一种结合图像特征的三维模型变化检测方法
结合足迹和相位信息的SAR高层建筑三维重建
结合足迹和相位信息的SAR高层建筑三维重建目录一、内容概述...............................................21.1 SAR技术在高层建筑三维重建中的应用......................2 1.2 足迹与相位信息结合的重要性.............................31.3 研究目的及价值.........................................4二、SAR技术与高层建筑三维重建概述..........................52.1 SAR技术基本原理........................................6 2.2 高层建筑三维重建技术流程...............................72.3 国内外研究现状及发展趋势...............................8三、足迹信息提取与分析.....................................93.1 足迹信息来源及特点....................................10 3.2 足迹信息提取方法......................................113.3 足迹信息分析与应用....................................12四、相位信息获取与处理技术研究............................144.1 相位信息来源及特点....................................15 4.2 相位信息获取方法......................................164.3 相位信息处理与分析流程................................17五、结合足迹和相位信息的SAR高层建筑三维重建方法...........185.1 数据预处理............................................205.2 三维建模流程..........................................215.3 模型优化与精度评估....................................22六、实验与分析............................................246.1 实验数据准备..........................................246.2 实验方案设计..........................................256.3 实验结果分析..........................................26七、结论与展望............................................277.1 研究成果总结..........................................287.2 后续研究方向及建议....................................29一、内容概述本文档旨在详细介绍一种基于足迹和相位信息的SAR高层建筑三维重建方法。
光学检测的综述
光学检测的综述光学检测的综述摘要随着科学技术和⼯业的发展,测量检测技术在⾃动化⽣产、质量控制、机器⼈视觉、反求⼯程、CAD/CAM以及⽣物医学⼯程等⽅⾯的应⽤⽇益重要。
传统的接触式测量技术存在测量⼒、测量时间长、需进⾏测头半径的补偿、不能测量弹性或脆性材料等局限性,因⽽不能满⾜现代⼯业发展的需要。
近年来由于光学⾮接触式测量技术克服了上述缺陷,其⾮接触、⾼效率、⾼准确度和易于实现⾃动化的特点,成为近年来测量技术研究的热点。
本⽂介绍了多种基于各种测量原理的光学检测⽅法。
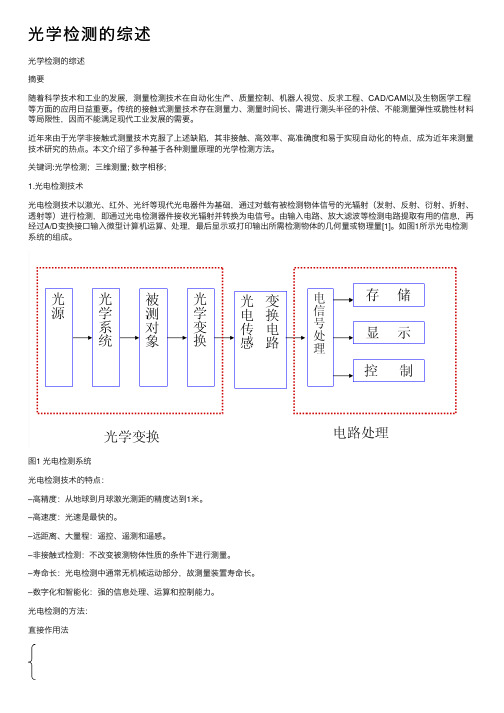
关键词:光学检测;三维测量; 数字相移;1.光电检测技术光电检测技术以激光、红外、光纤等现代光电器件为基础,通过对载有被检测物体信号的光辐射(发射、反射、衍射、折射、透射等)进⾏检测,即通过光电检测器件接收光辐射并转换为电信号。
由输⼊电路、放⼤滤波等检测电路提取有⽤的信息,再经过A/D变换接⼝输⼊微型计算机运算、处理,最后显⽰或打印输出所需检测物体的⼏何量或物理量[1]。
如图1所⽰光电检测系统的组成。
图1 光电检测系统光电检测技术的特点:–⾼精度:从地球到⽉球激光测距的精度达到1⽶。
–⾼速度:光速是最快的。
–远距离、⼤量程:遥控、遥测和遥感。
–⾮接触式检测:不改变被测物体性质的条件下进⾏测量。
–寿命长:光电检测中通常⽆机械运动部分,故测量装置寿命长。
–数字化和智能化:强的信息处理、运算和控制能⼒。
光电检测的⽅法:直接作⽤法差动测量法补偿测量法脉冲测量法光电检测系统◆主动系统/被动系统(按信息光源分)–主动系统通过信息调制光源,或者光源发射的光受被测物体调制。
如图2所⽰图2 主动系统的组成框图–被动系统光信号来⾃被测物体的⾃发辐射。
如图3所⽰图3 被动系统的组成框图◆红外系统/可见光系统(按光源波长分)[2]–红外系统多⽤于军事,有⼤⽓窗⼝,需要特种探测器。
