时差定位系统定位性能分析
三站时差定位GDOP影响因素分析
50
指挥信息系统与技术
2021 年 6 月
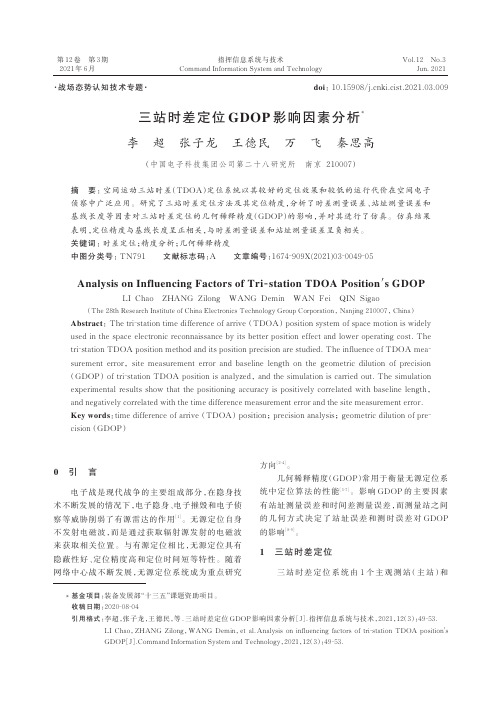
2 个 辅 观 测 站(辅 站)组 成 。 三 站 时 差 定 位 模 型 如 图 1 所 示 ,地 固 坐 标 系 中 ,主 站 位 置 为 S0 ( x0,y0,z0 ), 辅 站 1 位 置 为 S1 ( x1,y1,z1 ),辅 站 2 位 置 为 S2 ( x2,y2,z2 ),目标位置为 T ( x,y,z )。
图 三站时差定位模型 1
设目标发射的雷达探测波到达观测站的时间为 tTOA,tTOA0 为 雷 达 探 测 波 到 达 主 站 的 时 间 ,tTOA1 为 雷 达 探 测 波 到 达 辅 站 1 的 时 间 ,tTOA2 为 雷 达 探 测 波 到 达 辅 站 2 的 时 间 ,因 此 目 标 发 射 的 雷 达 探 测 波 到 达 主站与辅站 1 的时间差为 Δt1 = tTOA1 - tTOA0,到达主 站 与 辅 站 2 的 时 间 差 为 Δt2 = tTOA2 - t 。 TOA0 令 目 标 与观测站的距离如下:
éδ ê
2 ΔR
1
+
2δ2
0
0ù ú
êê 0 ê
δ2 ΔR2
+
2δ2
0úú ú
ë0
(3)
其 中 ,L、B 和 H 分 别 为 目 标 的 经 度 、纬 度 和 高 程 ;N
为 目 标 当 地 卯 酉 圈 半 径 ,随 纬 度 B 缓 慢 变 化 ;e 为 第
一偏心率 。 [10]
一 般 情 况 下 ,由 式(2)和 式(3)联 立 方 程 组 是 无
法 求 解 的 ,只 有 在 进 行 高 程 假 设 后 方 程 组 才 可 求
2 0z
一星两地时差定位方法性能分析

2021,36(3)电子信息对抗技术Electronic Information Warfare Technology㊀㊀中图分类号:TN971.1㊀㊀㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀㊀㊀文章编号:1674-2230(2021)03-0045-05收稿日期:2020-07-09;修回日期:2020-10-26作者简介:王玉林(1982 ),男,高级工程师,硕士,主要研究方向为通信对抗总体,无线电测向与无源定位㊂一星两地时差定位方法性能分析王玉林1,孙㊀哲2,陈建峰1(1.中国电子科技集团公司第54研究所,石家庄050081;2.海军驻邯郸地区军事代表室,河北邯郸056000)摘要:针对同轨多星定位系统以及高低轨联合定位系统需要卫星数量多的特点,设想地面站和卫星联合定位体制㊂考虑到时差定位体制对卫星运动不敏感的特征,提出一星三地和一星两地两种定位体制,从定位场景㊁定位原理㊁理论定位误差和误差分布四个方面对定位效能进行分析㊂重点论述一星两地时差定位误差的地理分布㊁时间分布以及受高度的影响,对将来的工程化应用提供支撑㊂关键词:时差定位;星地联合定位;一星三地;一星两地;误差分布DOI :10.3969/j.issn.1674-2230.2021.03.009A Performance Analysis of One -Star and Two Stations JointTDOA Location MethodWANG Yulin 1,SUN Zhe 2,CHEN Jianfeng 1(1.The 54th Research Institute of CETC,Shijiazhuang 050081,China;2.Naval Military Representative Office in Handan,Handan 056000,Hebei,China)Abstract :In view of the large number of satellites required for the co -orbit multi -satellite posi-tioning system and the high -low orbit joint positioning system,the joint positioning system of ground stations and satellites are envisaged.Taking into account the fact that the time difference positioning system is not sensitive to satellite motion,two time difference positioning systems which are one star /three stations and one star /two stations are proposed.The performance