CODESYS运动控制之SMC_Interpolator
codesys脉冲定位指令

Codesys脉冲定位指令简介本文档将介绍Co de sy s中的脉冲定位指令。
脉冲定位指令是一种在工业自动化领域中常用的指令,用于实现对位置的精确控制。
本文将详细介绍C od es ys中常用的脉冲定位指令的使用方法和注意事项。
脉冲定位指令的概述脉冲定位指令是一种用于控制运动装置的指令,其原理是通过控制装置的运动轴,根据给定的脉冲数,将装置准确移动到目标位置。
这种指令在许多工业自动化应用中广泛使用,如机器人控制、数控机床等。
脉冲定位指令通常由一系列的参数组成,包括起始位置、目标位置、速度、加速度等。
通过调整这些参数,可以实现对位置的精确控制。
Codes ys中的脉冲定位指令在C od es ys中,提供了丰富的脉冲定位指令,可满足不同应用场景下的需求。
下面将介绍一些常用的脉冲定位指令及其使用方法。
M C_M o v e A b s o l u t eM C_M ov eA bs ol ut e指令用于将运动轴移动到指定的绝对位置。
其语法如下:M C_M ov eA bs ol ut e(a x is_n am e,po si tio n,v el oc it y,ac cel e ra ti o n)-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`po si ti on`:目标位置,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可以实现对运动轴的直接控制,使其移动到指定的位置。
M C_M o v e R e l a t i v eM C_M ov eR el at ive指令用于将运动轴相对于当前位置移动指定的距离。
其语法如下:M C_M ov eR el at iv e(a x is_n am e,di st anc e,v el oc it y,ac cel e ra ti o n)-`ax is_n am e`:指定要控制的运动轴的名称或编号。
CODESYS(V3.5SP12...

CODESYS(V3.5SP12...1、接下来写单轴驱动的程序,采用的语言为CFC;2、右击左侧导航栏中的Application→添加对象→程序组织单元→指定名称→类型为:程序→实现语言选择CFC;3、效果图如下4、将刚刚添加的POU程序组织单元拖动至EtherCAT_Task任务下面,效果图如下图所示,如果不这样做的话,即便是在POU里写了程序,也不会被执行,程序必须要放在指定的任务中才会被执行;工程里默认产生的POU(PRG)可以直接删掉5、在刚刚添加的程序组织单元中利用CFC编写单轴运动程序;6、从右侧工具栏中拖一个运算块至程序组织单元中,如下图所示7、指定运算块的类型:单击三个问号→出现一个按钮,上面有三个点→单击该按钮→在随后出现的界面左上角单击文本搜索→输入mc_power8、单击右下角的确定,随后按三次回车;9、之后再按照同样的顺序添加三个运算块,分别是MC_MOVEVELOCITY MC_ReadStatus M C_Reset10、最后的效果图如下图所示注意MC_MoveVelocity功能块的部分参数已经指定了,包括加速度、减速度和加加速度,指定参数的方法:单击功能块相应的引脚,直接输入相应的数字;11、为程序组织单元添加方法,类似于C++的类方法,我们可以为类添加方法,在这里,我们也可以为程序组织单元添加方法,我们这里添加几个单轴运动的简单方法,changespeed—更改速度大小,changedirection—更改电机转动方向,stop—停止电机转动;12、下面是具体添加步骤;13、右击之前添加的程序组织单元à添加对象à方法,添加三个方法,分别命名为changeDir