鼠笼式异步电动机原理
三相鼠笼式异步电动机正反转控制实验报告
三相鼠笼式异步电动机正反转控制实验一、设计的目的及要求根据已有的电路图连接电路,在实验台上连接电路,最终实现让电动机转起来的要求:1、掌握三相鼠笼式异步电动机正反转控制电路的工作原理、接线及操作方法。
2、掌握继电器控制系统中“互锁”、“自锁”的概念及线路结构。
3、学会分析、排除继电器劫持控制线路故障的方法。
4、要求电动机可以正反转,由电动机原理可知,若将接至电动机的三相电源进线中的任意两根相对调,即可使电动机正反转。
二、设计原理⑴电动机的旋转方向三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
⑵电动机正反转控制原理①控制线路三相异步电动机接触器联锁的正反转控制的电气原理图如下图所示。
线路中采用了两个接触器,即正转用的接触器KM1和反转用的接触器KM2,它们分别由正转按钮SB1和反转按钮SB2控制。
这两个接触器的主触头所接通的电源相序不同,KM1与KM2之间其中对调了两相的相序。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
②互锁原理接触器KM1和KM2的主触头决不允许同时闭合,否则造成两相电源短路事故。
为了保证一个接触器得电动作时,另一个接触器不能得电动作,以避免电源的相间短路,就在正转控制电路中串接了反转接触器KM2的常闭辅助触头,而在反转控制电路中串接了正转接触器KM1的常闭辅助触头。
当接触器KM1得电动作时,串在反转控制电路中的KM1的常闭触头分断,切断了反转控制电路,保证了KM1主触头闭合时,KM2的主触头不能闭合。
同样,当接触器KM2得电动作时, KM2的常闭触头分断,切断了正转控制电路,可靠地避免了两相电源短路事故的发生。
这种在一个接触器得电动作时,通过其常闭辅助触头使另一个接触器不能得电动作的作用叫联锁(或互锁)。
三相笼型异步电动机Y-△降压启动
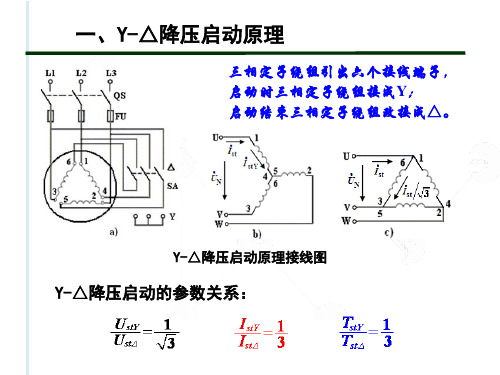
(3)若采用降压比k为0.64的自耦变压器降压启动,求启动 电流和启动转矩。
解:IN=PN/(√3UNηNcosφN) =40×103/(1.732×380×0.9×0.9)=75A 由于Ist/IN=6.5,所以Ist=IN×6.5=487.5A。 k为0.64时,启动电流Ist'=k2Ist=0.642×487.5=200A; 启动转矩Tst'=k2Tst=0.642×Tst=0.64×312=127.8N.m。
2)启动转矩仅为全压启动时的1/3,只适合于电动 机能空载或轻载启动的场合。 3)启动电压不能按实际需要调节,因而可能得不 到实际所需要的启动转矩。
应用: Y-△降压启动应用广泛。
容量在4kW及以上的Y系列三相笼型异步电动机,定子绕组额 定接线方式皆为△,具备采用Y-△降压启动的结构条件。
八、读图分析
八、读图分析
7. 若KM2和KM3同时得电,会怎样?
会造成三相电源短路。
自锁
8.请在图中标出自锁环节。
电气互锁
9.请在图中标出互锁环节, 并指明互锁类型。
10. KM1中文名称是什么?交流型还是直流型?判断依据呢?
接触器;交流型;它的主触头上流过的是交流电。
11.该电路有哪些保护措施?分别由哪些电器元件来实现?