is an-alyzed from four aspects:location scene,location principle,theoretical location error and error distribution.The validity of the positioning model is proved by simulation,and the geographical distribution of the error is analyzed theoretically,which provides support for the future engineer-ing application.Key words :time difference location;joint satellite -ground positioning;one star /three stations;one star /two stations;distribution of the error1㊀引言基于卫星平台的无源定位技术具有覆盖范围广㊁定位精度高㊁工作频率范围宽和受地形影响小等诸多优势,在工程中得到广泛应用㊂文献[1]和文献[2]介绍了同步轨道双星对地面干扰源的时差/频差定位技术,文献[3]提出了高低轨联合定位设想㊂文献[4]和文献[5]针对多星定位体制展开讨论,分析了每种体制的解析或迭代算法以及定位误差的分布规律㊂多星定位体制要求多颗卫星有相同的极化方式,工作频段可同时覆盖目标频率,波束可同时覆盖待定位区域,选星条件较严苛㊂若无法满足多星定位条件,可引入地面站构成星地联合定位系统㊂星地联合定位方法,是指空间卫星和地面接54王玉林,孙㊀哲,陈建峰一星两地时差定位方法性能分析投稿邮箱:dzxxdkjs@收站联合组成空间上庞大的定位基线,融合了卫星接收大空域覆盖和地面高增益接收的特点,是多星定位选星困难时的一种代替手段㊂文献[6]提出了星地协同单边时差与测向交会定位模式,采用一星一地实现目标定位,适用于岛礁等阵地建设地形受限的场合㊂本文将重点关注多个观测站与卫星的联合侦察,定位体制采用时差定位,适用于沿海岸线部署的阵地㊂无源定位系统性能的全特征描述一般包括以下几个方面:第一是定位方程组的求解,包括解析求解㊁迭代求解㊁地理网格搜索等多种手段;第二是定位误差的理论推导,一般通过对定位方程组求偏导的方式,推算理论定位精度或克罗美劳界,综合考虑观测量测量误差㊁定位平台误差㊁接收设备时钟或晶振漂移引起的系统误差等因素;第三是定位误差的敏感要素分析,包括观测量误差㊁信号特征(载频㊁带宽㊁信噪比和数据长度等)㊁观测平台位置误差和速度误差㊁观测平台姿态误差㊁观测平台时钟或晶振漂移引起的系统误差㊁观测平台构型等等,结合当前的误差水平,分析误差最敏感的因素,并在设计阶段制定相应的对策,比如同步轨道双星定位体制,定位误差对卫星速度误差最敏感,工程中引入了星历校准技术;第四是定位误差的分布特征,包括地理分布和时间分布,并引出不可定位区域㊁最佳定位区域㊁不可定位时段和最佳定位时段,进而指导定位系统在最有利的情况下开展工作㊂涉及到卫星平台的定位系统需要考虑卫星资源调度㊁上行下行信号接收匹配㊁大量数据传输等许多工程问题,本文将针对星地联合双时差定位系统的设备配置关系,建立理论模型,并进一步分析定位性能从而为工程实现提供参考㊂以时差定位体制为例,根据地面站数量可分为一星三地和一星两地两种时差定位体制,针对每种定位体制,本文将从定位场景㊁定位原理㊁理论定位误差和误差分布四个方面对星地联合时差定位体制展开论述㊂2㊀一星三地时差定位2.1㊀定位场景一星三地时差定位场景如图1所示,一星指一颗高轨卫星,三地指地面站1㊁地面站2和地面站3㊂其中,地面站1㊁地面站2和地面站3接收目标辐射源旁瓣辐射信号,地面站4是高轨卫星下行信号的地面接收站,不参与定位解算㊂目标辐射源装载于机载运动平台,处于地面站1㊁地面站2㊁地面站3和高轨卫星的通视范围内㊂一星三地时差定位系统的优势体现在扩展了三站时差定位系统的作用距离㊂当辐射源距离地面站1㊁地面站2和地面站3较远时,3站侦收到的信号较弱,时差测量误差较大,定位误差也偏大㊂地面站4接收高轨卫星转发的目标辐射源信号,通过主瓣辐射和大口径天线侦收获得高信噪比信号,可作为目标信号检测和时差测量的基准,并提高检测概率和定位精度㊂图1㊀一星三地时差定位场景图2.2㊀定位原理如图1所示,选地心地固坐标系,信号从目标辐射源发出,存在四条路径,对空路径到达卫星并向下转发到地面站4,对地路径到达3个地面站㊂目标辐射源信号到达地面站1㊁地面站2和地面站3的传输距离分别记为l1㊁l2㊁l3,目标辐射源信号到达地面站4的传输距离记为l4+l m4㊂其中l4表示目标辐射源信号到卫星的传输距离,l