–可见光系统多⽤于民⽤◆点探测/⾯探测系统(按接受系统分)–⽤单元探测器接受⽬标的总辐射功率。
基于差异增强和双注意力Transformer_的遥感图像变化检测

doi:10.3969/j.issn.1003-3106.2024.01.030引用格式:张青月,赵杰.基于差异增强和双注意力Transformer的遥感图像变化检测[J].无线电工程,2024,54(1):230-238.[ZHANGQingyue,ZHAOJie.RemoteSensingImageChangeDetectionBasedonDifferenceEnhancementandDualAttentionTransformer[J].RadioEngineering,2024,54(1):230-238.]基于差异增强和双注意力Transformer的遥感图像变化检测张青月1,赵 杰2(1.国网新源控股有限公司检修分公司,北京100067;2.北京大学大数据分析与应用技术国家工程实验室,北京100871)摘 要:由于遥感场景中物体的复杂性,光照变化和配准误差都会影响不同时间拍摄的2个图像中目标的变化,探索不同像素之间的关系和更强大识别能力的卷积神经网络可以提高双时相遥感图像变化检测的性能。
提出一个基于差异增强的和双注意力机制的Transformer神经网络模型,在孪生网络架构中的特征提取部分引入ResNeXt单元,在不增加参数复杂度的前提下提高准确率;将分层结构的Transformer编码-解码器与通道和空间双注意力模块相结合,获得更大的感受野和更强的上下文塑造能力;该网络还关注双时相图像的差异化特征,通过引入差异增强模块对每个像素进行加权,选择性地对特征进行聚合,最终生成具有高精度的遥感图像变化特征图。
通过在变化检测基准数据集LEVIR CD和DSIFN上进行实验,所提方法对不同建筑物、道路和植被变化情况的检测效果有很大提升,与现有检测模型相比,该方法在F1、IoU和OA这3个评价指标上均好于最好结果。
关键词:遥感图像;变化检测;Transformer;双注意力机制;差异增强中图分类号:TP391文献标志码:A开放科学(资源服务)标识码(OSID):文章编号:1003-3106(2024)01-0230-09RemoteSensingImageChangeDetectionBasedonDifferenceEnhancementandDualAttentionTransformerZHANGQingyue1,ZHAOJie2(1.StateGridXinyuanMaintenanceBranchCompany,Beijing100067,China;2.NationalEngineeringLaboratoryforBigDataAnalysisandApplications,PekingUniversity,Beijing100871,China)Abstract:Duetothecomplexityofobjectsintheremotesensingscene,illuminationchangesandregistrationerrorswillaffectthechangesoftheobjectintwoimagestakenatdifferenttime.Exploringtherelationshipbetweendifferentpixelsandconvolutionalneuralnetworkswithmorepowerfulrecognitioncapabilitiescanimprovebi temporalperformanceofchangedetectioninremotesensingimages.AnovelTransformerneuralnetworkmodelisproposedbasedondifferentialenhancementandmulti attentionmechanism.TheResNeXtunitisintroducedintothefeatureextractionpartofthesiamesenetworkarchitecturetoimprovetheaccuracywithoutincreasingthecomplexityofparameters.Thetransformerencoder decoderwithhierarchicalstructureiscombinedwithchannelandspatialdualattentionmodulestoobtainalargerreceptivefieldandstrongercontextshapingability.Inaddition,thenetworkalsopaysattentiontothedifferentiatedfeaturesofbi temporalimages,weightseachpixelbyintroducingadifferenceenhancementmodule,selectivelyaggregatesthefeatures,andfinallygeneratesahigh precisionremotesensingimagechangefeaturemap.ThroughexperimentsonthechangedetectionbenchmarkdatasetLEVIR