changeSpeed stop,并将其所属的程序组织单元POU重命名为single_axis,添加方法完毕后的效果如下图所示14、changeDir()方法的代码如下图所示,注意上半部分是输入变量的定义部分,相当于C/C++中函数的形参,后面我们在调用这个方法的时候会给这个形参赋一个相应类型的值,比如这里的形参类型为MC_DIRECTION,后面我们在调用的时候赋值1,电机正方向转,如果赋值-1电机反方向转;下半部分是属于函数的实现部分;功能块的调用,有一个需要注意的地方:通常方法会需要一个上升沿,所以在调用MC_MoveVelocity_0功能块实例的时候,首先需要给Execute赋值FALSE,然后修改完我们所需要的速度方向后,再赋值Execute为TRUE,这样,对功能块参数的修改才能生效;15、changeSpeed()方法的代码如下图所示,这个方法是修改电机转速的,所以方法的形参是数值类型的—REAL,注意这里修改完参数后,也是需要一个上升沿来让参数生效的;16、stop()方法的代码如下图所示,让电机停下来就是使得其转速为零,跟之前的调速方法类似;17、之后是操控界面的编写;18、在左边导航栏处右击Application→添加对象→视图→确定,左边导航栏出现了visualization,页面添加完毕,接下来是具体按钮的添加和布局;19、双击左边导航栏的visualization,切换到编辑页面;20、进入右边导航栏工具箱页面,如下图所示,包括常用的基本控件和运动控制控件;21、添加模拟电机功能块:进入工具箱底部的搜索框,搜索rot(不用区分大小写),选择如下的控件,并将其拖动到编辑区域;22、随后软件会自动弹出一个如下图所示的界面23、双击上一步中箭头所指的空白区域,空白区域会出现一个带有三个点的按钮,单击这个按钮,会出现另一个新的界面,如下图所示,点开红色箭头所指的“+”号24、接着上一步来,点开之后选择我们之前创建的轴—axis_1,单击右下角确定25、添加MC_Power功能块:与之前添加模拟电机功能块的操作类似,在右边导航栏的搜索框内搜索mc_power(不用区分大小写)CODESYS运动控制之MC_MoveAbsolute.docx docx 1星超过10%的资源 108KB下载将mc_power控件拖动至编辑区域,软件会自动弹出一个页面,按照之前添加模拟电机控件的方法,将之前创建的MC_Power功能块与之进行关联,点击确定后,关闭页面,如下图所示26、按照同样的方法,添加MC_MoveVelocity控件,关联MC_MoveVelocity功能块,添加MC_Reset 控件,关联MC_Reset_0功能块,添加MC_ReadStatus控件,关联MC_ReadStatus_0功能块,如下几个图所示27、添加按钮,和前几步类似,在右边导航栏搜索框内搜索button,待选区域出现了如下几个按钮28、拖动按钮到界面的编辑区,一个需要添加5个,单击按钮,右边导航栏出现按钮的属性页面,在Texts—Text中添加具体的功能指示,分别是:调速1 调速2 顺时针转逆时针转停止效果图如下图所示29、接下来需要给按钮添加具体的功能的代码;30、首先给调速1添加代码;31、单击调速1按钮,转到按钮的属性页面,如下图所示CODESYS运动控制之MC_CamTableSelect.docx docx 0星超过10%的资源 229KB下载32、找到输入配置OnMouseClick,单击其后的配置。
codesys 伺服电机控制程序案例