m4表示卫星下行信号到地面站4的传输距离㊂地面站1㊁地面站2㊁地面站3和地面站4采集到的数据打上时标,统一传送至后端数据处理中心,经过检测㊁配对实现参数测量,从各地面站到后端处理中心的传输时延在匹配过程中被自动消除㊂地面站1㊁地面站2和地面站3相对于地面站4的时差测量值分别为:DTO14=l1-l4-l m4()/v c(1)64电子信息对抗技术·第36卷2021年5月第3期王玉林,孙㊀哲,陈建峰一星两地时差定位方法性能分析DTO24=l2-l4-l m4()/v c(2)DTO34=l3-l4-l m4()/v c(3)其中v c表示光速㊂差分时差可表示为:DTO24-DTO14=l2-l1()/v c(4)DTO34-DTO14=l3-l1()/v c(5)其中l2-l1()/v c㊁l3-l1()/v c是目标辐射源相对于地面站1㊁地面站2和地面站3的时差,其中地面站1为主站㊂通过时差差分处理消除了从目标辐射源通过卫星到达地面站4的路径时延,定位解算过程不需要卫星星历和卫星转发器的转发时延,需借助卫星的转发通道,易于工程实现㊂通过以上分析可知,一星三地时差定位体制具有如下特点:a)接收卫星转发的下行目标辐射源信号,获得高信噪比的基准信号,增加对辐射源目标的检测概率㊁提高了时差测量精度和时差定位精度;b)通过时差双差处理抵消了卫星转发处理延时,卫星位置不参与定位解算,实现复杂度低;c)定位误差的地理分布特征由地面3站的位置布局决定,与选取卫星的轨道位置无关㊂误差分布规律与常规三站时差定位相同㊂d)未涉及参考站㊂3㊀一星两地时差定位3.1㊀定位场景一星两地时差定位场景如图2所示,一星指一颗高轨卫星,两地指地面站1和地面站2㊂地面需配置四个地面站,其中地面站1接收目标辐射源旁瓣辐射信号㊁地面站2接收目标辐射源旁瓣辐射信号及参考信号,地面站3接收卫星转发的下行目标辐射源信号,参考站向卫星和地面站1发射参考信号㊂其中目标辐射源装载于机载运动平台,且处于地面站1㊁地面站2和高轨卫星的通视范围内㊂引入参考站的目的是消除卫星转发器产生的处理延时㊂一星两地时差定位主要应用在以下场合: a)地面三站因地形地貌限制无三站共视区,只有两站共视的场合;b)目标辐射源到某站距离较大接收功率低,导致三站无法同时检测发现目标,只有两站可发现目标的场合㊂地面三站时差定位系统要求三站同时检测到目标方可进行时差定位解算,若其中一个站故障或检测不到目标信号,会导致三站不成系统和侦察站点资源浪费,引入卫星资源构成一星两地定位布局,可提高侦察站点的资源利用率,提高装备作战效能㊂图2㊀一星两地时差定位场景图3.2㊀定位原理如图2所示,选地心地固坐标系,目标辐射源信号到达地面站1和地面站2的传输路径记为l1和l2,目标辐射源信号到达地面站3的传输路径记为l3+l3m㊂参考站信号到达地面站1的传输路径记为l1r,参考站信号到达地面站3的传输路径记为l r+l3m㊂目标辐射源信号到达地面站2和地面站3的时差为:DTO23(unk)=l2-l3-l3m()/v c(6)目标辐射源信号到达地面站1和地面站3的时差为:DTO13(unk)=l1-l3-l3m()/v c(7)卫星和地面站3位置参数已知,时差观测量进一步可转换为:l2-l3()/v c=DTO23(unk)+l3m/v c(8)l1-l3()/v c=DTO13(unk)+l3m/v c(9)高轨卫星作为主站,地面站1和地面站2作为辅站,形成三站时差定位布局,时差测量值即式(8)和式(9)㊂目标辐射源信号到达地面站3的传输路径经过了卫星转发,存在卫星处理延时,因此引入参考74王玉林,孙㊀哲,陈建峰一星两地时差定位方法性能分析投稿邮箱:dzxxdkjs@站以消除系统误差㊂参考站信号分两条路径,一条是地面路径由地面站1接收,一条是地天路径通过卫星转发被地面站3接收,两条路径的长度分别为l1r和l r+l3m㊂参考站信号到达地面站1和地面站3的时差可表示为:DTO(ref)=l1r-l r-l3m()/v c(10)式(10)与式(6)㊁式(7)相减,得到差分时差: DTO13(unk)-DTO(ref)=l1-l3-l3m()/v c-l1r-l r-l3m()/v c=l1-l3+l r-l1r()/v c(11) DTO23(unk)-DTO(ref)=l2-l3-l3m()/v c-l1r-l r-l3m()/v c=l2-l3+l r-l1r()/v c(12)差分时差抵消了卫星传输路径,消除了卫星处理延时㊂于是,高轨卫星作为主站,地面站1和地面站2作为辅站,时差观测量进一步转换为: l1-l3()/v c=DTO13(unk)-DTO(ref)-l r-l1r()/v c(13) l2-l3()/v c=DTO23(unk)-DTO(ref)-l r-l1r()/v c(14)涉及到的测量量包括DTO13(unk),DTO23 (unk)和DTO(ref)㊂卫星与地面站1和地面站2构成一个庞大的三角形布局,因此可实现高精度的时差定位㊂将卫星位置㊁地面站1和地面站2的位置及时差测量误差带入三站时差定位理论定位误差公式即可获得一星两地时差理论定位误差分布公式㊂3.3㊀误差分布3.3.1㊀定位误差地理分布设定高轨卫星大地坐标为(122.88ʎE,27.38ʎN,25000km),地面站1的大地坐标为(121.8ʎE, 29.4ʎN,500m),地面站2的大地坐标为(121.5ʎ, 28.5ʎ,500m),地面站3的大地坐标为(121.7ʎ, 30.8ʎ,60m),参考站大地坐标为(121.7ʎ,28.8ʎ, 500m),时差测量误差500ns,卫星位置误差1km,地面站及参考站位置误差1m㊂在STK中模拟卫星运行轨迹,并标记地面站及卫星星下点位置,如图3所示㊂考察距离参考站500km以内区域,定位误差分布如图3所示㊂其中圆形表示地面站,菱形表示参考站,星形表示卫星星下点㊂图3㊀一星两地各站部署示意图观察图4可知,在当前卫星㊁参考站及地面站位置配置下,一星两地时差定位体制的定位误差地理分布具有如下特点:a)在地面站1和地面站2连线及延长线附近定位误差偏大甚至不可定位;b)定位误差分布相对于地面站1和地面站2连线连线近似成线性对称分布;c)目标距离地面站越远,定位误差越大㊂图4㊀一星两地时差定位误差分布(单位:km) 3.3.2㊀定位误差时间分布选取非同步卫星参与定位解算时,卫星位置随时间发生变化,一星两地通视区域和几何构型随之发生改变,地面站1㊁地面站2㊁地面站3和参考站位置与3.3.1节相同,设定辐射源大地坐标为(122.6ʎE,28.92ʎN,8000m),卫星沿图3航迹从右下角飞行到右上角,每1分钟取一次卫星位84电子信息对抗技术㊃第36卷2021年5月第3期王玉林,孙㊀哲,陈建峰一星两地时差定位方法性能分析置,共40分钟,考察对固定目标定位的误差变化规律,如图5所示㊂图5㊀定位误差随时间的变化观察图5可知,当卫星飞跃地面双站共视区域时,一星两地时差定位方法对目标定位的误差随卫星位置的变化很小,说明在文中设定的仿真条件下,定位误差具有近似非时变特征㊂从原理上分析,当卫星从图3航迹从右下角飞行到右上角的过程中,一星两地形成的定位三角形仅发生了细微的变化,卫星相对于双站的张角维持在0.24ʎ左右,卫星到双站的距离变化未超过50km,相对于卫星高度25000变化只有千分之二,因此卫星位置变化对定位误差只产生很小的影响㊂3.3.3㊀定位误差随卫星高度的变化进一步通过仿真验证卫星位置不变高度变化对定位误差的影响,设定辐射源大地坐标为(126.2ʎE,29.0ʎN,8000m),卫星大地坐标为(122.8ʎE,28.385ʎN),卫星高度从500km 变化到25000km,对辐射源的定位误差随卫星高度的变化趋势如图6所示㊂图6㊀定位误差随卫星高度的变化观察图6可知,随着卫星高度升高,定位误差逐渐减小;当卫星高度在5000km 以上时,定位误差降低的趋势明显减缓,也说明对定位差对高度不敏感;当卫星高度低于2000km 时,定位误差随高度升高迅速降低㊂因此工程实现时,建议选择5000km 高度以上的卫星参与定位,且高度的进一步提升对定位效能的改善并不明显㊂4 结束语㊀㊀文章从定位场景㊁定位原理㊁理论定位误差和误差分布四个方面对两种定位方法的性能进行了初步分析㊂其中一星三地时差定位是对三站时差定位系统效能的增强和扩展,适用于高精度监视重点目标;一星两地时差定位系统适用于三站不通视或单定位站损坏的情况,通过引入空间卫星和地面站形成超长基线,可提高侦察站作战效率,定位误差分布具有地理分布线性对称㊁近似非时变和对卫星高度不敏感的特征㊂分析结果可支撑后续卫星定位方向的立项论证和过程实现㊂参考文献:[1]㊀WANG G,LI Y,ANSARI N.A Semidefinite Relaxa-tion Method for Source Localization Using TDOA and FDOA Measurements[J].IEEE Trans on Veh Tech-nology,2013,62(2):853-862.[2]㊀张威,马宏,吴涛,等.一种基于泰勒级数展开的卫星FDOA 地面干扰源定位算法[J].无线电通信技术,2019,45(4):385-390.[3]㊀郑仕力,董乔忠.基于高低轨联合的空中目标三维定位侦察技术[J].航天电子对抗,2018,34(2):25-28.[4]㊀任凯强,孙正波.三星时差定位系统的有源校正算法[J].宇航学报,2018,39(3):327-330.[5]㊀秦耀璐,杨淑萍,束锋,等.基于TDOA /FDOA 多星联合定位误差与卫星构型分析[J].电波科学学报,2018,33(5):566-570.[6]㊀李高云,李斌,陈亮,等.低约束条件下星地协同侦察定位[J].电子信息对抗技术,2019,34(1):1-4,18.[7]㊀李立峰,江漫,陈兵.单星卫星通信终端定位技术研究[J].无线电通信技术,2017,43(4):71-74.[8]㊀吴耀云,游屈波,哈章.双星系统对雷达无源定位的可行性分析[J].电子信息对抗技术,2011,26(3):1-5.[9]㊀王奉帅,刘聪锋.迭代最小二乘卫星定位算法[J].无线电通信技术,2018,44(4):339-342.[10]㊀郭连华,郭福成,李金洲.一种多标校源的高轨伴星时差频差定位算法[J].宇航学报,2012,33(10):1408-1411.94。