M全压运行
五、两接触器控制的Y-△降压启动线路
注意事项:
KM2辅助常闭触头接于主电路中,由于辅助触头只允许通过 小电流,所以该线路只适用于功率较小( 4-13kW)的三相 笼型电动机的降压启动。
★两接触器控制的Y-△降压启动控制线路分析
合上QS 按下SB2
电动机介绍课件
专业词汇(抗磁性、顺磁性、电介质、磁力线、场); 试图确立电磁力与牛顿的万有引力之间的联系;
(麦克斯韦评价:科学家中最有成效最高尚的典型)
麦克斯韦方程组(The Maxwell's Equations)
直流电动机的发展(四阶段)
鼠笼式电动机与绕线式电动机的的比较:
鼠笼式: 结构简单、价格低廉、工作可靠;不能人为改
变电动机的机械特性。 绕线式:
结构复杂、价格较贵、维护工作量大;转子 外加电阻可人为改变电动机的机械特性。
三相异步电动机的工作原理
演示动画
/u28/v_MTA1NzU4NTA1.html
需要注意的是,并不是一个动车上只有一个电机。一个动车上有两个转 向架,一个转向架上常常安装有一台或两台电机。
以CRH3动车组为例,全车4个动车,每个动车有两个转向架,每个转向 架上有两台电机,全车共有16台电机,总功率达到8800千瓦。
坐在高铁上,这是不同的火车,从前的火车动力在车头上;现在,那个 带来高速的动力就在你的脚下。
作用: 产生旋转磁场
出线端子 铭牌数据 机座
定子绕组
定转子中间是空气隙。此外,还有端盖、轴承、机座、风扇、风罩等部件。
鼠笼型异步电动机主要部件拆分图
(2)定子绕组
作用:产生旋转磁场 材料:高强度漆包线(小型)
绝缘处理的铜条(大中型) 接法:星形或三角形(六个出线端)
转子
构成:由铁心和绕组两部分构成
1.以永磁体作为磁场的阶段
因天然磁极小,磁性弱,电机功率很小,动力也小。
2.以电磁铁作为磁极的阶段
1825年,英国,斯特金,制成了第一块电磁铁(用16个线圈导线绕制成的); 1829年,美国,亨利,制成可以举起1吨货物的电磁铁; 1834年,雅克比,采用电磁铁代替永久磁铁,并首次采用换向装置,大大改变了直流电机的性能。
电工实习报告--鼠笼式异步电动机的正反转控制
电工实习报告--鼠笼式异步电动机的正反转控制电工实习报告姓名:高雪珍班级:11自动化1班学号:2011551603指导老师:李辉鼠笼式异步电动机的正反转控制一、实验目的1(了解交流接触器、热继电器和按钮等几种常用控制电器的结构,并熟悉它们的联接方法。
2(通过实验操作,加深理解鼠笼式电动机直接启动控制线路的工作原理及各环节的作用。
3(了解复式按钮的结构、联接方法及其所起的作用,通过实验加深理解鼠笼式电动机正反转控制线路的工作原理,明确控制线路中两个接触器联锁的必要性。
4(了解行程开关的工作原理及其在控制电路中所起的作用,并用行程开关设计行程控制和自动循环控制。
二、实验仪器与设备1(三相交流电源一个2(三相鼠笼式异步电动机一台3(交流接触器两个4(热继电器一个(按钮三个 56(万用表一块三、预习要求1(了解三相异步电动机铭牌数据的意义。
2(了解几种常用控制电器的结构、用途和工作原理。
3(复习鼠笼式三相异步电动机直接启动控制电路的工作原理,并理解自锁及点动的概念,以及短路保护、过载保护和零压保护的概念。
4(复习三相鼠笼式异步电动机正反转控制线路的工作原理,弄清实现正反转时各控制元件动作过程。
为什么必须保证两个接触器不能同时工作,采取什么措施可以解决这一问题,5(复习行程开关和通电延时的时间继电器的工作原理,并独立设计行程控制和时间控制的实验控制线路图。
四、实验内容与步骤1. 三相鼠笼式异步电动机的直接起动控制图1 直接起动控制电路在切断电源的情况下,按图 1 接线。
通常先用粗线接好主电路,然后再用细线接控制电路,并且按“先接串联电路、后接并联电路”的方法进行接线。
要求在任一联接点上不超过两根导线,以保证接线的牢靠、安全。
线路接好后,仍按先主电路后控制电路的顺序依次检查。
对所接线路的检查核对也可用万用表在不带电的情况下,通过各触点闭合或断开时电路阻值的变化来判断,同学可按自行拟定的检查程序进行检查。
在确认所接线路正确无误后,便可通电进行控制操作。
三相鼠笼电机的点动自锁控制和正反转控制实验