codesys 伺服电机控制程序案例Codesys是一种常用的工业自动化编程软件,能够用于编写伺服电机控制程序。
下面列举10个关于Codesys伺服电机控制程序案例的内容。
1. 伺服电机控制简介:介绍伺服电机及其应用领域,以及为什么需要使用Codesys来编写伺服电机控制程序。
2. Codesys基本语法:介绍Codesys的基本语法,包括变量定义、运算符、控制结构等,以便读者能够理解后续的案例代码。
3. 位置控制案例:编写一个简单的伺服电机控制程序,实现位置控制功能。
通过设定目标位置和速度,使伺服电机能够精确地移动到指定位置。
4. 速度控制案例:编写一个伺服电机控制程序,实现速度控制功能。
通过设定目标速度和加速度,使伺服电机能够稳定地运行在指定速度。
5. 力控制案例:介绍伺服电机的力控制功能,并编写相应的控制程序。
通过设定目标力和控制策略,使伺服电机能够根据外部力的变化进行调整。
6. 插补运动案例:介绍伺服电机的插补运动功能,并编写相应的控制程序。
通过设定多个目标位置和速度,使伺服电机能够按照设定的轨迹进行运动。
7. 位置误差补偿案例:介绍伺服电机的位置误差补偿功能,并编写相应的控制程序。
通过测量实际位置和目标位置的差值,使伺服电机能够及时调整控制输出,减小位置误差。
8. 报警处理案例:介绍伺服电机的报警处理功能,并编写相应的控制程序。
通过监测伺服电机的状态和反馈信号,及时处理可能出现的故障或异常情况。
9. 通信控制案例:介绍伺服电机的通信控制功能,并编写相应的控制程序。
通过与其他设备或系统进行通信,实现更高级的控制和监测功能。
10. 参数调整案例:介绍伺服电机的参数调整方法,并编写相应的控制程序。
通过调整伺服电机的控制参数,使其能够更好地适应不同的工作环境和任务需求。
以上是关于Codesys伺服电机控制程序案例的内容,通过这些案例的介绍和实践,读者可以更好地理解和掌握Codesys在伺服电机控制方面的应用。
CODESYS运动控制之Trace功能
CODESYS运动控制之Trace功能
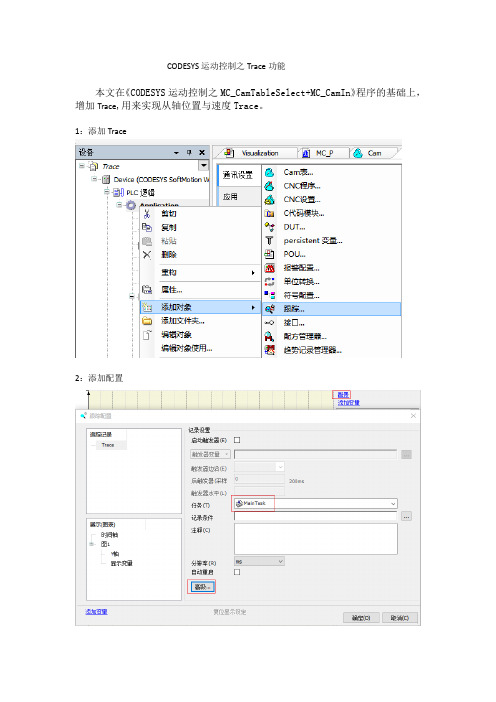
本文在《CODESYS运动控制之MC_CamTableSelect+MC_CamIn》程序的基础上,增加Trace,用来实现从轴位置与速度Trace。
1:添加Trace
2:添加配置
3:高级设置可做相应更改
4:添加追踪变量,本例以Y轴位置为例
5:启动softmotion
6:扫描设备
7:登陆下载并启动,此时启动并不会进入可视化界面
8:通过网页访问可视化(如果有目标视图可以直接通过目标视图)
8.1打开浏览器,并输入http://localhost8080/webvisu.htm,按ENTER就会进入8.2:点击bRegulatoOn,触发MC_Power,使能X轴
8.3使能Y轴,触发Move_Velocity、此时X轴已经转起来
8.4触发MC_CamTableSelect,
8.5触发MC_Cam,此时Y轴已经运动起来
9:在Trace界面,右键下载Trace,就会看到位置和速度的曲线,
监测一段时间后停止Trace
10:下图是Trace的曲线
11:通过Trace功能可以监测轴的状态,同时也可以监测程序中的其他变量,能够很好的去观察一个值的变化,在一定程度上方便了调试。
CODESYS运动控制之人机界面模板1
CODESYS运动控制之人机界面模板1
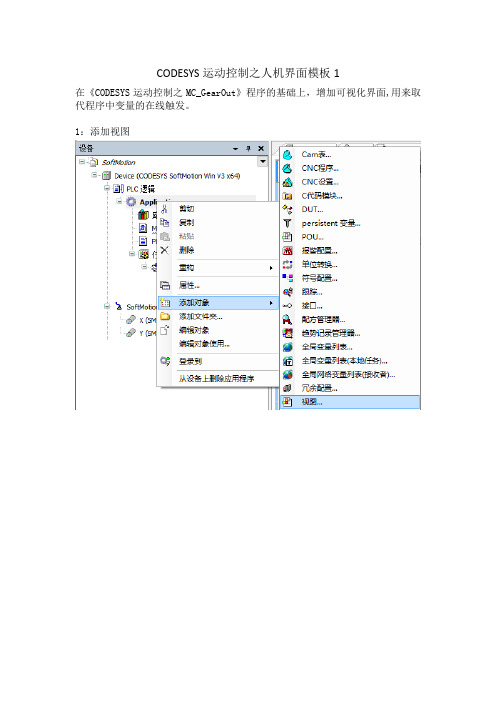
在《CODESYS运动控制之MC_GearOut》程序的基础上,增加可视化界面,用来取代程序中变量的在线触发。
1:添加视图
