理论力学第6章(2)A
理论力学习题答案
第三章 空间力系
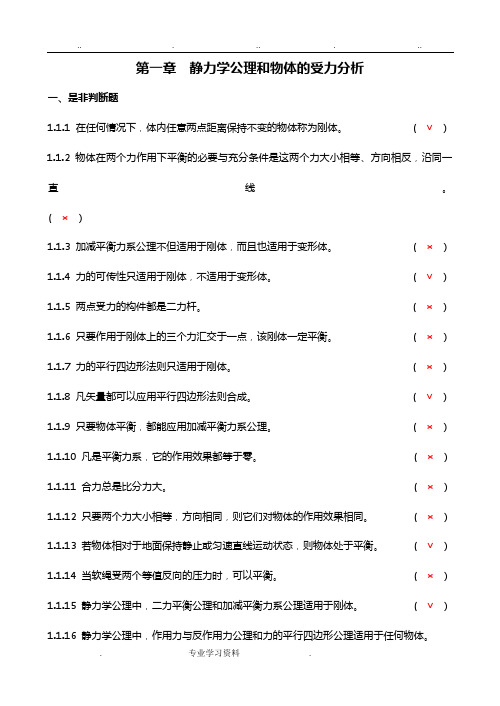
一、是非题判断题
3.1.1对一空间任意力系,若其力多边形自行封闭,则该力系的主矢为零。 (∨)
平面力系中,若其力多边形自行闭合,则力系平衡。(×)
3.1.2只要是空间力系就可以列出6 个独立的平衡方程。 (×)
2.3.4悬臂式吊车的结构简图如图所示,由DE、AC二杆组成,A、B、C为铰链连接。已知P1=5kN,P2=1kN,不计杆重,试求杆AC杆所受的力和B点的支反力。
(答案:FBx=3.33kN,FBy=0.25kN,FAC=6.65kN)
2.3.5由AC和CD构成的组合粱通过铰链C连接,它的支承和受力如图所示,已知均布载荷强度q=10kN/m,力偶矩M=40kN.m,不计梁重,求支座A、B、D的约束反力和铰链C处所受的力。
3.1.3若由三个力偶组成的空间力偶系平衡,则三个力偶矩矢首尾相连必构成自行封闭的三角形。(∨)
3.1.4空间汇交力系平衡的充分和必要条件是力系的合力为零;空间力偶系平衡的充分和必要条件是力偶系的合力偶矩为零。(∨)
二、填空题
3.2.1若一空间力系中各力的作用线平行于某一固定平面,则此力系有5个独立的平衡方程。
3.3.3如图所示,三圆盘A、B、C的半径分别为15cm、10cm、5cm,三根轴OA、OB、OC在同一平面内,∠AOB为直角,三个圆盘上分别受三个力偶作用,求使物体平衡所需的力F和α角。
3.3.4某传动轴由A、B两轴承支承。圆柱直齿轮的节圆直径d=17.3cm,压力角 =20º,在法兰盘上作用一力偶矩为M=1030N.m的力偶,如轮轴的自重和摩擦不计,求传动轴匀速转动时A、B两轴承的约束反力。(答案:FAx=4.2kN,FAz=1.54kN,FBz=7.7kN,FBz.=2.79kN)
理论力学习题及答案(全)
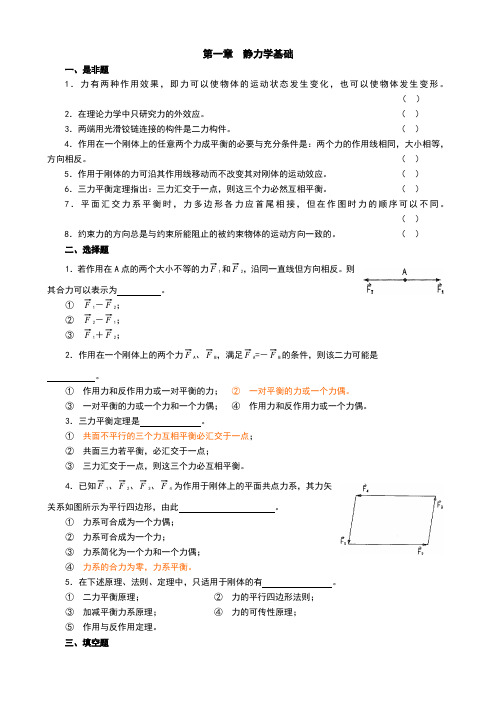
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。
第6章 虚功原理1

y
x1 = asin θ
y1 = a cosθ x2 = asin θ + bsin ϕ y2 = a cosθ + bcosϕ
理论力学电子教案:张建辉制作
θ, ϕ ⇒广义坐标
虚位移原理
自 由 度 —— 在完整约束条件下,确定质点系位置的独立参变 量的数目等于系统的自由度数N 量的数目等于系统的自由度数N。
6.1.4完整 6.1.4完整约束与非完整约束 完整约束与非完整约束 完整约束 —— 约束方程不包含质点速度,或者包含质点 约束方程不包含质点速度, 速度但约束方程是可以积分的约束(几何约束以及可以积分的运动约束) 速度但约束方程是可以积分的约束(几何约束以及可以积分的运动约束);
fα (xi , yi , zi ) = 0, i =1,2,⋅⋅⋅, n(质点数); α = 1,2,⋅⋅⋅, s(约束数)
N=2n-s (二维平面 ) n:质点的数目; s:约束方程的数量 N=2 N=3n-s (三维空间) N=3