CDandDSIFN,it’sshownthatthedetectioneffectofdifferentbuildings,roadsandvegetationchangesisgreatlyimproved.Comparedwithexistingmodels,thismethodisbetterthanthebestresultsinF1,IoUandOA.Keywords:remotesensingimage;changedetection;Transformer;dualattentionmechanism;differenceenhancement收稿日期:2023-09-15基金项目:国家重点研发计划资助(2018YFC0910700);国家自然科学基金(81801778)FoundationItem:NationalKeyR&DProgramofChina(2018YFC0910700);NationalNaturalScienceFoundationofChina(81801778)工程与应用0 引言遥感图像变化检测是一项具有挑战性的任务,其目的是基于双时相或多时相遥感图像自动检测同一地理区域内建筑物或土地利用的变化。
基于图像处理技术的隧道病害检测与评估方法

基于图像处理技术的隧道病害检测与评估方法在现代交通体系中,隧道作为重要的基础设施,其安全性和可靠性至关重要。
然而,由于隧道所处环境的复杂性和长期使用的影响,隧道容易出现各种病害,如裂缝、渗漏水、衬砌剥落等。
这些病害如果不能及时发现和处理,可能会导致严重的安全事故,影响隧道的正常使用。
因此,研究高效、准确的隧道病害检测与评估方法具有重要的现实意义。
图像处理技术作为一种非接触式的检测手段,具有快速、准确、自动化程度高等优点,为隧道病害的检测与评估提供了新的思路和方法。
一、图像处理技术在隧道病害检测中的应用原理图像处理技术主要是通过对采集到的隧道图像进行分析和处理,提取出病害的特征信息,从而实现病害的检测和识别。
其基本流程包括图像采集、图像预处理、特征提取和病害识别四个环节。
图像采集是整个流程的第一步,通常采用相机、摄像机等设备对隧道进行拍摄,获取隧道表面的图像。
为了保证图像的质量,需要选择合适的拍摄角度、距离和光照条件,并尽量减少拍摄过程中的抖动和噪声。
图像预处理是对采集到的原始图像进行去噪、增强、几何校正等操作,以提高图像的质量和清晰度,为后续的特征提取和病害识别打下基础。
常用的预处理方法包括中值滤波、均值滤波、直方图均衡化、仿射变换等。
特征提取是从预处理后的图像中提取出能够反映病害特征的信息,如形状、大小、颜色、纹理等。
常用的特征提取方法包括边缘检测、区域分割、特征点提取等。
病害识别是根据提取到的特征信息,采用模式识别、机器学习等方法对病害进行分类和识别。
常用的病害识别方法包括支持向量机、决策树、神经网络等。
二、隧道病害的类型及特征隧道病害的类型多种多样,常见的有裂缝、渗漏水、衬砌剥落、空洞等。
不同类型的病害具有不同的特征,需要采用不同的检测方法和评估指标。
裂缝是隧道中最常见的病害之一,其特征主要表现为线性的、宽窄不一的裂缝痕迹。
根据裂缝的宽度和长度,可以将其分为微观裂缝、宏观裂缝等不同类型。
裂缝的存在会削弱隧道结构的承载能力,严重时可能导致隧道坍塌。
基于特征的点云配准方法

基于特征的点云配准方法1.引言1.1 概述点云配准是计算机视觉和机器人领域中一个重要的问题,它涉及到将多个点云数据集对齐到同一个坐标系下。
点云配准的目标是找到最优的刚体变换,使得不同点云之间的对应点能够对齐,从而进行后续的分析和处理。
在过去的几十年里,点云配准一直是一个受到广泛关注的研究热点。
它在三维重建、目标识别和机器人导航等领域具有广泛的应用。
然而,由于数据量大、噪声干扰和姿态变化等挑战,点云配准任务仍然具有一定的挑战性。
为了解决这个问题,研究者们提出了许多不同的点云配准方法。
其中基于特征的点云配准方法是一种常用的方法。
这种方法利用点云中的特征进行匹配和对齐,以实现点云的配准。
特征提取方法用于从点云中提取具有判别性和鲁棒性的特征描述子,而特征匹配方法则用于准确地匹配不同点云中的特征点。
本文将重点讨论基于特征的点云配准方法。
首先,我们将介绍一些常用的特征提取方法,包括描述子,这些描述子能够捕捉点云中的局部几何信息和表面特征。
然后,我们将讨论特征匹配方法,这些方法用于确定不同点云中对应的特征点。
接着,我们将介绍基于特征的点云配准方法,这些方法通过最小化特征点对之间的距离,来估计点云之间的刚体变换关系。
最后,我们将讨论点云配准的优化算法,用于进一步优化配准结果。
通过本文的研究,我们希望能够深入了解基于特征的点云配准方法在实践中的应用和挑战。
同时,我们也希望能够为点云配准算法的改进和发展提供一定的参考和借鉴。
点云配准作为一个重要的问题,它的研究和应用具有广阔的前景,有望为三维重建、机器人导航和虚拟现实等领域的发展做出重要贡献。
文章结构部分的内容如下所示:1.2 文章结构本文主要围绕基于特征的点云配准方法展开研究,通过以下几个方面进行论述和探讨。
第2节是正文的核心部分,首先介绍了特征提取方法,包括特征描述子和特征匹配。
在特征提取方法中,我们将重点介绍如何从点云数据中提取出能够描述点云特征的特征描述子,以及如何通过特征匹配来寻找匹配的特征点对。
