风力发电机偏航系统控制策略研究
基于PSCAD的双馈风力发电机偏航控制的研究
I G, N 该算法的核心内容是 在大范围风向变化时采 用风向标控制算法 , 而在小范 围风 向变化时则采用 功率 控制算 法。 采用 P C D仿 真软件对双馈 电机模型进行仿真 , SA 分析算法 的优越性 , 明算法的原理 。并通 过仿 真 , 到转子有功 说 得 功率的仿真曲线进行分析 , 结果表明了该算法是有效可行的 , 提高了对风 精度 , 增加了系统的输 出功率 。
( p cs 此 4l p P 动准确对风 , 在非可用风速范围下能够 9 。 O侧风 , 在 P )= ~ ・ oO由 图 1可 知 , 时 ,p = - 一 )= 2 ( 一cs) 中 , 轴 为功率轴 ; 轴 为偏 p ・ 1 o0 其 Y x 连 续跟踪 风 向可能造 成 电缆缠 绕 的情况 下 的 自动解 ( 航 电机定位轴 ; 曲线 v、: 为风 向曲线 ;, p 为瞬时功 缆, 从而使风力发电机能够运转平稳可靠 , 高效地利
第2 6卷Байду номын сангаас第 2期 21 0 0年 1 月
甘肃科 技
Ga s ce c n e h oo y n u S in ea dT c n lg
I2 f 6 .
^ 2 b.
J n 2 1 a. 00
基于 P C S AD的双 馈 风 力发 电机 偏 航 控 制 的研 究 ’
高文元, 马小英 , 王现青 , 王加伟
基 于 目前 对 此方 面 的研 究 现 状 , 论上 提 出 一 理
2 双 馈 风 力 发 电 机 组 的 “ ae Hl V n — i l Ciig ( 向标 山) l n” 风 m 算法
风力发电机组偏航控制系统技术分析及应用

风力发电机组偏航控制系统技术分析及应用风力发电作为可再生清洁能源,能够实现将风能进行转化为电能加以利用,在能源替代与节能减排的低碳电力发展中扮演重要角色。
风速具有概率随机性和参数模糊性的多重不确定性特征,需要对风力发电机组进行偏航控制,本文详细对风力发电机组偏航控制系统技术进行了分析,并介绍了风力发电机组偏航控制系统技术的相关应用情况。
标签:风力发电;机组;偏航;控制技术0 引言风能作为一种清洁的可再生能源而越来越受到人们的关注,作为风能利用的主要形式,风力发电备受瞩目。
风力发电过程中,风向可能会随时变化,这就需要对风电机组进行偏航控制。
偏航控制是在可用风速范围内对风电机组自动准确控制,从而提高风能的利用率。
目前偏航角度的测量通常采用电位计的方式进行,由于电位计的本身特性缺陷,以及电位计输出的信号极易受到外界的干扰,而且,电位计的长期使用也可能会使得偏航角度对应的信号出现异常,需要对偏航角度的测量方法加以改进,提高风力发电机组偏航控制系统的控制性能。
本文首先分析了风力风电机组的基本结构和基本原理,之后阐述了风力发电机组具体的偏航控制技术。
1 风力发电机组1.1 海上风电概述当下我国正在进行能源转型,走绿色发展道路已经成为共识,海上风电则是推动这一战略早日落地的重要力量。
对中国来说尤其如此,我国沿海11个省份的GDP约占全国的一半,总能耗也占全国的一半左右。
对于这些地区而言,海上风能资源丰富,新能源电力消纳能力强,大力发展海上风电将是加快能源转型进程的重要手段。
目前我国海上风电开发已经进入了规模化、商业化发展阶段。
我国海上风能资源丰富,根据全国普查成果,我国5~25米水深、50米高度海上风电开发潜力约2亿千瓦;5~50米水深、70米高度海上风电开发潜力约5亿千瓦。
根据各省海上风电规划,全国海上风电规划总量超过8000万千瓦,重点布局分布在江苏、浙江、福建、广东等省市,行业开发前景广阔。
近年来海上风电得到了大力发展,国家出台了多项政策鼓励发展海上风电,并走出国门开始与国外共同开发海上风电资源。
风力发电系统中的风机控制策略研究

风力发电系统中的风机控制策略研究随着气候变化和能源需求的不断增长,风力发电作为一种可再生能源,在全球范围内得到了广泛应用。
然而,由于风力发电受风速变化、失速和悬停等因素的影响,风机的控制策略成为了提高发电效率和可靠性的关键。
