某型无人机涡喷发动机空中停车故障分析
某涡桨发动机空中异常顺桨故障分析
某涡桨发动机空中异常顺桨故障分析作者:钟榈黄庆李慈应来源:《科学导报·科学工程与电力》2019年第24期【摘; 要】针对某涡桨发动机发生空中顺桨故障,对螺旋桨顺桨的原理进行分析,建立故障树,通过飞行参数分析、工业CT成像检查、零件分解检查,故障零件理化分析等,初步确定原因为:反桨连杆碳炭刷组件在螺旋桨进行复装时安装错误,反馈环与碳刷组件异常磨损后贝塔活门完全弹出导致。
通过对故障原因进行分析,准确定位了故障原因,并通过地面整机试验复现了转速异常偏高的现象。
最后提出改进措施,增加对照检验要求和慢车桨速异常告警。
【关键词】涡桨发动机;顺桨;调速器;贝塔活门;故障1 故障情况某型飞机在转场后进行了螺旋桨复装,在复装后进行第二次飞行时,爬升过程中出现螺旋桨空中顺桨,飞机应急返航。
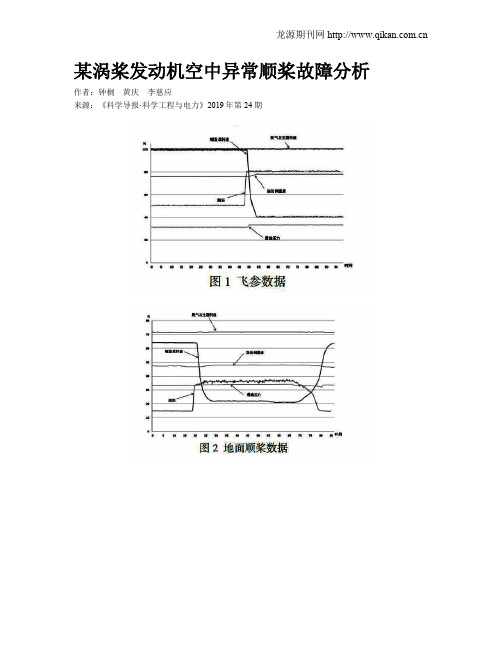
飞参数据如图1所示,爬升过程中在无任何操作指令的情况下螺旋桨转速突然下降,5秒内螺旋桨转速由100%下降至40%,燃气发生器的转速保持在100%不变,发动机输出扭矩上升60%,燃气涡轮后温度T4.5上升约20℃,发动机滑油压力由0.31Mpa上升至0.33MPa。
从数据上分析,螺旋桨转速突然下降后,燃气发生器的转速依然保持在100%,表明燃气发生器发出的功保持不变,输出轴的转速降低所以扭矩增大;自由涡轮与螺旋桨机械连接,顺桨后转速一同降低,致使发动机空气流量减少,发动机T4.5温度升高;滑油压力上升表明滑油系统某处的用油量减少。
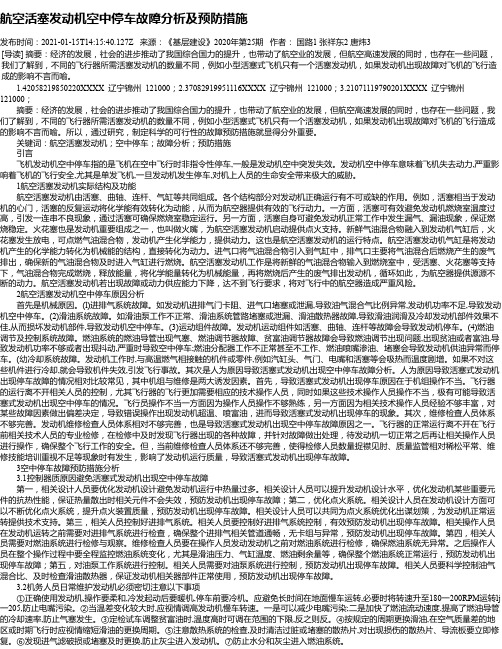
发动机在地面试车慢车时,进行顺桨的操作发动机参数变化情况如图2所示,可以发现其参数变化与事故架次的发动机参数变化趋势一致,据此判断螺旋桨异常进入顺桨状态。
2螺旋槳顺桨原理3故障树分析3.1故障树根据螺旋桨工作原理,以螺旋桨异常顺桨为顶事件建立故障树,排查螺旋桨顺桨的原因。
3.2底事件排除1)若调速器输入轴驱动失效,发动机驱动力无法传递到调速器,调速器齿轮泵无法为滑油加压,螺旋桨控制油路油压将持续减小,则螺旋桨在顺桨弹簧力和桨叶配重离心力的作用下变大距至低转速或顺桨状态。
航空活塞发动机空中停车故障分析及预防措施
航空活塞发动机空中停车故障分析及预防措施发布时间:2021-01-15T14:15:40.127Z 来源:《基层建设》2020年第25期作者:国路1 张祥东2 唐炜3[导读] 摘要:经济的发展,社会的进步推动了我国综合国力的提升,也带动了航空业的发展,但航空高速发展的同时,也存在一些问题,我们了解到,不同的飞行器所需活塞发动机的数量不同,例如小型活塞式飞机只有一个活塞发动机,如果发动机出现故障对飞机的飞行造成的影响不言而喻。
1.42058219850220XXXX 辽宁锦州 121000;2.37082919951116XXXX 辽宁锦州 121000;3.21071119790201XXXX 辽宁锦州121000;摘要:经济的发展,社会的进步推动了我国综合国力的提升,也带动了航空业的发展,但航空高速发展的同时,也存在一些问题,我们了解到,不同的飞行器所需活塞发动机的数量不同,例如小型活塞式飞机只有一个活塞发动机,如果发动机出现故障对飞机的飞行造成的影响不言而喻。
所以,通过研究,制定科学的可行性的故障预防措施就显得分外重要。