halcon——缺陷检测常用方法总结(模板匹配(定位)+差分)
halcon——缺陷检测常⽤⽅法总结(模板匹配(定位)+差分)引⾔机器视觉中缺陷检测分为⼀下⼏种:blob分析+特征模板匹配(定位)+差分光度⽴体:特征训练测量拟合频域+空间域结合:深度学习本篇主要总结⼀下缺陷检测中的定位+差分的⽅法。
即⽤形状匹配,局部变形匹配去定位然后⽤差异模型去检测缺陷。
模板匹配(定位)+差分整体思路(形状匹配):1. 先定位模板区域后,求得模板区域的坐标,创建物品的形状模板create_shape_model,注意把模板的旋转⾓度改为rad(0)和rad(360)。
2. 匹配模板find_shape_model时,由于物品的缺陷使形状有局部的改变,所以要把MinScore设置⼩⼀点,否则匹配不到模板。
并求得匹配项的坐标。
3. 关键的⼀步,将模板区域仿射变换到匹配成功的区域。
由于差集运算是在相同的区域内作⽤的,所以必须把模板区域转换到匹配项的区域。
4. 之后求差集,根据差集部分的⾯积判断该物品是否有缺陷。
模板匹配(定位)+差分的⽅法主要⽤来检测物品损坏,凸起,破洞,缺失,以及质量检测等。
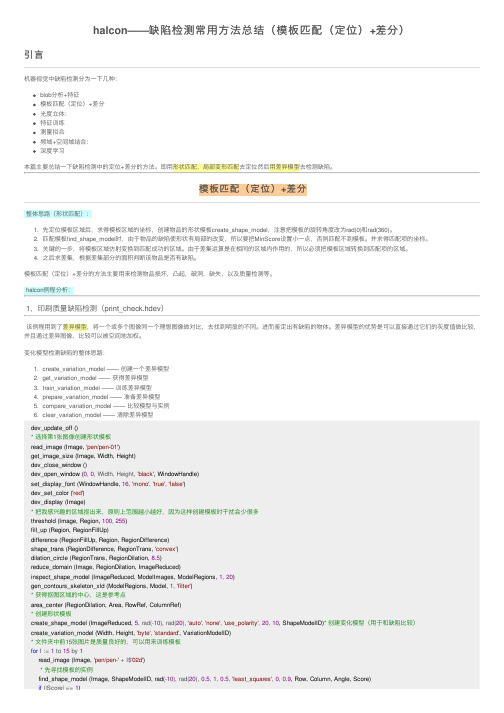
halcon例程分析:1,印刷质量缺陷检测(print_check.hdev)该例程⽤到了差异模型,将⼀个或多个图像同⼀个理想图像做对⽐,去找到明显的不同。
进⽽鉴定出有缺陷的物体。
差异模型的优势是可以直接通过它们的灰度值做⽐较,并且通过差异图像,⽐较可以被空间地加权。
变化模型检测缺陷的整体思路:1. create_variation_model —— 创建⼀个差异模型2. get_variation_model —— 获得差异模型3. train_variation_model —— 训练差异模型4. prepare_variation_model —— 准备差异模型5. compare_variation_model —— ⽐较模型与实例6. clear_variation_model —— 清除差异模型dev_update_off ()* 选择第1张图像创建形状模板read_image (Image, 'pen/pen-01')get_image_size (Image, Width, Height)dev_close_window ()dev_open_window (0, 0, Width, Height, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_set_color ('red')dev_display (Image)* 把我感兴趣的区域抠出来,原则上范围越⼩越好,因为这样创建模板时⼲扰会少很多threshold (Image, Region, 100, 255)fill_up (Region, RegionFillUp)difference (RegionFillUp, Region, RegionDifference)shape_trans (RegionDifference, RegionTrans, 'convex')dilation_circle (RegionTrans, RegionDilation, 8.5)reduce_domain (Image, RegionDilation, ImageReduced)inspect_shape_model (ImageReduced, ModelImages, ModelRegions, 1, 20)gen_contours_skeleton_xld (ModelRegions, Model, 1, 'filter')* 获得抠图区域的中⼼,这是参考点area_center (RegionDilation, Area, RowRef, ColumnRef)* 创建形状模板create_shape_model (ImageReduced, 5, rad(-10), rad(20), 'auto', 'none', 'use_polarity', 20, 10, ShapeModelID)* 创建变化模型(⽤于和缺陷⽐较)create_variation_model (Width, Height, 'byte', 'standard', VariationModelID)* ⽂件夹中前15张图⽚是质量良好的,可以⽤来训练模板for I := 1 to 15 by 1read_image (Image, 'pen/pen-' + I$'02d')* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score)if (|Score| == 1)if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 训练差异模型train_variation_model (ImageTrans, VariationModelID)dev_display (ImageTrans)dev_display (Model)endifendfor* 获得差异模型get_variation_model (MeanImage, VarImage, VariationModelID)* 做检测之前可以先⽤下⾯这个算⼦对可变模型进⾏设参,这是⼀个经验值,需要调试者调整prepare_variation_model (VariationModelID, 20, 3)dev_set_draw ('margin')NumImages := 30* 可变模板训练完成后,我们终于可以进⼊主题,马上对所有图像进⾏缺陷检测,思想就是差分for I := 1 to 30 by 1read_image (Image, 'pen/pen-' + I$'02d')* 要注意做差分的两幅图像分辨率相同,当然也需要通过仿射变换把待检测的图像转到与模板图像重合* 先寻找模板的实例find_shape_model (Image, ShapeModelID, rad(-10), rad(20), 0.5, 1, 0.5, 'least_squares', 0, 0.9, Row, Column, Angle, Score) if (|Score| == 1)* 使⽤仿射变换,将当前图像平移旋转到与模板图像重合,注意是当前图像转向模板图像vector_angle_to_rigid (Row, Column, Angle, RowRef, ColumnRef, 0, HomMat2D)affine_trans_image (Image, ImageTrans, HomMat2D, 'constant', 'false')* 抠图reduce_domain (ImageTrans, RegionDilation, ImageReduced)* 差分(就是检查两幅图像相减,剩下的区域就是不同的地⽅了,与模板图像不同的地⽅就是缺陷)*这⾥可不能⽤difference做差分啊,halcon为变形模板提供了专门的差分算⼦:compare_variation_modelcompare_variation_model (ImageReduced, RegionDiff, VariationModelID)connection (RegionDiff, ConnectedRegions)* 特征选择:⽤⼀些特征来判断这幅图像印刷是否有缺陷,这⾥使⽤⾯积* 其实可以考虑利⽤区域⾯积的⼤⼩来判断缺陷的严重程度,这⾥就不过多讨论了select_shape (ConnectedRegions, RegionsError, 'area', 'and', 20, 1000000)count_obj (RegionsError, NumError)dev_clear_window ()dev_display (ImageTrans)dev_set_color ('red')dev_display (RegionsError)set_tposition (WindowHandle, 20, 20)if (NumError == 0)dev_set_color ('green')write_string (WindowHandle, 'Clip OK')elsedev_set_color ('red')write_string (WindowHandle, 'Clip not OK')endifendifif (I < NumImages)disp_continue_message (WindowHandle, 'black', 'true')stop ()endifendfor* 结语:如果发现前⾯作为训练变形模板的良好图像也被判定为NG,* 可以调整prepare_variation_model参数* 或者调整select_shape特征筛选的标准相关算⼦分析:create_variation_model(创建⼀个差异模型)create_variation_model(Width, Height, Type, Mode ,ModelID)//创建⼀个ID为ModelID,宽为Width,⾼为Height,类型为Type的差异模型参数参数Mode决定了创建标准图像和相应的变化图像的⽅法。
基于空洞卷积与多尺度特征融合的室内场景单图像分段平面三维重建
传感技术学报CHINESE JOURNAL OF SENSORS AND ACTUATORS Vol.34No.3 Mar.2021第34卷第3期2021年3月Piecewise Planar3D Reconstruction for Indoor Scenes from a Single Image Based on Atrous Convolution and Multi-Scale Features Fusion*SUN Keqiang,MIAO Jun*9JIANG Ruixiang,HUANG Shizhong,ZHANG Guimei (Computer Vision Institute of Nanchang Hongkong University,Nanchang Jiangxi33Q063f China)Abstract:It is hard for pixel-level and regional-level3D reconstruction algorithms to recover details of indoor scenes due to luminous changes and lack of texture.A piecewise planar3D reconstruction method is proposed based on the convolution