本文将讨论风力发电系统中常用的风机控制策略,并从理论和实践角度探索其优势和挑战。
一、最大功率点追踪控制策略最大功率点追踪控制策略是风力发电系统中最常见的控制策略之一。
其核心思想是在不同的风速下调整风机的转速,以达到最佳发电效率。
为了实现这一目标,需要根据当前风速对风机的动力响应进行建模,并设计适当的控制算法来实时调整转速。
最大功率点追踪控制策略的优势是能够最大限度地提高发电效率,进而实现更好的经济效益。
然而,该策略在风速变化较快和失速等复杂气象条件下的性能仍然存在一定挑战,需要进一步的研究和改进。
二、失速控制策略失速是指风机叶片在风速超过一定临界值时失去升力而停转的现象。
为了避免失速对风力发电系统的影响,研究人员开发了一系列失速控制策略。
其中最常用的是变桨控制和液压刹车控制。
变桨控制通过改变叶片的角度来调整风机的升力系数,从而控制风机的转速。
液压刹车控制则通过施加刹车力矩来实现风机的停转。
这两种策略都能有效地应对失速现象,提高风力发电系统的可靠性和安全性。
然而,失速控制策略在实践中面临的主要挑战是如何准确地判断失速发生的时刻和风速,以及如何快速而精确地实施相应的控制措施。
三、风机群控制策略风机群控制策略是指通过协调多台风机的运行,以达到更高的风能利用率和系统可靠性。
在风力发电场中,通过合理地调整风机的发电功率和转速,可以实现风力资源的最优分配。
目前,常用的风机群控制策略包括功率间歇控制、功率分配控制和联合控制等。
功率间歇控制策略通过适时地启停风机来平衡发电功率和系统负荷之间的差距。
功率分配控制策略则根据风机的特性和电网负荷情况,动态分配风机之间的发电功率。
联合控制策略则将多台风机视为一个整体,通过相互之间的通信和协作来实现最优控制。
实验三 风力发电机组偏航控制
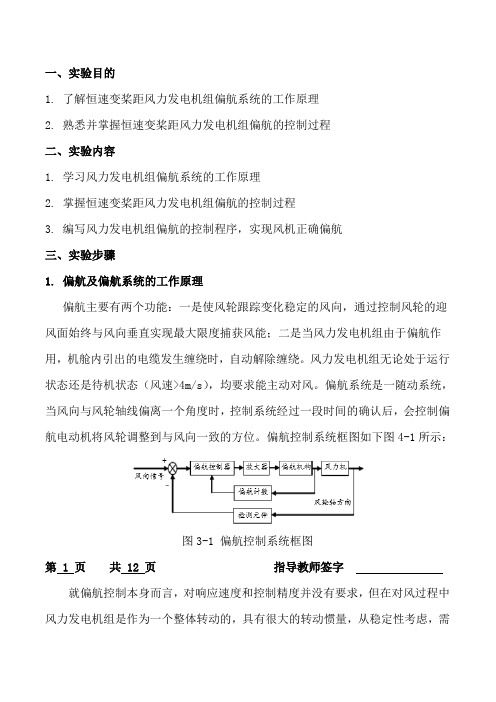
一、实验目的1. 了解恒速变桨距风力发电机组偏航系统的工作原理2. 熟悉并掌握恒速变桨距风力发电机组偏航的控制过程二、实验内容1. 学习风力发电机组偏航系统的工作原理2. 掌握恒速变桨距风力发电机组偏航的控制过程3. 编写风力发电机组偏航的控制程序,实现风机正确偏航三、实验步骤1. 偏航及偏航系统的工作原理偏航主要有两个功能:一是使风轮跟踪变化稳定的风向,通过控制风轮的迎风面始终与风向垂直实现最大限度捕获风能;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解除缠绕。
风力发电机组无论处于运行状态还是待机状态(风速>4m/s),均要求能主动对风。
偏航系统是一随动系统,当风向与风轮轴线偏离一个角度时,控制系统经过一段时间的确认后,会控制偏航电动机将风轮调整到与风向一致的方位。
偏航控制系统框图如下图4-1所示:图3-1 偏航控制系统框图第 1 页共 12 页指导教师签字就偏航控制本身而言,对响应速度和控制精度并没有要求,但在对风过程中风力发电机组是作为一个整体转动的,具有很大的转动惯量,从稳定性考虑,需要设置足够的阻尼。
在风轮前部或机舱一侧,装有风向仪(风标),当风力发电机组的航向(风轮主轴的方向)与风标指向偏离时,控制器开始计时。
偏航时间达到一定值时,即认为风向已改变,控制器发出向左或向右调向的指令,直到偏差消除。
有多种方式可以监视电缆缠绕情况,除了在控制软件上编入调向计数程序外,还可在电缆处直接安装传感器,最简单的传感器是一个行程开关,将其触点与电缆束连接,当电缆束随机舱转动到一定程度即拉动开关。
2. 掌握风力发电机组的偏航控制过程偏航控制主要分为手动偏航和自动偏航。
手动偏航是指人为的对风机偏航方向进行控制,通过更改左右偏航的设定值即可,请注意在给偏航信号置1后,要及时复位,否则容易造成左右偏航信号同时为1导致偏航控制紊乱;自动偏航主要是通过计算风向角与偏航角的差值大小来区分如何快速解缆、快速对风,这就需要对整个风机的偏航控制要有一个较深的理解。
风力发电机组控制策略研究
风力发电机组控制策略研究随着可再生能源产业的迅猛发展,风力发电作为其中的重要组成部分,正逐渐成为解决能源供需平衡和减少环境污染的有效途径。
