Nice reachability for planar bilinear control systems with applications to planar linear sw
基于LMI的离散广义系统的容许性和鲁棒镇定性

Vol. 42 ,No. 4Apr. 202 1第42卷第4期2021年4月东北大学学报(自然科学版)Journal of Northeastern University (Natural Science )doi : 10. 12068/j.issn. 1005 -3026.2021.04.002基于LMI 的离散广义系统的容许性和鲁棒镇定性张雪峰,靳凯净(东北大学理学院,辽宁沈阳110819)摘 要:本文主要研究了离散广义系统的容许性问题.利用离散广义系统的受限等价变换,提岀了一个新的使离散广义系统容许的充分必要条件.通过引入一个中间矩阵,以配置系统矩阵的部分极点的方式来保 证闭环系统的正则性,并设计了一个状态反馈控制器使得闭环系统容许.利用类似方法,对不确定离散广义系 统的控制器设计问题进行了相应的讨论,得到了不确定离散广义系统鲁棒镇定的充分条件.本文提岀的所有方法是严格的线性矩阵不等式(LMI).两个数值例子验证了本文方法的有效性.关 键词:广义系统;离散系统;容许性;鲁棒镇定性;线性矩阵不等式中图分类号:TP 273 文献标志码:A 文章编号:1005 -3026(2021)04 -0463 -07Admissibility and Robust Stabilization of Discrete SingularSystems Based on LMIZHANG Xue-feng , JIN Kai-jing(School of Sciences , Northeastern University , Shenyang 110819, China. Corresponding author : ZHANG Xue- feng, E-mail : zhangxuefeng@ mail. neu. edu. cn)Abstract : The admissibility issue of discrete singular systems was mainly studied. Applyingrestricted equivalent transformations of the discrete singular system , a new necessary and sufficient condition was proposed to ensure discrete singular system admissible. By introducing an intermediate matrix to configure partial poles of system matrix such that the closed-loop system is regular , a state feedback controller was designed to make the closed-loop system admissible. Using similar methods , the controller design problem of uncertain discrete singular systems was discussed as well , a sufficient condition of robust stabilization for uncertain discrete singular systems was obtained. All the methods proposed in this article are strictly linear matrix inequalities (LMI ). Two numerical examples verify the effectiveness of the proposed methods.Key words : singular systems ; discrete systems ; admissibility ; robust stabilization ; linear matrix inequality ( LMI )由于广义系统由微分方程和代数方程的混合形式表示,所以与正常系统相比,广义系统更一般,能更加直接地描述物理系统.在某种意义 上,正常系统是广义系统的一个特例,因此,在过去的几十年里,广义系统已成为一个深受广大学者欢迎的研究领域[|-4].广义系统的应用覆盖经济、机器人技术和电路网络系统等许多领域. 容许性分析是所有广义系统最基本的研究问题,近几十年来,研究人员已经对广义系统的极点配置⑸、控制[6-7]、保成本控制[8]、Takagi -Sugeno 模糊广义系统的容许性分析[9-10]及广义分数阶系统的反馈控制等[11]进行了大量研究.随着计算机和数字信号的快速发展,学者们 已意识到研究离散系统的重要性和必要性[12-14],广义系统和离散系统在控制领域和工程领域发挥着重要作用,科研人员对离散广义系统的鲁棒镇定[15-17]、控制[18-19]及观测器设计[20]等问题进行了广泛研究.在利用上述这些结果进行状态 反馈或输出反馈控制器设计时,它们是双线性矩阵不等式(BMI ),并非严格的线性矩阵不等式(LMI ).而BMI 的求解是一个NP 难题(非确定性多项式难题),目前比较特殊的情形可以采用收稿日期:2020 -07 -24作者简介:张雪峰(1966 -),男,辽宁抚顺人,东北大学副教授.464东北大学学报(自然科学版)第42卷迭代算法求解,没有通用的有效求解方法,所以利用现有的BMI判据在实际应用中来研究系统的镇定性问题大多数很难求得可行解.基于上述文献,本文提出了离散广义系统容许的充分必要条件,这一结果是严格的LMI,避免了原有结果求解等式约束的困难.基于本文提出的容许性判定定理,通过约束矩阵P的形式,给出了状态反馈控制器的设计方法,保证了闭环系统的容许性,避免了利用原有方法而导致的BMI问题.同时,本文也研究了不确定离散广义系统的容许性,得出的所有结果都是严格的LMI判据,可以通过Matlab LMI工具箱进行验证.本文提出的判据排除了奇异矩阵E的零空间,只考虑广义系统的受限等价变换.这一方法也适用于其他广义系统.1问题描述与预备知识符号说明:R"表示n维欧几里得空间,R"%”表示由n x m维的矩阵组成的集合,I表示一个具有适当维数的单位矩阵表示一个n维单位矩阵,X>0(<0)表示矩阵X是正定的(负定的),sym{Y}表示Y+Y T,a表示一个对称矩阵的转置部分.考虑具有如下形式的线性不确定离散广义系统:Ex(k+1)=A x(k)+Bu(k),(1)y(k)=Cx(k).(2)式中:x(k)e R”表示状态;u(k)e R n表示控制输入;y(k)e R。
FLUENT软件操作界面中英文对照
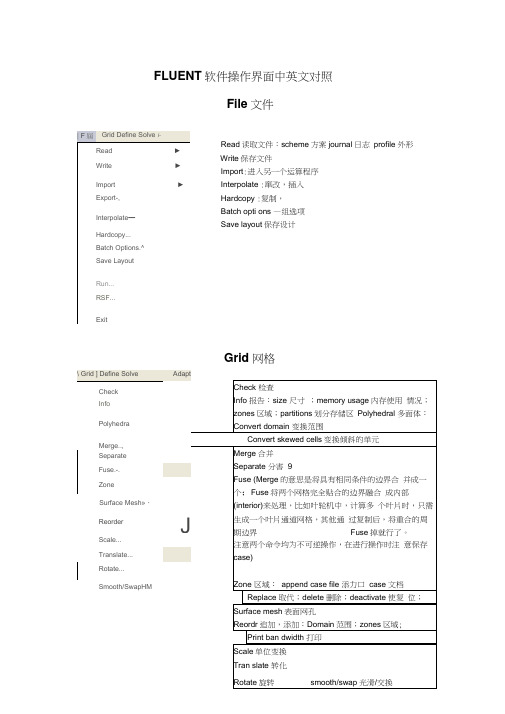
FLUENT 软件操作界面中英文对照File 文件Read 读取文件:scheme 方案journal 日志 profile 外形 Write 保存文件 Import :进入另一个运算程序 Interpolate :窜改,插入Hardcopy :复制,Batch opti ons —组选项Save layout 保存设计 Grid 网格| F 屆 Grid Define Solve i-Read► Write►Import ► Export-, Interpolate —Hardcopy...Batch Options.^Save LayoutRun...RSF...ExitDefine Models模型:solver解算器Pressure based 基于压力Den sity based基于密度末解用丁 pressure based,雀改用Censity based 岀观不苻合秦相36的摄不,请甸pres 羊WE base d Al density based 慎仆则迢.41刊卜 IS 况?北外.血OC ・EHU ^ cotipled >(/^ ptiaw ccupl ed simple 可这孔 & pimple ijEpiso 逞划.--■轟=Sortg 冲-丸布时制* ^jfe-5-6 1844DOden ba&ed 亘工F 吋.压聲血ptessurt ba$«i 适可于那可乐册斤"dens Ply based 把丸“河悴掏t :至殳嗟之一.刑牛可爪門d 的创R 监當歎1一,般如人锻暮叫人丄有用 轴怀,火薩墟迭牛才H5)-0 程:yje8D8-丸布门 1叫;20GS-3-7 10-2ODQ歆;I :谢PrflSsdrfl-Bawd Soker ^Fluflnt 它星英于压力快的束解孤便丹的圮压力修止畀法"求释旳控制片悝足标联式的,擅K 家鮮不町压縮舐Mb 对于町压砂也可旦索麟;Fk«nl 6-3 tl 前的I 板』冷孵臥 B fjS4^r«^at«d &Olvar fli Cfruptod Solvtr,的实也fltje Pr#4iurft-ea5<KJ ScFvAi 约两种虽幵方ib应理拈Fluent 氐J 眇坝犢型小的.它拈垒于曲喪红旳求聲塞,最辑的出H .也桿 艮先■那式的.丰誓■載密式冇Roz AU$hk>谏方法的初和&让Fhwrt 耳有比我甘的求IT 可压胃(说 劫謹力,們耳帕榕式淮冇琴加IF 科限闾辉,倒比还丰A 完荐匚Coupted 的算送t 对子慨站何Hh 地们足便用円匕口讷油皿购 加£未处為 性上世魅端计棒低逢刈趾.擁说的DansJty-Bjiwd Solver F ft St SiMPLEC, P 怡DE 些选以的.闪为進些ffliQl ;力修止鼻袪・不金在这种类崖的我押■中氏现泊I 建址祢匹足整用Fw»ur 护P.sed Solver 堺决昧的利底*implicit 隐式, explicit 显示Space 空间:2D , axisymmetric (转动轴), axisymmetric swirl (漩涡转动轴);Time 时间 :steady 定常,unsteady 非定常 Velocity formulatio n 制定速度: absolute 绝对的;relative 相对的Gradient option 梯度选择:以单元作基础;以节点作基础;以单元作梯度的最小正方形。
中国高速铁路列控系统的形式化分析与验证

中国科学:信息科学2014年第44卷第?期:1–? 中国高速铁路列控系统的形式化分析与验证郭丹青x,吕继东y,王淑灵x,唐涛y,詹乃军x∗,周达天y,邹亮xx中国科学院软件研究所计算机科学国家重点实验室,北京100190y北京交通大学,北京100044*詹乃军.E-mail:znj@收稿日期:2014–01–19;接受日期:2014–05–08国家重点基础研究发展计划(973计划)(批准号:2014CB340700),国家高技术研究发展计划(863计划)(批准号:2012AA112801)和国家自然科学基金(批准号:91118007,6110006,61304185)项目资助摘要高速铁路列控系统的安全与否直接涉及人民的生命财产安全,对高速铁路列控系统进行严格的形式化验证具有重要意义.但是随着高速铁路列控系统软件以及硬件规模的不断增大,系统的复杂性有了很大的提高,直接对高速铁路列控系统进行形式化验证已经变得越来越困难.另一方面,由于图形化建模和仿真表现方式直观,易于理解,在工程实践中已经得到了广泛的应用.因此,为了更好的保证铁路系统的安全,对系统进行仿真排除部分安全隐患显得尤为重要.本文通过使用Simulink/Stateflow建模工具对高速铁路列控系统的行车许可,等级升级及部分模式转换场景进行了建模.该模型具有普适性,通过修改参数信息,可以对不同的等级转换以及模式转换的组合情况进行仿真.通过使用该模型我们对10个组合情况进行了仿真,最后发现在某些情况下可能会出现不正常停车或者等级转换失败的现象.类似于测试,仿真仅仅能够发现错误,不能证明系统没有错误.因为仿真的这种不完备性,对仿真辅助形式验证在安全攸关系统设计中是非常必要的.为此,我们取其中一个不正常停车的场景进行了形式验证,验证结果证明了在任何情况下都会不正常停车.关键词中国高速铁路列控系统Simulink/Stateflow仿真模式转换等级转换形式化验证1引言高速铁路具有节能,环保,大运量,安全舒适等明显优势,是交通运输体系中最具可持续性和环境友好性的运输模式,客运高速化已成为世界潮流.我国高速铁路建设列为拉动内需的“火车头”,重点发展高速铁路,将建成以北京为中心,2小时大中城市圈为主节点,8小时快速铁路交通为主干的高速铁路客运网络.可以预见,以高速铁路为核心的快速铁路交通网的建成,将使我国经济社会发展步入高速铁路时代.高速铁路是庞大复杂的系统工程,集成了多学科,多领域的高新技术.其中中国高速铁路列控系统是保证列车高速,高效,安全运行的坚实基础,所以确保高速铁路列控系统的安全性有非常重要的意义.列车运行控制系统是高速铁路的核心技术之一,是一个深度融合了计算,通信和控制的系统,同时又是安全攸关的系统,即系统的任何错误都可能导致灾难性后果,是一种典型的信息物理融合系统(Cyber-Physical Systems,CPS).例如,2011年7月23日发生在温州事故导致40多位乘客失去生命.它郭丹青,吕继东,唐涛等:中国高速铁路列控系统的形式化分析与验证通过3C(Computation,Communication,Control)技术的有机融合与深度协作,实现列车运行过程与信息交互系统的实时感知,动态控制和信息服务.随着列车运行速度的不断提高(运行时速将超过500公里/小时),地面,轨道网络与列车之间,列车与列车之间的交互作用极其复杂,使得列车运行控制系统建模,性质刻画和性能抽取变得复杂,最终必然导致对系统安全性分析和验证的复杂程度急剧增加.列车运行安全控制标准是列车运行控制系统的技术标准,是实现列车安全运行的技术保障之一.因而必须确保制定的列车运行安全控制标准是安全可靠的,即首先保证内部不存在互相矛盾的地方;其次,要保证根据标准列车能够安全运行在给定路段上;再次,一旦发生事故,根据标准能够采取相应应对措施不至于发生灾难性后果.1.1本文主要贡献本文主要研究如何利用信息物理融合系统方面最新结果,特别是我们最近几年在混成系统建模,分析和验证方面的结果,提出一套中国高速铁路列控系统图形建模,仿真,形式建模和形式验证于一体的方法,从而提高中国高速铁路列控系统的可靠性.具体讲:Simulink/Stateflow[1,2]是Matlab中一个重要的商业组件,拥有Matlab的强大计算能力支持,在工业界使用广泛,拥有深厚的用户基础.它是一种图形化的建模工具,对模型的描述比较直观,并且支持仿真,可以检查模型是否与预计行为相符,以便排除部分早期的设计失误,已经成为一种事实上的工业标准.同时,它还可以将建立的模型转化为对应的C语言,有助降低开发成本.而过去,很少有使用Simulink/Stateflow对列控系统进行建模和仿真的工作.基于此,我们首先针对目前中国高速铁路列控系统的规范,提出一种一般性Simulink/Stateflow图形模型框架.对高速铁路列控系统的行车许可,等级升级及部分模式转换场景建立了Simlink/Stateflow模型,并且使用该模型对二级到三级与模式转换相结合的部分情况进行了仿真,发现在部分情况下会出现不正常停车以及等级转换失败的现象.另一方面,因为仿真仅仅能够根据环境的有穷输入在有限时间内观察系统行为是否满足要求,而环境的输入通常有无穷多种,并且这些系统的运行可能没有时间限制,所以类似于测试,仿真仅仅能够发现系统错误,不能够证明系统没有错误.特别对于安全攸关系统,仅仅仿真无法保证系统的正确性.因而对Simulink/Stateflow图形模型进行形式验证,作为仿真的一种补充,是非常必要的.形式验证Simulink/Stateflow图形模型的前提是需要提供一个形式语义以及针对该形式语义的验证技术.在[3,4]中,我们考虑如何将Simulink/Stateflow图形模型转换成HCSP[5,6]形式模型,并使用HHL[7]及其定理证明器[8]来形式验证转化后的形式模型.本文的另一贡献是:我们以其中某个场景为例,说明如何使用上述方法将其转换为形式模型并严格验证,验证结果表明在任何输入下均不能正常停车.1.2相关工作为了支持混成系统建模,人们提出很多建模语言,例如:Modelica[9],HybridUML[10],时间自动机[11],混成自动机[12],Esterel[13],等等.Modelica[9]与Simulink同是图形化的建模语言.它是一种开源语言,支持用户自定义修改.它同时支持图形建模和代码生成,表达能力很强.但是它没有类似于Stateflow这样的控制流图建模工具,所以对控制逻辑建模支持比较薄弱.虽然Modelica使用算法和函数对控制逻辑进行建模,但是由于这种建模方式是基于文本的,表现不够直观,不利于对高层模型进行建模.HybridUML[10]是一种对混成系统进行图形化建模的语言,它是基于传统UML的混成扩展. UML在工业界有广泛的使用,用户基础较好.但是HybridUML不能进行仿真,也不能进行验证,使用上有很大的限制.混成自动机[12]是自动机在混成系统方面的拓展,基于可达集计算的各种验证工作在学2中国科学:信息科学第44卷第?期术界研究深入,应用广泛.基于自动机的建模技术直观,易于理解,但是它没有系统结构方面的信息,组合性差,不适合大型系统的建模.特别是,没有图形化工具支持,不能进行仿真,形式验证技术也不适用于复杂大型系统.Esterel[13]是一种基于时间同步模型的建模语言.与常见的同步异步通讯方式不同,当Esterel中信号被发送之后,该时间点上其他并发进程都可以将该信号接收任意有限次.Esterel拥有成熟的商业工具Scade[14]对其进行支持,该工具生成的代码可适用于实际系统,减少了后期开发的工作量.总之,Simulink/Stateflow是更实用的混成系统建模,分析和仿真工具.国内外有许多关于高速铁路列控系统形式建模和验证的工作,例如:Platzer等在[15]利用一种基于微分不变量的微分动态逻辑等技术对欧洲高速铁路列控系统进行建模,分析和验证,从欧洲高速铁路列控系统的非形式描述中发现了许多不严格的地方,之后他们还进一步通过设计一个可以严格证明安全性质的形式模型,以改进欧洲高速铁路列控系统的设计.