激光雷达工作原理及应用
激光雷达的工作原理与信号处理
激光雷达的工作原理与信号处理激光雷达(Light Detection and Ranging,简称LiDAR)是一种利用激光束探测目标并测量其距离、速度和方向等信息的技术。
它在自动驾驶、环境监测、地图绘制等领域得到广泛应用。
本文将探讨激光雷达的工作原理以及信号处理方面的内容。
一、激光雷达的工作原理激光雷达通过发射一束窄束激光,然后测量激光束被目标物体反射后返回的时间和强度,从而实现测量目标物体的距离和形状等信息。
其工作原理可以分为激光发射、目标反射和激光接收三个过程。
1. 激光发射:激光雷达通过激光发射器发射一束激光束。
一般而言,激光雷达会采用红外激光作为发射光源,因为红外激光有较好的穿透能力和抗干扰性。
2. 目标反射:激光束照射到目标物体上后,会被目标反射回来。
目标物体的形状、颜色和表面材质等因素会影响激光的反射情况。
3. 激光接收:激光雷达接收到目标反射回来的激光束,并通过接收器将激光信号转换为电信号进行处理。
接收器通常包括光电二极管和放大器等组件,用于接收和放大反射信号。
二、激光雷达信号处理激光雷达通过对接收到的激光信号进行处理,可以获得目标物体的距离、速度和方向等信息。
信号处理在激光雷达系统中起着重要的作用,是激光雷达工作的关键环节。
1. 距离测量:利用激光束的发射和接收时间差,可以计算出目标物体与激光雷达之间的距离。
一般来说,激光雷达系统会使用飞行时间(Time of Flight)或相位差测量法(Phase Shift)来实现精确的距离测量。
2. 速度测量:通过分析接收到的激光信号的频率变化,可以获得目标物体的速度信息。
激光雷达通常采用多普勒效应来实现速度测量,即利用光频移变化进行速度测量。
3. 方向测量:利用激光雷达的扫描方式,即通过旋转或扫描来覆盖整个空间,可以获得目标物体的方向信息。
通常情况下,激光雷达会采用机械扫描或电子扫描的方式进行方向测量。
4. 数据处理:激光雷达系统会通过采样和数字信号处理技术对接收到的激光信号进行滤波、去噪和数据分析等处理。
军用激光雷达

激光雷达技术及其应用(一)激光, 雷达, 分辨率, 技术, 能力20世纪60年代初出现了以测距为主要功能的激光雷达,它以高角分辨率、高速度分辨率、高距离分辨率、强抗干扰能力、良好的隐蔽性,以及出色的全天候工作能力在很多领域尤其是军事领域中得到了广泛的应用。
激光雷达技术也称机载激光雷达,它是一种安装在飞机上的机载激光系统,通过量测地面的三维坐标,生成激光雷达数据影像,经过相关软件处理后,可以生成地面的DEM模型、等值线图及DOM 正射影像图。
激光雷达系统通过扫描装置,沿航线采集地面点三维数据;系统可自动调节航带宽度,使其与航摄宽度精确匹配,在不同的实地条件下,平面精度可达0.1m,采样间隔为 2~12m。
激光雷达是集激光技术、光学技术和微弱信号技术于一体而发展起来的一种现代化光学遥感手段,它使用激光作为探测波段,波长较短而且是单色相干光,凶而呈现出极高的分辨本领和抗干扰能力,为其在各方面的应用奠定了重要基础。
激光雷达探测技术不仅可以获得目标地物表面的反射能量的大小,同时还可获取目标反射波谱的幅度、频率和相位等信息,用于测速和识别移动目标,在环境、生态、通信、航天等方面有着广泛的应用。
本文重点介绍激光雷达的技术现状和应用领域。
机载脉冲式激光雷达的发展简史激光雷达的研发早在上个世纪的七十年代就开始了(Jennifer and Jeff 1999)。
最初,是由美国的航天航空总署NASA研究出了一种非常笨重的基于激光测量的设备。
尽管它非常昂贵,也只能测量放在地面上的飞机的精确的高度。
在八十年代后期,随着GPS民用技术的提高,使得GPS对位置定位的精度达到了厘米的量级。