风力发电机组控制策略的研究,对于提高风力发电的效率、降低运行成本以及保证系统可靠性具有重要意义。
本文将对风力发电机组控制策略的研究进行讨论,并针对当前面临的挑战提出相应的解决方案。
风力发电机组的控制策略可分为整机控制策略和发电机控制策略。
整机控制策略旨在优化风力机组的性能以及风能的利用率,包括速度控制策略、功率调整策略和最大功率点跟踪策略等。
而发电机控制策略主要涉及到发电机的转矩控制以及电网连接控制。
在整机控制策略方面,速度控制策略是一种常用的方法。
该策略通过调整风力发电机组的转子转速,使其在不同风速条件下都能工作在最佳转速范围,从而提高发电效率。
此外,功率调整策略也是一种常见的整机控制策略,其重点在于维持机组输出的电功率稳定,并进行功率平衡调节。
最大功率点跟踪策略则是通过实时测量风速和机组输出功率,并通过控制转矩和转速来跟踪最大功率点,从而最大限度地提高利用率。
发电机控制策略则是确保风力发电机组与电网稳定连接的关键。
发电机的转矩控制是其中的重要一环。
通过调整转矩实现风力机组对风速的快速响应,可以提高发电机的输出功率和控制性能。
此外,电网连接控制策略也是确保风力发电机组安全、稳定地与电网交互的关键。
该策略需要确保风力发电机组与电网的频率和电压保持一致,并在电网异常情况下能够快速切换到并网或脱网状态。
然而,当前风力发电机组控制策略研究面临着一些挑战。
首先,由于风力发电机组具有非线性、时变和互联特性,控制策略的设计需要克服这些复杂性。
其次,随着风力发电规模的不断扩大,风力发电机组的运行安全和可靠性也变得更加重要。
因此,如何设计出适应不同工况的控制策略,以提高风力发电的可靠性和安全性,成为了当前的研究热点。
针对以上挑战,研究人员提出了一些解决方案。
首先,采用先进的控制算法和人工智能技术,可以增强风力发电机组的控制性能和适应性。
风力发电系统功率控制策略的优化研究
风力发电系统功率控制策略的优化研究随着环保意识的增强,近年来风力发电已经成为了不少国家重要的新能源发展方向之一,而且这个领域的技术和设备也在不断的得到改进和完善。
然而,在实际利用中,风力发电也存在不少问题,其中之一就是功率控制问题。
这篇文章主要就是针对这个问题,探讨一些优化的方法和策略。
一、背景风力发电的原理是利用风来推动转子旋转,从而带动发电机电动势的变化,最终输出电能。
但是,由于风力是随机的、不稳定的、受环境影响较大的,因此风力发电系统的功率输出也会很不稳定。
这就需要采取一些措施来进行功率控制,保证风力发电系统的安全、稳定和高效。
二、功率控制方法和策略风力发电系统的功率控制一般有两种方法,分别是变桨控制和变频控制。
变桨控制是通过调节桨叶的角度来改变转子的受力情况,从而调整输出功率。
变频控制是通过调节发电机输出电压的频率来控制输出功率的大小。
两者各有优缺点,例如变桨控制比较简单、可靠,但是调节范围较小,容易出现控制滞后;而变频控制的调节范围很大,再加上现代数字化控制器的应用,控制精度很高,但是设备成本较高。
除了变桨控制和变频控制两种比较传统的控制方法外,还有一些其他的方法和策略,例如基于有限状态机的动态功率控制策略,基于人工神经网络的自适应控制策略,等等。
这些方法能够更好地适应复杂的实际环境和劣质的电网负荷情况,提高风力发电系统的响应速度和控制精度。
三、功率控制的应用实例关于功率控制的应用实例,可以参考一些国内外已有的研究成果。
例如,德国某公司的一项研究表明,采用基于模型预测控制的方案,可以大幅提高风力发电系统的效率和电网稳定性。
另外,日本某大学的研究表明,采用基于模糊控制的策略,可以较好地解决风力发电系统输出功率波动大的问题。
总之,对于风力发电系统的功率控制来说,优化方法和策略有很多,要根据实际情况选用合适的控制方案。
整个产业链的各个环节都可能影响到风力发电系统的稳定性和效率,因此,要建立起完整的质量控制体系,不断提高技术水平和管理水平,确保风力发电系统的电力输出能够始终处于安全、稳定和高效状态。
的风力发电机偏航系统控制
题目:风力发电机组偏航系统的控制摘要让关键词:偏航系统硬件设计自动对风自动解缆目录摘要 (1)第一章概述.......................................................错误!未定义书签。