国内也有很多科研工作者尝试对中国高速铁路列控系统进行形式建模和验证,例如:在[16]中,作者结合UML在业界的广泛应用及SMV模型检验工具的优点,提出了一套列控系统规范的建模与验证方法.而在[17]中,作者使用Petri网对高速铁路列控系统信道模型和数据传输的时间特性进行建模和分析,为CTCS-3级列控系统规范中的相关参数设计提供了前提和基础.综上分析,目前还没有一套针对高速铁路列控系统的集图形建模,仿真,形式建模和验证于一体的方法.本文填补了这方面的空白.2背景知识在这一节中,我们将介绍高速铁路列控系统,Simulink/Stateflow和HCSP以及HHL的一些背景知识,因为我们关心等级转换和模式转换相结合的场景,所以我们使用第一小节和第二小节分别介绍高速铁路列控系统等级和列车在不同等级下的不同模式,第三小节介绍Simulink/Stateflow,第四小节介绍HCSP和HHL.2.1高速铁路列控系统等级概述中国列车控制系统CTCS(Chinese Train Control System),根据总体原则,从国情,路情实际出发,共划分为5级[18],其中我们关心如下两个等级:1.CTCS-2(C2)级基于轨道传输信息的列车运行控制系统,面向提速干线和高速新线,采用车,地一体化设计.适用于各种限速区段,地面可不设通过信号机,机车凭车载信号行车.地面子系统中增加列控中心,根据列车占用情况及进路状态,计算行车许可及静态列车速度曲线并传送给列车.点式信息设备用于向车载设备传输定位信息,进路参数,线路参数,限速和停车信息等.2.CTCS-3(C3)级基于无线传输信息,采用轨道电路等方式检查列车占用的列车运行控制系统.面向提速干线,高速新线或特殊线路,基于无线通信的固定闭塞或虚拟自动闭塞.CTCS-3在CTCS-2的基础上有了很多改进.主要体现在控制中心,和信息交互方式的改变上.3郭丹青,吕继东,唐涛等:中国高速铁路列控系统的形式化分析与验证2.2CTCS-2级和CTCS-3级下模式概述每个等级下列车都有不同的模式,其中我们只关心C2下的完全监控模式(Full Supervision mode, FS),目视行车模式(OnSight mode,OS),部分监控模式(Partial Supervision mode,PS)模式,以及C3下的FS,OS,引导模式(Calling on mode,CO),冒进模式(Trip mode,TR).1.CTCS-2下模式介绍完全监控模式(FS):在完全监控模式下,列控车载设备应能判断列车位置和停车位置,在保证列车速度满足线路固定限速,车辆构造速度,停车位置,临时限速等条件的前提下,生成目标距离连续速度控制模式曲线,并连续监控列车速度,与模式速度比较,自动输出紧急制动或常用制动命令,同时,应能通过DMI显示列车实际速度,允许速度,目标速度和目标距离等信息.目视行车模式(OS):车载设备显示停车信号或位置不确定时,在停车状态下司机按压专用按钮可使车载设备转入目视行车模式.在该模式下,列控车载设备生成NBP(normal brake profile)∗为20km/h的模式曲线.部分监控模式(PS):由于应答器信息接收异常导致线路数据缺失,或者由于其它原因列控车载设备无线路数据,以及侧线接车和在车站办理引导接车时,列控车载设备的工作模式都定义为部分监控模式.2.CTCS-3下模式介绍完全监控模式(FS):当车载设备具备列车控制所需的全部基本数据(包括列车数据,行车许可和线路数据等)时,车载设备生成目标距离连续速度控制模式曲线,并通过DMI显示列车运行速度,允许速度,目标速度和目标距离等信息,监控列车安全运行.目视行车模式(OS):车载设备显示停车信号或位置不确定时,在停车状态下司机按压专用按钮可使车载设备转入目视行车模式.目视行车模式下,车载设备按固定限制速度40km/h监控列车运行,列车每运行一定距离司机需确认一次.引导模式(CO):当开放引导信号进行接发车时,车载设备生成目标距离连续速度控制模式曲线,并通过DMI显示列车运行速度,允许速度,目标速度和目标距离等,车载设备按固定限制速度40km/h监控列车运行,司机负责在列车运行时检查轨道占用情况.冒进模式(TR):列车执行冒进防护时,车载设备进入冒进模式.这个模式下列车会紧急制动,直至完全停止.2.3Simulink/Stateflow基本概念2.3.1Simulink介绍Simulink[1]是MATLAB最重要的组件之一,它提供一个图形化的动态系统建模,仿真和综合分析的集成环境.在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统.Simulink是用于动态系统和嵌入式系统的多领域仿真和基于模型的设计工具,拥有丰富的可扩充预定义模块库.对各种实时系统,包括通讯,控制,信号处理,视频处理和图像处理系统,Simulink提供了交互式图形化环境和可定制模块库来对其进行设计,仿真,执行和测试.∗常用制动介入曲线4中国科学:信息科学第44卷第?期Simulink模型是由一系列的模块和连接这些模块的边组成的.每个模块可以是一个Simulink模块库中的基本模块,表达了输入输出之间的一个数学关系,也可以是由若干模块组成的子系统.连接边反应了两个被连接模块之间的关系.Simulink模型通常由三部分组成:输入信号源(Source),系统(System)以及接收模块(Sink).1.输入信号源模块库(Source)输入信号源模块库用来向模型提供输入信号,没有输入口,但是至少有一个输出口.主要有: Constant,Step,Ramp,Sine Wave,Signal Generator,From File,From Workspace,Clock,In.2.系统模块库(System)系统模块主要包括连续模块,离散模块,数学模块,逻辑模块,信号处理模块,系统模块.连续模块主要有:Integrator,Derivative,State-Space,Transfer Fcn,Zero-Pole,Transport Delay.离散模块主要有:Discrete-time Integrator,Discrete Filter,Discrete State-Space,Discrete Transfer-Fcn,Discrete,Zero-Pole,First-Order Hold,Zero-Order Hold,Unit Delay.数学模块主要有:Sum, Product,Dot Product,Gain,Math Function,MinMax,Abs,Sign.逻辑模块主要有:Compare To Zero,Compare to Constant,Inteval Test,Relational Operator,Logical Operator,Bit Set,Bitwise Operator,Bit Clear.信号处理模块主要有:IC,Bus Creator,Bus Selector,Mux,Demux,Switch, Multiport Switch,Manual Switch,Selector.系统模块主要有:SubSystem,Triggered Subsystem, Enabled Subsystem,Function-Call Subsystem,If Action Subsystem.3.接收模块库(Sink)接收模块是用来接收模块信号的,没有输出口,但是至少有一个输入口.主要有:Scope,Dis-play,XY Graph,To File,To Workspace,Stop Simulation,Out.Simulink模块从其行为模式上分可以分为连续模块和离散模块两种.Simulink模型中的每个模块都有一个样本时间,它的取值范围是-1或者非负浮点数.如果这个模块的样本时间是-1,表示其样本时间由其来源模块的样本时间计算而来;如果这个模块的样本时间是0,表示这个模块是连续模块,其计算行为具有连续性;如果是一个正值x,表示该模块为离散模块,其每隔x时间长度重新计算一次.大多数Simulink模块都包含配置参数,用户可以通过修改这些参数来获得预想的功能.比如说常数模块可以设置输出常数值,积分模块可以设置初始值,Switch模块可以设置操作符号类型和阈值.图1描述了一个Simulink模型,其中的Add模块从In1,In2接收了两个输入,通过加法运算产生结果,并通过Out1输出.该模型中In1,In2,Out1和Add分别对应于输入信号源,输出信号源与系统.2.3.2Stateflow介绍Stateflow[2]是Simulink里面的一个工具箱,它是一个基于状态机和流程图来构建组合和时序逻辑决策模型并进行仿真的环境.Stateflow可以将图形表示和表格表示(包括状态转换图,流程图,状态转换表和真值表)结合在一起,针对系统对事件,基于时间的条件以及外部输入信号的反应方式进行建模.用户可以在使用Simulink仿真时,使用这种图形化的工具实现各个状态之间的转换,对复杂的监控逻辑进行建模.Stateflow模型主要由事件变量集合,状态,结点和状态迁移组成:5郭丹青,吕继东,唐涛等:中国高速铁路列控系统的形式化分析与验证图1Simulink 图表Figure 1A Simulink diagram 图2Stateflow 图表Figure 2A Stateflow diagram1.事件变量集合事件变量集合是记录Stateflow 模型中使用的广播事件和变量的集合.广播事件和变量均分为输入输出和局部三种,分别表示从外部环境输入的广播事件或变量,向外部输出的广播事件或变量和内部使用的广播事件或变量.2.状态状态代表了系统现在处在的情况.在Stateflow 下,状态有两种行为:活动的(active)和非活动的(inactive).可以对一个状态进行标记,包括给这个状态规定状态名以及这个状态在进入,退出和处于激活状态下接收到一个事件所应执行的动作,一般表示如下:nameentry:entry actionsduring:during actionsexit:exit actionsbind:data and eventson event_name:on event_name actions入口动作(entry:entry actions)是表示发生状态迁移,激活了该状态时需要执行的动作.中间动作(during:during actions)表示原处于激活的状态受到一个事件的触发,不存在从这个状态发出的状态迁移时,此状态仍处于激活状态需要执行的动作.出口动作(exit:exit actions)表示存在由此状态发出的有效状态迁移时,该状态退出时执行的动作.数据事件绑定动作(bind:data and events)将数据和事件绑定在此状态上.绑定的数据只能在此状态或其子状态内被改写,其他状态只能读取此数据.绑定的事件由此状态或其子状态广播.特定事件发生动作(on event_name:on event_name actions).event_name 规定一个特定的事件;on event_name actions 表示当该状态是激活状态且event_name 规定的事件发生时需要执行的动作.3.结点结点用于描述状态迁移过程中的迁移信号的分离和汇合.通过使用结点,状态和状态之间的迁移不仅仅是边的简单连接,而是一个复杂的迁移网络.6中国科学:信息科学第44卷第?期4.状态迁移状态迁移†一般用于连接两个状态或者结点,它可以被标记,该标记的一般形式为如下四元组: Event Trigger[Condition]Condition Action/Transition Action,触发事件(Evnet trigger)是事件集合中的一个元素,作为迁移条件的一部分.条件(Condition)是一个布尔表达式,与触发事件共同组成状态迁移的迁移条件.触发事件(Evnet trigger)为空或者与当前广播事件一致,同时条件(Condition)为真,则该状态迁移被触发.条件动作(Condition Action)和迁移动作(Transition Action)是使用Matlab的action language书写的代码片段.条件动作在迁移被触发时被立即执行,而迁移动作仅当迁移终点为状态时被立即执行,否则被寄存在一个队列中,若该迁移最终达到一个状态,队列中的迁移动作将被顺序执行.Stateflow模型具有层次化的特性,任意Stateflow状态均可嵌入一个Stateflow子模型来丰富该状态的行为.同一层次中,所有的状态是互斥(OR)或者并行(AND)的,互斥状态之间可以使用迁移进行连接,而并行状态之间不能使用迁移连接.Stateflow通讯采用广播机制,当一个事件被广播时,并行状态按照其预先定义的顺序先后接收到该广播事件,互斥状态仅有激活状态收到该广播事件.当状态接收到一个广播事件之后,进行如下操作:按照预先定义的顺序,对状态的所有外部出口迁移进行检查,如果该迁移网络能成功到达某个状态则执行对应的迁移动作,并完成该轮事件广播;否则,按照预定的顺序对内部出口迁移进行检查,如果该迁移网络能成功到达某个状态则执行对应的迁移动作,并完成该轮事件广播;如果上述两项均不成功,则执行中间动作.然后把广播事件对其包含的子图进行广播.当状态迁移成功时,需要找到源状态和目的状态之间的共同路径,从内至外,执行源状态出口动作至共同路径,然后从外向内,执行目标状态的入口动作.图2描述了一个Stateflow的模型,该图中有两个并行的状态A与B,同时处于激活状态.状态A和状态B中分别包含六个和两个互斥状态,它们层次结构如图2所示.图2中的迁移边包含三种特殊情况:以实心黑点开头的迁移边为默认迁移边,表明该箭头所指状态为默认激活状态;状态S11到S2的迁移为层间迁移;状态S21到S22的迁移为迁移网络,该迁移网络包含一个结点.2.4混成CSP简介2.4.1混成CSPHCSP(Hybrid Communicating Sequential Process)[5,6]在CSP(Communicating Sequential Process)的基础上引入了微分方程以描述在混成系统中的连续动态行为,并同时引入各种中断机制(条件中断和通讯中断)来中断一个连续的微分行为,进而使连续微分行为和离散控制行为交错运行.HCSP能同时刻画系统的连续行为和控制逻辑,并具有CSP高可组合性的特性,是一种很好的用来描述大型控制系统的形式化建模语言.HCSP的语法如下所示:P::=skip|x:=e|ch?x|ch!e|P;Q|B→P|P⊔Q|P∗|⟨F(˙s,s)=0&B⟩|⟨F(˙s,s)=0&B⟩¤ i∈I(io i→Q i)S::=P|S∥S.†默认迁移是一种特殊的迁移,它仅有一个目标状态,表示该状态为默认激活状态.7郭丹青,吕继东,唐涛等:中国高速铁路列控系统的形式化分析与验证上式中P,Q,Q i,S均为HCSP进程,x和s为进程变量,ch为通道名,io i为通信事件(输入事件ch?x或输出事件ch!e),B和e为布尔表达式和算术表达式.以上语法结构的非形式化语义表示如下:skip不执行任何操作,立即终止;x:=e将表达式e的值赋给x;ch?x从通道ch中得到一个值,并将其赋给x;ch!e将e的值发送到通道ch;P;Q先执行进程P,当进程P终止时执行进程Q;B→P在B为真时执行P,否则立刻终止;P⊔Q由系统随机选择是执行进程P还是Q;P∗表示有限次重复执行进程P;⟨F(˙s,s)=0&B⟩代表微分动态过程,该微分过程相关的变量取值必须使得布尔表达式B始终取真值,否则该语句立即终止;⟨F(˙s,s)=0&B⟩¤ i∈I(io i→Q i)与⟨F(˙s,s)=0&B⟩执行过程基本一致,但是当通信事件io i发生时会立刻执行对应进程Q i,否则它会一直执行到微分过程终止为止;S1∥S2中S1和S2为并发进程,在不需要通讯时他们各自独立运行,当需要通讯时通讯双方需要同步执行该通讯过程,并发进程之间不能存在共享变量或是共享输入或者输出通道.2.4.2混成Hoare逻辑在[7]中,我们通过在经典的Hoare逻辑中引入历史公式构建了HCSP的证明系统.之后,[8]将该逻辑在Isabelle/HOL中实现,并利用该工具验证了中国铁路控制系统中的一个实际案例.历史公式由一个时段验算公式[19,20]表达,用于描述系统在执行时间区段内满足的性质.在混成Hoare逻辑(HHL)中,顺序进程P的性质描述由三元组{pre}P{post;HF}来表达,其中pre,post,和HF分别表示前置条件,后置条件,和历史公式.前置条件和后置条件由一阶逻辑公式表达,历史公式由时段验算公式表达.对于并发进程其性质描述如下表示.{pre1,...,pre n}P1∥···∥P n{post1,...,post n;HF1,...,HF n},其中pre,post i和HF i分别表示第i个进程的前置条件,后置条件和历史公式.i3场景描述及其建模过程我们将高速铁路列控系统在等级转换和模式转换的两个场景中涉及的主体抽象为由列控系统,列车与司机组成.列控系统分为多个等级,我们只考虑列车在C2级和C3级下面的行为,所以只涉及C2级列控系统与C3级列控系统,分别是TCC(Train Control Center),RBC(Radio Block Center),其主要作用是根据车载子系统,地面子系统等提供的列车状态,轨道占用,临时限速命令,联锁进路状态,灾害防护等信息产生其控制范围内各个列车的行车许可等控制信息,并且传输给车载设备以控制列车的运行.列车运行的过程中,司机要监控列车的运行,需要经常对不同的情况作出反应.图3是表示整个列控系统的Stateflow模型,其中C2级控制器,C3级控制器,列车和司机四个部分分别由由TCC,RBC,Train和Driver四个状态表示,这四个部分需要并行执行,所以这四个状态之间的关系为并行.列车在运行过程中需要一个动力系统来计算速度,由于动力系统是连续的,因此我们在Stateflow外使用一个子系统来表示,如图4所示,这个子系统的输入是加速度,输出是速度和距离,使用了两个积分模块,分别代表加速度的积分为速度,速度的积分为距离.运营场景是对运营中系统工作方式的简要描述,在这个模型中,我们考虑三个运营场景:行车许可(Movement Authority,MA)场景,控制器会对列车的运行过程进行监控,并且通过MA授权控制列车的行为;等级转换场景,列车在运行中可以从C2级转换到C3级,图5是等级升级场景的一个示意图;模式转换场景,列车在不同的模式下面也会有不同的行为模式,不同等级下面不同的模式之间的转换有不同的行为模式.下面我们会详细介绍这三个场景.因为从文档中推测等级转换和模式转换相结合8。