高精度的用于记录激光来回时间的计时器和高精度的惯导测量仪(Inertial Measurement Units,IMU)的相继问世,为激光雷达的商业化打下了基础。
激光雷达工作原理激光雷达的工作原理与雷达非常相近。
由激光器发射出的脉冲激光由空中入射到地面上,打到树木上,道路上,桥梁上,房子上,引起散射。
海洋激光雷达调研报告

海洋激光雷达调研报告海洋激光雷达是一种利用激光器发射光束并通过接收器接收反射光信号,以获得海洋深度、浑浊度、生态环境等信息的设备。
它具有高精度、高分辨率和长测距等特点,在海洋环境监测、水下探测以及海洋工程等领域有着广泛的应用前景。
本调研报告将对海洋激光雷达的原理、应用和发展进行详细介绍。
首先,海洋激光雷达的工作原理是利用激光器发射出的脉冲激光束照射到海洋表面,当光束遇到海浪、浑浊物质等障碍物时,部分光会被散射和吸收,剩余的光会被接收器接收并测量光的时间延迟来计算出海洋的深度。
通过多次测量和数据处理,可以绘制出一幅准确的海洋地形图。
同时,激光雷达还可以通过计算散射光的强度和频率来评估海洋的浑浊度和生态环境。
海洋激光雷达具有高精度的特点,其测深精度可达几厘米,远远超过其他测深技术。
这使得海洋激光雷达在海底测绘、航海导航和海洋工程等领域有着广泛的应用。
而且,激光雷达的测量范围较大,一般可达几千米,比传统的声呐测深技术更为适用。
除了测深外,海洋激光雷达还可以对海洋的浑浊度进行监测。
通过测量散射光的强度和频率,可以估计出海洋中悬浮物的浓度和类型,从而对海洋的环境状况进行评估。
这对于海洋生态保护和水质监测具有重要意义,可以提供数据支持和科学依据。
海洋激光雷达在海洋工程中也有着广泛的应用。
它可以用于海上建筑物的监测和维护,如海上风电场的桩基检测和腐蚀监测。
同时,在海底管道敷设和潜水作业中,激光雷达可以提供高精度的导航和位置信息,提高施工效率和安全性。
未来,海洋激光雷达的发展方向包括提高测量精度和扩大测量范围。
目前,激光雷达主要用于近海区域的测量,难以在深海或极地等复杂环境中应用。
因此,开展深海激光雷达技术的研究具有重要的意义。
此外,进一步提高激光雷达的测量精度和减小体积成本,也是未来的发展方向。
综上所述,海洋激光雷达具有高精度、高分辨率和长测距的特点,被广泛应用于海洋环境监测、水下探测和海洋工程等领域。
随着技术的进一步发展,海洋激光雷达有望在深海和极地等复杂环境中发挥更大的作用,并为海洋保护和资源开发提供更多的支持。
激光雷达综述
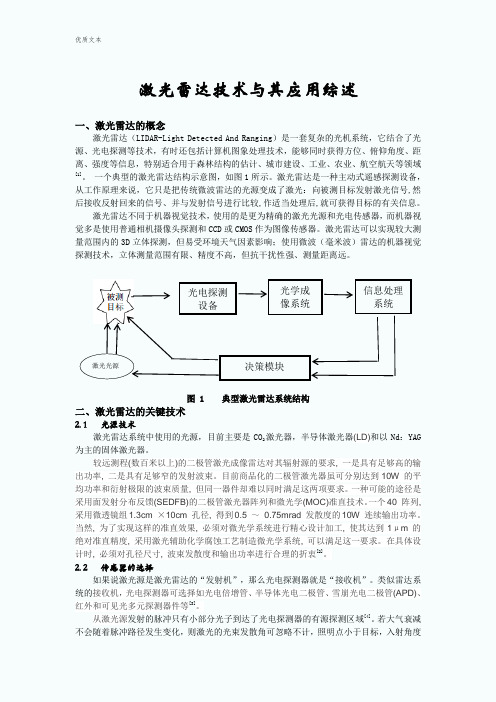
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
激光雷达在大气颗粒物监测中的技术原理与应用
激光雷达在大气颗粒物监测中的技术原理与应用激光雷达在大气颗粒物监测中的技术原理与应用,这个话题可真是既专业又有趣,咱们一起来聊聊吧。
激光雷达,简单说就是利用激光发射和接收的技术,测量空气中那些微小的颗粒物。
这可不是随便哪个小玩意儿能做到的,得依赖高科技的力量哦。
想象一下,激光就像是一个超级敏锐的侦探,嗖的一声发出一束光,看看空气中那些“藏身”的颗粒物,瞬间就把它们找出来,真是神乎其神。
它的原理其实就像是回声定位,激光打出去后碰到颗粒物反弹回来,传感器一接收,数据就来了。
真的是不费吹灰之力。
说到应用,那就更广泛了。
现在很多地方都用激光雷达来监测空气质量,比如城市的环保部门、气象站,甚至一些科研机构都在使用。
这不仅仅是为了检测灰尘、烟雾,还能帮助我们了解大气的变化,预报天气,简直是太厉害了。
就像在一场大雨来临之前,激光雷达能提前发出警报,让大家可以提前做好准备。
再想想,如果没有这些监测,咱们每天呼吸的空气里潜藏着多少危险,那可是让人毛骨悚然的事情。