多站无源时差定位精度分析

多站无源时差定位精度分析邢翠柳;陈建民【摘要】针对在多站无源时差定位系统中影响目标定位精度的因素,分析了时差测量误差和站址误差对目标定位精度的影响。
影响时差测量精度的因素有接收机热噪声、多普勒效应、站间同步误差、本地时钟误差和大气等因素。
通过分析各个因素对目标定位精度的影响程度,在特定布站方式下,仿真计算得到在固定时差测量误差和站址误差下可能达到的目标定位精度,并根据主要误差来源提出相应的提高定位精度的措施。
%Aiming at the factors which affect on the positioning accuracy of TDOA passive location by multi-station,this paper analyzes the influence on target positioning accuracy by error in time difference measurement and station locations.The influence factors on time measurement accuracy include Johnson noise of receiver,Doppler effect,error on time synchronization between stations,local clockerror,influence by atmosphere and so on.The positioning accuracy is got in special station location with error in time difference measurement and station location by simulation.The methods of improving the accuracy of positioning accuracy are given.【期刊名称】《无线电工程》【年(卷),期】2012(042)002【总页数】4页(P32-34,48)【关键词】时差定位;定位精度;时差测量误差;站址误差【作者】邢翠柳;陈建民【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081;中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TP960 引言多站无源时差定位(TDOA)又称为双曲线定位,是一种重要的无源定位方式,是通过处理3个或更多观测站采集到的信号到达时间测量数据对辐射源进行定位的。
四星时差定位精度分析

=
过 系统 修正 之后 , 测量 误差 的均值 为零 , 而且 卫 星位 置 误 差每 个元 素之 间 以及 各 卫 星 位 置误 差 之 间不 相关 ,
则 目标 辐射 源定 位误 差 的协方 差矩 阵为
P = E{ d ・ d }= 曰{ E[ d y・ d l , ]+
C: A
布站条 件 下 的 G D O P分 布 , 来 更 合 理地 分 配 各 个 卫 星
的位 置 。
3 定 位 精 度 分 析
仿 真 1 在各 星位 置误 差 为 5 1 1 3 . 、 各个 时差 测量 精
度为 1 0 n s的 条 件 下 , 对 卫 星 呈 Y型 分 布 、 正 方 型 分 布、 倒 T型分 布和 菱形 分布 做精 度仿 真 , 研 究 卫星 不 同
差 测量 误差 的大小 有关 , 在实 际情 况 中 , 就能 利 用不 同
=
=
^ =
l ’ 2 , 3 。令
: [ I L C c 2 三 3 x 三 一 — 一 C c O 兰 0 x q C 2 3 y 三 — 一 — C O y c C 2 3 1 z 三 。 C 0 o O 2 z ] j I , d X 垒 [ l L 誊 d y z ] J I , d Y 垒 [ ; 兰 ; ] , d 垒 [ 耋 ] , 垒 [ 兰 三 三 ] , 。 垒
分 布下 的定 位误 差 , 各 星的坐 标如 表 1 所示。
[ 莒 ] , 垒 [ 虽 弓 ] , 垒 [ 曼 三 ] 。
W WW . di a nz i ke j i .o r g
2 5
陈玮 , 等: 差 分 投 影 快 速 定 向 图像 插 值 算 法 的优 化
同步卫星无源测轨中的时差定位与精度分析