光通信必读优秀书籍

非线性光学部分介质在强激光场作用下产生的极化强度与入射辐射场强之间不再是线性关系,而是与场强的二次、三次以至于更高次项有关,这种关系称为非线性。
凡是与非线性有关的光学现象称为非线性光学现象,属于非线性光学的研究内容。
非线性光学一方面研究光辐射在非线性介质中传播时由于和介质的非线性相互作用自身所受的影响,另一方面则研究介质本身在光场作用下所表现出的特性。
在光通信中,主要是进入高速通信,10g,尤其是40G,随着入纤光功率的增强,非线性效应逐渐显现,系统设计必须加以考虑这方面的影响,于是在40G里面变出现了形形色色的编码。
以下切入正题1、《Nonlinear Fiber Optics》和《Applications of Nonlinear Fiber Optics》Agrawl ,这2本书从书名大家应该也可以看出是偏重于光纤通信应用的,目前第一个已经到第四版,第二个为第二版了,包括中译本,论坛都有,大家可以搜索下就可以都看到了。
/viewthread. ... =nonlinear%2Boptics/viewthread. ... =nonlinear%2Boptics2、Boyd W.R的《nonlinear optics》3rdW. Boyd教授在2002年被任命为Rochester大学M. Parker Givens Professor of Optics,lz发的应该是第二版,该书1992年第一版,第二版在第一版的基础上增加了很多新内容,并对以前的内容做了不少修订,在2008年的4月,该书又出了第三版。
整体来说,该书内容比较深,学校里的高年级研究生和一般研究人员可参考。
W.Boyd今年5月份曾代表美国光学学会来南京开会下载链接:/viewthread. ... =nonlinear%2Boptics3、华裔学者沈元镶的《非线性光学原理》沈是这方面非常牛b的,他的导师算是非线性光学方面的开创者吧,并因此获得了诺贝尔奖。
求解线性方程组稀疏解的稀疏贪婪随机Kaczmarz算法

大小 k̂ 。②输出 xj。③初始化 S = {1,…,n},x0 = 0,
j = 0。④当 j ≤ M 时,置 j = j + 1。⑤选择行向量
ai,i ∈
{
1,…,n
},每一行对应的概率为
‖a‖i
2 2
‖A‖
2 F
。
⑥
( | ) 确 定 估 计 的 支 持 集 S,S = supp xj-1 max { k̂,n-j+1 } 。
行从而达到加快算法收敛速度的目的。算法 3 给出
稀疏贪婪随机 Kaczmarz 算法。
算法 3 稀疏贪婪随机 Kaczmarz 算法。①输入
A∈ Rm×n,b ∈ Rm,最大迭代数 M 和估计的支持集的
大 小 k̂ 。 ② 输 出 xk。 ③ 初 始 化 S = {1,…,n},x0 =
x
* 0
=
0。④
置
k
=
0
时,当
k
≤
M
-
1
时。⑤计算
( {| | } ϵk=
1 2
‖b
1 - Ax‖k 22
max
1≤ ik ≤ m
bik - aik xk 2
‖a
‖ ik
2 2
+
)1
‖A‖
2 F
(2)
⑥决定正整数指标集
{ | | } Uk =
ik|
bik - aik xk
2
≥
ϵ‖k b
-
Ax‖k
‖22 a
‖ ik
2 2
ï í
1
ï î
j
l∈S l ∈ Sc
其中,j 为迭代步数。当 j → ∞ 时,wj⊙ai → aiS,因此
庞加莱猜想前言
庞加莱猜想-前言Wir m\"ussen wissen! Wir werden wissen!(我们必须知道!我们必将知道!)—— David Hilbert两年前科学版举行过一次版聚,我报告了低维拓扑里面的一些问题和进展,其中有一半篇幅是关于Poincar\'e 猜想。
版聚后,flyleaf 要求大家回去后把自己所讲的内容发在版上。
当时我甚至已经开始写了一两段,但后来又搁置了。
主要是因为自己对于低维拓扑还是一个门外汉,写出来的东西难免有疏漏之处,不敢妄下笔。
两年过去,我对低维拓扑这门学科的了解比原先多了,说话的底气也就比原先足了。
另外,由于Clay 研究所的百万巨赏,近年来Poincar\'e 猜想频频在媒体上曝光;而且Perelman 最近的工作使数学家们有理由相信我们已经充分接近于这一猜想的最后解决。
所以大概会有很多人对Poincar\'e 猜想的来龙去脉感兴趣,我也好借机一偿两年来的宿愿。
现代科学的高速发展使各学科之间的鸿沟加大,不同学科之间难以互相理解,所以非数学专业的读者在阅读本文时可能会遇到一些困难。
但限于篇幅和文章的形式,我也不可能对很多东西详细解释。
一些最基本的拓扑概念如“流形”,我将在本文的附录中解释。
还有一些“同调群”、“基本群”之类的名词,读者见到时大可不去理会它们的确切含义。
我将尽量避免使用这一类的专业术语。
作者并非拓扑方面的专家,对下面要说的很多内容都是道听途说,只知其然而不知其所以然;作者更不善于写作,写出来的东东总会枯燥无味,难登大雅之堂。
凡此种种,还请读者诸君海涵。
问题的由来Consid\'erons maintenant une vari\'et\'e [ferm\'ee] $V$ \`a trois dimensions ... Est-il possible que le groupe fondamental de $V$ ser\'eduise \`a la substitution identique, et que pourtant $V$ ne soit pas simplement connexe?—— Henri Poincar\'e在拓扑学家的眼里,篮球、排球和乒乓球并没有什么不同,它们都同胚于三维空间中的球面S^2. (我们把n+1维欧氏空间中到原点距离为1的点的集合记作S^n,称为n维球面(sphere)。
lqr黎卡提方程
lqr黎卡提方程
摘要:
1.黎卡提方程的定义与背景
2.黎卡提方程的性质与解法
3.黎卡提方程在实际应用中的价值
4.我国对黎卡提方程的研究及贡献
正文:
黎卡提方程,全称为黎卡提微分方程,是由法国数学家克劳德·路易·马里·黎卡提(Claude-Louis-Marie Riqueti, comte de Mirabeau)提出的。
它是一种描述流体力学、传热和化学反应等过程中质量、能量和动量守恒的偏微分方程。
黎卡提方程在自然科学和工程领域具有广泛的应用价值。
黎卡提方程具有以下性质:
1.黎卡提方程是一个线性偏微分方程。
2.黎卡提方程可以表示为质量、能量和动量守恒的数学表达式。
3.黎卡提方程的解法通常包括分离变量法、矩方法、有限元法等。
在实际应用中,黎卡提方程可以用于解决流体力学中的NS 方程(纳维- 斯托克斯方程)和热传导方程,还可以用于研究化学反应过程中的物质传递和能量传递。
通过求解黎卡提方程,可以得到流体速度、压力、温度等物理量,从而为工程设计和优化提供理论依据。
我国学者在黎卡提方程的研究方面做出了重要贡献。
他们不仅对黎卡提方程的解法进行了深入探讨,还将其应用于多个领域,如航空航天、水利工程、
能源开发等。
此外,我国还积极开展与国际学者的交流合作,共同推动黎卡提方程研究的发展。
总之,黎卡提方程作为描述自然现象和工程问题的重要数学模型,具有重要的理论意义和实际价值。
On Maximizing the Second Smallest Eigenvalue of a
On Maximizing the Second Smallest Eigenvalue of aState-Dependent Graph LaplacianYoonsoo Kim and Mehran MesbahiAbstract—We consider theset consisting of graphs of fixed order andweighted edges.The vertex set of graphsinwill correspond to point masses and the weight for an edge between two vertices is a functional of the distance b etween them.We pose the prob lem of finding the b est vertex po-sitional configuration in the presence of an additional proximity constraint,in the sense that,the second smallest eigenvalue of the corresponding graph Laplacian is maximized.In many recent applications of algeb raic graph theory in systems and control,the second smallest eigenvalue of Laplacian has emerged as a critical parameter that influences the stability and ro-bustness properties of dynamic systems that operate over an information network.Our motivation in the present work is to “assign”this Laplacian eigenvalue when relative positions of various elements dictate the intercon-nection of the underlying weighted graph.In this venue,one would then b e able to “synthesize”information graphs that have desirable system theo-retic properties.Index Terms—Euclidean distance matrix,graph Laplacian,networked dynamic systems,semidefinite programming.I.I NTRODUCTIONConsider the set of n mobile elements as vertices of a graph,with the edge set determined by the relative positions between the respective elements.Specifically,we let G denote the set of graphs of order n with vertex set V =f 1;2;...;n g and edge set E =f e ij ;i =1;2;...;n 01;j =2;...;n;i <j g with the weight functionw :R 32R 3!R +assigning to eachedge e ij ,a function of the distance between the two nodes i and j .Thus,we havew ij :=w (x i ;x j )=f (k x i 0x j k )(1)for some f :R +!R +,with x i 2R 3denoting the position of ele-ment i .In our setup the function f in (1)will be required to exhibit a distinct behavior as it traverses the positive real line.For example,we will require that this function assume a constant value of one when the distance between i and j is less than some threshold and then rapidly drop to zero (or some small value)as the distance between these el-ements increases.Such a requirement parallels the behavior of an in-formation link in a wireless network where the signal power at the re-ceiver side is inversely proportional to the some power of the distance between transmitting and receiving elements [18].Using this frame-work,we now consider the configuration problem3:maxx2(L G (x ))(2)where x :=[x 1;x 2;...;x n ]T 2R 3n is the vector of positions for the distributed system,the matrix L G (x )is a weighted graph Laplacian defined element-wise as[L G (x )]ij:=0w ij ;if i =js =iw is ;if i =j(3)Manu script received April 29,2004;revised March18,2005and Au gu st 1,2005.Recommended by Associate Editor C.D.Charalambous.This work was supported by the National Science Foundation under Grant NSF/CMS-0301753.Y .Kim is withth e Department of Engineering,University of Leicester,Lei-ceister LE17RH,U.K.(e-mail:yk17@).M.Mesbahi is with the Department of Aeronautics and Astronautics,Univer-sity of Washington,Seattle,W A 98195-2400USA (e-mail:mesbahi@).Digital Object Identifier 10.1109/TAC.2005.861710and 2(L G (x ))denotes the second smallest eigenvalue of the state-dependent Laplacian matrix L G (x )withits spectru m ordered as1(L G ) 2(L G ) 111 n (L G ):Furthermore,we restrict the feasible set of (2)by imposing the prox-imity constraintd ij :=k x i 0x j k 2 1;for all i =j (4)preventing the elements from getting arbitrary close to each other intheir desire to maximize 2(L G )in (2).The second smallest eigenvalue of the graph Laplacian L G ,also known as the algebraic connectivity of G [4],[8],[14],has emerged as an important parameter in many systems problems defined over net-works [7],[12],[15],[17],[20].In fact,in several recent works [7],[17],[19],it has been observed that 2(L G )is a measure of stability and robustness of the networked dynamic system.This observation im-plies,for example,that small perturbations in the configuration of the networked system will be attenuated back to its equilibrium state(s)witha rate th at is proportional to 2(L G ).When this important graph parameter is considered in a state-dependent setting as proposed in [15],the characterization of a distributed system states that maximize 2(L G )emerges as a natural optimization problem.In this venue how-ever,there are only a handful of studies in the literature that are re-lated to su cha grapheigenvalu e assignment problem (2).In particu lar we mention the work of Fallat and Kirkland [6]where a graph-the-oretical approachh as been proposed to extremize 2(L G )over the set of trees of fixed