关键词:航空活塞发动机;空中停车;故障分析;预防措施引言飞机发动机空中停车指的是飞机在空中飞行时非指令性停车,一般是发动机空中突发失效。
发动机空中停车意味着飞机失去动力,严重影响着飞机的飞行安全,尤其是单发飞机,一旦发动机发生停车,对机上人员的生命安全带来极大的威胁。
1航空活塞发动机实际结构及功能航空活塞发动机由活塞、曲轴、连杆、气缸等共同组成。
各个结构部分对发动机正确运行有不可或缺的作用。
例如,活塞相当于发动机的心门,活塞的反复运动将化学能有效转化为动能,从而为航空器提供有效的飞行动力。
一方面,活塞可有效避免发动机燃烧室温度过高,引发一连串不良现象,通过活塞可确保燃烧室稳定运行。
另一方面,活塞自身可避免发动机正常工作中发生漏气、漏油现象,保证燃烧稳定。
火花塞也是发动机重要组成之一,也叫做火嘴,为航空活塞发动机启动提供点火支持。
某涡轴发动机起停姿态下润滑系统特性试验分析

某涡轴发动机起停姿态下润滑系统特性试验分析涡轴发动机作为现代飞机的重要动力系统,其润滑系统的性能和可靠性对发动机寿命和安全运行至关重要。
因此,需要对发动机在不同起停姿态下润滑系统的特性进行试验分析。
涡轴发动机的润滑系统主要包括油箱、泵、滤清器、冷却器、润滑油管路和润滑油喷油器等部件。
在发动机一系列启动和停止的过程中,这些组成部件需要协同工作,才能保持发动机正常运行。
当发动机处于起动阶段时,由于油液没有到达润滑部件的位置,因此需要进行干转保护。
而在发动机停止时,要保证润滑系统的稳定性,防止油液汇聚和油口堵塞等现象,以免影响发动机下次启动的性能。
针对以上问题,本文将对涡轴发动机在起停姿态下润滑系统进行特性试验分析,着重分析如下内容:起动阶段干转保护、润滑系统稳定性、油液汇聚和油口堵塞等影响润滑系统的因素。
1. 起动阶段干转保护起动阶段是涡轴发动机最脆弱的阶段,在此阶段润滑系统不能正常工作,会导致发动机主轴的滑动轴承持续干转,从而损坏轴承表面和形成热量。
因此,需要采取措施保护润滑系统。
防干转技术是涡轴发动机常用的保护措施,通过使起动机能安全地将润滑油液输送到发动机的润滑轴承上,以确保润滑油液在轴承上充分润滑后再进行发动机启动。
防干转通常是在起动飞轮或起动机轴上设有可旋转独立制动齿轮来实现,一般被称为起动齿轮。
2. 润滑系统稳定性润滑系统的稳定性是涡轴发动机可靠性的重要保障之一。
当发动机启动后,润滑系统需要能够快速达到稳态工作状态,同时保证运行时油压和油温的稳定且在可靠值范围内。
在高温、高压和高速的环境下,润滑油在液动力学方面会发生一系列复杂的流动现象,如混泡、脱泡、气泡等。
这些现象会影响油液的流量、油压和油温分布等参数,从而影响整个润滑系统的稳定工作。
为了保证润滑系统的稳定性,需要在飞机设计和制造过程中,选用稳定性较好的润滑油和合理设计润滑系统的结构和参数。
同时,在运行维护过程中,需要定期检查润滑系统的运行状态和油液的质量、量等参数。
基于Bow-tie模型的发动机空中停车事故分析与预防
1.1 空中停车(In Flight Shut-Down,IFSD) 航空安全事故中最为典型的是发动机空中停
车。空中停车事故发生的概率虽然不高,但是一旦 发生所造成的后果却是不可小觑。因此,本文以发 动机空中停车为顶事件进行故障分析。 1.2 空中停车故障树
对近年航空事故中空中停车事故报告进行梳 理分析,统计分析造成空中停车事故发生的原因, 构建了发动机空中停车这一航空典型事故故障树。