同步卫星无源测轨中的时差定位与精度分析彭华峰;曹金坤;郑超【摘要】Positioning based on time-delay measurement is one of the most important positioning method. The issue is focused on its usage on geosynchronous earth orbit satellite(GEO) measurement and determination. The principles, algorithm and diagram of positioning with four stations are presented. The equation of error's transmission is derived here. The importance is the error analysis of how the position precision is affected by the measurement precision, the layout pattern of four stations, the length of the baseline, the precision of station's position and so on. Monte-Carlo simulation is achieved on computer which is coincident with the result of the error analysis. The simulation result indicates that all the measurement precision, the layout pattern of four stations, the length of the baseline and the precision of station's position are the key factors of the position precision; the layout like an inverse Y form is the best one, and a rectangle or diamond form is the worst layout form which is not suggested to be used in positioning system. In order to get precision with order of kilometer, the baseline is suggested to be larger than 1 000 km. It is more better if even more larger; the precision of station's position must be better than 1 m.%多站时差定位是最重要的无源定位方法之一.研究了基于四站时差测量的地球同步卫星无源定位和定轨方法.介绍了四站时差定位的基本原理,给出了四站时差定位算法和详细算法流程,推导了四站时差定位精度的误差传播方程.重点分析了测量精度、布站方式、基线长度、站址误差对同步卫星定位精度的影响.通过Monte Carlo仿真,验证了四站时差定位算法与误差分析结果的一致性.仿真结果表明:测量误差、布站方式、基线长度和站址误差均是定位误差的关键影响因素;布站方式以倒Y型布站效果最佳,菱形或矩形布站方式存在奇异区;为达到km量级定位精度,则基线长度应大于1 000 km;采用四站时差测轨时,站址坐标精度水平应优于1 m.【期刊名称】《系统工程与电子技术》【年(卷),期】2012(034)011【总页数】7页(P2219-2225)【关键词】无源测轨;时差;精度分析;同步卫星【作者】彭华峰;曹金坤;郑超【作者单位】西南电子电信技术研究所,四川成都610041;西南电子电信技术研究所,四川成都610041;西南电子电信技术研究所,四川成都610041【正文语种】中文【中图分类】P2880 引言无源时/频差定位是无源定位的热点技术之一[1-6],具有定位精度高、隐蔽性好、作用距离远等优点,对于提高系统的生存能力具有重要的作用。
室内定位技术的性能评估与选择指南

室内定位技术的性能评估与选择指南室内定位技术近年来得到了快速发展,广泛应用于各种场景,如购物中心、医院、办公室等。
它为用户提供了在封闭环境中精确定位和导航的能力,为商家提供了更好的运营和管理手段。
然而,由于不同室内定位技术的原理和性能差异,我们在选择合适的室内定位技术时需要进行性能评估并做出正确的选择。
本文将介绍室内定位技术的性能评估指标及其选择指南。
一、基本原理室内定位技术一般基于以下原理进行定位:1. 信号强度测量:利用Wi-Fi、蓝牙或RFID等无线通信技术,通过测量信号的强度来估计设备与基站的距离。