1.1 设计背景 (2)1.2 设计研究意义 (2)1.3 国内外风力发电概况 (1)1.3.1 世界风电发展 (1)1.3.2 我国风电发展 (2)第二章偏航控制系统功能简介和原理 (2)2.1 偏航控制系统的功能............................................错误!未定义书签。
2.2 风力发电机组偏航控制原理......................................错误!未定义书签。
第三章偏航系统的控制过程.........................................错误!未定义书签。
3.1 自动偏航控制..................................................错误!未定义书签。
3.1.1 自动偏航传感器ASS状态...................................错误!未定义书签。
3.1.2 参数说明和电机运行状态...................................错误!未定义书签。
3.1.3 偏航控制流程图..........................................错误!未定义书签。
3.1.4 偏航电机电气连接原理图..................................错误!未定义书签。
3.1.5 偏航对风控制PLC程序....................................错误!未定义书签。
3.2 90°侧风控制................................................错误!未定义书签。
兆瓦级风力机组偏航控制策略及仿真
兆瓦级风力机组偏航控制策略及仿真柴玉华,王贤立(东北农业大学电气与信息学院,哈尔滨,150030)摘要:当风向角在15范围内变化时,由于风向标传感器不能正常工作,导致风力机无法捕获最大风能,从而降低了风力机组的发电效率。
本文通过对风力发电机组偏航控制原理的分析,提出了一种基于MPPT控制的偏航控制系统:该控制系统通过实时测量风力机组的输出功率,不断寻找最大功率点,同时偏航控制器发出自动偏航指令,使机舱偏转,直到找到最大功率值,此时实现了机舱的准确对风,停止偏航指令。
给出了基于PLC下的硬件结构,通过在matlab/simulink 下的仿真,结果证明该控制系统响应速度快,目标准确率高。
关键词:偏航控制系统;MPPT算法;matlab/simulink;风力机中图分类号:TK83 文献标识码:AThe Control strategy and simulation of the yaw control system for MWrated wind turbineChai Yu-hua ,Wang Xian-li(Northeast Agricultural University college of Electrical Engineering and Information, Harbin150030,China)Abstract: when the wind angle changes of ±150, the wind vane sensor inside does not work,then the maximum capture of wind energy can not be achieved,reducing the wind turbine power generation efficiency. This topic was proposed based on a wide range of changes in wind direction yaw control system optimization strategy:changes in wind direction when the absolute value of less than 150,with MPPT