2:在可视化工具箱处输入功能块名字,按回车就能搜到功能块可视化的图标,以下以MC_Power为例。
3:拖动图标值视图中,并关联变量MC_Power_0
4:如下是添加好的视图模板
5:添加X、Y轴的显示图标,并关联轴
6:下图是编辑好的视图
7:启动softmotion
8:扫描设备
9:登陆下载并启动
10:下图是启动后的界面
11:点击bRegulatoOn,触发MC_Power,使能X轴
12:使能Y轴,触发Move_Velocity、此时X轴已经转起来
13:触发MC_GearIn后Y轴运动起来
14:触发MC_GearOut,Y与X轴脱离啮合,并停止
注意:视图是在以下程序的基础上,才实现对轴的控制。
CODESYS运动控制之MC_MoveVelocity

CODESYS运动控制之MC_MoveVelocity
1:在《CODESYS运动控制之MC_Power》程序的基础上,增加新功能块MC_MoveVelocity,用来实现轴按固定速度运动。
1.1程序中新添加功能块MC_MoveVelocity,对其变量自动声明。
之后关联轴对轴速度减减速等设定。
1.2 双击功能块,就可以弹出相关帮助文档
2:程序编译,下载
3:下载后,点击启动
4:对轴进行上电,在变量 bRegulatorON 的“准备值”后点击一下就会出现 TRUE,然后点击菜单栏中“调试”下的“写入值”
5:通过Execute给功能块MC_MoveVelocity一个上升沿信号,对其使能
6:使能后,可以看到轴的相关数据在变化。
7:当速度达到设定的100时,程序运行如下图所示。
CODESYS运动控制之RTE的安装
CODESYS movement control之RTE的安装前面系列课程,我们介绍了单轴与主从轴的movement control。
但是这些都是在虚轴的基础上进行的编程control。
那么如何使用实际的驱动器进行轴的control呢?那此时就需要RTE。
RTE装在工控机上,使工控机具有movement control器的功能。
RTE不要装在笔记本电脑上,他的安装会占有单独一个物理核。
笔记本的性能与兼容性也远不及工控机。
1:RTE的安装,本文以CODESYS Control RTE 64 3.5.16.0为例1.1在CODESYS官/网中搜索需要的软件版本,并下载1.2以管理员身份运行1.3等待准备信息配置1.4:点击下一步1.5选择我接受,并点击下一步1.6:选择默认安装路径,并点击下一步1.7:点击下一步2表示电脑CPU核数,RTE运行的时候会占用一个物理核1.8点击下一步1.9选择YES,并点下一步1.10选择softmotion RTE,并点击下一步softmotion RTE功能强大,在具有RTE功能的基础上还包含movement control,CNC、机器人等库1.11选择下一步1.12选择下一步1.13等待1.14点击确定1.15点击是1.16选择已经阅读相关安装信息1.17选择下一步1.18选择稍后重启,并点击完成2:安装完成RTE后,工控机已经成为一台movement control器。
如果要连接伺服,还需要对网卡驱动进行配置。
因为EtherCAT总线对实时性要求较高,需要把网卡驱动更新成一个具有实时性的驱动2.1打开网络适配器,2.2选择网卡,并右键选择更新驱动程序软件2.3选择浏览机计算机2.4从计算机的设备驱动程序列表中选取2.5选择从磁盘安装2.6点击浏览,找到RTE安装路径2.7点击确定、2.8点击下一步2.9点击安装2.10安装完成之后,网络适配器中会有个以CODESYS为头的网卡驱动注意:如果自己安装测试的话,要在虚拟机中安装测试,以防止电脑系统崩溃。