diameter.Also related to the present work are those by Chung and Oden [5]pertaining to bounding the gap between the first two eigenvalues of graph Laplacians,and Berman and Zhang [2]and Guattery and Miller [11],where,respectively,isoperimetric numbers of weighted graphs and graph embeddings are employed for lower bounding the second smallest Laplacian eigenvalue.We note that maximizing the second smallest eigenvalue of state dependent graph Laplacians over arbitrary graphconstraints is a difficu lt compu tational problem [16].The contribution of this note is to propose an iterative greedy-type algorithm for problem (2)with a guaranteed local conver-gence behavior.Although the convergence of this algorithm is provably local in nature,extensive simulations suggest that it often converges to the global maximum when the initial graph is taken to be a path.The outline of the note is as follows.In Section II-A we delineate on the various possible choices for the edge weights for our state-depen-dent weighted Laplacians.Sections II-B and C are devoted to the main result of the note where an iterative semidefinite programming-based approachis proposed for th e solu tion of problem 3(2).A numerical example is then presented in Section III followed by a few concluding remarks.A few words on the notation.The 2-norm of vector x will be denoted by k x k .The spaces of n 2n real matrices and n 2n real symmetric matrices are designated by R n 2n and S n ,respectively;I n will be the n 2n identity matrix.The inequalities between symmetric matrices are interpreted in the sense of Löwner ordering,i.e.,A >B and A B indicate,respectively,the positive definiteness and positive semidefi-niteness of the matrix difference A 0B .II.M ETHODAs we mentioned in Section I,the general formulation of the problem 3(2)does not readily hint at being tractable,in the sense of admit-ting an efficient algorithm for its solution.Generally,maximizing the second smallest eigenvalue of a symmetric matrix subject to matrix inequalities,does not yield to a standard linear matrix inequality ap-proach[3]and,su bsequ ently,a solu tion procedu re th at relies solely0018-9286/$20.00©2006IEEEFig.1.Several candidates for the function f in(1)where =1and =2.on an interior point method[1].The previous complication however is alleviated in case of graph Laplacians,where the smallest eigenvalue 1(L G)is always zero withth e associated eigenvector of1composed of unit entries.This observation follows directly from the definition(3). Nevertheless,due to the nonlinear dependency of entries of L G on the relative distance d ij and the presence of constraints(4),the problem 3(2)assumes the form of a nonconvex optimization.In light of this fact,we will proceed to propose an iterative SDP-based approachfor this problem.However,before we proceed,we make a few remarks on some judicious choices for the function f in(1).The choice of f in(1)is not only guided by particular applications but also by numerical considerations.A few candidate functions are shown in Fig.1.Although there are a host of choices for f,for our analysis and numerical experimentation we have chosen to work with Type-IV functions(the lower right corner in Fig.1),where f assumes the formf(d ij)= ( 0d)=( 0 ); >0(5) given that d ij 1.1We note that f( 1)=1and f( 2)= .Among the advantages of working with functions(5)are their differentiability properties,as well as their ability to capture a situations that is of prac-tical relevance.In many su chsitu ations,th e strengthof an information link is inversely proportional to the relative distance and decays expo-nentially after a given threshold is passed.Furthermore,and possibly more importantly,functions(5)lead to a stable algorithm for our nu-merical experimentation;a representative set of examples is discussed in Section III.1We have also used functions of the form(1=d),where is a positive number and f( )= .Our simulation results in Section III turned out to be exactly the same for these functions as compared with those obtained using functions of the form(5).A.Maximizing 2(L G)Wefirst present a linear algebraic resu lt in conju nction withth e gen-eral problem of maximizing the second smallest eigenvalue of graph Laplacians.Proposition2.1:Consider the m-dimensional subspace P R n spanned by the vectors p i2R n,i=1;...;m.Denote P:=[p1;...;p m]2R n2m.Then,for M2S n one hasx T Mx>0for all nonzero x2Pif and only ifP T MP>0:(6)Proof:An arbitrary nonzero element x2P can be written asx= 1p1+ 2p2+111+ m p mfor some 1;...; m2R,not all zeros and,thus,x=P y,where y:=[ 1; 2;...; m]T.Consequently,thefirst inequality in(6)is equivalent to(P y)T M(P y)=y T P T MP y>0for all nonzero y2R m,or in other words,having P T MP>0;we note that P T MP2S m.Corollary2.2:For a graphLaplacian L G the constraint2(L G)>0(7) is equivalent toP T L G P>0(8)where P=[p1;p2;...;p n01],and the unit vectors p i2R n are chosen such thatp T i1=0;(i=1;2;...;n01)andp T i p j=0;(i=j):(9) Proof:It is well-known that for G2GL G 0and L G1=0(10)and,thereby,the smallest eigenvalue of L G is always zero and rank L G n01.This implies that(7)is equivalent to havingx T L G x>0;for all nonzero x21?(11) where1?:=f x2R n j1T x=0g:(12)In view of Proposition2.1,the condition(11)is equivalent to having P T L G P>0,with P denoting the matrix of vectors spanning the subspace1?.Without loss of generality,this subspace can be identified withth e basis u nit vectors satisfying(9).Corollary2.3:The problem3(2)is equivalent to3:maxx(13)s:t:d ij:=k x i0x j k2 1(14)P T L G(x)P I n01(15)where i=1;2;...;n01,j=2;...;n,i<j,and the pairwise or-thogonal unit vectors p0i s forming the columns of P span the subspace 1?(12).Proof:The proof follows from Corollary2.2.One of the consequences of Corollary2.3pertains to the following graphsynth esis problem2:determine graphs satisfying an upper bound on the number of their edges with maximum smallest second Laplacian eigenvalue.Although this problem will not be further considered in this note,we point out that it can be reformulated asmaxG2Gf j Trace L G ;P T L G P I n01gwhere P is defined as in Corollary2.3and is twice the maximum number of edges allowed in the desired graph.In this venue,a compli-cation that needs to be further addressed pertains to the integrality of the entries of the sought matrix L G.B.Discrete and GreedyWe now proceed to view the problem3(2)in an iterative setting, where the goal is shifted towardfinding an algorithm that attempts to maximize the second smallest eigenvalue of the graph Laplacian at each step.Toward this aim,wefirst differentiate(14)with respect to time as 2f_x i(t)0_x j(t)g T f x i(t)0x j(t)g=_d ij(t)(16) and then employ Euler’sfirst discretization method,with1t as the sampling timex(t)!x(k);_x(t)!x(k+1)0x(k)1t2This connection was pointed to us by one of the referees.to rewrite(14)as2f x i(k+1)0x j(k+1)g T f x i(k)0x j(k)g=d ij(k+1)+d ij(k): Similarly,the state dependent Laplacian L G(x)in(15)is discretized by first differentiating the terms w ij with respect to time,and then having w ij(k+1)=w ij(k)0 ( 0d(k))=( 0 )f d ij(k+1)0d ij(k)grecall that we are employing functions of the form(5)in(1).The dis-crete version of the state dependent Laplacian,L G(k),assumes the form[L G(k)]ij=0w ij(k);if i=js=iw is(k);if i=j.Putting it all together,we arrive at the iterative step of solving the op-timization problem3k:maxx(k+1)(17)s:t:2f x i(k+1)0x j(k+1)g T f x i(k)0x j(k)g=d ij(k+1)+d ij(k)(18)d ij(k+1) 1(19)P T L G(k+1)P I n01(20)for i=1;2;...;n01,j=2;...;n,i<j,and x(k):= [x1(k);x2(k);...;x n(k)]T2R3n.Thereby,the algorithm is ini-tiated at time k=0withan initial graph(configu ration)G0,and then for k=0;1;2;...,we proceed to iterativelyfind a graphth at maximizes 2(L G(k+1)).This greedy procedure is then iterated upon until the value of 2(L G(k))can not be improved further.We note that the proposed