激光雷达的好处可不止于此哦。
它的检测速度超级快,几乎是秒杀传统的监测方法。
想象一下,以前得花上几小时去收集数据,现在只需要短短几分钟,简直就是科技的飞跃。
这种技术还能实现远程监测,哪怕是在高空飞行的无人机上都能轻松搭载,真是让人佩服得五体投地。
它能在各种气象条件下工作,不怕风吹雨打,真是个不怕麻烦的小强。
激光雷达也不是万能的,它有自己的局限性。
有些情况下,空气中的水汽、云层等也会影响激光的传播和测量效果,导致数据不太准确。
但这并不妨碍它在环境监测中的重要性,咱们得正视它的优势,逐步完善技术。
谁说科技就一定是一帆风顺的呢,前路有挑战,但这也正是进步的动力。
在城市化快速发展的今天,空气质量问题愈发突出。
雾霾、污染成了大家的心头大患,激光雷达的出现无疑给了我们一线曙光。
想象一下,如果每个城市都能实时监测空气质量,大家的生活会变得多么美好啊。
每个人都能呼吸到清新的空气,不再担心那些看不见的敌人。
tof激光雷达测距原理(一)
tof激光雷达测距原理(一)TOF激光雷达测距原理TOF(Time of Flight)激光雷达是目前应用较广泛的测距技术之一。
本文将从浅入深,介绍TOF激光雷达的工作原理和相关技术细节。
什么是TOF激光雷达TOF激光雷达是一种基于激光测距原理的传感器。
它利用激光脉冲的发送和接收时间差来计算目标物体的距离。
TOF激光雷达可以广泛应用于自动驾驶、工业自动化、智能家居等领域。
TOF激光测距原理TOF激光雷达的测距原理是利用光的传播速度和发送接收时间差来计算距离。
1.发射激光脉冲:TOF激光雷达通过激光器发射一个短脉冲光束,该光束在空气中以光速传播。
2.接收反射光:光束照射到目标物体上后,会部分被反射回来。
TOF激光雷达内部的光接收器会接收到反射光,并记录下接收到光的时间。
3.计算距离:通过测量发射和接收时间差,乘以光速,即可得到目标物体到雷达的距离。
TOF激光雷达系统组成TOF激光雷达由以下几个主要组成部分构成:•激光器:产生短脉冲激光光束。
•光接收器:接收反射光,并记录接收时间。
•光电探测器:将接收的光信号转换为电信号。
•时间测量单元:记录发射和接收时间,计算时间差。
•数据处理单元:根据时间差和光速计算目标物体的距离。
TOF激光雷达的优点和挑战TOF激光雷达相比其他测距技术具有以下优点:•高精度:基于光速计算距离,测距精度高。
•高可靠性:不易受环境光影响,适用于各种场景。
•高抗干扰能力:能有效抑制其他光源的干扰。
然而,TOF激光雷达也面临一些挑战:•成本较高:相比其他传感器,TOF激光雷达的价格较高。
•受材料反射率影响:目标物体的材料反射率会影响测距精度。
•多目标识别:同时测量多个目标物体的距离需要较高的处理能力。
结语TOF激光雷达是一种应用广泛的测距技术,利用激光脉冲的发送和接收时间差来计算目标物体的距离。
它的工作原理简单,但在实际应用中需要考虑诸多因素,如材料反射率和多目标识别能力。
TOF激光雷达在自动驾驶、工业自动化等领域具有广阔的应用前景。
激光雷达系统
历史沿革
自从1839年由Daguerre和Niepce拍摄第一张像片以来,利用像片制作像片平面图(X、Y)技术一直沿用。到 了1901年荷兰人Fourcade发明了摄影测量的立体观测技术,使得从二维像片可以获取地面三维数据(X、Y、Z)成 为可能。一百年以来,立体摄影测量仍然是获取地面三维数据最精确和最可靠的技术,是国家基本比例尺地形图 测绘的重要技术。
激光雷达系统
激光探测及测距系统的简称
01 简介
03 技术发展 05 基本原理
目录
02 历史沿革 04 主要途径 06 主要用途
激光雷达LiDAR(LightLaser Detection and Ranging),是激光探测及测距系统的简称。