codesys中mc_writeparameter指令
codesys中mc_writeparameter指令Codesys是一款常用的工程自动化开发平台,它提供了丰富的功能库和指令集,用于开发和编程各种自动化控制系统。
其中,MC_WriteParameter 指令是Codesys中的一个重要指令,用于将参数值写入运动控制系统的内存中。
本文将一步一步地回答关于MC_WriteParameter指令的使用方法和相关应用。
第一步:了解MC_WriteParameter指令的基本概念MC_WriteParameter指令是Codesys平台中用于将参数值写入运动控制系统内存的指令。
通过该指令,可以方便地将不同类型的参数(例如速度、加速度、位置等)写入控制系统的内存中,以供后续运动控制程序使用。
MC_WriteParameter指令的基本语法如下:MC_WriteParameter(参数索引, 参数值)第二步:了解MC_WriteParameter指令的参数类型在MC_WriteParameter指令中,参数索引用于指定要写入的参数类型。
不同的运动控制系统可能有不同的参数类型,常见的参数类型有速度、加速度、位置等。
第三步:确定要写入的参数索引在使用MC_WriteParameter指令之前,需要确定要写入的参数索引。
这可以通过查看运动控制系统的文档或参考相关的开发手册来进行确定。
通常,参数索引是一个数字,用于唯一地标识不同类型的参数。
第四步:确定要写入的参数值确定要写入的参数值是使用MC_WriteParameter指令的关键步骤之一。
参数值的选择取决于具体的应用需求,例如,如果要设置运动控制系统的速度参数,可以根据需要选择合适的速度值。
第五步:编写MC_WriteParameter指令代码在Codesys开发环境中,可以使用Ladder Diagram(梯形图)、Structured Text(结构化文本)或其他编程语言来编写MC_WriteParameter指令。
施耐德运动控制功能块说明
基于Motion Pro的Motion Function Block 说明3、运动控制功能块说明3.1 MC_Power伺服轴使能,这个功能块包含在SM_PLCopen.lib的库文件中。
3.2 MC_MoveVelocity伺服轴速度控制,这个功能块包含在SM_PLCopen.lib的库文件中。
3.3 MC_Stop伺服轴以指定的减速时间停车,这个功能块包含在SM_PLCopen.lib的库文件中。
时序图如下:如果电机没有减速到零,或者MC_Stop的Execute管脚信号为ON,其他任何运动命令都将被忽略。
3.4 MC_ResetAxis这个功能块包含在SM_PLCopen.lib的库文件中,复位伺服轴故障,使伺服轴从故障停车状态(ErrorStop)进入停止且无故障状态(Standstill),这个功能块包含在SM_PLCopen.lib的库文件中。
3.5 MC_SetPosition Gearin模式下是否可以用?这个功能块包含在SM_PLCopen.lib的库文件中,改变伺服轴当前位置值(重新标定伺服轴位置),这个功能块不会使伺服轴产生附加运动。
伺服轴在运动中也可以调用本功能块,不会改变当前运动的目标定位位置,但是,由于伺服轴当前值已改变,当前运动任务会根据MC_SetPosition执行之后重新标定的伺服轴位置来计算运动轨迹。
当Mode=False(默认值,绝对位置控制)时,伺服轴新的当前值会更改成Position管脚对应的数值。
当Mode=True (相对位置控制)时,伺服轴新的当前值会更改成伺服轴当前值+Position管脚对应的数值。