algorithm will be used, it through measuring the output power of the wind turbine,the on- off and rotating direction of the yaw motor can be adjusted by controller, this paper presents the hardware design of yaw control system for 1.5MW DFIG, and simulates the theory analyze by matlab/simulink, and the result has a faster and balanced windward characteristic. Keywords: Yaw control system; MPPT algorithm; Matlab/Simulink; wind turbine0 引言偏航系统是水平轴式风力发电机组必不可少的组成系统之一。
高山风电场风机偏航控制策略优化的研究与分析
高山风电场风机偏航控制策略优化的研究与分析江西大唐国际新能源有限公司,江西南昌330000摘要:本文针对高山风电场风向多变、风电机组频繁偏航的问题进行了分析,研究了风电机组偏航控制策略,探讨了偏航参数定值的合理设定问题,在此基础上提出偏航控制策略优化方案,并对优化后的效果进行了分析。
关键词:风电场;偏航;控制策略0引言高山风电场海拔高,地形复杂,地势起伏大,地表粗糙程度高,气候变化无常,风机受风切变、大气湍流的影响大,且风电机组大多安装在山脊上,气流通过山脊时流动速度会产生急剧变化,气流被压缩和加速,虽然使风电机组获得了更多的风能,但其风速变化快、风向不稳定的特点却容易导致风机频繁偏航对风,增加了机组的疲劳载荷和机件磨损[1]。
对于已安装的风电机组来说,其地理位置已经固定,所处环境的影响已不可避免,只能从偏航控制策略上来寻求优化。
研究风电机组的偏航控制策略,使风电机组适应高山风电场的风速特点,对提高风电机组运行经济性具有重要意义[2]。
1 偏航控制策略概述某高山风电场33台2MW风电机组建设在山脊上,山脊海拔高程介于900m~1347.9m,山势高差较大,受地形地势影响,该风电场风向容易突变,导致风电机组存在频繁偏航的情况。
该风电场的风电机组为双馈异步机组,其偏航控制策略如下。
当检测到扭缆位置大于设定值(710°)时左/右偏航限位开关动作,执行正常停机。
当检测到偏航角度超过偏航位置绝对值设定值(750°)时,风电机组偏航扭缆限位开关动作,执行安全链停机。
当检测到30s平均风速值大于设定值(3m/s)后启用偏航逻辑。
当检测到30s平均风速值大于设定值(20m/s)后禁止偏航。
以30s平均风速值(7 m/s)来做判断区分低风速偏航和高风速偏航。
当在低风速偏航模式下偏航时,检测到风向角偏差小于设定值(4°)时停止偏航。
在低风速偏航模式下,当检测到风向角偏差大于设定值(6°)时,经过设定延时时间(60s)后开始偏航,当检测到风向角偏差大于设定值(10°)时,经过设定延时时间(40s)后开始偏航,当检测到风向角偏差大于设定值(70°)时立即开始偏航。
风力发电机组的控制策略研究与优化
风力发电机组的控制策略研究与优化随着世界对可持续能源的需求不断增加,风力发电作为一种清洁、可再生的能源形式,受到了广泛关注。
在风力发电系统中,风力发电机组的控制策略起着至关重要的作用,不仅关系到整个系统的运行效率和性能,还直接影响到系统的稳定性和经济性。
因此,研究和优化风力发电机组的控制策略对于提高风力发电系统的效果至关重要。
一、风力发电机组的工作原理风力发电机组由风能转换装置(叶片)、发电机、电气控制系统等组成。
当风吹过叶片时,叶片会受到风的作用力而转动,转动的叶片通过机械传动将动能传递给发电机,发电机将动能转化为电能,然后通过电气控制系统将电能输送至电网。
二、风力发电机组控制策略的研究现状目前,针对风力发电机组的控制策略研究已经取得了许多进展。
主要的研究方向包括最大功率点跟踪控制、风机系统的控制方法、风力发电场的集中控制等。