greedy algorithm converges,as the sequence generated by it is nondecreasing and bounded from above.3C.Further ConsiderationsIn previous section,we proposed an algorithm that converges to a local optimal vertex positional configuration,in terms of maximizing the quantity 2(L G).However,by replacing the nonconvex constraint (14)withits linear approximation(18)–(19),one introdu ces a poten-tial inconsistency between the position and the distance vectors.In this section,we provide two remedies to avoid such potential com-plications.Let usfirst recall the notion of Euclidean distance matrix (EDM).Given the position vectors x1;x2;...;x n2R3,the EDM D=[d ij]2R n2n is defined entry-wise as[D]ij=d ij=k x i0x j k2;for i;j=1;2;...;n:The EDM matrices are nicely characterized in terms of linear matrix inequalities[10].Theorem2.4:A matrix D=[d ij]2R n2n is an EDM if and only ifJDJ 0(21)d ii=0;for i=1;2;...;n(22) where J:=I n011T=n.3The second smallest eigenvalue ofL for a graphof order n is bounded from above by n01[9].Fig.2.Trajectory generated by the proposed algorithm for six nodes in R:the configuration evolves from a path(circles)to a truss(squares).Fig.3.Trajectory generated by the proposed algorithm for six nodes in R:the configuration evolves from a path(circles,1;...;6)to an octahedron(squares, 1;...;6).Theorem2.4allows us to guarantee that by adding the two convexconstraints(21)–(22)to problem3k(17)–(20),we always obtainconsistency among the position and distance variables at each iterationstep.Moreover,by updating the values of d ij(k)’s and[L(k)]ij’s in(18)and(20)after calculating the values of x(k),we can furtherreduce the effect of linearization in the proposed procedure.To furtherexpand on this last point,suppose that x1(k);x2(k);...;x n(k), d ij(k)’s and[L(k)]ij,i=1;2;...;n01,j=2;...;n,i<j,h ave been obtained after solving the problem3k(17)–(20).Our proposed modification to the original algorithm thus amounts to updating the values of d ij(k)and[L(k)]ij,based on the computed values of x1(k);x2(k);...;x n(k),before initiating the next iteration.III.S IMULATION R ESULTSFor our simulations we used SeDuMi[1]to solve the required semidefinite programs.Fig.2depicts the behavior of six mobile elements under the guidance of the proposed algorithm,leading to a planar configuration that locally maximizes 2(L G).The constants , 1,and 2in(5)are chosen to be0.1,1,and1.5,respectively. The algorithm was initialized with a configuration that corresponds to a path.The sequence of configurations thereafter converges to the truss-shape graph with the 2(L G)of1.6974.For these set of param-eters,the truss-shape graph as suggested by the algorithm is the global maximum over the set of graphs on six vertices that can be configured in R2.4Using the same simulation scenario,but this time,in search of an optimal positional configuration in R3,the algorithm leads to the trajectories shown in Fig.3.In this case,the graph sequence converges to an octahedron-shape configuration with 2(L G)=4:02. Increasing the number of nodes to eight,the algorithm was initial-ized as the unit cube;the resulting trajectories are shown in Fig.4.4A global maximum may be found in the following exhaustive manner:First, define a space large enou ghgu aranteed to contain th e optimal configu ration. Then grid this region and search over the set of all n grid points for the config-uration that leads to maximum (L).Fig.4.Evolution of the proposed algorithm for eight nodes in R :the configuration evolves from 3-cube (circles)to octahedron (squares).TABLE IC OMPARING THE V ALUES FOR THE T YPE -IV W EIGHTED G RAPH G AS R EALIZED BY THE A LGORITHM AND T HOSE C ORRESPONDING TO THEA SSOCIATED 0–1W EIGHTED G RAPHGIn this figure,the edges between vertices i and j indicate that d ij 2=1:5.The solid lines in Fig.4represent the final configuration with 2(L G )=2:7658.Once again,an exhaustive search procedure indicates that the proposed algorithm does lead to the global optimal configuration (see Table I).We like to remark however that the choice for the function f in (5)and the initial configuration,are critical to the performance of the proposed algorithm.For example,when this func-tion is chosen to be of Type-I in Fig.1and the initial graph as a dis-connected graph,the algorithm terminates right after initialization,as any small perturbation on the initial graph does not lead to an improve-ment in the value of 2(L G ).Choosing a Type-IV function in Fig.1on the other hand,always lead to a connected configuration with a posi-tive 2(L G ),even when the algorithm is initialized via a disconnected graph.IV .C ONCLUDING R EMARKSWe considered the problem of maximizing the second smallest eigenvalu es of a state-dependent graphLaplacian.Th is problem is of importance,for example,when the positions of a set of dynamic elements-operating over an information network-can be chosen for robust system performance.We proposed an iterative algorithm for this problem that employs a semidefinite programming solver at each recursive step.Although the algorithm has a local convergence behavior,extensive simulations suggest that it often leads to a globally optimal state configuration.A CKNOWLEDGMENTThe authors gratefully acknowledge suggestions and comments by the anonymous reviewers.R EFERENCES[1]SeDuMi.McMaster Univ..[Online].Available:http://sedumi.mc-master.ca[2] A.Berman and X.-D.Zhang,“Lower bounds for the eigenvalues of Laplacian matrices,”Linear Alg.Appl.,vol.316,pp.13–20,2000.[3]S.Boyd and L.Vandenberghe,Convex Programming .Cambridge,U.K.:Cambridge Univ.Press,2003.[4] F.R.K.Chung,Spectral Graph Theory .Providence,RI:AMS,1997.[5]F.R.K.Chung and K.Oden,“Weighted graph Laplacians and isoperi-metric inequalities,”Pacific J.Math.,vol.192,no.2,pp.257–273,2000.[6]S.Fallat and S.Kirkland,“Extremizing algebraic connectivity subject to graphth eoretic constraints,”Elect.J.Linear Alg.,vol.1,no.3,pp.48–74,1998.[7]J.A.Fax and R.M.Murray,“Information flow and cooperative control of vehicle formations,”IEEE Trans.Autom.Control ,vol.49,no.9,pp.1465–1476,Sep.2004.[8]M.Fiedler,“A property of eigenvectors of nonnegative symmetric ma-trices and its applications in graphth eory,”Czech.Math.J.,vol.100,no.26,pp.619–633,1975.[9] C.Godsil and G.Royle,Algebraic Graph Theory .New York:Springer-Verlag,2001.[10]J.Gower,“Properties of Euclidean and non-Euclidean distance ma-trices,”Linear Alg.Appl.,vol.1,no.67,pp.81–97,1985.[11]S.Guattery and ler,“On the quality of spectral separators,”SIAM J.Matrix Anal.Appl.,vol.19,no.3,pp.701–719,1998.[12] A.Jadbabaie,J.Lin,and A.S.Morse,“Coordination of groups of mobile autonomous agents using nearest neighbor rules,”IEEE Trans.Autom.Control ,vol.48,no.9,pp.988–1001,Sep.2003.[13]Y .Kim and M.Mesbahi,“Quadratically constrained attitude control via semidefinite programming,”IEEE Trans.Autom.Control ,vol.49,no.5,pp.731–735,May 2004.[14]R.Merris,“Laplacian matrices of graphs:A survey,”Linear Alg.Appl.,vol.197,no.1,pp.143–176,1994.[15]M.Mesbahi,“On state-dependent dynamic graphs and their control-lability properties,”IEEE Trans.Autom.Control ,vol.50,no.3,pp.387–392,Mar.2005.[16]H.Q.Ngo and D.-Z Du,“Notes on the complexity of switching net-works,”in Advances in Switching Networks ,H.Q.Ngo and D.-Z.Du,Eds.Norwell,MA:Kluwer,2000,pp.307–357.[17]R.Olfati-Saber and R.M.Murray,“Consensus problems in networks of agents withswitch ing topology and time-delays,”IEEE Trans.Autom.Control ,vol.49,no.9,pp.1520–1533,Sep.2004.[18]K.Pahlavan and A.H.Levesque,Wireless Information Networks .New York:Wiley,1995.[19]H.Tanner, A.Jadbabaie,and G.Pappas,“Flocking in fixed and switching networks,”Automatica,submitted for publication.[20]L.Xiao and S.Boyd,“Fast linear iterations for distributed averaging,”Syst.Control Lett.,vol.53,pp.65–78,2004.。
溴到硼酸酯
Materials Chemistry C
Published on 20 November 2014. Downloaded on 08/12/2016 07:54:22.