3.6 MC_GearIn伺服轴进入电子齿轮模式修改齿轮比的执行时序图:3.7 MC_Gearout伺服轴退出电子齿轮模式MC_Gearout的Done管脚必须连接到MC_Stop的Execute管脚(如下图),否则,从轴将以MC_Gearout执行时刻的电机转速一直运行下去。
通过Codesys_RTE软件仿真LMC058运动控制功能
通过Codesys_RTE软件仿真LMC058运动控制功能通过Codesys RTE软件仿真LMC058运动控制功能东南区SAE 徐海强Somachine底层是Codesys V3,这个软件平台包含实时开发环境功能(RTE:Real Time Enviorment),可以仿真PLC的各种功能,也包括运动控制功能,比如P2P,Gear,CAM,CNC…。
使用RTE,我们可以在给客户培训、项目编程准备时不必连接到LMC058就能演示/验证所需运动控制功能。
首先,介绍Somachine中的一个基本RTE: CoDeSys_SP_Win_V3.Somachine编程时可以选择CoDeSys_SP_Win_V3作为目标机器,Somachine软件内置了Codesys SP Win V3的仿真器。
这个仿真器可以模拟一些基本的PLC功能。
其次,介绍本文的重点,Somachine中的另一个RTE:CoDeSys_SP_SoftMotion_RTE_V3.Somachine编程时可以选择CoDeSys_SP_SoftMotion_RTE_V3作为目标机器,但是SomachineV3 Beta4-1没有把CoDeSys_SP_SoftMotion_RTE_V3仿真器包含进来,我们需要到Cosesys公司网站下载一个仿真器(Codesys Control RTE)。
这样,我们新建的CoDeSys_SP_SoftMotion_RTE_V3就可以找到目标机器了。
编写运动控制程序,本文以切换两条电子凸轮曲线为例。
登陆,运行。
查看凸轮曲线切换执行效果,OK!最后,介绍Motion Pro软件上述功能的实现方法.Motion Pro是基于Codesys V2.3的,与Somachine相似,也可以通过虚拟设备仿真,实现方法如下:1、安装目标文件3S Codesys SP RTE。
2、安装CoDeSys_SP_RTE仿真器。
3、新建项目时,选择3S Codesys SP RTE作为目标系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CODESYS运动控制之SMC_Interpolator及逆解功能
前面已经介绍了G代码格式、G代码编辑器的添加以及用G代码来描述一个图形的轨迹。
G代码编写完成之后,怎么才能运行?这时就需要插补器。
决定坐标轴联动过程中各坐标轴的运动顺序、位移、方向和速度的协调过程即为插补。
(interpolation),在CNC中,插补功能由软件或者软硬件结合来实现,称为插补器。
(CNC 是计算机数字控制机床(Computer numerical control,即数控机床)的简称,是一种由程序控制的自动化机床)。
1:程序中添加插补器功能块SMC_Interpolator
双击功能块可以查看帮助文档
2:逆解功能是把插补出来的数据转换为轴需要的坐标系。
龙门机构只需要XYZ笛卡尔坐标系,而另外一些机构如Scara机械手就需要只需要把笛卡尔坐标系转换成极坐标系。
2.1 添加一个两轴龙门机构的逆解
2.2双击功能块可以查看说明文档
上图是把笛卡尔坐标系转换为笛卡尔坐标系
3:添加Scara机械手,双击可查看说明文档
上图是把笛卡尔做标系转换为Scara2(本例中为两轴)机械手需要的极坐标系整个过程如下:。