residual connection of the holes and the multi-scale feature fusion network.This model uses the shallow high-resolution detail features generated by the ResNet-101network with the added hole convolution to reduce the loss impact of spatial information as network structure deepens on the detail reconstruction,so that this model can learn more abundant features and by coupling positioning accuracy optimized by the fiilly connected conditional random field(CRF)with the recognition ability of deep convolutional neural network,which keeps better boundary smoothness and details・Experimental results show that the proposed method is robust to the plane prediction of indoor scenes with complex backgrounds,the plane segmentation results are accurate,and the depth prediction accuracy can reach92.27%on average.Key words:3D reconstruction of indoor scene;deep convolutional neural network;conditional random field;atrous convolution;multi-scale feature fusionEEACC:6135;6135E doi:10.3969/j.issn.l004-1699.2021.03.012基于空洞卷积与多尺度特征融合的室内场景单图像分段平面三维重建*孙克强,缪君*,江瑞祥,黄仕中,张桂梅(南昌航空大学计算机视觉研究所,江西南昌330063)摘要:受光照变化和纹理缺乏等因素的影响,基于单幅室内场景图像的像素级和区域级三维重建算法很难恢复场景结构细节。
控制点检测方法
控制点检测方法一、引言控制点检测是计算机视觉领域中的一项重要任务,其目的是在图像或视频中准确定位和识别出特定的控制点。
控制点通常是一些具有明确特征的点,可以用于图像配准、三维重建、姿态估计等应用中。
本文将介绍几种常用的控制点检测方法,并对其原理和应用进行详细阐述。
二、特征点检测特征点检测是控制点检测的基础,它通过寻找图像中具有独特性质的像素点,用于表示图像的特定区域。
常见的特征点包括角点、边缘点、斑点等。
特征点检测的目标是找出具有鲁棒性和区分度的特征点,以便后续的匹配和跟踪。
1. Harris角点检测Harris角点检测是一种常用的特征点检测方法,它通过计算图像中每个像素点的角点响应函数,来判断该点是否为角点。
角点响应函数基于像素点的局部灰度变化和邻域窗口的自相关矩阵,通过计算特征值来判断角点的存在与否。
Harris角点检测方法具有简单、快速和鲁棒性好的特点,广泛应用于图像配准、目标跟踪等领域。
2. SIFT特征点检测尺度不变特征变换(SIFT)是一种基于局部图像特征的检测方法,它通过在不同尺度空间中寻找极值点,并提取出具有独特性质的SIFT描述子。
SIFT特征点检测方法具有旋转不变性和尺度不变性的优点,适用于大尺度和小尺度的图像配准和匹配任务。
三、控制点匹配控制点匹配是将两幅或多幅图像中的特征点进行对应的过程,目的是找到它们之间的几何关系。
控制点匹配可以通过特征描述子的相似性度量来实现,常用的方法包括最近邻匹配、RANSAC算法等。
1. 最近邻匹配最近邻匹配是一种简单直观的匹配方法,它将一个特征点与另一幅图像中最相似的特征点进行匹配。
匹配的相似性度量通常使用欧氏距离或汉明距离。
最近邻匹配方法简单易实现,但对于存在噪声和遮挡的情况,容易产生错误的匹配。
2. RANSAC算法RANSAC(Random Sample Consensus)算法是一种鲁棒的参数估计方法,常用于控制点匹配中的模型拟合。
它通过随机选择一组数据样本,计算模型参数,并统计符合模型的样本数目。
图像特征提取方法
图像特征提取方法摘要特征提取是计算机视觉和图像处理中的一个概念。
它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。
特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。
至今为止特征没有万能和精确的图像特征定义。
特征的精确定义往往由问题或者应用类型决定。
特征是一个数字图像中“有趣”的部分,它是许多计算机图像分析算法的起点。
因此一个算法是否成功往往由它使用和定义的特征决定。
因此特征提取最重要的一个特性是“可重复性”:同一场景的不同图像所提取的特征应该是相同的。
