动态范围与信噪比区别
音频信噪比
音频信噪比音频信噪比是指音响设备播放时,正常声音信号强度与噪声信号强度的比值。
当信噪比低,小信号输入时噪音严重,在整个音域的声音明显变得浑浊不清,不知发的是什么音,严重影响音质。
信噪比的大小是用有用信号功率(或电压)和噪声功率(或电压)比值的对数来表示的。
这样计算出来的单位称为“贝尔”。
实用中因为贝尔这个单位太大,所以用它的十分之一做计算单位,称为“分贝”。
对于便携式DVD来说,信噪比至少应该在70dB(分贝)以上,才可以考虑。
信噪比,即SNR(Signal to Noise Ratio),又称为讯噪比。
狭义来讲是指放大器的输出信号的电压与同时输出的噪声电压的比,常常用分贝数表示,设备的信噪比越高表明它产生的杂音越少。
一般来说,信噪比越大,说明混在信号里的噪声越小,声音回放的音质量越高,否则相反。
信噪比一般不应该低于70dB,高保真音箱的信噪比应达到110dB以上。
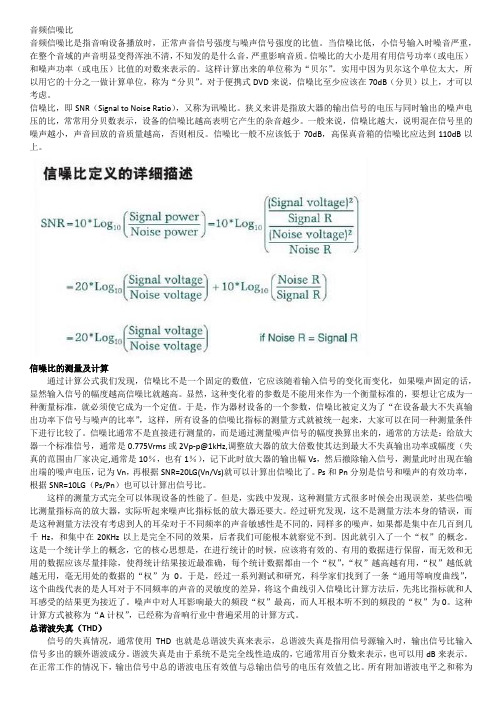
信噪比的测量及计算通过计算公式我们发现,信噪比不是一个固定的数值,它应该随着输入信号的变化而变化,如果噪声固定的话,显然输入信号的幅度越高信噪比就越高。
显然,这种变化着的参数是不能用来作为一个衡量标准的,要想让它成为一种衡量标准,就必须使它成为一个定值。
于是,作为器材设备的一个参数,信噪比被定义为了“在设备最大不失真输出功率下信号与噪声的比率”,这样,所有设备的信噪比指标的测量方式就被统一起来,大家可以在同一种测量条件下进行比较了。
信噪比通常不是直接进行测量的,而是通过测量噪声信号的幅度换算出来的,通常的方法是:给放大器一个标准信号,通常是0.775Vrms或2Vp-p@1kHz,调整放大器的放大倍数使其达到最大不失真输出功率或幅度(失真的范围由厂家决定,通常是10%,也有1%),记下此时放大器的输出幅Vs,然后撤除输入信号,测量此时出现在输出端的噪声电压,记为Vn,再根据SNR=20LG(Vn/Vs)就可以计算出信噪比了。
Ps和Pn分别是信号和噪声的有效功率,根据SNR=10LG(Ps/Pn)也可以计算出信号比。
音频采样深度与动态范围关系

音频采样深度与动态范围关系随着科技的不断进步,音频行业也逐渐发展壮大。
在音频领域中,采样深度和动态范围是两个重要的概念。
本文将介绍音频采样深度和动态范围的概念,并探讨它们之间的关系。
一、音频采样深度的定义和作用音频采样深度指的是每个采样点的位数,也称为量化位数。
常见的音频采样深度有16位、24位和32位。
采样深度越高,表示可以表达的音频信号细节越多,音质表现能力越强。
音频采样深度的作用在于决定每个采样点的取值范围。
例如,16位采样深度的取值范围是-32768到32767,而24位采样深度的取值范围是-8388608到8388607。
采样深度越高,取值范围就越大,从而可以更准确地表示音频信号的细节。
二、动态范围的定义和影响因素动态范围指的是在音频信号中能够表达的最小和最大幅度之间的差异。
它是衡量音频信号丰富程度和细节表现能力的指标。
动态范围越大,表示音频信号的细节表现能力越强。
动态范围的大小受到多个因素的影响。