PAPER
View Article Online
View Journal | View Issue
Cite this: J. Mater. Chem. C, 2015, 3, 861
However, these oligouorene functionalized oligomers may suffer from the unwanted long wavelength emission under long-term device operation, similar to polyuorene-based macromolecules.34–36
Received 26th September 2014 Accepted 17th November 2014 DOI: 10.1039/c4tc02173h /MaterialsC
Starburst 4,40,400-tris(carbazol-9-yl)triphenylamine-based deep-blue fluorescent emitters with tunable oligophenyl length for solution-processed undoped organic lightemitting diodes†
Introduction
Since 1987, organic light-emitting diodes (OLEDs) have attracted tremendous attention due to their potential applications in at-panel displays and solid-state lightings.1–10 To achieve fullcolor displays, three primary RGB luminescent materials with excellent stability, efficiency and color purity are required. With respect to green and red counterparts, it seems to be a big challenge to develop blue emitters, especially deep-blue ones that have a Commission Internationale de l'Eclairage (CIE) y coordinate value of <0.10, because the intrinsic wide bandgap would inevitably result in inefficient charge injection to an emitting layer (EML).11 Therefore, great efforts should be paid to the design of deep-blue emitters to push forward the commercialization of full-color OLEDs.
径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法
Journal of Mechanical Strength2023,45(5):1108-1116DOI :10.16579/j.issn.1001.9669.2023.05.014∗20211225收到初稿,20220217收到修改稿㊂国家自然科学基金项目(51905146,12102122),河北省博士后择优资助基金(B2021005004)资助㊂∗∗赵子达,男,1997年生,河北保定人,汉族,河北工业大学硕士研究生,主要研究方向为工业机器人可靠性分析㊂∗∗∗欧阳衡(通信作者),男,1992年生,湖南衡阳人,汉族,河北工业大学机械工程学院讲师,主要研究方向为可靠性分析与设计理论㊂径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法∗RELIABILITY ANALYSIS ON HYBRID SURROGATE MODEL OF RADIAL BASIS FUNCTION AND SPARSE POLYNOMIALCHAOS EXPANSION赵子达∗∗1㊀张德权1㊀欧阳衡∗∗∗1㊀武泽平2(1.河北工业大学机械工程学院省部共建电工装备可靠性与智能化国家重点实验室,天津300401)(2.国防科技大学空天科学学院,长沙410073)ZHAO ZiDa 1㊀ZHANG DeQuan 1㊀OUYANG Heng 1㊀WU ZePing 2(1.Key Laboratory of Reliability and Intelligence of Electrical Equipment ,School of Mechanical Engineering ,Hebei University of Technology ,Tianjin 300401,China )(2.College of Aerospace Science and Engineering ,National University of Defense Technology ,Changsha 410073,China )摘要㊀为解决现有代理模型在可靠性分析中存在的普适性差㊁分析精度低的问题,提出一种融合径向基函数(Radial Basis Function,RBF)和稀疏多项式混沌(Sparse Polynomial Chaotic Expansion,SPCE)展开的混合代理模型,实现功能函数的快速准确预示,从而提高可靠性分析的工程适用性和计算精度㊂采用正交匹配追踪技术求解多项式混沌(Polynomial Chaotic Expansion,PCE)展开中的重要项,获得SPCE 展开模型,并将其增广到RBF 代理模型中,形成RBF-SPCE 展开混合代理模型,提高代理模型的预测精度,进而结合蒙特卡洛模拟(Monte Carlo Simulation,MCS)方法开展复杂结构的可靠性分析㊂三个数值算例对比了所提方法与传统RBF 方法及增广RBF 方法的具体差异㊂结果表明,所提方法对结构可靠性分析具有更高的精度和效率㊂最后,汽车侧面碰撞的工程算例说明所提方法对复杂问题具有良好的工程适用性㊂关键词㊀径向基函数㊀稀疏多项式混沌展开㊀混合代理模型㊀可靠性分析㊀计算效率中图分类号㊀TB114.3Abstract ㊀To resolve the poor universality and low accuracy of the existing surrogate models for reliability analysis,a hybridsurrogate model based on radial basis function (RBF )and sparse polynomial chaotic expansion (SPCE )was proposed.Itrealized rapid and accurate prediction of performance functions to improve the engineering applicability and the accuracy of structural reliability analysis.Importantly,the orthogonal matching pursuit technology was applied to obtain the important terms inPCE,and an SPCE model could be established directly to form the RBF-SPCE model for improving the prediction accuracy of surrogate model.Subsequently,the reliability analysis of complex structures is carried out based on Monte Carlo simulation(MCS).In this work,three simulation cases were implemented to compare the performance of the proposed method with the traditional RBF model and augmented RBF model.The results illustrated that the proposed method has higher accuracy andefficiency for structural reliability analysis.Finally,a vehicle side impact engineering example illustrated that the proposedmethod has good engineering applicability for complex problems.Key words ㊀Radial basis function ;Sparse polynomial chaotic expansion ;Hybrid surrogate model ;Reliabilityanalysis ;Computational efficiencyCorresponding author :OUYANG Heng ,E-mail :ouyangheng @ ,Tel :+86-22-60202050The project supported by the National Natural Science Foundation of China (No.51905146,12102122),and the HebeiProvincial Department of Human Resources and Social Security of China (No.B2021005004).Manuscript received 20211225,in revised form 20220217.㊀第45卷第5期赵子达等:径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法1109㊀㊀0㊀引言㊀㊀在航空航天设备㊁特种装备㊁土木结构等复杂工程设计问题中,广泛存在着因材料差异㊁几何特性和边界条件所引入的各类不确定性因素,导致产品实际性能与设计状态之间存在偏差,进而可能影响结构可靠性与安全性[1-4]㊂结构可靠性通过定量分析这些不确定性的影响,合理评估失效概率,以保证结构安全㊂大型工程结构中由于涉及的各种不确定性变量与实际模型之间的响应关系复杂㊂因此,在对复杂工程结构进行可靠性分析时,通常需要采用有限元分析方法来得到实际模型的对应响应,计算成本较高㊂为降低有限元分析所导致的昂贵成本,各类代理模型迅速发展起来,并在实际工程中得到了广泛应用[5]㊂经典的代理模型包括响应面模型(Response Surface Method,RSM)㊁Kriging模型㊁径向基函数(Radial Basis Function,RBF)㊁多项式混沌展开(Polynomial Chaos Expansion,PCE)等[6-7],其中,RBF 能够以较高的拟合精度拟合高度非线性的极限状态函数,从而有效地处理高维非线性问题㊂张天龙等[8]引入了基于主动学习的RBF代理模型方法,提高了模型计算的效率与稳定性,解决了强度折减法在边坡系统可靠性分析当中计算成本过高的问题㊂刘鑫等[9]基于RBF建立了乘员约束系统的代理模型,并应用于近似可靠性优化设计问题中,高效准确地为汽车乘员约束系统匹配最佳的设计参数㊂然而,传统的RBF方法无法较好地拟合线性系统[10],将多项式增广到RBF 模型可以有效解决该问题,该方法能够充分利用所有样本点,广泛应用于结构可靠性分析和设计领域㊂WEI Y等[11]针对含隐式和非线性极限状态函数的可靠性分析问题,提出了一种基于协同主动学习策略的增广RBF代理模型,用于含隐式和非线性功能函数的可靠性分析㊂胡常福等[12]针对结构极限承载力的可靠性分析中计算成本过高的问题,将不同次数增广基多项式引入到RBF响应面模型,有效减少了计算成本㊂WU Z P等[13]为了解决工程中的全局敏感性分析问题,提出一种正交增广RBF方法来估计Sobol指数,提高了RBF模型拟合复杂极限状态函数的适应性㊂近年来,PCE方法作为一种流行的代理模型,采用不同正交多项式近似替代原复杂模型,广泛应用于不确定量化分析及敏感性分析等领域㊂黄悦琛等[14]为了对无人机飞行性能展开不确定性分析,基于广义PCE方法建立了代理模型,较蒙特卡洛方法大幅提升了计算效率㊂刘安民等[15]针对气动力参数对翼伞飞行性能的不确定性量化评估问题,采用PCE方法建立代理模型,在不降低精度的前提下提高了计算效率㊂李阳天等[16]针对求解PCE系数中出现的过拟合问题,提出一种改进的PCE方法,有效解决了PCE系数过拟合的问题㊂ZHANG X F等[17]提出一种有效的结构不确定性分析的PCE方法,克服了一般多项式混沌展开过程中存在的维数问题㊂赵威等[18]为解决传统PCE方法的多重共线性问题,提出一种稀疏偏最小二乘回归-多项式混沌展开代理模型方法,实现了较高精度的结构可靠度分析㊂TORII A J等[19]提出了一种解决基于风险和可靠性的设计优化问题的方法,该方法结合PCE与梯度算法进行失效概率评估和灵敏度分析,从而减轻此类问题所需的计算负担㊂PAN Q等[20]为了克服最小二乘法求解容易产生过拟合的缺点,利用贝叶斯分析给出的预测均值和方差,提出了一个学习函数选择信息量最大的样本构建PCE,以提升计算效率㊂然而,目前代理模型研究领域中,仍缺乏将RBF 和PCE两者优点相结合所发展的可靠性分析方法㊂PCE方法通过正交多项式的线性组合逼近真实模型,具有正交特性,能够表征模型响应的全局行为,并与输入随机变量的联合分布相联系㊂同样,RBF方法采用基函数的线性组合来近似模型响应㊂因此,融合RBF 与PCE的代理模型方法能够兼具两种方法的优点,提高模型预测能力㊂本文提出一种径向基函数和稀疏多项式混沌(RBF and Sparse Polynomial Chaotic Expansion,RBF-SPCE)相融合的混合代理模型的可靠性分析方法,将SPCE中重要的基函数项增广到RBF 代理模型,结合两种模型各自优势,在减少样本点的前提下提高计算效率㊂1㊀多项式混沌展开及径向基函数代理模型1.1㊀多项式混沌展开代理模型㊀㊀PCE是用一组与输入变量分布类型相应的正交多项式之和来近似隐式函数的高精度代理模型㊂该模型在概率论框架下具有表达任意有限方差随机响应的能力,且对于光滑的输入输出关系能够迅速收敛㊂PCE模型利用不同正交多项式来分别对应不同变量分布,对应关系如表1所示㊂因此,PCE模型可表示为[21]597-617y=f(x)=ðm j=1λj p j(x)(1)式中,j为PCE项数;λj为第j个待求解的PCE系数;m为PCE的总项数;pj(x)为第j维标准随机变量所对应的一维正交多项式基函数的乘积,可采用式(2)表征㊂pj(x)=ᵑd k=1ϕj k(x k)(2)式中,k为随机变量维数;ϕj k(x k)为第k维随机变量x k㊀1110㊀机㊀㊀械㊀㊀强㊀㊀度2023年㊀所对应的一维正交多项式基函数;d 为随机变量维数㊂PCE 的总项数m 由PCE 的最高阶数p 和随机变量维数d 共同决定,具体函数关系可表示为m =(d +p )!d !p !