阿基米德螺线讲解
浅谈阿基米德螺线
摘要:
本文从生活中有趣的自然现象出发,介绍了阿基米德螺线的发现、定义、方程、作图以及自然界和实际生活中的应用,浅谈了对于阿基米德螺线定义的不同观点,并以蚊香为例,建模,证明了阿基米德螺线应用的广泛性。
关键词:
阿基米德螺线、极坐标、自然界实例,生活中应用
引言
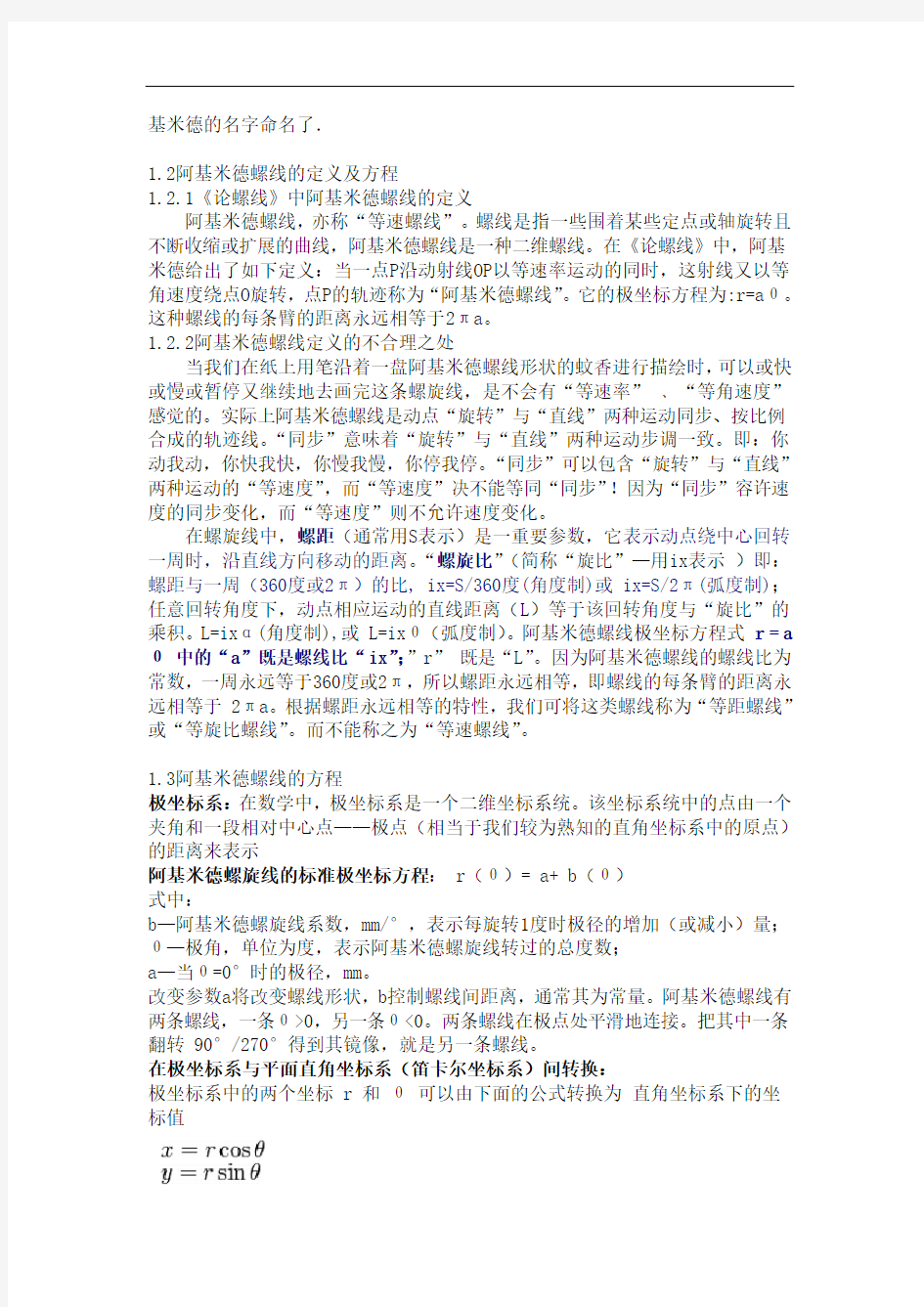
很多人都知道飞蛾扑火这个故事。但是,为什么飞蛾会这么执着地扑向火光呢?这要从它的祖先谈起。飞蛾的历史远比人类悠久。在亿万年前,没有人造火光,飞蛾完全靠天然光源(日光、月光或星光)指引飞行。由于太阳、月亮、星星距离地球都很远,它们发出的光线照到地球上可以认为是平行直线。当飞蛾直线飞行时,它在任何位置的前进方向与光线的夹角都是一个固定值(如图1)。可是,如果光源离得很近,不能将它们发出的光线看作平行光时,飞蛾再按照固有的习惯飞行,飞出的路线就不是直线,而是一条不断折向灯光光源的螺旋形路线(如图2)。这在数学上称为阿基米德螺线。通俗的说,阿基米德螺线就是既作匀速转动又作匀速直线运动而形成的轨迹。举一个形象一点的例子:时钟上的指针在作匀速转动,假如有一只小虫子从时钟的中心,沿指针作匀速爬动,那么虫子最终走出的轨迹就是阿基米德螺线(如图3)。
1.阿基米德螺线简介
1.1阿基米德简介及螺线的发现
阿基米德 Archimedes(约公元前287~前212),古希腊伟大的数学家、力学家。他公元前287年生于希腊叙拉古附近的一个小村庄.11岁时去埃及,到当时世界著名学术中心、被誉为“智慧之都”的亚历山大城跟随欧几里得的学生柯农学习,以后和亚历山大的学者保持紧密联系,因此他算是亚历山大学派的成员。公元前240年,阿基米德由埃及回到故乡叙拉古,并担任了国王的顾问.从此开始了对科学的全面探索,在物理学、数学等领域取得了举世瞩目的成果,成为古希腊最伟大的科学家之一.后人对阿基米德给以极高的评价,常把他和牛顿、高斯并列为有史以来三个贡献最大的数学家。
据说,阿基米德螺线最初是由阿基米德的老师柯农(欧几里德的弟子)发现的.柯农死后,阿基米德继续研究,又发现许多重要性质,因而这种螺线就以阿
基米德的名字命名了.