O
θ
n:质点的数目; s:约束方程的数量
O
a θ A(x1, y1) ϕ b B(x2, y2)
x l
x
A(x, y)
y
y
N=2 s=2*1N=2n-s=2*1-1=1
理论力学电子教案:张建辉制作
Fi mi m2
FNi
δ ri
Fi ——主动力 对于具有理想约束的质点系,其平衡条件是:作用 于质点系的主动力在任何虚位移中所作的虚功的和 等于零—— 等于零——虚位移原理
理论力学电子教案:张建辉制作
FNi——约束反力
δ ri——虚位移
虚位移原理
F = Fxi i + Fyi j + Fzik i
理论力学作业答案
解:力系对O点的主矩在轴上的投影为
M Ox M x F F2 cos a .100 F3 sin .300 51.8 N .m M Oy M y F F1 .200 F2 sin a .100 36.64 N .m M Oz M z F F2 cos a .200 F3 cos .300 103.6 N .m
FCy
P1
FDx
解得: FCy 4550 N
P
3、研究杆ABC
FCy
C
M F F
y
C
0
M A 6FAx 3FBx 0 0
B
FCx
FBy
FAy FBy FCy P3 0
x
0
FBx
FAx FBx FCx 0
MA P3 FAy
A
解得: FBx 22800, FBy 17850
M M FAx tan , FAy , M A M a a
3-9(b)
已知:q, M, a,. 不计梁自重,求支座A、B、C约束反力。 FNC FBy FBx
解:BC段梁受力分析如图,平面任意力系平衡方程为
F F
解得:
FNC
x y
0 FBx FNC sin 0 0 FBy qa FNC cos 0
解得: FAx 0, FAy 1 F M , FNB 1 3F M 2 a 2 a
3-5(b)
已知:F, M, q, a, 求支座A、B约束反力。
q
M
解:梁受力分析如 图,平面任意力系 平衡方程为
FAx
理论力学答案

①其质心C将仍然保持静止;②其质心C将沿图示x轴方向作直线运动;
③其质心C将沿某一方向作直线运动;④其质心C将作曲线运动。
10.3.5如图10.4所示两个相同的均质圆盘,放在光滑水平面上,在圆盘的不同位置上,各作用一水平力F和F,,使圆盘由静止开始运动,设F=F,,问哪个圆盘的质心运动得
8.4.6在图示四连杆机构中,已知 。在图示位置时,OA杆的角速度ω=2rad/s,角加速度α=3 rad/s2,O、A、B位于同一水平线上,且垂直于O1B。试求该瞬时:(1)AB杆的角速度和角加速度;(2)O1B杆的角速度和角加速度。(答案:ωAB=0.8 rad/s,αAB=1.2rad/s2;ωO1B=0,αO1B=2.24rad/s2)
8.4.2如图所示,在筛动机构中,筛子的摆动是由曲柄连杆机构所带动。已知曲柄OA的转速 , 。当筛子BC运动到与点O在同一水平线上时, 。求此瞬时筛子BC的速度。