其中最重要的是音频采样深度和信噪比。
较高的采样深度可以提供更多的细节,有利于音频信号的动态范围扩展。
较高的信噪比可以有效降低噪音的干扰,提高动态范围。
三、音频采样深度与动态范围的关系音频采样深度和动态范围之间存在密切的关系。
采样深度决定了每个采样点的取值范围,而动态范围反映了音频信号的幅度变化范围。
采样深度越高,表示每个采样点可以表示的细节越多,因此音频信号的动态范围也会相应增加。
例如,对于同一个音频信号,在16位采样深度下,其动态范围可能只有90dB左右,而在24位采样深度下,动态范围可能增加到120dB以上。
这是因为24位采样深度可以更准确地表示音频信号的细节,从而提高了动态范围。
需要注意的是,采样深度的增加并不能无限地提高动态范围。
一方面,实际中的音频通常并不会涵盖如此宽广的动态范围,因此较高的采样深度可能会导致浪费。
另一方面,随着采样深度的增加,音频文件的大小也会增加,对存储和传输带来一定的挑战。
常用的音频术语的含义
音频CODEC中常用的音频术语的含义对于一个音频ADC、DAC或CODEC,常用一些特定的音频术语来标称该器件的质量。
常用的一些音频术语包括分辨率、采样时钟频率(左右声道时钟频率)、THD、THD+N、动态范围、信噪比、幅度-频率响应等1. 音频频带音频频带通常指20Hz到20kHz这一频段。
2. 分辨率分辨率是指转换中能够分辨的最小量。
习惯上用转换结果的位数来表示。
比如我们所有的CODEC、ADC、DAC都是24bi t分辨率3. 采样时钟频率(左右声道时钟频率,LRCK)采样时钟频率是指转换器对信号的采样次数。
常用的采样时钟频率有48kHz、44.1kHz等。
根据采样原理,实际上,COD EC或ADC、DAC可处理的信号带宽最高只有LRCK / 2。
假设采样时钟频率为44.1kHz,那么,能够处理的最高信号带宽为22.05kHz。
假设采样时钟频率为32kHz,那么,能够处理的最高信号带宽为16kHz。
音频CODEC中常用的音频术语的含义4. 加权(噪声计权)滤波器在有关音频的噪声测量过程中,会使用到加权滤波器。
加权滤波器是用来模拟人耳的频率响应,使得测量的结果更贴近人耳的实际听觉。
常用的滤波器在中心频率所处的音频范围内,其幅频响应是平坦的。
但加权滤波器的幅频响应是没有平坦的部分的。
这是因为人耳的频率响应是不平坦的,对于低频或高频段,人耳的分辨力是很弱的。
因此,为了使测量的结果更贴近实际,一般在噪声测量中会使用加权滤波器。
常用的加权滤波器为A加权滤波器。
音频CODEC中常用的音频术语的含义音频CODEC中常用的音频术语的含义5. 谐波失真THD如果一个音频ADC、DAC或CODEC,它具备绝对线性的传输函数,那么,当使用一个单音正弦波信号激励这个器件时,它的输出端应该产生与输入激励信号完全一样的正弦信号。
我们在这里称之为无失真的设备。
如果音频ADC、DAC或CODEC的传输函数是非线性的,那么,当使用一个单音正弦波信号激励这个器件时,这种非线性的传输函数会导致输出中既包含基频部分(单音正弦激励信号),也包括基频的谐波成份。
资深视觉工程师整理工业相机39问(上)点赞收藏!