1.2阿基米德螺线的定义及方程
1.2.1《论螺线》中阿基米德螺线的定义
阿基米德螺线,亦称“等速螺线”。螺线是指一些围着某些定点或轴旋转且不断收缩或扩展的曲线,阿基米德螺线是一种二维螺线。在《论螺线》中,阿基米德给出了如下定义:当一点P沿动射线OP以等速率运动的同时,这射线又以等角速度绕点O旋转,点P的轨迹称为“阿基米德螺线”。它的极坐标方程为:r=aθ。这种螺线的每条臂的距离永远相等于2πa。
1.2.2阿基米德螺线定义的不合理之处
当我们在纸上用笔沿着一盘阿基米德螺线形状的蚊香进行描绘时,可以或快或慢或暂停又继续地去画完这条螺旋线,是不会有“等速率”﹑“等角速度”感觉的。实际上阿基米德螺线是动点“旋转”与“直线”两种运动同步、按比例合成的轨迹线。“同步”意味着“旋转”与“直线”两种运动步调一致。即:你动我动,你快我快,你慢我慢,你停我停。“同步”可以包含“旋转”与“直线”两种运动的“等速度”,而“等速度”决不能等同“同步”!因为“同步”容许速度的同步变化,而“等速度”则不允许速度变化。
在螺旋线中,螺距(通常用S表示)是一重要参数,它表示动点绕中心回转一周时,沿直线方向移动的距离。“螺旋比”(简称“旋比”—用ix表示)即:螺距与一周(360度或2π)的比, ix=S/360度(角度制)或 ix=S/2π(弧度制);任意回转角度下,动点相应运动的直线距离(L)等于该回转角度与“旋比”的乘积。L=ixα(角度制),或 L=ixθ(弧度制)。阿基米德螺线极坐标方程式r = a θ中的“a”既是螺线比“ix”;”r”既是“L”。因为阿基米德螺线的螺线比为常数,一周永远等于360度或2π,所以螺距永远相等,即螺线的每条臂的距离永远相等于2πa。根据螺距永远相等的特性,我们可将这类螺线称为“等距螺线”或“等旋比螺线”。而不能称之为“等速螺线”。
1.3阿基米德螺线的方程
极坐标系:在数学中,极坐标系是一个二维坐标系统。该坐标系统中的点由一个夹角和一段相对中心点——极点(相当于我们较为熟知的直角坐标系中的原点)的距离来表示
阿基米德螺旋线的标准极坐标方程: r(θ)= a+ b(θ)
式中:
b—阿基米德螺旋线系数,mm/°,表示每旋转1度时极径的增加(或减小)量;θ—极角,单位为度,表示阿基米德螺旋线转过的总度数;
a—当θ=0°时的极径,mm。
改变参数a将改变螺线形状,b控制螺线间距离,通常其为常量。阿基米德螺线有两条螺线,一条θ>0,另一条θ<0。两条螺线在极点处平滑地连接。把其中一条翻转 90°/270°得到其镜像,就是另一条螺线。
在极坐标系与平面直角坐标系(笛卡尔坐标系)间转换:
极坐标系中的两个坐标 r 和θ可以由下面的公式转换为直角坐标系下的坐标值
由上述二公式,可得到从直角坐标系中x 和 y 两坐标如何计算出极坐标下的坐标
在x=0的情况下:若y为正数,则θ=90°(π/2radians);若y为负,则θ=270°(3π/2radians).