1. 最大功率点跟踪控制最大功率点跟踪控制是风力发电机组控制中的核心问题之一。
研究者通过分析风能的特性和风机转速、叶片角度等参数的关系,提出了一系列最大功率点跟踪算法。
这些算法在提高风力发电机组的发电效率方面起到了重要作用。
2. 风机系统的控制方法风机系统是风力发电机组中最核心的部分,其控制方法直接影响到风力发电机组的性能和可靠性。
目前,研究者借鉴了传统的控制方法,如PID控制算法、模型预测控制算法等,并结合了风机系统的特点,提出了一系列适用于风力发电机组的控制方法。
3. 风力发电场的集中控制对于具有多台风力发电机组的风力发电场来说,实现对各个风力发电机组的集中控制可以提高整个风力发电场的运行效率和经济性。
目前,研究者通过建立风力发电场的数学模型,结合优化算法,实现了对风力发电机组的集中控制。
三、风力发电机组控制策略的优化除了研究已经存在的控制策略,优化控制策略也是提高风力发电机组效果的关键。
优化控制策略可以通过调整控制参数和算法,提高风力发电机组的发电效率、稳定性和经济性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风力发电机偏航系统控制策略研究
摘要:风机偏航控制作为风电机组关键技术环节,对风电机组安全、经济运行
具有重要作用。
该文介绍了福家田风电场风力发电机偏航系统的结构原理,分析
了偏航系统运行过程中的振动故障现象及处置方法。
关键词:风力发电机;偏航系统;控制策略
前言
偏航系统作为风机关键技术环节,在远程控制界面、现地主控柜、机舱柜均
可进行风机偏航操作。
加强对风机偏航系统关键环节动作原理及控制逻辑的了解,完善偏航系统故障分析,建立规范的远控处理方式,对远程集控运营的风电场提
升风机运行质量,减少风机故障停机时间,提高风能利用效率,保障人身安全与
风机安全具有重要意义。
1风机偏航系统主要作用及工作原理
1.1主要作用
1)根据风速风向仪的传感器检测,调节机舱风轮对风位置,使风轮自动对准
风向,提高风机发电效率。
2)偏航液压刹车系统对运行风机提供必要的锁紧力矩,并吸收振动,保证风
机安全运行。
3)避免风机持续朝一个方向偏航,保证风机悬垂电缆不产生过度扭绞损坏,
在电缆达到设计缠绕值时,能自动解除缠绕。
1.2工作原理
1.2.1风机自动偏航动作过程
1)风机的风速风向以绝对正北方向作为基准传感信号,在运行过程中,当风
速风向发生变化,风速风向传感器将风速风向变化状态分别转换成弱电信号传给PLC。
同时机舱位置传感器也将机舱位置及位置变化信号转换成弱电信号传给PLC,通过进行函数计算确定风向标与机舱夹角(简称风向角)。
2)PLC根据风向角差值发出偏航指令。
3)当风向角等于0°(或360°)时,表明机舱已处于准确对风位置,若5s内风向
角处于-15°~15°,属于风向最优正常运行范围,偏航系统不做任何调节。
4)当风向角大于15°或小于-15°限值时,延时20s,若风向角仍然处于持续超限,根据风向角差值进行函数计算,给出偏航指令,实现PID偏航调节。
5)为了有效地防止风机出现电缆缠绕,当风向角大于180°时,机舱顺时针自
动对风偏航;当风向角小于180°时,机舱逆时针自动对风偏航(机舱6)偏航电机启
动同时,偏航计时器也进行计时启动,若在偏航电机运转规定时间(按偏转360°时间整定)内,机舱对风正常,向中心控制器发出自动偏航完成信号,并复位自动偏
航标志位;若计时器的计算时间超过偏转360°所需时间,偏航电机仍未停止工作,则停止偏航,向中心控制器发出安全停机信号和风向标故障信号。
7)偏航动作完成后,偏航动作时阻尼力矩半刹车状态4.5~5.0MPa液压迅速
恢复至制动状态15~17MPa压力,以提供足够制动力矩,确保刹车片紧压在刹车盘上。
1.2.2自动解缆控制过程
1)在偏航调节过程中,机舱带控制信号的角位移传感器负责检测记录偏航系
统旋转角度。
2)当机舱旋转位移角度上限达到540°或下限达到-540°,且发电机输出功率
小于100kW及风速小于5m/s状态下,则机组停机功能动作,停机,实施停机解
缆动作。
3)当机舱旋转位移角度上限达到648°或下限达到-648°,且发电机输出功率