特征提取是图象处理中的一个初级运算,也就是说它是对一个图像进行的第一个运算处理。
它检查每个像素来确定该像素是否代表一个特征。
假如它是一个更大的算法的一部分,那么这个算法一般只检查图像的特征区域。
作为特征提取的一个前提运算,输入图像一般通过高斯模糊核在尺度空间中被平滑。
此后通过局部导数运算来计算图像的一个或多个特征。
常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。
当光差图像时,常常看到的是连续的纹理与灰度级相似的区域,他们相结合形成物体。
但如果物体的尺寸很小或者对比度不高,通常要采用较高的分辨率观察:如果物体的尺寸很大或对比度很强,只需要降低分辨率。
如果物体尺寸有大有小,或对比有强有弱的情况下同事存在,这时提取图像的特征对进行图像研究有优势。
常用的特征提取方法有:Fourier变换法、窗口Fourier变换(Gabor)、小波变换法、最小二乘法、边界方向直方图法、基于Tamura纹理特征的纹理特征提取等。
设计内容课程设计的内容与要求(包括原始数据、技术参数、条件、设计要求等): 一、课程设计的内容本设计采用边界方向直方图法、基于PCA的图像数据特征提取、基于Tamura纹理特征的纹理特征提取、颜色直方图提取颜色特征等等四种方法设计。
(1)边界方向直方图法由于单一特征不足以准确地描述图像特征,提出了一种结合颜色特征和边界方向特征的图像检索方法.针对传统颜色直方图中图像对所有像素具有相同重要性的问题进行了改进,提出了像素加权的改进颜色直方图方法;然后采用非分割图像的边界方向直方图方法提取图像的形状特征,该方法相对分割方法具有简单、有效等特点,并对图像的缩放、旋转以及视角具有不变性.为进一步提高图像检索的质量引入相关反馈机制,动态调整两幅图像相似度中颜色特征和方向特征的权值系数,并给出了相应的权值调整算法.实验结果表明,上述方法明显地优于其它方法.小波理论和几个其他课题相关。
基于单摄像头的三维体表损伤面积定量测量方法
基于单摄像头的三维体表损伤面积定量测量方法刘春晖;樊瑜波;许燕【摘要】体表损伤的测量是临床医学研究和法医学鉴定的一项重要工作,体表损伤面积的定量测量在法医鉴定、临床实验、伤口病理分析和日常患者护理方面有着重要意义.首次将运动恢复形状算法(SFM)与最小二乘共形映射(LSCM)引入到体表损伤面积的测量中,结合图像分割提出一种适合人体体表损伤图像的面积测量算法.运用算法对人体体表损伤图像进行特征提取、稀疏重建、密集重建,得到图像中被测体的3D点云,而后利用泊松表面重建算法将点连成面,使其网络化,最后通过展UV 进行损伤面积的提取和测算.以已知面积的模拟伤口为基准,用40组模拟损伤数据对所提出算法的准确率进行评价.实验结果表明,测量平均准确率达到97%,较二维测量方法提高10.79%.这种算法可克服接触式方法的缺陷,解决二维测量无法克服的人体曲率问题和拍摄角度问题,尤其在人体曲率大的部位计算准确率高,设备依赖性小.%The measurement of skin wounds is an important work in the field of clinical research and forensic identification.Quantitative measurement of skin wounds area has important significance in forensicidentification,clinical trials,the wound pathological analysis and daily patient care.In this paper,the algorithm of structure from motion (SFM) and least squares conformal mapping (LSCM) were introduced into the measurement of skin wounds area,combined with image segmentation,an algorithm that suitable for the area measurement of the human body surface was proposed.This paper used eigenvalue extraction,sparse reconstruction and dense reconstruction in order to get the 3D point cloud of the tested body.Then the paper used the Poisson reconstructionalgorithm on the point to make them networked,and unwrap the UV map of the 3D model for skin wounds extraction and measurement in the end.This paper used the known area simulation wound as a benchmark,40 groups were adopted to evaluate the accuracy of the