1.4阿基米德螺线的画法
1.4.1阿基米德螺线的几何画法
以适当长度(OA)为半径,画一圆O;作一射线OA;作一点P于射线OA上;模拟点A沿圆O移动,点P沿射线OA移动;画出点P的轨迹;隐藏圆O、射线OA&点P;即可得到螺线(如图4)
1.4.2阿基米德螺线的简单画法
有一种最简单的方法画出阿基米德螺线,如图4,用一根线缠在一个线轴上,在其游离端绑上一小环,把线轴按在一张纸上,并在小环内套一支铅笔,用铅笔拉紧线,并保持线在拉紧状态,然后在纸上画出由线轴松开的线的轨迹,就得到了阿基米德螺线。
2.自然界中的阿基米德螺线
2.1自然界中的多种多样的螺线
在浩瀚的自然界中,在千姿百态的生命体上发现了不少螺旋。如原生动物门中的砂盘虫;软体动物门中梯螺科中的尖高旋螺,凤螺科中的沟纹笛螺,明螺科中的明螺,又如塔螺科的爪哇拟塔螺、奇异宽肩螺、笋螺科的拟笋螺等大多数螺类,它们的外壳曲线都呈现出各种螺旋状;在植物中,则有紫藤、茑萝、牵牛花等缠绕的茎形成的曲线,烟草螺旋状排列的叶片,丝瓜、葫芦的触须,向日葵籽在盘中排列形成的曲线;甚至构成生命的主要物质——蛋白质、核酸及多糖等生物大分子也都存在螺旋结构,如人类遗传基因(DNA)中的双螺旋结构。其中,自然界中的砂盘虫化石,蛇盘绕起来形成的曲线等都可以构成阿基米德螺线。
2.2自然界中螺线广泛存在的原因
拟螺线之所以在生命体中广泛存在,是由于螺线的若干优良性质所确定。而这些优良性质直接或间接地使生命体在生存斗争中获得最佳效果。由于在柱面内过柱面上两点的各种曲线中螺线长度最短,对于茑萝、紫藤、牵牛花等攀缘植物而言,如何用最少的材料、最低的能耗,使其茎或藤延伸到光照充足的地方是至
阿基米德螺线图形设计_Java基础实验报告
南京工程学院 实验报告 课程名称 JAVA基础 实验项目名称图形用户界面设计 实验题目阿基米德螺线图形设计 实验学生班级网络132 实验学生姓名薛康威 学号 202130834 实验时间 2015.5.25 实验地点信息楼 实验成绩评定 指导教师签字年月日
一、实验目的和要求 掌握Java Swing组件的使用方法,理解委托事件处理模型,掌握多种布局方式,掌握窗口菜单和快捷菜单设计方式,熟悉在组件上绘图的方法,设计出具有图形用户界面的、能够响应用户界面的、能够响应事件并处理异常的Java应用程序。要求如下: (1)采用Swing组件设计图形用户界面,使用3个以上相同组件要声明组件数组。 (2)响应事件。 (3)异常处理,当输入数据错误时,弹出对话框,提示重新输入信息。 二、实验题目 阿基米德螺线图形设计,指定图形大小、位置和颜色。 三、实验方法与步骤(需求分析、算法设计思路、流程图等) (1)需求分析 这个程序主要由两大块组成,自定义图形用户界面和阿基米德螺线图形算法。 (2)算法设计思路 首先是界面设计。内容窗格采用边布局,North处添加设置面板,Center处添加画布。其中设置面板采用流布局,添加设置圈数的文本框、选择颜色的单选按钮和最终“确定”的按钮。 其次是阿基米德螺线图形算法。根据数学公式r = aθ,转换成直角坐标方程组后,在图形类Graphics中标点填充即可。 最后便是事件处理。在按钮“确定”上注册事件监听,在响应方法里获得圈数(需要做异常处理)、颜色的参数,并调用画布类,将阿基米德螺线画出。
四、实验原始纪录(源程序、数据结构等) import java.awt.*; import java.awt.event.*; import javax.swing.*; public class ArchimedesJFrame extends JFrame implements ActionListener{ private ArchimedesCanvas archimedes; //画布类声明 private JButton jb3; private JPanel jp1; private JTextField text_q; private JRadioButton bcolor[]; private double n; public ArchimedesJFrame(){ super("阿基米德螺线"); Dimension dim=getToolkit().getScreenSize(); this.setBounds(dim.width/4,dim.height/4,dim.width/2,dim.height/2); this.setDefaultCloseOperation(EXIT_ON_CLOSE); text_q=new JTextField(10); jp1=new JPanel(); jp1.add(new JLabel("圈数:")); jp1.add(text_q); jb3=new JButton("确定"); jp1.add(jb3); jb3.addActionListener(this); String lk[]={" "," "}; for(int i=0;i 钢桶卷边剖析 海南省金鼎实业发展总公司丁进义 近年来有关钢桶卷边的文章很多。