(3)表1㊀不同分布类型对应的典型正交多项式Tab.1㊀Typical orthogonal polynomials correspondingto different distribution types分布类型Distribution type概率密度函数Probability density function正交多项式Orthogonal polynomial高斯分布Gaussian distribution1/2πexp(-x 2/2)埃尔米特Hermite 均匀分布Uniform distribution1/2勒让德Legendre 伽玛分布Gamma distributionx a e-x拉盖尔Laguerre 贝塔分布Beta distribution(1-x )a (1+x )bB(a )B(b )雅可比Jacobi依据变量的不同分布类型选取对应的正交基函数构建PCE 模型,其中PCE 模型系数的求解是该方法中关键步骤,决定了代理模型的精度,从而影响到可靠性分析的精度㊂一种方法是基于Galerkin 投影法,利用正交多项式基函数的正交性,将PCE 模型依次投影到混合多项式上,获得PCE 模型的系数;另一种方法是基于线性回归法,利用最小二次回归估算PCE 模型系数㊂回归法相比于Galerkin 投影法,PCE 模型收敛速度更快,算法步骤如下:步骤1:实验设计㊂通过拉丁超立方抽样(LatinHypercube Sampling,LHS)得到一组输入变量的样本X =(x 1,x 2, ,x n )T (n 为样本点个数),并计算所得样本点处原模型的响应值F =(f (x 1),f (x 2), ,f (x n ))T ㊂步骤2:求取PCE 模型的展开系数㊂将样本X =(x 1,x 2, ,x n )T 和对应的响应值F =(f (x 1),f (x 2), ,f (x n ))T分别代入式(1)PCE 模型左端和右端得p 1(x 1)p 2(x 1) p m (x 1)p 1(x 2)p 2(x 2) p m (x 2)︙︙︙p 1(x n )p 2(x n )p m (x n )éëêêêêêêùûúúúúúúλ1λ2︙λm éëêêêêêêùûúúúúúú=f (x 1)f (x 2)︙f (x n )éëêêêêêêùûúúúúúú(4)式(4)可简写为Pλ=F(5)式中,P =p 1(x 1)p 2(x 1) p m (x 1)p 1(x 2)p 2(x 2) p m (x 2)︙︙︙p 1(x n )p 2(x n )p m (x n )éëêêêêêêùûúúúúúú,λ=λ1λ2︙λm éëêêêêêêùûúúúúúú,F =f (x 1)f (x 2)︙f (x n )éëêêêêêêùûúúúúúú(6)㊀㊀PCE 模型的展开系数向量λ的计算式为λ=(PP T )-1P T F(7)㊀㊀步骤3:采取蒙特卡洛模拟(Monte CarloSimulation,MCS)方法,利用步骤2获得的PCE 模型进行可靠性分析㊂在求解PCE 模型系数过程中,PCE 模型总项数随着随机变量维数和最高阶数的增加而急剧增加,从而导致 维数灾难 ,大幅增加了计算成本㊂为平衡计算效率和计算精度,应采取更加高效的方法求解PCE 展开系数㊂根据稀疏效应准则[22],对PCE 模型结果影响较大的展开式主要是单一输入变量的多项式基函数和变量之间的低阶交叉项,其余混合多项式对应的PCE 模型系数趋近于0,对PCE 模型精度影响较小,从而减少混合基函数的选取数量,提高建立PCE 模型的效率㊂为了高效地求解PCE 模型展开系数,采取正交匹配追踪算法[23]进行重要基函数的选取㊂1.2㊀RBF 代理模型㊀㊀RBF 代理模型可表示为[24]f R (x )=ðn i =1w iφ( x-x i )(8)式中,φ为径向基函数; x -x i 为两点间的欧氏距离;w i 为待求解未知权重系数㊂将样本点代入RBF 模型后,可得AW =F(9)其中,A =φ( x 1-x 1 )φ( x 1-x 2 ) φ( x 1-x n )φ( x 2-x 1 )φ( x 2-x 2 )φ( x 2-x n )︙︙︙φ( x n -x 1 )φ( x n -x 2 )φ( x n -x n )éëêêêêêùûúúúúú,W =λ1λ2︙λn éëêêêêêêùûúúúúúú,F =f (x 1)f (x 2)︙f (x n )éëêêêêêêùûúúúúúú(10)㊀㊀RBF 代理模型的待求解权重系数向量W 为W =(AA T )-1A T F(11)㊀㊀由于使用了高度非线性的径向基函数,式(8)中的RBF 模型可以精确拟合非线性响应,但仍无法较好拟合线性响应㊂为了解决该问题,将多项式增广到RBF 代理模型中,表示如下:f (x )=ðni =1w iφ( x-x i )+ðqj =1b jc j(x )(12)㊀第45卷第5期赵子达等:径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法1111㊀㊀式中,b j 为由于多项式项而在插值中引入的q 个未知系数;c j (x )为增广多项式中的第j 项,对于二维问题,增广多项式中的单项依次为[1,x ,y ,x 2,xy ,y 2, ]T ㊂式(12)中引入的额外q 个未知系数的数量取决于多项式阶数和问题维数d ,其函数关系为q =1常数q =d +1线性多项式q =(d +1)(d +2)/2二次多项式q =(d +1)(d +2)(d +3)/6三次多项式ìîíïïïïï(13)㊀㊀RBF 模型的增广可采用线性或二次多项式等函数,本文只研究增广线性多项式(Linear Polynomial,LP)函数的RBF 模型㊂在本文余下部分,皆用RBF-LP 表示增广线性多项式函数的RBF 模型㊂式(12)中存在n 个方程,n +q 个未知系数,未知系数数量大于可用方程数量㊂因此,由下列q 个正交约束条件可得到附加的q 个方程,从而求解附加未知系数:ðni =1w i c j(x i)=0(14)式中,j =1,2, ,q ㊂结合式(12)㊁式(14),可得到(n +p )个方程,其矩阵形式表示为A C C T()W B()=F()(15)式中,C =c 1(x 1)c 2(x 1) c q (x 1)c 1(x 2)c 2(x 2) c q (x 2)︙︙︙c 1(x n )c 2(x n )c q (x n )éëêêêêêêùûúúúúúú,B =b 1b 2︙b q éëêêêêêêùûúúúúúú(16)㊀㊀求解式(15)的方程组得到W ㊁B ,表示为W B()=A C CT()-1F()(17)㊀㊀由式(8)㊁式(12)可以看出,RBF 模型在抽样点上预测的函数值与对应的真实函数值相等㊂因此,方差分析法无法检验RBF 模型的准确性,应使用非设计点对RBF 模型进行评估㊂非设计点的均方根误差R RMSE 为R RMSE =ðti =1[f (x i)-f ᶄ(x i )]2/t(18)式中,t 为非设计点的个数;f (x i )为第i 个非设计点的真实函数值;f ᶄ(x i )为RBF 模型在第i 个非设计点处的预测函数值㊂式(8)㊁式(12)分别为RBF 和RBF-LP 代理模型的表达式,在构建模型并求出未知系数后,这两个代理模型都具有显式的函数表达式,任意输入都可以通过构建好的RBF 模型求出对应的响应,可采用MCS 方法求解失效概率[25]:P ^f ʈ1N ðNi =1I [f (x i )ɤ0](19)式中,P ^f 为预测失效概率;N 为MCS 的样本数;I [㊃]为指示函数,表示为I [㊃]=1f (x i )ɤ0f (x i )>0{(20)2㊀RBF-SPCE 代理模型㊀㊀现有径向基函数代理模型研究中主要采取多项式增广㊂PCE 模型不仅能够拟合线性响应,还具有良好的全局拟合能力,与径向基函数代理模型相结合的方法已在全局敏感性分析和可靠性优化领域得到应用[21]597-617[26]㊂为了减少样本点数量并提高代理模型预测精度,从而保证可靠性分析的求解效率,本文采用SPCE 模型代替RBF-LP 模型中的线性多项式项,RBF-SPCE 模型的表达式为f (x )=ðn i =1w iφ( x-x i )+ðmj =1λj p j(x )(21)式中,φ( x -x i )㊁p j (x )分别为径向基函数和正交PCE 多项式㊂在本方法中,利用RBF 模型逼近强非线性多项式,利用PCE 模型逼近弱非线性多项式㊂在RBF 项中,最优形状参数c 的确定是一个全局优化问题,采用粒子群优化[27](Particle Swarm Optimization,PSO)算法求解㊂该方法通过模拟鸟类群集或鱼群的行为从而在问题空间中寻找最优解决方案㊂具有惯性权值的PSO 算法能保证较好的全局收敛性,因此本文采用该算法,主要步骤如下:v ij (t +1)=wv ij (t )+c 1r 1(t )[p ij (t )-x ij (t )]+c 2r 2(t )[p g j (t )-x ij (t )](22)式中,x ij (t +1)=x ij (t )+v ij (t +1)(23)式中,c 1㊁c 2均为学习因子;r 1㊁r 2均为[0,1]范围内的均匀随机数;i =1,2, ,N ,其中N 为粒子个数;j =1,2, ,D ,其中D 为搜索空间维数;v ij 为粒子速度;x ij为当前迭代中的粒子;p ij 为存储第i 个粒子当前搜索到的最优位置,即个体极值;p g j 为存储整个粒子群当前搜索到的最优位置,即全局极值;w 为惯性权重,表示当前迭代速度与上一次迭代速度的关系㊂采用较多的是动态惯性权重,表达式为w =w max -(w max -w min )tT max(24)式中,T max 为最大进化代数;w max ㊁w min 分别为最大和最小惯性权重,在本文中取w max =0.9,w min =0.4;t 为当㊀1112㊀机㊀㊀械㊀㊀强㊀㊀度2023年㊀前迭代次数㊂式(21)存有n 个方程,n +m 个未知系数,未知量大于可用方程㊂因此,由下列m 个正交约束条件可得出附加的m 个方程,从而求解附加系数为ðni =1w i p j(x i)=0(25)式中,j =1,2, ,m ㊂结合式(21)和式(25),得到(n +m )个方程,其矩阵形式表示为A P P T()W λ()=F0()(26)式中,P =p 1(x 1)p 2(x 1) p m (x 1)p 1(x 2)p 2(x 2) p m (x 2)︙︙︙p 1(x n )p 2(x n )p m (x n )éëêêêêêêùûúúúúúún ˑm,λ=λ1λ2︙λm éëêêêêêêùûúúúúúú,F =f (x 1)f (x 2)︙f (x n )éëêêêêêêùûúúúúúú(27)㊀㊀RBF-SPCE 代理模型的待求解系数向量W 和展开系数向量λ可求得W λ()=A P P T()-1F()(28)㊀㊀在求解出RBF-SPCE 代理模型系数后,采用MCS 方法求解失效概率,具体算法过程如下:步骤1:生成具有n 个样本点的初始样本集,初始迭代次数设置为k =1,采用LHS 方法生成RBF-SPCE 代理模型的初始样本集㊂步骤2:对步骤1中生成的初始样本集求得原计算模型对应的响应值㊂对于实际问题,需采用有限元法计算模型响应㊂步骤3:更新样本集从而包含所有样本点,n =n +m ㊂在第一次迭代中,k =1,m =0,不添加额外的样本点㊂步骤4:采用正交匹配追踪算法筛选出RBF-SPCE 模型中重要的基函数㊂步骤5:使用样本点集n ,采用式(17)构建RBF-SPCE 代理模型㊂步骤6:采用MCS 方法计算第k 次迭代时RBF-SPCE 代理模型的失效概率P f ㊂步骤7:判断是否满足收敛准则㊂如果满足收敛准则,则迭代停止;否则,继续执行步骤8㊂本文中采用的收敛准则是失效概率P f 在两个连续迭代步的相对误差小于容许值,容许值设置为1%㊂步骤8:生成带有m 个样本点的额外样本集,更新迭代次数k ,进行下一轮迭代㊂步骤9:对步骤8生成的额外样本集m 求取原模型对应的响应值,返回步骤3㊂基于RBF-SPCE 代理模型的可靠性分析方法具体流程如图1所示㊂图1㊀RBF-SPCE 代理模型运算流程Fig.1㊀Flowchart of RBF-SPCE surrogate model3㊀数值算例㊀㊀算例1:该算例为二维问题,功能函数为g X ()=exp(0.2x 1+6.2)-exp(0.47x 2+5.0)(29)式中,x 1㊁x 2均为不确定变量,具体分布如表2所示㊂表3中给出了不同可靠性方法在求解算例1问题的结果㊂由表3可以看出,直接采用MCS 方法得到的失效概率为0.9372%,相比于RBF 模型和RBF-LP 模型的22次功能函数调用次数,RBF-SPCE 模型在调用20次㊀第45卷第5期赵子达等:径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法1113㊀㊀功能函数后就达到稳定,且相对误差0.619%也小于RBF 和RBF-LP 模型㊂图2给出了在初始样本点相同的情况下,随着不断迭代增加样本点,三种方法计算得到失效概率的变化情况㊂表2㊀算例1不确定变量分布Tab.2㊀Distributions of uncertain variables for example 1变量Variable 均值Mean 标准差Standard deviation分布类型Distribution x 11正态分布Gaussian distributionx 201正态分布Gaussian distribution表3㊀不同可靠性方法求解算例1问题的对比Tab.3㊀Comparison of different reliability methods in example 1方法Method 失效概率Failure probability /%相对误差Relative error /%功能函数调用次数Number of performance functionRBF0.89804.18322RBF-LP 0.92201.62222RBF-SPCE 0.94300.61920MCS0.9372图2㊀算例1迭代过程中失效概率的变化情况Fig.2㊀Failure probability in the iteration process of example 