8.4.3曲柄O角速度ω=2rad/s绕轴O转动,带动等边三角形ABC作平面运动。板上点B与杆O1B铰接,点C与套筒铰接,而套筒可在绕轴O2转动的杆O2D上滑动。OA=AB=BC=CA=O2C=1m,当OA水平,AB∥O2D,O1B与BC在同一直线上时,求杆O2D的角速度ω2。(答案:ω2=0.577rad/s)
9.2.3重物M重10 N,系于30cm长的细线上,线的另一端系于固定点O。重物在水平面内作圆周运动,成一锥摆形状,且细线与铅垂线成30˚角。求重物的速度与线的拉力。
(答案:FT=11.6N,v=0.94m/s)
9.2.4物体M重为P=10N,置于能绕y轴转动的光滑斜面上,θ=30o,绳索长L=2m,物体随同斜面一起以匀转速n=10r/min转动,试求绳子的拉力(取g=10m/s2)。(答案:FT=6.65N)
理论力学第二章(2)
合力FR 的大小等于原力系的主矢
合力FR 的作用线位置
MO FR
小结:平面任意力系简化结果讨论
主矢
FR 0
FR 0
主矩
MO 0
MO 0 MO 0
MO 0
最后结果
说明
合力 合力作用线过简化中心
合力 合力偶
合力作用线距简化中心M O FR
与简化中心的位置无关
平衡
与简化中心的位置无关
21
简化为一个力:
c os (FR
,
i)
Fx FR
,
cos(FR ,
j)
Fy FR
原力系的主矢与简化中心O的位置无关
主矩: 原力系中各力对简化中心O之矩的代数和称为原力
系对点O的主矩。
n
M O M O (F1) M O (F2 ) ...... M O (Fn ) M o (Fi ) i 1
主矩与简化中心的选择有关
称点O为简化中心 F1’、F2’、….Fn’平面汇交力系,合力为FR’
M1、M2、….Mn平面力偶系,合力偶矩为MO
10
1、主矢和主矩
FR’=F1’+F2’+….+Fn’=F ’= F
主矢:量(简平称面为力主系矢中)所有各力的矢量和FR′称为该力系的主矢
主矢FR′的大小和方向余弦为:
FR (Fx )2 (Fy )2
11
平面任意力系向作用面内一点简化
一般力系(任意力系)向一点简化汇交力系+力偶系
(复杂力系)
(两个简单力系)
汇交力系 力偶系
力,FR‘(主矢) , (作用在简化中心)
力偶 ,MO (主矩) , (作用在该平面上)
理论力学-总目录
静力学模型( 1-010 1-019 )
力的基本概念( 1-020 1-031 )
)
工程常见的约束与约束力( 1-032 1-063
受力分析与受力图( 1-064 1-091 ) 结论与讨论( 1-092 1-107 )
第2章 力系的等效与简化( 2-004 2-133 )
平衡与平衡条件( 3-007 3-020 ) 任意力系的平衡方程( 3-021 3-031 ) 平面力系的平衡方程( 3-032 3-040 ) 平衡方程的应用( 3-041 3-065 ) 刚体系统平衡问题( 3-066 3-088 ) 平面静定桁架的静力分析( 3-089 3-135 ) 考虑摩擦时的平衡问题( 3-136 3-190 ) 结论与讨论( 3-191 3-232 )
第 13 章 动力学普遍方程和第二类
返回
拉ห้องสมุดไป่ตู้朗日方程