资深视觉工程师整理工业相机39问(上)点赞收藏!1:工业相机的丢帧的问题是由什么原因引起的?工业相机的丢帧现象和相机采用的接口没有关系,不管什么接口,驱动程序设计的不良和工业相机硬件才是丢帧的真正原因。
丢帧的原因其实就是资料通道堵塞,新的图像进来是,没有办法及时处理,前一张可能被迫丢弃,或者新的图像丢失。
要想解决丢帧问题,必须针对驱动程序和工业相机硬件资料传输中间的每一个环节进行精密设计。
2:工业相机输出、输入接口有哪些?工业相机的输入、输出接口有USB3.0,IEEE 1394,Camera Link、USB2.0、Ethernet、几种;3:知道被测物的长、宽、高以及要求的测量精度,如何来选择CCD 相机和工业镜头,选择以上器件需要注意什么?首先要选择合适的镜头。
选择镜头应该遵循以下原则:1)镜头的芯片靶面大于或者等于工业相机芯片;2)选择匹配相机接口的镜头,是C接口还是F接口,或着M42接口等;3)注意选择镜头的最小工作距离,镜头畸变,结构尺寸及光谱特性;选择CCD 相机时,应该综合考虑以下几个方面:1).注意感光芯片类型;通常CCD 或者CMOS,CCD的成像质量优于CMOS,成本也高于CMOS,同样分辨率的传感器,优先选择尺寸大的,有利于成像质量的提高;2).视频特点;包括点频、行频。
3).相机输出接口,不同的输出接口对用不同的带宽,根据传输的距离,稳定性,传输数据的大小(带宽)等合适的选择USB,1394,Camerlink或者百兆/千兆网接口的相机;4).相机的工作模式:连续,触发,控制,异步复位,长时间积分。
5).视频参数调整及控制方法:Manual、RS232.同时,选择CCD 的时候应该注意,l inch = 16mm 而不是等于25.4mm.4:CCD 相机与CMOS 相机的区别在哪里?主要区别:CMOS(互补金属氧化物半导体)1.采用CMOS芯片,价格相对CCD相机较低2.CMOS芯片曝光方式一般为卷帘式快门曝光,适合拍摄静止物,体拍摄运动物体有拖影,且图像会变形3.色彩还原性较差4.芯片动态范围较小,灵敏度较差但在光照充足的情况下,也能取得较好的图像效果5.系统噪声:中到高:CCD(电荷耦合器件)1.采用CCD芯片,价格较高D芯片曝光方式一般为帧(全局快门)曝光,适合拍摄静止或运动物体3.色彩还原性好4.芯片动态范围较大,灵敏度好,成像效果对外界打光的依赖比CMOS芯片低5.系统噪声:低5:工业相机都有哪些主要参数?1.分辨率( Resolution );相机每次采集图像的像素点数(Pixels),对于工业数字相机一般是直接与光电传感器的像元数对应的,对于工业数字模拟相机则是取决于视频制式,PAL制为768*576,NTSC制为640*480。
信噪比的计算公式

信噪比的计算公式信噪比(Signal-to-Noise Ratio, SNR)是衡量信号质量的一个重要指标,它表示信号与噪声的比值。
信号越强、噪声越小,信噪比就越高,反之亦然。
在无线通信、音频处理、图像处理等领域都有广泛的应用。
信噪比的计算公式可以表示为 SNR = P_signal / P_noise ,其中P_signal 是信号的功率,P_noise 是噪声的功率。
信号的功率可以通过信号的幅度平方来计算,通常表示为P_signal = |S(S)|^2 ,其中S(S) 表示信号的复数时域函数。
噪声的功率可以通过噪声的均方根幅度来计算,通常表示为P_noise = S^2 ,其中S是噪声的均方根幅度。
在实际应用中,计算信噪比时需要先获取信号的功率和噪声的功率。
下面是一些常见的计算信噪比的方法。
1. 直接测量法:通过实际测量信号的功率和噪声的功率来计算信噪比。
在无线通信中,可以使用功率计来测量信号和噪声的功率。
在音频处理中,可以使用音频分析仪来测量信号和噪声的功率。
2. 载噪比法:在某些应用中,可以通过测量信号和噪声的幅度来计算信噪比。
例如,在调制解调器中可以使用载噪比(CNR)来表示信号与噪声的比值,计算公式为 CNR = 20log10(|SSSSSS / S|),其中SSSSSS表示信号的幅度,S表示噪声的幅度。