SUN Chao1,WANG Ying1,CUI Li-jie1,ZHANG Ling2 (1.School of Equipment Management & Safety Engineering,A ir Force Engineering University,Xi’an 710051,China;
Vol. 42,No. 1 Jan,2017
文章编号:1002-0640(2017)01-0027-05
火力与指挥控制 Fire Control & Command Control
第 42 卷 第 1 期 2017 年 1 月
基于 Bow-tie 模型的发动机空中停车事故分析与预防 *
孙 超 1,王 瑛 1,崔利杰 1,张 羚 2 (1.空军工程大学装备管理与安全工程学院,西安 710051;2.空军工程大学信息与导航学院,西安 710051)
J. Miyano[1]针对 IFSD 的再启动进行分析测试, 为 降 低 IFSD 带 来 的 损 失 提 供 理 论 依 据 ;Roger P.
Tokars 等[2]针对发动机传感器系统故障设计了自 动化诊断系统,该系统对于降低 IFSD 故障率有很 好的作用;Liu 等[3]在大数据视角下,运用灰色关联 度分析了 IFSD 的危险源;唐海军等[4]运用有限元 法对 IFSD 进行了失效分析,分解调查和实验剖析 找出了事件的本质起因。侯金丽等[ 5]利用模糊故障 树分析法和因子化分析法研究发动机关键部件的 失效模式,并探讨了 IFSD 的主要原因;费胜巍等[6] 基于“结构 FMEA”的诊断模型
某型航空发动机空中降转故障分析
肖强 (9 8 , , 工程师 , 16 )女 高级 从事航 空发动机控制系统调节附件设计T作。
收稿 日期 :0 10 — 5 2 1— 6 1
fc o s a ay e y e a g n h u ls p l h r c e i i o llfo e ua o . T e a t rwa n l z d b h n ig t e f e u p y c aa t r t tf e lw r g lt r h sc i e a g f r l v n e in p rmee s fr t e c p u e a s mb y i t e O e a p o ( o h n e o e e a t d sg aa tr o h a s l s e l s h C l p r a。 f r h
原 因之 一 。
耋 褰 一 一
( )海平 面军用状态 a ( )高空军, 状态 b } 丰 j
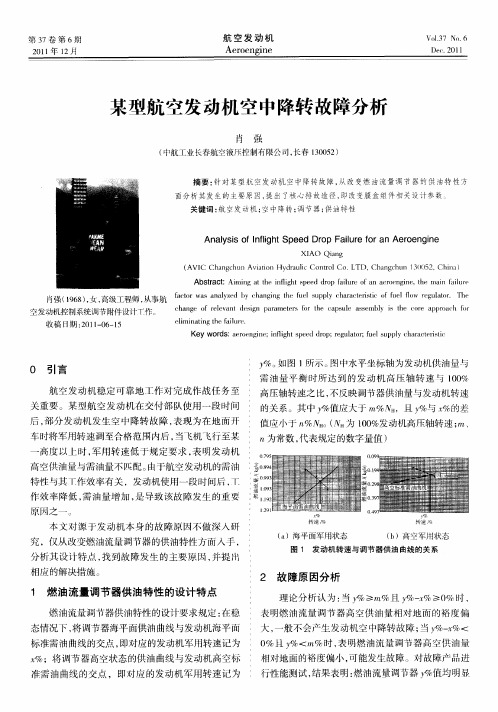
图 1 发 动机 转 速 与 调 节 器 供 油 曲线 的关 系
本文对源于发动机本身的故障原 因不做深入研
究 ,仅 从改 变燃 油流量 调 节器 的供 油特性 方 面人 手 ,
分析其设计特点 , 找到故障发生的主要原 因, 并提
的关系。其中 y 值应大于 m % %N ,且 y %与 %的差
值应 小于 n %N 为 10 。( 0%发动 机高 压轴转 速 ; m、
后, 部分发动机发生空 中降转故 障, 表现为在地面开 车时将军用转速调至合格范同内后 , 当飞机飞行至某
一
n 为常数 , 代表规定故途径 , 提 即改变膜盒组件相关设计参 数. .