用激光器作为辐射源的雷达。激光雷达是激光技术与雷达技术相结合的产物。由发射机、天线、接收机、跟 踪架及信息处理等部分组成。发射机是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器、半导体 激光器及波长可调谐的固体激光器等;天线是光学望远镜;接收机采用各种形式的光电探测器,如光电倍增管、 半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等。激光雷达采用脉冲或连续波2种工作方式, 探测方法分直接探测与外差探测。
基本原理
LIDAR是一种集激光,全球定位系统(GPS)和惯性导航系统(INS)三种技术与一身的系统,用于获得数据并生 成精确的DEM。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑。它又分为日臻成熟的用于获 得地面数字高程模型(DEM)的地形LIDAR系统和已经成熟应用的用于获得水下DEM的水文LIDAR系统,这两种系统 的共同特点都是利用激光进行探测和测量,这也正是LIDAR一词的英文原译,即:LIght Detection And Ranging - LIDAR。
简述激光雷达的原理及特点
简述激光雷达的原理及特点激光雷达(Lidar)是一种利用激光技术进行测距和探测的传感器,具有高精度、高分辨率和长测距等特点。
它通过发射激光束并测量其返回时间来计算目标物体的距离和位置。
激光雷达在自动驾驶、环境感知、地图绘制等领域具有广泛应用。
激光雷达的原理是利用激光器发射激光束,然后通过接收器接收激光束的反射信号。
激光器发射的激光束经过透镜系统聚焦成一个非常小的光斑,然后照射到目标物体上。
目标物体对激光束的反射会使得一部分光返回到激光雷达的接收器上。
接收器接收到返回的光信号后,通过测量光的时间延迟来计算目标物体与激光雷达之间的距离。
同时,激光雷达还可以通过测量激光束的散射角度和接收到的光的强度来获取目标物体的位置和形状信息。
激光雷达具有以下几个特点:1. 高精度:激光雷达可以实现毫米级的距离测量精度,可以准确地测量目标物体与激光雷达之间的距离。
2. 高分辨率:激光雷达可以通过调整激光束的角度和分辨率来获取目标物体的位置和形状信息。
它可以在较短的时间内获取大量的数据,从而实现对目标物体的精确探测和测量。
3. 长测距:激光雷达可以实现长距离的测量,一般可以达到几百米甚至几千米的距离。
这使得激光雷达在遥感、无人机和自动驾驶等领域具有广泛的应用。
4. 多目标探测:激光雷达可以同时探测多个目标物体,而且在探测过程中不会相互干扰。
这使得激光雷达在自动驾驶和环境感知等领域具有很大的优势。
激光雷达在自动驾驶领域的应用越来越广泛。
它可以实时获取道路上的障碍物、行人和车辆等信息,为自动驾驶系统提供高精度、高分辨率的环境感知能力。
激光雷达还可以用于制作高精度的地图,为自动驾驶车辆提供准确的定位和导航信息。
激光雷达还广泛应用于测绘、遥感和环境监测等领域。
它可以快速准确地获取地形、建筑物和植被等信息,为城市规划、土地利用和环境保护等提供重要的数据支持。
激光雷达是一种利用激光技术进行测距和探测的传感器,具有高精度、高分辨率和长测距等特点。
第4章 激光雷达的原理及其应用
➢ 在2018年的 CES (国际消费类电子产品展览会)上 ,Velodyne 对外展
示了两款产品:128
线激光雷达
VLS-128和固态激光
雷达
Velarray。
Car 情报局
1、激光雷达在无人驾驶中的作用
环境地图构建
Car 情报局
2
激光雷达的概念
Car 情报局
2.1、激光雷达的概念
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达;它是以激 光 作为载波,以光电探测器为接收器件,以光学望远镜为天线。