3. 信号能量法:在某些情况下,可以通过信号和噪声的能量来计算信噪比。
信号的能量可以通过信号的幅度平方的积分来计算,噪声的能量可以通过噪声的幅度平方的积分来计算。
然后将信号的能量除以噪声的能量即可得到信噪比。
4. 图像质量评价方法:在图像处理中,可以使用图像质量评价方法来计算信噪比。
例如,可以使用峰值信噪比(PSNR)来表示信号与噪声的比值,计算公式为 PSNR = 10 log10(255^2 / MSE),其中255^2是图像的动态范围,MSE是均方误差。
需要注意的是,不同应用领域对于信噪比的计算方法可能会略有不同,上述提到的方法仅为一般的参考内容。
msb解码参数
msb解码参数
MSB解码器是一种高质量的数字音频解码器,被广泛应用于高端音频设备中。
其主要特点是高精度、低噪声和低失真,能够还原音频信号的细节和动态范围,提供清晰、纯净的音质表现。
MSB解码器的参数包括多个方面,其中最重要的是解码精度和动态范围。
解码精度指的是解码器能够处理的数字音频信号的位数,一般来说,位数越高,解码精度就越高,音质表现也就越好。
而动态范围则是指解码器能够处理的音频信号的动态范围,也就是最大信号和最小信号之间的比值。
动态范围越大,解码器就能够更好地还原音频信号的细节和动态变化。
除了解码精度和动态范围之外,MSB解码器的参数还包括采样率、信噪比、失真度等。
采样率指的是数字音频信号的采样频率,一般来说,采样率越高,音质表现也就越好。
信噪比则是指解码器输出信号与噪声信号之间的比值,信噪比越高,噪声干扰就越小,音质表现也就越清晰。
而失真度则是指解码器输出信号与原始信号之间的差异程度,失真度越小,音质表现也就越真实。
总之,MSB解码器的参数是多方面的,这些参数共同决定了解码器的性能和音质表现。
在选择MSB解码器时,需要根据实际需求和使用环境来综合考虑这些参数,以选择最适合自己的解码器。
同时,在使用MSB解码器时,也需要注意正确的连接和配置,以保证最佳的音质表现效果。
音频质量评价指标

⾳频质量评价指标信噪⽐,SNR或S/N,⼜称为讯噪⽐。
是指⼀个电⼦设备或者电⼦系统中信号与噪声的⽐例。
这⾥⾯的信号指的是来⾃设备外部需要通过这台设备进⾏处理的电⼦信号,噪声是指经过该设备后产⽣的原信号中并不存在的⽆规则的额外信号(或信息),并且该种信号并不随原信号的变化⽽变化。
同样是“原信号不存在”还有⼀种东西叫“失真”,失真和噪声实际上有⼀定关系,⼆者的不同是失真是有规律的,⽽噪声则是⽆规律的。
【计算】信噪⽐的计量单位是dB,其计算⽅法是10lg(PS/PN),其中Ps和Pn分别代表信号和噪声的有效功率,也可以换算成电压幅值的⽐率关系:20Lg(VS/VN),Vs和Vn分别代表信号和噪声电压的“有效值”。
在⾳频放⼤器中,希望的是该放⼤器除了放⼤信号外,不应该添加任何其它额外的东西。
因此,信噪⽐应该越⾼越好。
【狭义】指放⼤器的输出信号的功率与同时输出的噪声功率的⽐,常常⽤分贝数表⽰,设备的信噪⽐越⾼表明它产⽣的噪声越少。
⼀般来说,信噪⽐越⼤,说明混在信号⾥的噪声越⼩,声⾳回放的⾳质量越⾼,否则相反。
信噪⽐⼀般不应该低于70dB,⾼保真⾳箱的信噪⽐应达到110dB以上。
【载噪⽐】载噪⽐中的已调信号的功率包括了传输信号的功率和调制载波的功率,⽽信噪⽐中仅包括传输信号的功率。
因此对同⼀个传输系统⽽⾔,载噪⽐要⽐信噪⽐⼤,两者之间相差⼀个载波功率。
当然载波功率与传输信号功率相⽐通常都是很⼩的,因⽽载噪⽐与信噪⽐在数值上⼗分接近。
在调制传输系统中,⼀般采⽤载噪⽐指标;⽽在基带传输系统中,⼀般采⽤信噪⽐指标。
【db,dbm,dbw关系】db是纯数值,作⽐较⽤的,如果是电压之类的,换算时就⽤20log,⽽功率则⽤10log,DB在缺省情况下总是定义功率单位,以 10log 为计。
dbW和dbm是功率绝对值,0dBw = 10log1W = 10log1000mw = 30dBm;但是,⽤⼀个dBm减另外⼀个dBm时,得到的结果是dB。
单反相机的宽容度和动态范围的区别在哪里?