关键 词 : 空 发 动机 ; 中降 转 ; 节 器 ; 油 特 性 航 空 调 供
某型发动机自动停车分析

某型发动机自动停车分析
孙护国;曾义伦;叶斌;刘少杰
【期刊名称】《中国设备工程》
【年(卷),期】2017(0)1
【摘要】某型发动机多次在起动成功后出现发动机自动停车.本文结合自动停车时的现象,分析了导致发动机自动停车的条件.以及放气活门的工作原理,结合放气活门的工作情况,找出了引起该故障的原因,并给出了故障排除方法.
【总页数】2页(P178-179)
【作者】孙护国;曾义伦;叶斌;刘少杰
【作者单位】海军航空工程学院青岛校区,山东青岛 266041;中国人民解放军92074部队,浙江宁波315021;海军航空工程学院青岛校区,山东青岛 266041;海军航空工程学院青岛校区,山东青岛 266041
【正文语种】中文
【中图分类】V263.6
【相关文献】
1.基于模糊诊断理论的航空发动机自动停车故障原因的分析
2.某型涡轴发动机自动停车故障分析研究
3.“黑鹰”直升机发动机自动停车故障分析
4.某型发动机飞行试验喘振故障分析
——兼论其对商用大涵道比涡扇发动机研制过程的启示5.某型发动机飞行试验喘振故障分析——兼论其对商用大涵道比涡扇发动机研制过程的启示
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Bow-tie模型的发动机空中停车事故分析与预防
基于Bow-tie模型的发动机空中停车事故分析与预防
孙超;王瑛;崔利杰;张羚
【期刊名称】《火力与指挥控制》
【年(卷),期】2017(042)001
【摘要】发动机空中停车是航空事故主要致因之一.首先,通过数据梳理和分析,构建发动机空中停车故障树,结合重要度分析理论,求解各基本事件的重要度,得到造成发动机空中停车事件的最薄弱环节——供油系统故障.基于Bow-tie理论,构建发动机供油系统Bow-tie模型,直观地显示了该故障产生的根本原因和可能导致的后果,进而提出了预防该故障发生的对策建议,达到降低发动机空中停车事故概率的目的.【总页数】5页(P27-31)
【作者】孙超;王瑛;崔利杰;张羚
【作者单位】空军工程大学装备管理与安全工程学院,西安 710051;空军工程大学装备管理与安全工程学院,西安 710051;空军工程大学装备管理与安全工程学院,西安 710051;空军工程大学信息与导航学院,西安 710051
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于模糊Bow-tie模型的煤矿顶板事故风险分析 [J], 佟瑞鹏;谢贝贝
2.基于Bow-tie图与水力计算模型对城镇燃气管网泄漏事故后果评价的研究 [J], 姜璐;李志宏;任飞
3.基于Bow-Tie事故模型的军机适航条款选取方法 [J], 崔利杰;丁野;孙超;任博
4.基于Bow-tie模型的大件运输事故风险分析 [J], 闵丹
5.基于Bow-tie模型的复杂事故场景化设计与保护层分析 [J], 王海清;刘美晨;徐慧敏;张英光
因版权原因,仅展示原文概要,查看原文内容请购买。
厦航关于7月16日B5603飞机右发空中停车事件调查报告
厦航关于7月16日B-5603飞机右发空中停车事件的调查报告2016年7月16日,厦航宁士程机组驾驶B-5603飞机执行MF8253武汉-兰州航班,在巡航阶段右发出现发动机失效(ENG FAIL)信息,发动机自动停车。
机组判断右发出现故障,执行检查单关闭右发,备降西安。
现将事件调查情况报告如下:一、事件经过7月16日,厦航宁士程机组(机长:宁士程,副驾驶:万福宝)驾驶B737-800型B-5603飞机执行MF8253武汉-兰州航班,飞机11:03从武汉起飞。
12:15,飞机在长武至静宁的航路上,高度约7800米时,自动油门脱开,右发N1、N2转速下降,燃油流量降为零,出现ENG FAIL 警戒信息,飞机轻微横滚,机组判断右发出现故障自动停车,随后执行发动机失效或停车检查单,按检查单关闭右发。