algorithm.The measuring accuracy of the experimental results showed that the algorithm in this paper reached the accuracy of 0.97,compared with 2D measurement method,the accuracy was increased by 10.79%.The algorithm in this paper solved the shortcoming of the contact method and the problem of human curvature or angle deflection,which was hard to solve by the 2D measurement.In addition,the algorithm in this paper has less dependence of equipment and high accuracy especially in the parts with large curvature.【期刊名称】《中国生物医学工程学报》【年(卷),期】2018(037)001【总页数】9页(P40-48)【关键词】体表损伤;三维;定量分析【作者】刘春晖;樊瑜波;许燕【作者单位】北京航空航天大学生物与医学工程系,北京航空航天大学软件开发环境国家重点实验室,深圳北航新兴产业技术研究院,生物医学工程高精尖创新中心,北京100191;北京航空航天大学生物与医学工程系,北京航空航天大学软件开发环境国家重点实验室,深圳北航新兴产业技术研究院,生物医学工程高精尖创新中心,北京100191;国家康复辅具研究中心,北京100176;北京航空航天大学生物与医学工程系,北京航空航天大学软件开发环境国家重点实验室,深圳北航新兴产业技术研究院,生物医学工程高精尖创新中心,北京100191;微软亚洲研究院,北京100080【正文语种】中文【中图分类】R318引言体表损伤的测量是临床医学研究和法医学鉴定的一项重要工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种结合图像特征的三维模型变化检测方法
摘要
本文提出了一种基于图像特征结合的三维模型变化检测方法。
该方
法基于三维模型检测的理论,并结合了图像特征提取算法,能够更准确
地检测三维模型的变化,并给出变化的具体位置。
我们通过对实验数据
的分析,证明了该方法的有效性和可行性。
关键词:三维模型检测;图像特征提取;变化检测;实验分析
引言
在三维模型应用中,三维模型的正确性是非常重要的,因为任何不
准确的三维模型都会影响到后续的应用和研究。
而在实际应用中,三维
模型的变化是很常见的现象,可能是由于构建过程中的误差、建模过程
中的缺陷、或者是应用中的变化等原因导致的。
因此,如何检测三维模
型的变化,准确的定位变化的部位,对于三维模型的应用具有非常重要
的意义。
目前,针对三维模型的变化检测,主要采用两种方法:基于三维模
型的重建和比较;基于三维模型的表面几何形状的测量和比较。
前者需
要依靠三维模型的重建技术,比较复杂和耗时,而后者则需要基于三维
模型的几何形状进行比较,常常无法准确地检测到细微的变化。
本文提出了一种结合图像特征的三维模型变化检测方法。
该方法采
用基于图像特征的方法,通过图像的比较来检测三维模型的变化,并能
够精确定位变化的位置。
我们通过对实验数据的分析,证明了该方法的
有效性和可行性。
方法
本文提出的方法主要分为三个步骤:图像特征提取、图像特征比较、三维模型变化检测。
1.图像特征提取
首先,我们需要对三维模型进行拍照,获得一组图像作为检测对象。
对于每张图像,我们采用特征提取算法对其进行特征提取,得到一组描
述该图像特征的向量。
常用的图像特征提取算法包括:SIFT、SURF、ORB 等。
2.图像特征比较
针对两张图像的比较,我们采用SIFT 算法进行匹配,得到两张图像之间的匹配点集。
匹配点集的数量越多,说明两张图像的相似度越高。
3.三维模型变化检测
在两张图像的比较基础上,我们采用三维模型变化检测的理论进行
变化检测。
具体来说,我们需要将图像上相邻的匹配点对,映射到三维
模型的空间中,通过分析三维空间中点对的位置关系,来检测三维模型
的变化。
结果与讨论
实验数据来自于三维模型的变化数据集。
我们选择了其中10 个测试对象进行了实验。
首先,我们对每个测试对象进行了图像特征提取,并
根据SIFT 算法进行了匹配。
得到了10 组匹配点集,每个匹配点集包含
2 张图像之间的匹配点对。
然后,我们将匹配点对从图像空间中映射到三维空间中,并通过分析三维空间中的位置关系,来检测三维模型的变化。
实验结果表明,我们提出的方法能够准确地检测三维模型的变化,并给出变化的具体位置。
对于实验数据中的10 个测试对象,我们的方法的准确率均超过90%。
相比于传统的方法,结合图像特征的方法在准确率和检测速度上都有很大的提升。
结论
本文提出了一种新的基于图像特征结合的三维模型变化检测方法,
该方法采用图像特征提取和比较的方式,结合三维模型检测的理论,能
够更准确地检测三维模型的变化,并给出变化的具体位置。
通过对实验
数据的分析,证明了该方法的有效性和可行性。
在今后的三维模型应用中,该方法有着非常广阔的应用前景。