小于400kW时,则机组停机功能动作,停机,实施停机解缆动作。
4)当机舱旋转位移角度上限达到756°或下限达到-756°时,则机组停机功能
立刻动作,停机,实施停机解缆动作。
2偏航余压动态控制
2.1基本原理
偏航余压的动态调节通过偏航液压站中马达、管路以及阀块作用实现。
其基本控制原理如下:
1.油温传感器;2.偏航电机;3.驱动泵站;4.过滤器;5.单向阀;6.蓄能
器;7.压力开关;8.溢流阀;
9.电磁换向阀;10.溢流阀;11.电磁阀;12.节流阀;13.活塞.图1偏航控制原理
偏航电机(2)驱动泵站(3)的油液经过滤器(4)、溢流阀(8,其中超过16MPa溢流)进入电磁换向阀(9)位置,此时因电磁阀(11)处于右位,在偏航液压站马达驱动下
偏航卡钳靠压力锁紧机舱与塔筒连接处,保证机组在风载下不发生被动偏航。
卡
钳处压力大于16MPa时,压力开关(7)动作,主控下发指令停止偏航液压站建压,维持机组在16MPa下的制动压力实现全压制动.在机组对风偏航时,电磁换向阀(9)切换阀块位置,活塞(13)中油液经溢流阀(10)维持1.5MPa的偏航余压,保证偏
航过程中机组的稳定性.但机组零压解缆偏航时,电磁阀(11)切换至左位,此时
油液直接回油箱,机组偏航制动处压力为零,维持零压偏航。
通过上述原理可见,机组的控制中仅靠溢流阀(10)维持1.5MPa的偏航余压,并未对偏航余压阀的动作
时间做限制,而电磁换向阀(9)可受控,因此偏航卡钳处的余压可通过设定电磁换
向阀(9)的开启时间长短来进行余压限制.故机组偏航余压动态控制可以通过时间
设定,维持偏航卡钳在合理的余压水平下,保证在偏航动作前、动作过程中以及
偏航结束后,机组偏航稳定且偏航电机与偏航轴承齿间无频繁撞击磨损。
2.2控制方法
机组的偏航卡钳由泵站压力推动活塞实现偏航刹车片的夹紧,通过摩擦片产
生的摩擦力实现机舱的稳定。
当泄压时,卡钳内部弹簧实现活塞的复位。
为了保
证偏航余压至少为1.5MPa,弹簧复位时最小弹力大于余压阀给定的油液压力。
在余压偏航动作开始,瞬时加速度最大,速度最小,单位时间内其位移也最小,导
致产生的压强差ΔP变小;在活塞到达止位,余压阀作用下压力最小为1.5MPa,因
受活塞位置限值,在接近活塞最大位移时,瞬时加速度接近0,速度最大,单位
时间内位移最大,导致产生的压强差变大。
一般情况下,机组卡钳余压的摩擦力
矩足以克服小风条件下风载,但大风下因余压不足会出现不同程度机舱“跑飞”情况。
因此,为了满足风机在整个运行风速区间内都能够保证机组的平稳偏航并避
免振动类故障的发生和机舱“跑飞”情况,需要对实际风速进行采集分析,研究不
同风速下的余压控制时间及偏航余压阀开启时间,实现对偏航余压阀余压的控制。
一般风速8m•s-1左右机组会出现变桨动作,若此时偏航会出现“爬行”现象,不
仅机舱会存在较大的加速度冲击,叶轮加速度出现跳变,而且偏航齿圈外齿和偏
航电机减速器外齿啮合处会产生机械冲击,导致外齿磨损加剧,增加了偏航轴承
和偏航电机的疲劳载荷,降低了使用寿命,严重时会发生断齿情况。
而22m•s-
1风速时机组出于保护一般会脱网,执行安全停机.此时桨距角处于顺桨状态,
机组偏航载荷以及整机载荷较小,不需要考虑余压阀的时间控制.故在8~
22m•s-1风速区间内,余压阀响应的时间最长为1s,据此构建风速-时间曲线。
在风速大于8m•s-1时余压阀开启时间T0小于1s,使得偏航余压值大于余压阀
溢流值1.5MPa,卡钳处余压不完全释放,实现了动态余压控制。
机组偏航完成后,根据风速变化情况,当处于大风条件时,主控根据是否有偏航指令调整不同风速
下余压阀开启时间,这个开启时间作为下次偏航时偏航余压响应时间;当风速变小时,主控给定余压阀一个延时时间大于5s的T1,使得卡钳完全释放以保持
1.5MPa的偏航余压,下次偏航时继续前述的判定逻辑。
参考文献:
[1]曾声奎,吴际.故障预测与健康管理(PHM)技术的现状与发展[J].航空学
报,2018(5):626-631.
[2]李勇东,中国风力发电的发展现状和前景[J].电气时代,2017(13):16-20.。