1算例2:该算例包含交叉项二次多项式和线性多项式的二维问题,其不确定变量分布如表4所示,功能函数表达式为[28]g X ()=(x 1-x 2)210-x 1+x 22+52(30)㊀㊀表5中给出了不同可靠性方法求解算例2问题的结果,图3给出了在初始样本点相同的情况下,随着不断迭代增加样本点,三种方法计算得到失效概率的变化情况㊂由此可以看出,由于该算例中包含线性多项式,RBF 模型计算得到的失效概率相比于MCS 方法误差较大㊂RBF-LP 模型计算得到的结果相对准确,但两种模型的功能函数调用次数相当㊂相比于RBF 模型和RBF-LP 模型,RBF-SPCE 模型仅调用8次功能函数就达到稳定的计算结果,所得失效概率的相对误差也最小,仅为0.523%㊂表4㊀算例2不确定变量分布Tab.4㊀Distributions of uncertain variables for example 2变量Variable 均值Mean 标准差Standard deviation分布类型Distribution x 11正态分布Gaussian distributionx 201正态分布Gaussian distribution表5㊀不同可靠性方法求解算例2问题的对比Tab.5㊀Comparison of different reliability methods in example 2方法Method 失效概率Failure probability /%相对误差Relative error /%功能函数调用次数Number of performance functionRBF0.39805.42026RBF-LP0.42400.76025RBF-SPCE 0.42300.5238MCS0.4208图3㊀算例2迭代过程中失效概率的变化情况Fig.3㊀Failure probability in the iteration process of example 2算例3:该算例是一个包含线性多项式的七维可靠性分析问题,其不确定变量的分布如表6所示,功能函数为g X ()=x 2x 3x 4-x 23x 24x 5x 6x 7-x 1(31)㊀㊀表7中给出了不同可靠性方法在求解算例3问题的结果,图4给出了在初始样本点相同的情况下,随着不断迭代增加样本点,三种方法得到的失效概率的变化㊂由此可以看出,RBF㊁RBF-LP㊁RBF-SPCE 三种方法都在调用40次功能函数以后达到稳定,其中,RBF-SPCE 方法得到的失效概率与MCS 方法的相对误差最小,仅为1.128%㊂㊀1114㊀机㊀㊀械㊀㊀强㊀㊀度2023年㊀表6㊀算例3不确定变量分布Tab.6㊀Distributions of uncertain variables for example 3变量Variable 均值Mean 标准差Standard deviation分布类型Distribution x 10.010.003正态分布Gaussian distributionx 20.30.015正态分布Gaussian distributionx 336036正态分布Gaussian distributionx 4 2.26ˑ10-41.13ˑ10-5正态分布Gaussian distributionx 50.50.05正态分布Gaussian distributionx 60.120.006正态分布Gaussian distributionx 7406正态分布Gaussian distribution表7㊀不同可靠性方法求解算例3问题的对比Tab.7㊀Comparison of different reliability methods in example 3方法Method 失效概率Failure probability /%相对误差Relative error /%功能函数调用次数Number of performance functionRBF0.301010.65640RBF-LP0.36107.15340RBF-SPCE 0.33311.12840MCS0.3369图4㊀算例3迭代过程中失效概率的变化情况Fig.4㊀Failure probability in the iteration process of example 34㊀汽车侧面碰撞工程算例㊀㊀汽车抗撞击能力对于保证乘客的安全至关重要㊂在所有汽车交通事故中,侧面碰撞是导致乘客死亡的主要因素,仅次于正面碰撞㊂对于车身来说,车身两侧的机械性能相对较弱,汽车侧面碰撞的缓冲面积相对较小,其碰撞变形易对乘客造成严重伤害,针对汽车侧面碰撞问题[29]做可靠性分析具有重要意义㊂汽车侧面碰撞问题如图5所示[30]㊂针对汽车侧面碰撞问题,以B 柱处前门的速度作为性能函数,验证本文所提方法的工程适用性㊂表8给出了不确定变量的统计特性㊂汽车侧面碰撞功能函图5㊀汽车侧面碰撞Fig.5㊀Vehicle side impact数表达式为g X ()=0.489x 3x 7+0.843x 5x 6-0.0432x 9x 10+0.0556x 9x 11+0.000786x 211-0.75(32)表8㊀汽车碰撞问题不确定变量分布Tab.8㊀Distributions of uncertain variablesfor vehicle side impact变量描述Variable description变量Variable 均值Mean 标准差Standard deviation分布类型DistributionB 柱内侧B-pillar innerx 110.05正态分布Gaussian distribution B 柱加固件B-pillar reinforcementx 210.05正态分布Gaussian distribution地板侧面内侧Floor side innerx 310.05正态分布Gaussian distribution横梁Cross membersx 410.05正态分布Gaussian distribution车门防撞梁Door beamx 510.05正态分布Gaussian distribution门带加固件Door belt line reinforcementx 610.05正态分布Gaussian distribution车顶纵梁Roof railx 710.05正态分布Gaussian distributionB 柱内侧材料Material of B-pillar innerx 80.30.006正态分布Gaussian distribution地板侧面内侧材料Material of floor side innerx 90.30.006正态分布Gaussian distribution障碍高度Barrier heightx 10010正态分布Gaussian distribution撞击位置Barrier hitting positionx 11010正态分布Gaussian distribution表9中给出了RBF 模型㊁RBF-SPCE 模型以及MCS 方法在求解汽车侧面碰撞问题的结果,直接采用MCS 方法得到的失效概率为0.0107%㊂由表9可以㊀第45卷第5期赵子达等:径向基函数-稀疏多项式混沌展开混合代理模型可靠性分析方法1115㊀㊀看出,RBF方法在调用12次功能函数的情况下,失效概率为0.0140%,与MCS 方法的相对误差较大,为30.841%㊂而RBF-SPCE 模型在调用10次功能函数的情况下就达到稳定的结果,且计算得到的失效概率为0.0111%,相对误差3.738%远小于RBF 模型㊂图6给出了在初始样本点相同的情况下,随着不断迭代,增加样本点的失效概率变化情况㊂表9㊀不同可靠性方法求解汽车侧面碰撞问题的对比Tab.9㊀Comparison of different reliability methodsfor vehicle side impact方法Method 失效概率Failure probability /%相对误差Relative error /%功能函数调用次数Number of performance functionRBF0.014030.84112RBF-SPCE 0.01113.73810MCS0.0107图6㊀汽车侧面碰撞问题迭代过程中失效概率的变化情况Fig.6㊀Failure probability in the iteration process of vehicle side impact5㊀结论㊀㊀本文以RBF 与SPCE 展开的正交组合为基础,提出一种可有效解决结构可靠性分析问题的混合代理模型㊂1)该方法SPCE 展开增广到RBF 代理模型中,一定程度上弥补了RBF 拟合线性响应能力差的问题,将RBF 的局部拟合能力与SPCE 展开的全局拟合能力有机结合,在降低计算成本的同时提高了代理模型的预测精度㊂2)数值算例表明,与现有方法相比,本文所提方法在处理高维㊁强非线性问题时呈现出较高的计算效率和计算精度㊂3)汽车侧面碰撞的工程算例表明,本文所提方法可准确预测汽车侧面碰撞问题的失效概率,有效减少了有限元分析所需的样本点,表明本文方法具有良好的工程适用性㊂参考文献(References )[1]㊀OUYANG H,LIU J,HAN X,et al.Correlation propagation foruncertainty analysis of structures based on a non-probabilisticellipsoidal model[J].Applied Mathematical Modelling,2020(88):190-207.[2]㊀刘㊀俊,安子军.基于改进的响应面法的双激波套筒活齿传动接触疲劳强度模糊可靠性分析[J].机械强度,2020,42(6):1362-1368.LIU Jun,AN ZiJun.Fuzzy reliability analysis of contact fatiguestrength of double shock sleeve movable teeth transmission based onan improved RSM [J].Journal of Mechanical Strength,2020,42(6):1362-1368(In Chinese).[3]㊀OUYANG H,LIU J,HAN X,et al.Non-probabilistic uncertaininverse problem method considering correlations for structural parameter identification [J ].Structural and MultidisciplinaryOptimization,2021:1-16.[4]㊀白㊀斌,张俊一,周㊀策,等.基于T-S 模糊故障树的工业机器人可靠性分析[J].机械强度,2021,43(6):1348-1358.BAI Bin,ZHANG JunYi,ZHOU Ce,et al.Reliability analysis ofindustrial robot using T-S fuzzy fault tree[J].Journal of MechanicalStrength,2021,43(6):1348-1358(In Chinese).[5]㊀李永欣,常㊀涛,杨立明,等.基于组合代理模型的三角履带轮多工况疲劳优化[J].机械强度,2021,43(5):1088-1094.LI YongXin,CHANG Tao,YANG LiMing,et al.Fatigueoptimization of triangle track wheel under multi-working conditions based on ensemble of surrogate model [J].Journal of MechanicalStrength,2021,43(5):1088-1094(In Chinese).[6]㊀韩忠华.Kriging 模型及代理优化算法研究进展[J].航空学报,2016,37(11):3197-3225.HAN ZhongHua.Kriging surrogate model and its application todesign optimization:a review of recent progress [J ].ActaAeronautica et Astronautica Sinica,2016,37(11):3197-3225(InChinese).[7]㊀陈㊀哲,杨旭锋,程㊀鑫.基于改进Kriging 模型的主动学习可靠性分析方法[J].机械强度,2021,43(1):129-136.CHEN Zhe,YANG XuFeng,CHENG Xin.Active learning methodbased on improved Kriging model for reliability analysis[J].Journalof Mechanical Strength,2021,43(1):129-136(In Chinese).[8]㊀张天龙,曾㊀鹏,李天斌,等.基于主动学习径向基函数的边坡系统可靠度分析[J].岩土力学,2020,41(9):3098-3108.ZHANG TianLong,ZENG Peng,LI TianBin,et al.Systemreliability analyses of slopes based on active-learning radial basisfunction[J].Rock and Soil Mechanics,2020,41(9):3098-3108(In Chinese).[9]㊀刘㊀鑫,陈㊀德,周振华,等.基于概率-区间混合模型的汽车乘员约束系统可靠性优化设计[J].振动与冲击,2021,40(20):240-246.LIU Xin,CHEN De,ZHOU ZhenHua,et al.Reliability-baseddesign optimization for an occupant restraint system based on a probability and interval hybrid model[J].Journal of Vibration andShock,2021,40(20):240-246(In Chinese).[10]㊀FANG H B,HORSTEMEYER M F.Global response approximationwith radial basis functions[J].Engineering Optimization,2006,38(4):407-424.[11]㊀WEI Y,BAI G,SONG L K.A novel reliability analysis approachwith collaborative active learning strategy-based augmented RBF metamodel[J].IEEE ACCESS,2020(8):199603-199617.。