2. 时间差测量:使用超宽带(UWB)或声音传感器,通过计算信号传播的时间差来确定设备与基站之间的距离。
3. 地磁测量:通过检测地磁场的变化来定位设备,适用于室内环境中没有显著可用的基站情况。
二、性能评估指标在选择室内定位技术时,需要考虑以下性能评估指标:1. 定位准确度:即定位结果与真实位置之间的误差。
通常使用平均误差距离(Mean Error Distance)来评估,较小的数值表示更准确的定位。
2. 定位精度:指定位误差的标准偏差,表示定位结果的稳定性。
通常使用Root Mean Square Error (RMSE)来评估,较小的数值表示更高的精度。
3. 非唯一性:指定位系统不能准确获得唯一解的能力。
如果一个定位系统在某些情况下产生多个可能的结果,则具有较高的非唯一性。
4. 定位时间:指定位系统从用户发起定位请求到获取有效定位结果的时间。
较短的定位时间对于实时定位应用很重要。
5. 耗电量:指定位系统对设备电池的能耗情况。
较低的耗电量能延长设备的续航时间。
6. 可扩展性:指定位系统能否支持大规模的用户和设备,以及适应复杂的室内环境。
较好的可扩展性使得定位系统更具应用潜力。
7. 异常处理能力:指定位系统对于干扰和误差的容忍度。
较强的异常处理能力意味着定位系统能够在复杂和多变的环境下保持良好的定位性能。
基于外辐射源信号的时差定位系统定位精度分析
关 键 词 : 辐 射 源 信 号 ;无 源 定 位 ;精 度 分 析 外 中图分类 号 : 7 TN 9 1 文 献 标 志码 :A D I 1 . 9 9 is . 【 15 6 2 1 . . 1 O : 0 3 6 /.s n 1) - 0 X. 0 0 ¨ 0 0
空间四站时差定位算法及其性能分析
t n t o rs a esain n ef l wih f u p c tto sa d p r ̄ u YANG i Je
Ab ta t F rt ep o lm fTD0 A o ain wih fu tto s ie tlc to o u in ag - sr c : o h r be o le to t o rsain ,adr c o ain s lto lo rt m sp o o e . I is x r s e h a g tc o dn tsa h a ia a g q a in ea ie ih i r p s d tf te p e s st et r e o r ia e st e rd c l n ee u to srltv r r t h eee c tto o t er fr n es ain,a dt e ov st ee u t n og tt er dc l a g .S h s i ain n h n s l e h q a i st e h a ia n e ot ee t to o r m
=
故 有
r+ T o= 2 o zr , r + l
因此有
( r + △ {△r 2o r ) i—
Ex一 ( i 2 z + o]I 一 ) ) (0 + z
+ 鞫, n z r o l
将该式带入式() r 的表达式, 1中 o 可得
( + r - y ) + ( + r 一 ) 2 2 o 0 3 3 o ,
( n e f rne RD , Rag f ec, ) 到达两 个接 收站 的距 离差 Die 为 常数 的 可能 目标位 置 为 一 条 双 曲线 ( 双 曲 面 ) 或 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3时差定位克拉美罗界
3.1定位克拉美罗界
根据统计信号估计理论,无偏估计量的方 差存在理论下界,常用克拉美罗下限
(Cramer-Rao Low Bound. CRLB )表示 在没有新的信息量引入时,目标的定位精度无 ・46・
CRLB(Q) = J7 =——_—V (5) „ 5-lnp(z 0) 匕 \ --------s一一〉
能出现定位虚假点,此时需要通过增加观测站
数目或者借助如测向、高度等辅助信息来予以 排除〔⑷。
为更直观说明时差定位原理,下面以二维
平面内基于时差体制的目标定位进行简单说明。
假设辐射源位置坐标为u=比,坯]厂,三个接收
站的位置坐标分别为s,=[兀,》丁,i = 1.2,3。辐
射源u与接收站s,之间的距离为:
关键词:时差;走位;克拉美罗界;布站
1引言
无源定位技术由于具有作用距离远、隐蔽 接收、不易被对方发觉的优点,使得它在辐射 源态势快速感知、电子干扰引导、雷达探测引 导、火力打击引导等方面扮演着不可或缺的角 色〔山]。在非合作目标无源定位场合,由于缺乏 关于目标信号发射时间的相关信息,则无法通 过到达时间(Time of Arrival, TOA)来实现辐 射源与接收站之间的距离量测⑴,只能够通过 测量目标信号到达各个空域分置的接收站的角 度信息⑸、站与站之间目标信号到达时间差