通过学术讨论使我们对钢桶卷边的认识不断地深化,对提高我国钢桶卷边质量是颇有好处的。笔者在此就卷边问题提出自己看法。 一、卷边基本概念 卷边最初的含义是:为了提高薄壁零件边缘刚性和强度,将其边缘卷曲的工作叫卷边,如图1所示。在手工制作铁水桶等日用杂品上,经常采用这种卷边。 图1 卷边图 本文所指的卷边实际上是一种咬合形式。咬合一般分为平面咬合和折角咬合。 平面咬合是把两块钢板的边缘(或一块板的两个边缘)折转扣合,并彼此压紧。平面咬合又称咬缝或咬口。这种咬缝较牢靠,不少地方代替了钎焊。在小桶(或小罐)生产中经常用在桶身(或罐身)两边的咬缝。 平面咬合分半咬和整咬。咬缝分立缝单扣、立缝双扣、卧缝挂扣,卧缝单扣、卧缝双扣等,如图2所示。 图2 平面咬合 桶身的咬缝主要是采用卧缝挂扣。卧缝单扣和卧缝双扣主要用在建筑上,如屋顶排水沟。折角咬合(如图3所示)是我们讨论的重点。 图3 折角咬合 钢桶卷边外形根据其用途不同可分为矩形、圆形、梯形、三角形等。根据重叠次数又分为二重卷边和三重卷边。 钢桶的卷边是桶身和桶顶底折角咬合的一种工序。通过滚压形式用若干个卷封轮将桶身和桶顶(底)咬合在一起达到设计所要求的结构和尺寸。一般要求卷边有一定的密封性,有良好的抗渗漏性能和抗冲击能力,从而,保证钢桶在运输、贮存中能承受各种形式的碰撞、跌落。过去由于我国钢桶卷边质量不过关造成渗漏事故,损失很大。近年来,各制桶厂努力学习和掌握先进的卷边技术,消化和吸收国际先进卷边技术使我国,钢桶卷边质量跨入国际先进行列。 二、卷边对金属材料的要求 卷边用金属板材必须有良好的可塑性。金属的可塑性是指在外力作用下金属,产生永久变形的能力。金属的塑性一般可由两个方面来反映,一个叫 浅谈阿基米德螺线 摘要: 本文从生活中有趣的自然现象出发,介绍了阿基米德螺线的发现、定义、方程、作图以及自然界和实际生活中的应用,浅谈了对于阿基米德螺线定义的不同观点,并以蚊香为例,建模,证明了阿基米德螺线应用的广泛性。 关键词: 阿基米德螺线、极坐标、自然界实例,生活中应用 引言 很多人都知道飞蛾扑火这个故事。但是,为什么飞蛾会这么执着地扑向火光呢?这要从它的祖先谈起。飞蛾的历史远比人类悠久。在亿万年前,没有人造火光,飞蛾完全靠天然光源(日光、月光或星光)指引飞行。由于太阳、月亮、星星距离地球都很远,它们发出的光线照到地球上可以认为是平行直线。当飞蛾直线飞行时,它在任何位置的前进方向与光线的夹角都是一个固定值(如图1)。可是,如果光源离得很近,不能将它们发出的光线看作平行光时,飞蛾再按照固有的习惯飞行,飞出的路线就不是直线,而是一条不断折向灯光光源的螺旋形路线(如图2)。这在数学上称为阿基米德螺线。通俗的说,阿基米德螺线就是既作匀速转动又作匀速直线运动而形成的轨迹。举一个形象一点的例子:时钟上的指针在作匀速转动,假如有一只小虫子从时钟的中心,沿指针作匀速爬动,那么虫子最终走出的轨迹就是阿基米德螺线(如图3)。 1.阿基米德螺线简介 1.1阿基米德简介及螺线的发现 阿基米德 Archimedes(约公元前287~前212),古希腊伟大的数学家、力学家。他公元前287年生于希腊叙拉古附近的一个小村庄.11岁时去埃及,到当时世界著名学术中心、被誉为“智慧之都”的亚历山大城跟随欧几里得的学生柯农学习,以后和亚历山大的学者保持紧密联系,因此他算是亚历山大学派的成员。公元前240年,阿基米德由埃及回到故乡叙拉古,并担任了国王的顾问.从此开始了对科学的全面探索,在物理学、数学等领域取得了举世瞩目的成果,成为古希腊最伟大的科学家之一.后人对阿基米德给以极高的评价,常把他和牛顿、高斯并列为有史以来三个贡献最大的数学家。 据说,阿基米德螺线最初是由阿基米德的老师柯农(欧几里德的弟子)发现的.柯农死后,阿基米德继续研究,又发现许多重要性质,因而这种螺线就以阿 毕业论文(设计)螺旋输送机的设计 院系: 专业: 年级(班级): 姓名: 学号: 指导教师: 职称: 完成日期: 摘要 螺旋输送机是利用电动机带动螺旋轴转动,使螺旋推移物料从而实现输送目的的机械,它能水平、倾斜或垂直输送,适合短距离输送,具有结构结构简单、体积紧凑、占地面积小、易于密闭、操作和管理方便等优点。 本次任务是设计一台水平输送小麦、水稻等种类粮食螺旋输送机,输送量为30t/h,输送距离为8米,室内外均能适应。重点研究在与驱动装置的合理选择,驱动装置的合理给螺旋输送机的效率、稳定、安全性的提高都有比较大的作用。尽可能发挥其本有的运输特点,尽可能的减小物料输送的阻力,尽可能不要让物料与螺旋叶片黏结而使输送机失去其输送的能力。 本设计阐明了螺旋输送机的工作原理。根据输送量和传输距离确定的螺杆直径,求出所需要的最低螺旋功率,从而根据螺旋功率选择电机、减速器、联轴器。 