第7章 质点动力学( 7-013 7-133 ) 质点运动微分方程( 7-016 7-032 )
非惯性系下的质点
运动微分方程( 7-033 7-067 )
机械振动基础( 7-068 7-111 )
结论与讨论( 7-112 7-126 )
第11章 达朗贝尔原理
及其应用( 11-004 11-096 ) 惯性力与达朗贝尔原理( 11-012 11-022 )
惯性力系的简化( 11-023 11-038 )
达朗贝尔原理的 应用示例( 11-039 11-051 ) 结论与讨论( 11-052 11-074 ) 参考性例题( 11-075 11-096 )
第6章 刚体的平面运动分析( 6-004 6-122 )
理论力学自测题 答案
A图1-2图1-1第一章 静力学基本公理与物体的受力分析 思考题答案1、 刚体上A 点受力F 作用,如图所示。
请问能否在B 点加一个力使刚体平衡?为什么? 答案:不能平衡。
原因:刚体受两个作用而平衡则满足二力平衡条件。
要求 考核点:二力平衡条件。
2、 图所示结构,请思考如下两个问题:(1) 若力F 作用在B 点,结构能否平衡?(2) 若力F 仍作用在B 点,但可任意改变力F 的方向,则F 在什么方向上结构能否平衡?答案:(1)不能平衡。
原因:A 处为滚动铰支座,其约束力方向沿杆AB 方向,如图示红虚线;CE 为二力杆,故E 处的约束力一定沿CE 方向,图;此两力汇交于点C ,现系统在三力作用下平衡,应满足三力平衡条件,这就要求力F 过上两力的汇交点C ,图示力F 不过点C ,故不能平衡。
(2 ) F 作用线沿BC 连线方向。
原因:同上:由三力平衡汇交定理,作用于B 处的力必须过其它两力的汇交点(本题为点C ),故系统要平衡,F 作用线必须沿BC 连线的方向。
图1-3图1-4(a)F 3、 各物体的受力图是否有误?若有,如何改正之?本题的考核点分析:(1) 柔索约束只能受拉,图示F TB 画成了受压;(2) 固定铰支座A 处的约束力有误。
图示画成沿杆AB 方向,而杆又不是二力杆,显然是错误的。
此处的力有两种画法,一种按三力平衡汇交来画,如图示红线;也可将A 处的力直接画成F Ax +F Ay 的形式,如图的画法二。
本题的考核点分析:(1) 光滑接触面约束:指向受力物体,方向沿公法线方向。
(2) 对于点接触的光滑接解面约束可将其看作一个小圆弧便于理解。
(3) 正确的受力分析见图(a)。
(a)(b)图1-5AA(a)图1-6AF B本题的考核点分析:(1) 图(b)的画法显然是按三力平衡汇交定理作的,未考虑均布载荷q ,显然是错误的。
(2) 正确的画法:将图上的F A 去掉,将固定铰支座A 处的力画成两个正交的分力即可,如图(a)。
理论力学第二章(汇交力系)
2) 合力
力矢量合成的力多边形法则: 1) 各分力首尾相接,次序可变;
R 为封闭边。
z F3 FR F2 F1 x
5
2、空间汇交力系合成的几何法
r r r r r r FR = F1 + F2 + F3 + F4 = Σ Fi ,
合成为一个合力,合力的大小与方向等于 各分力的矢量和,合力的作用线过汇交点.