=HU-SJI
(0
不失一般性,以接收站即为参考,则时差
测量方程为:
=(||u-s』-||u-s』)/c,i = 2,3
(2)
式中時表示第i个观测站S,与第1个观测站外 之间的目标信号到达时间差测量值 ,C为信号 传播速度。从式(2)可以看出,此时具备两个时 差值,对应二维平面内的两条双曲线。对此,
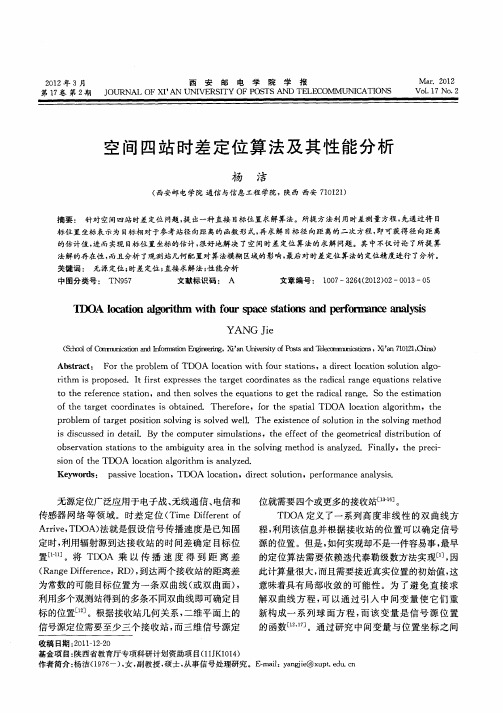
按照表1中的目标与接收站位置坐标,可以得 到图1所示的时差定位原理图,目标即位于两 条双曲线交点处。
责任编辑:田筱
本文针对目标时差定位性能问题,首先建 立时差定位方程,然后根据克拉美罗界定义, 推导了时差条件下的定位下限,接着通过分析 时差定位克拉美罗界表达式,推导了目标定位 精度与时差量测误差、时差量测信息维度、单 一时差量测精度的关系,得出了随着整体量测 误差的减小、可用时差的维度、单一维度时差 估计质量的提高,目标定位精度均可以得到改 善提高的结论,并进一步根据目标分布与观测 站的几何关系,给出了目标定位精度随目标分 布的基本特性,最后通过仿真证明了所提推论 的正确性。
表I目标与传感器位置矢量
序号i 0 1 2
3
兀(m)
100 -100 100 100
”(m) 150 0 0 200
300
250
200
150
亘100
50
0
-50
-100
-150
-100
-50
0
50
100
150
200
250
x(m)
图I时差定位原理图 法超越理论下界,且往往将算法逼近这一下限 的程度作为评价各种算法好坏的一个标准。
阶可导时,估计值6的均方误差能够达到的下 限为Fisher信息矩阵的逆矩阵,Байду номын сангаас:
其中J为Fisher信息矩阵,其表达式为:
3 = E\ Slnp(z|0)
\
=
-E\
d2
In /?(z|0)
ao;
(4)
式中 £[(0-0)2]>J '表示 £[(e-0)2]-J-'为半正 定矩阵。则定位克拉美罗界可以表示为:
• 45 •
总第405期
电信技术研究 RESEARCH ON TELECOMMUNICATION TECHNOLOGY
2019年第1期
时差值确定的是以两个观测站为焦点的双曲面,
则利用时差值需要四站才能够在三维空间中完
成对目标的定位。
实际当中,不论是二维目标还是三维目标,
双曲线或者双曲面的交点往往不止一个,即可
综述:时差定位系统定位性能分析
时差定位系统定位性能分析
邓兵翁手诚赵培炭
摘 要:作为一种广泛应用的无源定位手段,时差定位技术受到众多学者的广泛关 注。本文针对时差老位系统的基本定位性能开展研究,通过推导目标屯位误差克拉美罗 界,推导了目标定位精度与时差量测误差、时差量测信息维度、提高单一时差量测精度 的关系,并进一步推导了目标定位误差相对观测站的几何分布关系 ,最后通过计算机仿 真证明了所提推论的正确性,为实际工程提供一定的理论参考。
实际当中,由于信道不稳定性、参数估计 方法的渐进无偏性等的存在,TDOA参数估计 值存在误差,假设待估计参数为0 , z=匕,召,...工”]『为观测矢量,其概率密度函数
(Probability Density Function, PDF)为 p(z|O)。
若6为o的无偏估计,且/?(z|0)关于o —阶和二
(Time Difference of Arrival. TDOA )⑷等信 息来实现对目标状态的估计。
TDOA定位技术利用多个已知位置的观测 站接收目标信号,通过求解不同观测接收站之 间辐射源到达信号时间差所组成的定位方程组 来获得目标位置信息⑺。基于多站时差测量的 定位技术由于其组成结构简单、定位成本低、 精度较高、对目标发射信号的强度、频率信息 等不需要精确己知等优点,受到越来越多的关 注W
2时差定位原理
时差定位也称为双曲线定位或反“罗兰”定 位〔7】,主要是通过空间分置的多个传感器测量 目标辐射源信号到达不同传感器的时间差信息 来估计目标的状态,包括目标的位置、速度、 距离、方位等信息。根据几何原理,在二维平 面内,到达两个定点距离差为常数的动曲线为 以该两点为焦点的双曲线,则在二维平面内利 用三个观测站可以得到两组时差值,即有两条 经过目标辐射源的双曲线,目标位于两条双曲 线的交点固。以此类推,在三维空间中,一组
根据以上理论,可以得岀时差TDOA定位 时的克拉美罗界表达式。
3.2时差定位克拉美罗界推导
综述:时差定位系统定位性能分析
假设辐射源位置坐标为u=[.r,y,z]\接收 站的位置坐标为 S; =[x,,^,,z,]r , i = l,2,...,m , m 为观测接收站数目,且/h>3o根据时差定位方 程(2),時=(||u-s』-||u-s』)/c ,方程两边同时 乘以信号传播速度c ,则可以得到目标到第i个 传感器和第1个传感器之间的距离差(Range Difference of Arrival, RDOA):