关键词:螺旋输送机;螺旋轴;连续运输 Abstract Screw conveyor is the use of motor driven screw axis rotation, the spiral passage materials so as to realize the purpose of mechanical transmission, it can be horizontal, inclined or vertical transmission, suitable for short distance transportation, has the advantages of simple structure, compact structure, cover an area of an area small, easy to sealed, convenient operation and management. The mission is to design a horizontal conveying of wheat, rice and other kinds of food screw conveyor, the throughput of 30 t/h, conveying distance is 8 meters, inside and outside are able to adapt to. Key research in with the reasonable choice of drive, drive the reasonable for screw conveyor in the efficiency, stability and security of all has a bigger role. As far as possible the transport of its characteristics, as far as possible the reduction of the resistance of the material conveying, as far as possible, don't let the material and the spiral vane bond and make the conveyor to lose its ability to deliver. This design illustrates the working principle of screw conveyor. According to throughput and transmission distance of the screw diameter, and the minimum needed to spiral power, so as to choose according to the spiral power motor, reducer, coupling. Keywords: screw conveyor;screw axis;continuous transportation 阿基米德螺线浅析 作者:姜荣 200911181013 环境学院09级黄鲁霞 200911181004 环境学院09级荣镭 200911181017 环境学院09级 摘要: 本文就自然界中阿基米德螺线的存在,探讨了它的产生、原理、性质。并对阿基米德螺线在生活中的应用进行了说明。 关键词:阿基米德螺线产生原理性质应用 Abstract: This paper mainly discuss the cause, the principium and the habitude of Archimedes spiral because of its existence in nature. In addition, we make some introductions to its application in our daily life. Key words: Archimedes spiral cause principium habitude application 引言: 阿基米德与阿基米德螺线 Archimedes(阿基米德)是古希腊数学家、力学家。 他在数学、物理方面都有极高的成就。 公元前287年,阿基米德出生于西西里岛(Sicilia)的叙拉古(Syracuse)(今意大利锡拉库萨)。他出生于贵族,与叙拉古的赫农王有亲戚关系,家庭十分富有。阿基米德的父亲是天文学家兼数学家,学识渊博,为人谦逊。他十一岁时,借助与王室的关系,被送到古希腊文化中心亚历山大里亚城,跟随欧几里得的学生埃 拉托塞和卡农学习,他以后和亚历山大的学者保持紧密联系,因此他算是亚历山大学派的成员。 