FR = F1 + F2 + L + Fn = ∑ Fi
向两个坐标轴投影,
FR = FRx + FRy = (∑ Fix ) + (∑ Fiy )
2 2 2
2
FR
合力方向 FRx ∑ Fix FRy cos θ = = , sin θ = = FR FR FR 合力投影定理:
∑F
FR
iy
10 合力在任一轴上的投影等于各分力在同一轴上投影的代数和。
FDA
P
FDB=FDC=289N。
18
例 :起重机起吊重量P = 1 kN, ABC 在 yz 平面内,求:立柱 x’ AB、绳BC,BD,BE 的拉力。 解:B点有四个未知力汇 交,故先从C点求解,
[C] 平面汇交力系 z 750
B 450 E FBE FBD 450 450 D x A y 450 F BA 450 FCB FBC 300 FCA
汇交力系的平衡条件为:力系中各力在x、y、z三个坐标 轴的每一轴上投影之代数和均为零。 14 汇交力系平衡的几何条件为:力多边形自行封闭。
汇交力系平衡条件的应用
例:园柱物置于光滑的燕尾槽内,已知:P 为 500 N,求: 接触处A、B的约束力。
理论力学课后答案第二章
・研充时HI按* Et3 : Al平術汇空宦歼b交料川的钓痕力耳处通it点心方自即阳b陌示.Ik帑标条C T■Ell平胡理论咼SA t=€.F-"K3=0⑴已暂F兰5 ODD N .棗与撑祎自虫不计匚求BC'ffK内力及铁员的反力。
解该系统曼力如图(訂, 三力匸交于艰0・苴封訥的力三角膠如图冷人祥得屉二5OOON』仏二疔000 W如曲日所m - I刖架的点釦乍门木平力只刷噓浪就不if求支屎儿D的约2-2%="F2-3铰链4杆机构CABD的CD边固定,在铰链A、B处有力F i, F2作用,如图所示。
该机构在图示位置平衡,不计杆自重。
求力F i与F2的关系。
心)何y已扣两伦备車P A ^P L •处于T 册状态,杆電 不比求I )若片=丹=巴 角e -?2)若 P A - 300 B = 0血=?ffi 八5两轮受力分别如图示■对A 辂育SX = 0* F 刚 cEjedO* — F\g oos$ = 0 SY 二 0aF sx tin60T - F 屈 sinfl - P A = tj对 B 轮育 SX ■0, Fn ooa? - F,\&8^3(/ = 0 IV = 0. F rw sinff 下 F 斶 anJO* - P n =(1)四牛封程嬴立求AL 爾<3-30*(2)把拧-0\F A - 300 M 代入方社,联立解筹P fl = 100 N2-5如图2-10所示,刚架上作用力F 。
试分别计算力F解 M A (F) = -FbcoseM s [F) - -Fb cos0 + FosinB二F(osiii0-bcos0)况下支座A 和B 的约束力。
2-6已知梁AB 上作用1力偶,力偶矩为M ,梁长为I ,梁重不计。
求在图 a, b, c 三种情2-4解⑴柠点掐坐WAS 力如囲 归所示"H3平祈刖论咼=0,cosl5° + F 1C osS0e =0. F ..=*92g节点瓦腿标歴覺力如国所小*血丫轉理论得2S -F^ ccs 30fr -f ; cosW )0 =0^=-^=—^— = 1.553^ F 、:- 0.644对点A 和B 的力矩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6 点的合成运动(2)
一、 是非题
1、 用合成运动的方法分析点的运动时,若牵连角速度0e≠,相对速度0vr≠,则一定
有不为零的科氏加速度。 (×)
2、 牵连速度是动参考系相对于固定参考系的速度。 (×)
3、 当牵连运动为定轴转动时,牵连加速度等于牵连速度对时间的一阶导数。 (×)
4、 当牵连运动为平动时,相对加速度等于相对速度对时间的一阶导数。 (√)
5、 考虑地球自转,地球上的任何地方运动的物体(质点),都有科氏加速度。 (×)
6、不论牵连运动为何种运动,点的速度合成定理reavvv+=皆成立。 (√)
7、在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。(×)
8、若将动坐标取在作定轴转动的刚体上,则刚体内沿平行于转动轴的直线运动的动点,其
加速度一定等于牵连加速度和相对加速度的矢量和。 (√)
9、刚体作定轴转动,动点M在刚体内沿平行于转动轴的直线运动,若取刚体为动坐标系,
则任一瞬时动点的牵连加速度都是相等的。 (×)
10、当牵连运动为定轴转动时一定有科氏加速度。 (×)
二、1) D 2) B、A、D 3) B、A 4) C
三、
一)运动分析
1.选AB杆上A为动点;
2.动系固定在偏心轮上;
3.