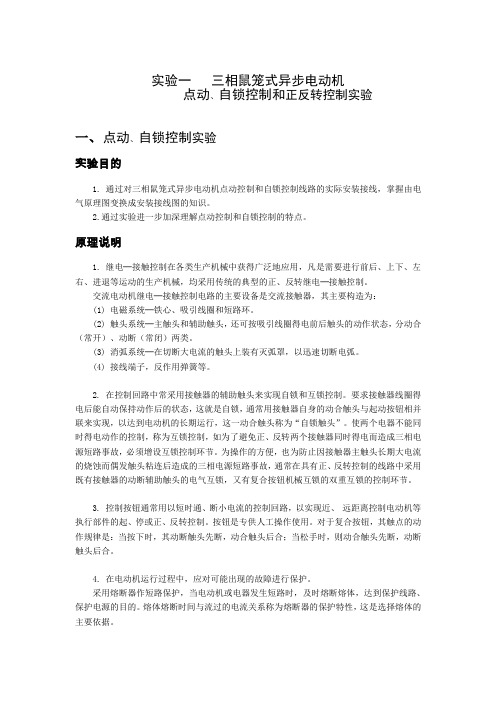
实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制实验一、点动、自锁控制实验实验目的1. 通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2.通过实验进一步加深理解点动控制和自锁控制的特点。
原理说明1. 继电─接触控制在各类生产机械中获得广泛地应用,凡是需要进行前后、上下、左右、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电前后触头的动作状态,分动合(常开)、动断(常闭)两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了避免正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的线路中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
3. 控制按钮通常用以短时通、断小电流的控制回路,以实现近、远距离控制电动机等执行部件的起、停或正、反转控制。
按钮是专供人工操作使用。
对于复合按钮,其触点的动作规律是:当按下时,其动断触头先断,动合触头后合;当松手时,则动合触头先断,动断触头后合。
4. 在电动机运行过程中,应对可能出现的故障进行保护。
采用熔断器作短路保护,当电动机或电器发生短路时,及时熔断熔体,达到保护线路、保护电源的目的。
三相鼠笼式异步电动机点动控制、自锁控制和正反转控制

实验一三相鼠笼式异步电动机点动、自锁控制和正反转控制一、实验目的1. 通过对三相鼠笼式异步电动机点动控制和自锁控制线路的实际安装接线,掌握由电气原理图变换成安装接线图的知识。
2. 通过对三相鼠笼式异步电动机正反转控制线路的安装接线,掌握由电气原理图接成实际操作电路的方法。
3. 加深对电气控制系统各种保护、点动控制、自锁、互锁等环节的理解。
4. 学会分析、排除继电--接触控制线路故障的方法。
二、原理说明1. 继电─接触控制在各类生产机械中获得广泛地应用,凡是需要进行前后、上下、左右、进退等运动的生产机械,均采用传统的典型的正、反转继电─接触控制。
交流电动机继电─接触控制电路的主要设备是交流接触器,其主要构造为:(1) 电磁系统─铁心、吸引线圈和短路环。
(2) 触头系统─主触头和辅助触头,还可按吸引线圈得电前后触头的动作状态,分动合(常开)、动断(常闭)两类。
(3) 消弧系统─在切断大电流的触头上装有灭弧罩,以迅速切断电弧。
(4) 接线端子,反作用弹簧等。
2. 在控制回路中常采用接触器的辅助触头来实现自锁和互锁控制。
(1)自锁。
要求接触器线圈得电后能自动保持动作后的状态,这就是自锁,通常用接触器自身的动合触头与起动按钮相并联来实现,以达到电动机的长期运行,这一动合触头称为“自锁触头”。
(2)互锁。
使两个电器不能同时得电动作的控制,称为互锁控制,如为了避免正、反转两个接触器同时得电而造成三相电源短路事故,必须增设互锁控制环节。
为操作的方便,也为防止因接触器主触头长期大电流的烧蚀而偶发触头粘连后造成的三相电源短路事故,通常在具有正、反转控制的线路中采用既有接触器的动断辅助触头的电气互锁,又有复合按钮机械互锁的双重互锁的控制环节。
○1电气互锁为了避免接触器KM1(正转)、KM2(反转)同时得电吸合造成三相电源短路,在KM1(KM2)线圈支路中串接有KM1(KM2)动断触头,它们保证了线路工作时KM1、KM2不会同时得电(如图30-1),以达到电气互锁目的。
三相异步电动机转子结构
三相异步电动机转子结构电动机是现代工业中最为重要的动力设备之一,而三相异步电动机是其中最为常见的一种。
它的稳定性、可靠性和效率都非常高,因此被广泛应用于各种工业领域。
在三相异步电动机中,转子是其最为核心的部分之一,它的结构和性能直接影响到整个电动机的工作效率和寿命。
本文将从三相异步电动机转子结构的角度,对其进行详细介绍和分析。
一、三相异步电动机的基本结构三相异步电动机是一种旋转电机,其基本结构包括定子和转子两部分。