阿基米德螺线 阿基米德螺线ρ=aθ 极坐标图形的绘制 数学原本不是枯燥的学科,只有真正喜欢数学,才会体会数学中的美,可是在功利化教育体制下,在应试教育的大棒下,数学的美已经被叠套拷贝类型题的海洋淹没,在公式和数字的背后留下的只是枯燥、乏味、深奥和不可琢磨。很多学生畏惧数学,应该说不全是学生本身的问题。高层次的涉及体制的问题,我们高不可攀,学子们对数学的遗憾、怨叹乃至于 憎恨,目前还是应该由教师的教学的手段和方法去化解。 数学中的有些内容,理论性较强,初学者较难很快接受,其中极坐标就是一例。其实极坐标及其涉及的螺线,不仅不枯燥不乏味,而且对其的探索,能很有力地展现数学的美。 极坐标的概念出现在高中数学中,但鉴于该内容在高考所占比例较少,限于许多学校数学教学手段、方法比较传统,极坐标的教学内容比较简单,涉及螺线部分,更是单薄。现在 可以使用Excel图表工具,轻松地将各种螺线画出,数形结合,研究其性质。 螺线种类很多,最具有代表性的就是阿基米德螺线。关于阿基米德螺线的运用可见【注】。 古希腊数学家阿基米德(前287,前212)不只对物理做出了贡献,他的几何学研究也称得上是希腊数学的巅峰。他不光研究圆、椭圆、抛物线、旋转抛物体,还提出了一种特殊的螺旋线,这种螺旋线由两种运动形成:设想一个虫子站在匀速旋转的圆盘之上,从圆心沿某个半径向外爬行,它的影子会在天花板上绘出一条螺线。这螺线就是阿基米德螺线。 阿基米德螺线又称“等速螺线”。当一点P沿动射线OP用速度v做等速率直线运动的同时,这条射线又以等角速度ω绕点O旋转,点P的轨迹称为“阿基米德螺线”,其极坐 标表示式是: ρ,aθ 这里a为实数,ρ是点P到极点的距离,θ是用弧度表示的射线与极轴的夹角。 尤其注意的是:角θ是以弧度表示的角。弧度这一概念在高一数学中介绍过。初接触弧度制时,不少学生是在朦朦胧胧中接受的,知其然不知其所以然:角度蛮好的嘛,为什么要用弧度,弧度、弧度搞得人糊里糊涂。而在这里实际作图时,可以理解弧度作为实数可以和实数a相乘了,可以作出美丽的曲线了,如果是沿袭角度制,两者相乘,那其结果就不伦 不类、风马牛不相干了。解决了过去的悬念,可以“知新而温故”。 另外之所以称之为等速螺线,是因为点P做等速直线运动、射线做等角速度圆周运动, 两项运动的时间都为t,则: 点P沿动射线OP用速度v做等速率直线运动,则ρ,vt; 而同时,射线OP又以等角速度ω绕点O旋转, 则θ,ωt。 Excel图表没有专门的极坐标作图图形类别,要从极坐标转化为直角坐标: X,ρCOSθ Y,ρSINθ 以下以画出ρ,10θ图形为例(a=10)。 【步骤01】设置数据表: 专题库使用说明 机械制造工程学是研究机械加工机理与规律、工艺系统的组成与功能的一门科学,是机械工程专业的主干必修课程,具有综合性、系统性、实践性等特点。本课程从培养学生在机械制造方面的综合素质出发,以机械制造工艺为主线,以优质、高效、低成本为目标,将加工原理、加工质量控制、加工工艺与装备等有机地结合起来,形成宽结构、重素质、强实践的课程结构体系。 机械制造工程学课程内容是由原机械制造专业三门课程(切削原理及刀具;机床;工艺与夹具)整合而成。由于本课程涉及知识面宽、内容多、学时又不断压缩,造成教学过程的教与学“两方为难”的现实。在国家实施“高等学校本科教学质量与教学改革工程”、我校建设研究型大学的背景下,研究新的教学方法对提高课程教学质量和人才培养质量具有重要意义。 在机械制造工程学课程教学中开展“专题驱动式”教学法实践,就是在讲授课程基本内容的前提下,选择适合深入研究(设计)的内容(包括由于课时限制,课堂不讲的课程内容),以不同形式的专题,提供给学生个人或团队进行自主研究。通过相关文献资料的检索、调研、试验、设计计算等过程,培养学生综合利用相关知识、手段和技能,分析解决生产实际问题的能力。以期做到:专题驱动兴趣、专题驱动创新、专题驱动能力、专题驱动发展。 考虑到学生的兴趣和擅长,做到因材施教,将专题设计为学术研究型(A)和工程应用型(B)两类。前者主要侧重制造过程中机理、基本规律以及加工质量的控制;后者主要侧重工艺参数设计计算及优化、工艺规程 与工装的设计。 在课程学习过程中,学生根据个人兴趣和擅长,从专题库中选择某一专题开展研究(设计),并利用业余时间完成。课程结束后一周内提交研究论文、报告,图纸、工艺文件等,论文、报告题目可根据专题内容自拟)。可以将两个内容相关的简单的专题融合为一个专题研究;有一定难度的专题可以2人一组共同完成;同一专题重复研究不超过3组(应体现不同的视角、不同的方法、不同的方案)。各班学习委员要掌握专题选的选择动态,课程结束前将专题选择结果报给任课老师。 在课程结束后、考试前,教师根据专题完成情况选择一定数量的专题,组织同学汇报并点评。专题完成的质量将以一定的比例记入课程成绩。 一、切削加工基础 1-1 切削运动与切削用量分析(基本定义;各主要加工方法的切削运动与切削用量) 1-2刀具注角度和工作角度(基本概念;标注角度→工作角度的变化规律分析) 1-3 复合成形运动与简单成形运动。