绝对运动:点的直线运动;
相对运动:点的曲线运动;
牵连运动:刚体定轴转动。
牵连点:轮O上的A’点;
牵连点运动:点的圆周运动。
二)速度计算,画v矢量图
ecotOAcotvvea
四,
一)运动分析
1.选OA杆上的A点为动点
2.动坐标系固连于BC杆
3.绝对运动是点的圆周运动;相对运动是点的直线运动;
牵连运动是刚体的平行移动。
二)速度计算
在动点上画v矢量图
s/m173.030cosr30cosvvae
三)加速度计算
在动点上画a矢量图,牵连运动为平移运动,只有3个加
e
a
r
a
n
a
a
a
v
e
v
r
v
e
v
r
v
a
v
速度,可用对角线关系确定各加速度的实际方向,然后用
三角计算算出加速度的大小:
22n
ae
s/m05.030sinr30sinaa
五、
一)运动分析
1.选AB杆上的A点为动点
2.动坐标系固连于凸轮上。
3.绝对运动是点的直线运动;相对运动是点的圆周运动;
牵连运动是刚体的平行转动。
二)速度计算 在动点上画v矢量图
30v30vv30v30vv0er0eacos/cos/ tantan
三)加速度计算
在动点上画a矢量图,牵连运动为平移运动,但凸轮匀速运
动,牵连加速度为零,只有三个加速度,可用对角线关系确
定各加速度的实际方向。
由几何关系计算出:
R9v38R3v2R3v2aa203202rnracoscoscos
由rtrnraaaaa可知绝对加速度与相对加速度的大小相等。
六、
一)运动分析
1. 取OA杆上A点为动点,
2. 动系固定于凸轮上,
3. 三运动:
1) 绝对运动:点的圆周运动;
2) 相对运动:点的圆周运动;
3) 牵连运动:刚体的平动。
二)求速度
在动点上画v矢量图
三)加速度计算
绝对运动和相对运动都是点的圆周运动,都分解为切向与法向加速度:
在动点上画加速度矢量图,
对五个加速度矢量,先画出方向已知的三个。
将
等号两边分别向n轴投影
nrenat
a
a60cosa60cosa30cosa
30cos/)60cosaa60cosa(a
nanret
a
)rua(33a2ta-=
)-(rOAruar33a2ta
etrnra
aaaa
a
a
n
r
a
t
r
a
e
v
a
v
r
v
A
u
a
o
3
u
30cos2ve=°
=
ra
vv=
rea
aaa
nrtrenat
a
aaaaa
nrtrenat
a
aaaaa
A
u
a
o
t
a
a
e
a
n
r
a
n
a
a
t
r
a
n
a
v
e
v
r
v
备用
一)运动分析
1.选CD杆上的C点为动点
2.动坐标系固连于AB杆
3.绝对运动是点的直线运动;相对运动是点的直线运动;牵连运动是刚体的平移运动。
二)速度计算
在动点上画v矢量图
s/m1.02/r30sinvvea
三)加速度计算
在动点上画a矢量图,牵连运动为平移运动,只有3个加速度,可用对角线关系确定各加
速度的实际方向,然后用三角计算算出加速度的大小:
22n
ea
s/m346.030cosr30cosaa
为什么此题计算加速度时不必用加速度矢量方程进行投影的方法?而是直接用几何计算算
出加速度的大小即可?
a
a
n
r
a
r
a