此时,飞机距西安机场较近,机组决定备降西安。
12:38,飞机在西安安全落地。
公司得知消息后,立即进行航班调整,安排B-5791飞机调机前往西安执行后续MF8253西安-兰州段,并对每位旅客进行相应的经济赔偿,由于现场解释及后续措施到位,本次航班165位旅客均较为配合,未发生群体性事件。
二、事件调查接获事件报告后,航安部立即将事件信息报告公司领导、民航陕西监管局、厦门监管局、华东管理局航安办、南航。
根据公司领导指示,航空安全部、飞行部、飞机维修工程部领导、调查人员及机务工程师当天下午乘坐调机MF8299/B5791前往西安进行事件调查及飞机排故。
(一)机组资质机长宁士程,男,一类机长,持有航线运输驾驶员执照,执照编号:231005####6,总飞行时间6052:08小时,总经历时间6094:04小时,其中机长时间2352:09小时,最近一次熟练检查时间:2016年3月6日。
副驾驶万福宝,男,五类副驾驶,持有商用驾驶员执照,执照编号:3201####450,总飞行时间1098:14小时,总经历时间831:57小时,最近一次熟练检查时间:2016年3月6日。
无人机故障事件分析报告
无人机故障事件分析报告引言:无人机作为一种飞行器,具有广泛的应用领域,如军事侦察、物流配送、航拍摄影等。
然而,无人机故障事件时有发生,给人们的生命财产安全带来了一定威胁。
本报告针对无人机故障事件展开分析,探讨故障发生的原因、应对措施以及未来的发展方向,旨在提高无人机的安全性和稳定性。
一、事件概述:无人机故障事件指的是在飞行过程中出现不可预测的意外情况,从而导致无人机的失控或系统故障。
以下是两个重要的无人机故障事件案例。
案例一:2018年某城市举办活动时,一架民用无人机从二楼高度坠落,砸中人群,造成多人受伤。
案例二:2019年一次航拍任务中,无人机突然失控,撞上高压电线杆,电线杆及无人机坠落引发大火,直接造成财产损失和环境污染。
二、故障原因分析:无人机故障事件的原因多种多样,主要包括以下几个方面。
1. 人为操控错误:无人机操控需要经过专业培训,但有些用户缺乏必要的操作技巧和知识。
例如,操作者误操作、飞行过程中失去控制能力等。
2. 电池故障:无人机的电池是其重要的动力来源,故障电池可能导致无法正常起飞、飞行中电量不足等问题。
3. 通信干扰:无人机与遥控器之间的通信是保证正常飞行的基础,但存在电磁干扰、信号丢失等问题,导致失控。
4. 设备故障:包括无人机传感器故障、电机故障等,这些故障可能导致无人机无法正确判断环境、飞行不稳定等。
5. 外界干扰:如强风、雷电等恶劣气候条件,会对无人机的稳定性产生不利影响。
三、应对措施:为了降低无人机故障事件的发生率,采取以下应对措施是至关重要的。
1. 人员合格培训:无人机操作者应接受系统的培训和考核,确保其具备正确的操控技能和知识,减少人为操控错误。
2. 质量监管与维护:无人机制造商和服务提供商应建立质量监管机制,严格把关无人机设备制造和维护过程中的质量问题,降低设备故障率。
3. 技术改进和创新:不断提升无人机的稳定性、抗干扰能力以及智能化程度,通过引入新技术提高无人机的安全性和可靠性。
某型发动机停车惯性运转时间短故障分析
某型发动机停车惯性运转时间短故障分析【内容摘要】通过对一起发动机停车过程中出现的因液压泵卸荷问题导致发动机停车惯性运转时间短的典型故障,介绍了液压泵功能以及卸荷工作原理,利用故障树分析法全面的分析描述了故障原因和详细的排故过程。
关键词:停车惯性卸荷0引言飞机发动机惯性运转是指发动机停车后通过压气机及涡轮叶片的继续转动,直至完全停止的工作过程。
某型发动机装机后惯性运转时间为发动机停车过程中发动机压气机转速下降至8%时开始计时,直至螺旋桨完全停止转动为止的时间。
发动机试车时对于涡轮后产生的高温热气,通过引自发动机增压空气对高温部件进行冷却;而发动机停车后冷却,主要依靠发动机压气机及涡轮惯性运转,进一步将发动机内部高温热气排出机外。