加工如图1-1所示三维自由曲面的成形原理,并且进一步机床上的实现方法。 专题21 力学综合训练(四) 一、选择题 1.(2019广西北部湾)“足球进校园”活动的开展,使同学们越来越喜欢足球运动,下列现象不属于力改变物体运动状态的是() A.足球在空中沿弧线飞行B.足球在草地上越滚越慢 C.被踩在脚下的足球变扁D.守门员抱住飞来的足球 【答案】C 【解析】A.足球在空中沿弧线飞行时由于运动方向在不断改变,说明足球的运动状态发生了变化,故A 属于力改变物体运动状态的情形;B.足球在草地上越滚越慢,说明足球的速度变小,即运动状态发生了变化,故B属于力改变物体运动状态的情形;C.被踩在脚下的足球变扁,说明在力的作用下足球发生了形变,属于力改变物体的形状的情形;D.守门员抱住飞来的足球,说明足球的速度变小了,即运动状态发生了变化,故D属于力改变物体运动状态的情形。故选C。 2.(2019·四川巴中)下列列关于力说法正确的是( ) A.空中自由下落的小球速度越来越快,小球的惯性力越来越大 B.踢足球时脚对足球的力和足球对脚的力是一对平衡力 C.力的大小、方向和作用点都可能影响力的作用效果 D.物体的重心一定在物体上 【答案】C 【解析】A.物体保持原来运动状态不变的性质叫惯性,惯性只与质量有关,且惯性不是力,故A错误;B.踢足球时脚对足球的力和足球对脚的力是作用在两个物体上,是相互作用力,不是一对平衡力,故B错误;C.力的大小、方向和作用点称为力的三要素,都会影响力的作用效果,故C正确;D.重心不一定在物体上,如空心的球,铁环等,故D错误。故选C。 3.(2019山东德州)如图所示,在“测量花岗石密度”的实验中。下列说法正确的是() A.称量时左盘放砝码,右盘放花岗石 母线在绕轴线做匀速圆周运动的同时,做匀速或变速轴向运动,母线的运动轨迹形成等螺距或变螺距螺旋面。 螺旋面与同轴的圆柱面或同轴圆锥面的交线,称为圆柱螺线或圆锥螺线。[4] 混凝土搅拌车中常用的螺旋线是直纹正螺旋面和直纹斜螺旋面。 直纹:母线为直线。 正螺旋和斜螺旋:母线与轴线垂直或斜交。 螺旋角 螺旋线上某点(取正对着的那一点)的切线与圆柱面或圆锥面的母线之间的夹角称为螺旋角,一般用β表示[6] 升角 螺旋线上某点(取正对着的那一点)的切线与通过该点的圆柱截面在该点的切线之间的夹角,称为螺旋升角,简称升角,常用δ表示[6] ?=+90βδ 相当于在圆柱面上有一张白纸,并转动,铅笔紧靠白纸,并作轴向运动,形成的轨迹,称为螺旋线。把白纸展开,即可得螺旋升角。 图片来自文献[15] 阿基米德螺旋线:螺距相等的螺旋线。 既做匀速转动又做等速直线运动(两速度要同步),而形成的轨迹,称为“阿基米德螺旋”,又称等螺距螺线。[8]圆锥的阿基米德螺线的螺旋角是变化的。[6] 如果选用阿基米德螺线,在筒体的几何参数和螺旋角选定的情况下,螺旋角是从圆锥小端至圆锥大端递增的 对数螺旋线: 对数螺旋线又称等角螺旋线或等升角螺旋线或等螺旋角螺旋线,其螺距是变化的。[6] 如果选择对数螺线,在筒体的几何参数和螺旋角选定的情况下,螺距是随各截面处直径的变化而成正比变化的,这时的螺旋角可以设计为不变。 阿基米德螺旋叶片螺距相等,但是螺旋角不等; 对数螺旋叶片的螺距不相等,但是螺旋角相等。 螺旋角越大,升角就越小,搅拌性能就越差,出料性能越好; 螺旋角越小,升角就越大,搅拌性能就越好,出料性能越差。 搅拌性性能差,容易离析 所以罐车的两头的螺旋角大,中间的螺旋角小。 阿基米德螺线和三等分角 数学家对螺线的探索最早可以追溯到古希腊时代,阿基米德就在他的著作《论螺线》中对等速螺线的性质做了详细的讨论,于是后世的数学家们也把等速螺线称为“阿基米德螺线”。(最早发现等角螺线的其实是阿基米德的老师柯农,在他死后阿基米德继承了他的工作。) 什么是阿基米德螺线呢?想象有一根可以绕着一点转动的长杆,有一只小虫沿着杆匀速向外爬去。当长杆匀速转动的时候小虫画出的轨迹就是阿基米德螺线。阿基米德螺线的方程写成极坐标形式就是ρ = aθ。 阿基米德螺线生活中随处可见。在早期的留声机中,电机带动转盘上的唱片匀速转动,沿着一条直线轨道匀速向外圈移动的唱头在唱片上留下的刻槽就是阿基米德螺线。同理,由匀速盘香机生产出来的盘状蚊香也是阿基米德螺线的形状。等螺距的螺钉从钉头方向看去也是阿基米德螺线。就连缝纫机中也有阿基米德螺线出没,一般的机械缝纫机中有一个凸轮,手轮旋转的时候用来带动缝纫针头直线运动,这个凸轮的轮廓就是把阿基米德螺线的一部分经过对称得到的。 一个很有趣的事情是,在阿基米德螺线的配合下,尺规就能完成三等分一个任意角θ。步骤如下: 1、将θ角的一边与极轴重合,顶点与原点O重合 2、延长角的另一边与阿基米德螺线交于A 3、尺规三等分OA得到三等分点B’、C’ 4、分别以OB’、OC’为半径,O为圆心画圆交螺线于B、C 5、根据ρ=aθ 容易证得OB、OC三等分θ 当然,只利用尺规是无法画出阿基米德螺线的,所以我们大可不必担心关于尺规三等分任意角不可能的证明就此被推倒。 