单反相机的宽容度和动态范围的区别在哪里?动态范围是信号处理上的概念,表示可变化信号中最大值和最小值的比值,通常用对数表示。
摄影中这个概念有几个层次,首先是场景光的动态范围,晴朗的白天光照强度可以超过10000lux,而满月月光的照度是lux,如果一个场景中同时出现两者,那么亮区和暗区的光比就是动态范围。
其次是传感器本身的物理动态范围,通常是传感器的最大和最小测量值的比值,最大测量值受制于传感器的物理设计,而最小测量值受制于噪声水平。
最后一个动态范围是记录到照片文件中的动态范围,取决于图像文件的信噪比,同读出电路噪声,数据压缩损失都有关系。
这三个动态范围是相互联系的,通常来说场景光的动态范围非常大,复杂场景的光比经常超过传感器的动态范围,所以实际照片记录下来的动态范围主要取决于传感器性能。
而在传感器记录信号的基础上,后续的信号读出电路,机内图像修正,文件压缩损失等等都会进一步造成动态范围的损失(典型的比如将照片存为RAW和JPG的不同),所以一般情况下照片动态范围都会小于传感器的性能上限。
在拍照中,如果场景光的动态范围超过了最终照片的动态范围,那么超过的部分就不会记录下来造成信息的损失。
例如过亮的部分在照片中一片白,过暗的部分一片黑,而由于信息没有记录,后期处理也完全无法恢复这些这些部分的细节。
所以为了得到一张高光和阴影部分都有丰富细节的照片,相机的动态范围越高越好。
胶片的动态范围5~10个Ev,而现在最好的数字传感器可以做到接近14个Ev,所以很多原先需要多张包围曝光,拼接,摇黑卡,渐变滤镜等等的拍照场景,都可以用顶级数码相机一次拍照记录完整信息,再后期处理出同样的照片了。
最后是宽容度,它和动态范围有区别也有联系。
假设一台相机的动态范围是13Ev,要求高画质且RAW拍照时可用中间的6Ev。
那么如果被摄物的正确曝光在0Ev,实际曝光参数在-3Ev到+3Ev之间都可以通过后期处理得到满意的画质,这时候就将宽容度称作-3Ev到+3Ev(注意上下限之差是6Ev,也可以说相机宽容度范围是6ev,或是高光宽容度+3Ev/暗光宽容度-3Ev)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信噪比,定义当然很明白了,对于设备来说它的给出一定要靠实际测试得到。
就是正常输出信号(测试时具体给定)与同时产生的噪声的比较,=20log10(Uout/Unoise)
信噪比S/N指信号中原有部分和由于设备自身、环境干扰等原因造成的噪声的比例。
信号和噪声分别用电平表示,单位是Vrms或mVrms。
信噪比的单位是dB,计算公式是SN=20LOG(Vs/Vn)(不计权),其中Vs是信号电平,Vn是噪声电平。
采用对数计算是由于人耳的响度特性具有对数特征。
信噪比越大,说明系统的噪声和信号的差距越大,系统的特性就越好。
动态范围,是可以计算的。
就是设备的最大可测试(输出)值与最小可测试(输出)值的比较取自然对数。
所以单位都是dB.当然看得出两者区别还是很明显的。
与人眼相比,对于标准CCD和CMOS图像传感器来说,所有感光单元的曝光(收集光子)时间都是相同的。
感光单元对景物明亮部分收集的光子较多,对阴暗部分收集的光子则较少。
但是,感光单元能够收集的光子数量却受到阱容量(well capacity)的限制,所以捕捉物体较亮色调的感光单元有可能会溢出或饱和。
为防止出现这种情况,可以减少曝光时间。
但如果这样做,捕捉物体较暗色调的感光单元可能又无法收集到足够多的光子。
因此,对于典型的单次曝光的图像传感器,其动态范围的上限受制于感光单元的阱容量,下限则受制于感光单元的信噪比。
因此,CCD摄像器件的动态范围是指其输出的饱和电压与暗场下噪声峰-峰电压之比,即:
动态范围=Usat/UNp-p (1)
式中,Usat为输出饱和电压;UNP-P为噪声的峰-峰值。
显然,动态范围也可这样来定义和计算,即由CCD势阱中可存贮的最大电荷量和噪声所决定的电荷量之比;其数值也是输出端的信号峰值电压与均方根噪声电压之比(通常用dB 表示),即:
动态范围=USp-p/UNp-p (2)
式中,USp-p为输出信号峰值电压
动态范围= 全井容量/ 噪声 (Dynamic range = Full well capacity / read noise)
位元深度(bit depth)是一个所需的数值可以来表示整个动态范围。
比如动态范围是2300,那么需要12位的数值来表示,2^12-1 = 4095,而2^10-1=1023 < 2300 这里的12位就是一般说的科研相机的参数,10bit,12bit,14bit,16bit。