LIDAR,(Light Detention and Ranging) LADAR, (Laser Detection and Ranging)
Car 情报局
1
激光雷达在无人驾驶中的作用
Car 情报局
1、激光雷达在无人驾驶中的作用
激光雷达是无人驾驶车辆的“标配”
Car 情报局
1、激光雷达在无人驾驶中的作用
障碍与行人检测
图片来源于IBEO官网视频
Car 情报局
1、激光雷达在无人驾驶中的作用
车距精准控制
图片来源于IBEO官网视频
Car 情报局
Car 情报局
5.7、无人车载激光雷达遇到的挑战
恶劣环境适应性
Car 情报局
5.7、无人车载激光雷达遇到的挑战
恶劣环境适应性
Car 情报局
5.7、无人车载激光雷达遇到的挑战
计算量大
Car 情报局
6
车载激光雷达的发展趋势
Car 情报局
6.1、激光雷达的成本将进一步降低
Car 情报局
6.2、激光雷达向多线束以及固态激光雷达发展
Car 情报局
激光扫描雷达的工作原理与使用注意事项
激光扫描雷达的工作原理与使用注意事项激光扫描雷达是一种高精度、高分辨率的测距设备,广泛应用于无人驾驶、机器人导航、环境感知等领域。
它利用激光束的特性进行扫描,通过测量激光束的往返时间和角度来确定物体的距离和位置。
本文将介绍激光扫描雷达的工作原理,并提供使用激光扫描雷达时需要注意的事项。
一、工作原理激光扫描雷达的工作原理可以简单地分为三个步骤:发射激光束、接收回波信号、计算距离和位置。
首先,激光扫描雷达会通过发射器产生一束激光束,并利用伺服系统实现扫描。
这些激光束发射到周围环境中,并被物体表面反射回来。
接下来,激光扫描雷达会接收回波信号,并记录下激光束离开和回到雷达的时间差,即往返时间。
由于激光的速度是已知的,可以利用往返时间来计算距离。
最后,激光扫描雷达通过扫描的角度和已知位置来确定物体在空间中的位置。
通过不断扫描并记录激光束的位置和距离,可以获取到物体的精确位置信息。
二、使用注意事项使用激光扫描雷达时需要注意以下几个方面:1.安全性激光扫描雷达使用激光束进行扫描,因此在使用过程中需要注意安全问题。
激光束对人眼有一定的伤害,因此在实验室或使用场景中应该避免激光直接照射到人眼。
同时,也需要注意周围环境的安全,防止激光束对其他物体造成损害。
2.环境适应性激光扫描雷达对环境的适应性是一个重要的考虑因素。
不同类型的激光雷达在不同环境下的性能可能会有所不同,因此在选择激光扫描雷达时需要考虑使用场景的特点,并选择适合的型号。
3.抗干扰能力在实际应用中,激光扫描雷达可能会受到一些干扰,如其他光源的影响、物体表面的反射性等。
因此,在使用激光扫描雷达时,需要保证信号的准确性和稳定性,尽量消除或降低干扰源对测量结果的影响。
4.数据处理激光扫描雷达在工作过程中会产生大量的数据,因此需要进行有效的数据处理。
数据处理包括数据的采集、存储和分析等步骤,需要根据具体应用场景选择合适的数据处理方法和算法。
5.校准和维护激光扫描雷达在使用之前需要进行校准,以保证测量结果的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光雷达工作原理及应用
通常,为了统计高速公路卡口在一定时间内所通过的车辆,需要对过往车
辆进行准确的判断,十分考验实现探测产品的准确性。以往,大家对激光雷
达在车流统计中的应用并不广泛熟识,我们可以通过一个实际案例来了解。
实际应用案例
图1 激光雷达安装实景图(来自真实客户分享)
工作原理
将激光雷达安装在车道正上方,使之垂直向下探测,如图1所示
当没有车辆经过时,探测的是激光雷达到地面的距离,假定为X
当有车辆经过激光雷达下方时,探测的是激光雷达到车辆顶部的距离,假
定为Z