化的.随动控制系统的作用是使被控变量能够尽快地,准确无误地跟踪设定值的变化而变化3.程序控制系统程序控制系统的设定值也是变化的,但它是一个已知的时间函数,即设定值按一定的时间程序变化。
1-5 什么是定值控制系统?解答:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。
1-6 什么是被控对象的静态特性?什么是被控对象的动态特性?为什么说研究控制系统的动态比其静态更有意义?解答:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性。
过程控制第二章(过程建模与过程特性)解析
传递函数:
H 2 ( s) K K Qi ( s) T1T2 s 2 (T1 T2 )s 1 (T1s 1)(T2 s 1)
二阶线性对象(总结)
典型的微分方程
d 2 h2 dh2 T1T2 ( T T ) h2 K qi 1 2 2 dt dt (T1 A1 R1 T2 A2 R2 K R2 )
(5)工业过程的故障检测与诊断;
(6)设备启动与停车的操作方案;信号作用下的四种典型类型: 1. 自衡的非振荡过程 2. 无自衡的非振荡过程 3. 有自衡的振荡过程 4. 具有反向特性的过程
单容过程
1.自衡的非振荡过程
Q1 Q1
t h
h
Q2 t
u(t ) u1 (t ) u1 (t t )
其中
u 2 (t ) u1 (t t )
假定对象无明显非线性,则矩形脉冲 响应就是两个阶跃响应之和,即
y(t ) y1 (t ) y1 (t t )
典型的阶跃响应函数
h2 (t ) Ka[1
T1 e T2 T1
t T1
T2 e T2 T1
t T2
]
典型的阶跃响应曲线
qi
a
t
h2 (t )
不相关 双容
二阶线性对象(总结)
典型的微分方程
d 2 h2 dh2 T1T2 ( T T ) h2 K qi 1 2 2 dt dt (T1 A1 R1 T2 A2 R2 K R2 )
f u y K 其它参数 不变
广义对象 控制通道放大系数
y Ko u
干扰通道放大系数
Kf
先进过程控制第二章资料
现假设某一对象的矩形脉冲响应曲线如下图所示.
由于上节介绍的求取对象数学模型的各种
y(t)
方法均基于对象的阶跃响应曲线, 因此需
将左图的矩形脉冲响应曲线转换成阶跃响
0
t 应曲线, 下面介绍转换原理.
矩形脉冲信号 x(t)可有下图所示的两个信号迭加而成.
x(t)
x1 (t )
x2 (t)
x x
x
0 t0
y (t )
等容惯性对象, 其传递函数为:
y()
0
和 n.
K W (s) (Ts 1)n
问题是如何由左图曲线求得
t 传递函数中的三个参数 K ,T
传递系数和以前一样求法, 即:
K y() y(0)/ x
其它两个参数的求法讨论如下.
y (t )
y()
在阶跃响应曲线上选择 0.8 y()
两个点, 与二阶系统相 同, 如下屏图中所示:
被控对象是指生产设备中进行的那些与温度﹑压力﹑ 流量﹑液位﹑物料成分与配比等相关的工艺过程, 所谓对 象特性就是这些过程的变化规律.
• 过程对象特性的数学描述就称为过程的数学模 型。
过程特性可从稳态和动态两方面来考察: • 稳态指过程在输入和输出变量达到平稳状态下
的行为。 • 动态是指输出变量和状态变量在输入影响下的
0.4 y()
0
t1
t2
t
当t1/t2>0.46时, 表明对象是高于二阶的. 对于高阶等容 惯性对象, n和T可用下面近似公式计算:
n (1.075t1 / t2 0.5)2 (7) 1 (t1 / t2 )
T (t1 t2 ) / 2.16n
(8)
采用式(7)时, 若求得n为非整数, 则取最接近的整数值.
第2章 过程装备控制基础-2.1
• 其动态物料平衡关系有: 其动态物料平衡关系有:
dV dH Q1 − Q 2 = =A × dt dt
• 在静态时, dV/dt=0, Q1=Q2; 在静态时, ; • 发生变化时, 当Q1发生变化时,液位 将随之 发生变化时 液位H将随之 变化, 变化,水槽出口处的静压力随之 发生变化,流出量 亦发生变化 亦发生变化。 发生变化,流出量Q2亦发生变化。 假设其变化量很小, 假设其变化量很小,可近似认为 Q2与液位 成正比,而与出水阀 与液位H成正比 与液位 成正比, 的水阻R2成反比, 的水阻 成反比,即 成反比
1
dV 为贮存量的变化率 dt
Q1
Q2 2
H Q2 = R2
在讨论被控对象的特性时,被控对象的出水阀开度不变, 在讨论被控对象的特性时,被控对象的出水阀开度不变, 因此阻力R2为常数。所以有: 因此阻力 为常数。所以有: 为常数
dH A × R2 × + H = R2 × Q1 dt
令T = AR2=R 2 C, K = R2 , 则
• 输入变量是控制系统的操纵变量和干扰信号, 输入变量是控制系统的操纵变量和干扰信号, 是控制系统的操纵变量和干扰信号 输出变量是控制系统的被控变量(控制要求)。 输出变量是控制系统的被控变量(控制要求)。 是控制系统的被控变量 • 被控对象输入变量与输出变量之间的联系称为通道。 被控对象输入变量与输出变量之间的联系称为通道。 通道
H
突然有一阶跃变化量△ , 突然有一阶跃变化量△Q1,则相 应液位变化量
∆H = K × ∆Q1 1 − e
(
−( t −t 0 ) T
)