因此,发动机惯性运转时间通常作为发动机工作状况是否正常的一项考核参数。
若发动机惯性运转时间短,则将不利于发动机散热冷却,易导致发动机过热,造成发动机内部机件损伤。
发动机工作时为飞机提供飞行动力,同时驱动液压泵、发电机为飞机相关用户系统提供液压能源、电能,以及通过引气口为飞机提供气源。
本文主要针对一起发动机停车过程中负载异常,造成发动机停车惯性运转时间低于指标值的典型故障进行分析。
2液压泵功能及卸荷工作简介液压泵在液压系统中属于能源转换装置,将发动机(电动机)等传递的机械能转变为液压能源,为系统提供一定流量和压力油液的动力元件。
斜盘式轴向柱塞泵是应用较为广泛的液压泵,液压泵工作流量大小受泵斜盘角度控制。
在泵内设计补偿活门用于感受泵的输出压力;当输出压力达到预定值(由弹簧预紧力确定)时,补偿活门将泵出口压力油供向斜盘作动筒,使斜盘倾角减小,从而使泵排油量较小,起到变量调节作用。
当斜盘角度调为零时,输出流量亦为零,油泵功率处于消耗功率最小卸荷状态。
泵内还有一个人工卸压活门,用于油泵的人工关断,通过卸压电磁活门实现卸荷。
结合液压泵工作原理分析,本型发动机在起动阶段、停车时的卸荷主要受卸荷电磁活门控制,工作机理为卸荷电磁活门通电打开打开,压力油接通补偿活门左侧大活塞面,以用较小的压力克服补偿活门弹簧力,将压力油引导斜盘作动筒,推动斜盘组件,直至斜盘倾角接近零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
某型无人机涡喷发动机空中停车故障分析陈慧杰(中国人民解放军92419部队,辽宁兴城 125106)作者简介:陈慧杰(1983—),男,硕士,主要从事无人机动力系统研究。
本文引用格式:陈慧杰.某型无人机涡喷发动机空中停车故障分析[J].兵器装备工程学报,2017(7):78-81.Citation:format:CHEN Huijie.Failure Analysis of a Turbo-Jet Engine of UAV Power off During Flight[J].Journal of Ordnance Equipment Engineering,2017(7):78-81.摘要:为解决某型无人机空中停车问题,建立了空中停车故障树。
通过对微型涡喷发动机空中停车故障的分析,给出了故障分析与定位的过程,提出相应改进措施,并通过多次实际飞行对改进措施进行验证。
结果表明,无人机空中停车主要由于进气畸变引起。
可为微型涡喷发动机研究和应用提供参考。
关键词:无人机;涡喷发动机;故障树;稳定裕度微型涡喷发动机(micro turbine engine, MTE)是指推力小于100daN的涡喷发动机[1]。
其具有推重比高、耗油率低、结构简单、造价低廉、易于维护与存贮等优点[2]。
随着巡航导弹和无人机向小型化发展,微型涡喷发动机作为可选动力装置之一,倍受各国关注。
当前国内外无人机用微型涡喷发动机的发展方向是高推重比、低耗油率和低成本,尤其是低成本要求,必须贯彻到发动机研制的每一步。
国外在微型涡喷发动机研制方面开展了大量研究,特别是以捷克的TJ100系列、荷兰Hope80型等在无人机上得到了广泛应用[3]。
目前国内也在微型涡喷发动机研制方面加大投入,几种微型涡喷发动机已经在无人机上大量应用。
某型无人机以单台微型涡喷发动机为动力,采用背部S型进气道,在飞行过程中,多次出现空中停车故障,研究人员在对所有可能故障原因进行全面分析的基础上将故障原因定位在发动机进气不稳,在不改变气动外形和发动机特性前提下,提出了改进措施,有效避免了故障发生。
1 故障现象描述某型无人机内场调试、飞行前测试均正常,起飞后爬升改平飞阶段,遥测数据显示发动机转速快速下降,现场判断发动机熄火停车,通过观察停车前的姿态和转速变化可知,飞机熄火都是发生在飞机爬升改平飞状态时,并且飞机都是处于三维程控状态飞行。
图1给出了无人机熄火前后俯仰姿态、飞行高度及发动机转速的变化情况,其中发动机转速单位为每分钟万转。