其中,定子是不动的部分,通常由三个相位相互120度的绕组组成,每个绕组都被均匀地分布在定子的三个相位上。
当三相电源的电流通过定子绕组时,会产生一个旋转磁场,这个磁场的方向和大小都与电源的频率和电压有关。
而转子则是旋转的部分,它的运动是通过与定子旋转磁场的相互作用来实现的。
二、三相异步电动机转子的分类根据转子的不同结构和工作原理,三相异步电动机的转子可以分为两类:鼠笼式转子和绕线式转子。
其中,鼠笼式转子又分为平面型鼠笼转子和斜槽型鼠笼转子两种。
1. 鼠笼式转子鼠笼式转子是三相异步电动机中最为常见的转子结构之一,它的结构简单,制造成本低,因此被广泛应用于各种工业领域。
鼠笼式转子的主要构成部分是铜或铝制成的导体条,这些导体条被焊接或铸造在转子的铸铁芯中。
导体条通常呈现出“鼠笼”状,因此得名。
当定子绕组的旋转磁场通过转子时,会在导体条中产生感应电流,这些电流会产生磁场,与定子旋转磁场相互作用,从而使转子旋转起来。
2. 绕线式转子绕线式转子是另一种常见的三相异步电动机转子结构,其主要特点是采用了绕线来制成导体。
绕线式转子的绕线通常被绕成线圈,这些线圈被放置在转子的铁芯中。
当定子绕组的旋转磁场通过转子时,会在绕线中产生感应电流,这些电流会产生磁场,与定子旋转磁场相互作用,从而使转子旋转起来。
绕线式转子的制造成本相对较高,但其效率和性能通常比鼠笼式转子更好。
三、鼠笼式转子的结构和工作原理鼠笼式转子的结构和工作原理比较简单,其主要构成部分是铸铁芯和导体条。
异步电动机工作原理

异步电动机工作原理
异步电动机是一种基于电磁感应原理工作的电动机。
它由定子和转子组成。
定子是电机的固定部分,通常由三相绕组构成。
当三相交流电通过绕组时,会在定子内产生旋转磁场,其方向和大小与输入电流频率和幅值相关。
转子是电机的可旋转部分,通常由导体棒或铜套构成。
当定子中的磁场旋转时,磁场会穿透转子,并在转子中产生感应电流。
根据洛伦兹力原理,感应电流会在转子上产生一个与磁场方向垂直的力,从而驱动转子旋转。
异步电动机之所以称为“异步”,是因为转子的转速不会与定子的旋转磁场完全同步。
在理想情况下,转子的转速要低于磁场旋转速度的同步速度。
这是因为转子上的电流感应产生的力会使转子旋转,但转速低于同步速度是必要的,以保持转子与磁场之间的相对运动,从而产生转矩。
根据转子类型的不同,异步电动机可以分为鼠笼式异步电动机和绕线式异步电动机。
鼠笼式异步电动机转子由多个平行连接的导体棒构成,而绕线式异步电动机转子则由绕线构成。
两种类型的异步电动机在工作原理上有相似之处,但细节上有一些差别。
总结起来,异步电动机工作原理是依靠定子中的旋转磁场感应转子中的感应电流,并通过洛伦兹力驱动转子旋转。
这种转动
是异步的,即转子转速低于同步速度,以保持相对运动并产生转矩。
异步电动机由鼠笼式和绕线式两种类型,在细节上有所差别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鼠笼式异步电动机原理
鼠笼异步电动机是一种常见的三相电动机,其工作原理是利用电磁感应产生电动势,从而产生转矩实现机械能的转换。
鼠笼异步电动机由定子和转子组成。
定子上绕有三组对称的定子绕组,分别为A、B、C相。
在通电时,三个相序的交流电
流在定子内产生旋转磁场,并传递到转子上。
转子是由导体条(也称为鼠笼导体)组成的圆柱体,导体条的两端都与铁芯连接。
当定子产生的旋转磁场通过转子导体条时,由于导体条内存在感应电流,产生了一个与磁场方向相反的磁场,即将导体条拉向磁场方向。
但是由于导体条的两端与铁芯短路,感应电流在导体条内形成一个环形电流,被短路掉。
根据负载的大小,转子会产生不同的转速。
当负载大时,转子的转速慢,所产生的感应电场与旋转磁场之间有一定的差距,导致感应电流的频率降低,转子所受的转矩增大,以满足负载的需求。
当负载减小时,转子的转速增加,感应电场与旋转磁场之间的差距减小,导致感应电流的频率增加,转子所受的转矩降低。
由于转子上的鼠笼导体是固定的,所以鼠笼异步电动机无需外部给予转子电源,也无需刷子和电磁铁控制转子的转向。
因此,它具有结构简单、可靠性高、维护成本低等优点,广泛应用于工业和民用领域。