在无人机爬升过程中转速自动联动提高一个挡位从78 000 r/min升高到83 000 r/min,当无人机将要到达预定高度时姿态开始改平飞,此时发动机转速开始下降,最终熄火。
图1 发动机熄火前后姿态和转速变化曲线2 故障定位无人机空中停车故障树如图2,故障分析如下:对回收无人机记录数据进行检查,发现飞控系统未给出会导致发动机停车的指令,机上通讯及供电等均正常。
因此无人机熄火故障可以排除无人机其他系统异常引起。
动力系统主要由发动机本体、控制系统、燃油系统、进气系统组成。
其中,燃油系统包括油箱、燃油泵及各连接管路。
气体经无人机进气道进入发动机本体,经压缩变成高压、高温气体进入发动机燃烧室,与由燃油系统供给的燃油混合、燃烧,最终通过燃气高速排入大气产生反作用力,实现推动无人机前进。
图2 空中停车故障树按熄火故障无人机原始状态,对发动机本体进行检查,均正常,可以排除发动机机体故障。
通过分析发动机空中停车时刻的遥测数据,发现在停车时刻后,排气温度、燃烧室压力、转速均在同一时刻下降,ECU发现转速下降及时做出反应使油门值加大,调节油泵的驱动电压上升,力求使发动机加速,这说明ECU的控制逻辑是正确的,运行正常。
采用熄火停车故障无人机,保持原有状态,进行控制匹配试车,运行正常,说明电控系统硬件和燃油系统工作正常。
进气道总压恢复系数σ和畸变指数DC60两个参数可衡量进气道的设计好坏[4]。
一般航空涡喷发动机进气道设计应保证σ大于0.97、DC60小于0.3[5]。
该型无人机进发匹配点进气道的总压恢复系数和畸变指数满足设计要求。
可以排除进发匹配问题。
该型无人机在总体布局设计时选择了背部进气的进气道形式,这是由于该型无人机的大长径比的机体形式决定不能采用头部进气,而且背部进气和腹部进气的抗侧滑能力优于两侧进气,再考虑到两侧进气对机身空间的占用率较大,所以不选用两侧进气形式。
背部进气的主要缺点在于大迎角飞行状态下,机身对进气道遮挡明显。
考虑到该型无人机平飞设计点为小迎角状态,而且没有机动性要求,背部进气可满足飞行包线范围的使用要求。
进气稳定性主要受发动机自身的稳定裕度和外界的进气变化两方面的影响。
该型无人机在爬升改平飞时发动机转速较高,稳定裕度较低;同时,爬升改平飞时的过渡时间为0.5 s,姿态迎角波动较大,会引起发动机来流波动,以上两点均可能导致发动机熄火。
结合以上分析将故障定位在发动机进气不稳。
造成进气不稳的原因有两点:一是发动机爬升改平飞时稳定裕度降低,二是爬升改平飞时进气畸变较大。
3 故障原因分析3.1 转速提高稳定裕度降低发动机工作稳定性评定过程需要利用稳定裕度,定量描述发动机在不同转速下的工作点与稳定边界的差距。
为了确定稳定裕度,必须明确发动机的稳定工作线[6]。
稳定工作边线由压气机的气动不稳定性决定。
稳定裕度的计算形式可以分为两种:等换算流量稳定裕度和等换算转速稳定裕度。
美国的ARP-1420中采用等换算流量条件下的稳定裕度[7]我国军标规定稳定裕度为等换算流量条件下的稳定裕度[8]。
但是由于压气机和发动机试验过程是按等换算转速,通常采用等换算转速条件下的稳定裕度。
等换算转速稳定裕度义为其中为压气机稳定边界线上的增压比; G s为相同换算转速下压气机稳定边界线上的换算空气质量流量;为压气机在设计点上的增压比; G d为为相同换算转速下压气机设计点上的换算空气质量流量。
一般航空涡喷发动机以上述方法定义的稳定裕度为15%~25%[9]。
根据稳定裕度定义可计算出该型涡喷发动机在各个转速下的稳定裕度,如图3所示。
图中横坐标相对转速定义为:实际转速与最大转速的比值。
经计算,78 000 r/min时的稳定裕度为32.3%,83 000r/min时的稳定裕度为25.1%,较78 000 r/min时小了近7个百分点,且在稳定裕度经验值边界上。
图3 不同转速下稳定裕度与改平飞挡位≥83 000 r/min相比较,≤78 000 r/min时的转速波动小,改平飞过程中发动机工作比较平稳,且熄火现象均在改平飞挡位≥83 000 r/min时发生。
无人机在≤78 000 r/min挡位改平飞时,虽然存在进气畸变导致稳定裕度降低,但该挡位的稳定裕度较宽,即抗畸变能力较强。
即使降低但仍在稳定边界内,发动机没有进入不稳定区域,不会出现熄火现象;而在≥83 000 r/min挡位改平飞时,此时的安全裕度比78 000 r/min时低,抗畸变能力较弱。
当出现畸变后,稳定裕度下降,发动机工作点接近不稳定边界的可能性增大。
在这种情况下任何细微的变化(如天气、操作方法等)都会导致发动机进入不稳定状态,出现喘振甚至熄火。
所以熄火现象全部出现在改平飞挡位较高(≥83 000 r/min)的时候。
因此无人机在改平飞时发动机转速应控制在 83 000 r/min以下,但是过低的转速产生的推力不足以保证飞机的爬升性能,因此要从满足飞行要求和控制熄火两方面综合考虑。
3.2 姿态变化影响发动机熄火停车均发生在无人机爬升改平飞阶段,当无人机爬升改平飞时,在无人机背部靠近机头附近可能会出现机头涡,当机头涡向后发展过程中,受到大气环境的影响,可能进入进气道导致进气流场畸变,在压气机内部形成局部分离,压气机旋转失速。
当旋转失速发展到一定程度时,造成发动机内气流轴向振荡,即喘振,严重时可能导致发动机熄火。
图4给出了不同迎角下进气道出口马赫数云图。
结果显示随着迎角变化,进气品质下降,产生隐患。
4 改进措施及验证4.1 柔化出舵时间原设计爬升改平飞柔化时间为0.5 s。
从图5可以看出,此参数下爬升改平飞过程高度波动较大。
同时飞机迎角振荡,进而导致发动机进气品质降低。
通过增加柔化时间可降低此趋势。
分析表明,柔化时间选择大于2 s可有效降低高度波动,而选择3 s以上,飞机实际改平飞高度会超出爬升改平飞指令高度60 m以上,不能满足飞机高度操纵控制精度要求。
图4 不同迎角进气道出口马赫数云图图5 柔化出舵曲线从以上分析可知造成空中人机爬升改平飞时俯仰姿态变化速率越低,引起的发动机进气扰动越小。
因此,采取降低无人机爬升改平飞时俯仰姿态变化速率,柔化出舵的控制策略可明显改善进气品质并保证发动机稳定工作。
但另一方面,柔化出舵时间太长会引起高度过冲,增加飞机操纵难度。
同时考虑飞行任务需要、安全性,爬升改平飞时出舵柔化时间应进行设计优化,选择更为合理的参数。
经过仿真验证,将出舵持续时间由之前0.5 s 增加到2 s;爬升时发动机挡位控制在74 000~78 000 r/min左右,使来流进气满足发动机抗畸变指标的要求,避免姿态短时间的剧烈变化引起发动机进气的剧烈扰动,可有效防止此问题的发生。
4.2 改变联动策略如图6所示,三维程控挡位联动规则为:当前高度比设定高度高,超过60 m,发动机转速自动变为70 000 r/min。
当前气压高度比设定高度低,超过100 m,发动机转速自动变为78 000 r/min。
当前高度在设定高度上60 m到下100 m之间时,发动机转速自动变为74 000 r/min。
图6 转速高度联动示意图稳定裕度较低容易造成发动机熄火现象,对三维程控挡位联动进行改进。
爬升挡转速改为平飞挡转速的高度门限由60 m改为160 m,爬升挡转速由83 000 r/min改为78 000 r/min,平飞挡转速由78 000 r/min改为74 000 r/min。
此次改进降低了发动机爬升改平飞转速,74 000 r/min时的转速波动小,改平飞过程中发动机工作比较平稳,该挡位的稳定裕度较宽,抗畸变能力较强。
增加了爬升挡转速改为平飞挡转速的高度门限,目的为保证在俯仰姿态稳定情况下进行发动机转速变化。
当发动机转速变化完后飞机进入爬升改平飞阶段。
避免无人机姿态变化时进气扰动进入发动机造成发动机熄火。
5 结束语通过采取柔化出舵时间和改变联动策略,在后续飞行中未出现发动机空中停车问题,在爬升改平飞的过程中,发动机转速波动明显减小,说明故障定位准确,措施得当,具有一定的借鉴意义。