渐开线和机械齿轮 另一种有名的螺线叫做渐开线。当一根绳沿着另一曲线绕上或脱下时,它描出一条渐伸线。许多曲线都有自己的渐开线,把一条没有弹性的细绳绕在一个定圆上,拉开绳子的一端并拉直,使绳子与圆周始终相切,绳子端点的轨迹就是圆的渐开线。 与阿基米德螺线相比,渐开线在日常生活中出场的机会似乎要少一点,但仔细寻找还是能发现它的踪迹,例如棕榈等一些植物叶尖的轮廓就是渐开线。其实它还在机械设备中发挥着重要的作用,机械设备用于传动的齿轮中,就活跃着渐开线的身影。早在1694 年,法国学者就讨论了把渐开线作为齿轮齿形的可能性。1765 年,欧拉对相啮合的一对齿轮齿形曲线的曲率半径和曲率中心位置的关系进行了计算,认为渐开线相当适合作为齿轮的齿形。与其他齿形相比,渐开线齿形具有传动平稳、两轮中心距允许有一定的安装误差等等优点。目前工业中渐开线齿轮被广泛应用,占到世界齿轮市场的90% 以上。 浅谈阿基米德螺线 北京师范大学环境学院 郭惠媛(200911181021)姜畔(200911181023) 摘要: 本文从生活中有趣的自然现象出发,介绍了阿基米德螺线的发现、定义、方程、作图以及自然界和实际生活中的应用,浅谈了对于阿基米德螺线定义的不同观点,并以蚊香为例,建模,证明了阿基米德螺线应用的广泛性。 关键词: 阿基米德螺线、极坐标、自然界实例,生活中应用 引言 很多人都知道飞蛾扑火这个故事。但是,为什么飞蛾会这么执着地扑向火光呢?这要从它的祖先谈起。飞蛾的历史远比人类悠久。在亿万年前,没有人造火光,飞蛾完全靠天然光源(日光、月光或星光)指引飞行。由于太阳、月亮、星星距离地球都很远,它们发出的光线照到地球上可以认为是平行直线。当飞蛾直线飞行时,它在任何位置的前进方向与光线的夹角都是一个固定值(如图1)。可是,如果光源离得很近,不能将它们发出的光线看作平行光时,飞蛾再按照固有的习惯飞行,飞出的路线就不是直线,而是一条不断折向灯光光源的螺旋形路线(如图2)。这在数学上称为阿基米德螺线。通俗的说,阿基米德螺线就是既作匀速转动又作匀速直线运动而形成的轨迹。举一个形象一点的例子:时钟上的指针在作匀速转动,假如有一只小虫子从时钟的中心,沿指针作匀速爬动,那么虫子最终走出的轨迹就是阿基米德螺线(如图3)。 1.阿基米德螺线简介 1.1阿基米德简介及螺线的发现 阿基米德 Archimedes(约公元前287~前212),古希腊伟大的数学家、力学家。他公元前287年生于希腊叙拉古附近的一个小村庄.11岁时去埃及,到当时世界著名学术中心、被誉为“智慧之都”的亚历山大城跟随欧几里得的学生柯农学习,以后和亚历山大的学者保持紧密联系,因此他算是亚历山大学派的成员。公元前240年,阿基米德由埃及回到故乡叙拉古,并担任了国王的顾问.从此开始了对科学的全面探索,在物理学、数学等领域取得了举世瞩目的成果,成为古希腊最伟大的科学家之一.后人对阿基米德给以极高的评价,常把他和牛顿、高斯并列为有史以来三个贡献最大的数学家。 等速螺旋(阿基米德螺线) 一、什么是等速螺旋 1、从点O出发的射线l绕点O作等角速度的转动。 2、同时点M沿l作等速直线运动,点M的轨迹叫等速螺旋 或阿基米德螺线。 二、等速螺线的极坐标方程 1、建立极坐标系 取O点为极点,以l的初始位置为极轴,建立极坐标系如上图。 2、建立参数方程 设点M的初始位置为(ρ0,0),点M在l上的运动速度为v,l绕点O转动的角速度为w,经过时间t后,l旋转了θ角,点M到达位置(ρ,θ)根据螺旋线的定义可得: ρ-ρ0=vt, θ=wt 这就是以时间t为参数的参数方程。 3、建立极坐标方程 参数方程消去t后得:ρ-ρ0=vθ/w 这是所求得的等速螺线的极坐标方程。 设v/w=a 则ρ=ρ0+aθ 此为等速螺线极坐标的一般形式,ρ是θ的一次函数。 特殊情况下,ρ0=0时,ρ= aθ,ρ是θ的正比例函数。 三、ρ=aθ的图像 其中虚线为ρ和θ取负值时的图像 四、等速螺线的笛卡尔坐标系方程 1、极坐标系和直角坐标系的换算公式 x=ρcosθ y=ρsinθ ρ^2=x^2+y^2 tanθ=y/x 2、等速螺线的笛卡尔坐标系方程 由ρ=vt θ=wt 可得x=vtcosθ y=vtsinθ 五、CREO下的参数方程 1、笛卡尔坐标系 第一个例子 s=v*t angle=t*360 x=s*cos(angle) y=s*sin(angle) 图中:v=50 表示螺线的极径在0-50 之间变化,转角在360 度之内,当达到360°时 极径长度为50 当转过90°时, t=90/360=1/4 s=50/4=12.5 当转过180时,t=180/360=1/2,s=50/2=25 第二个例子 s=50*t angle=5*t*360 x=s*cos(angle) y=s*sin(angle) 第三个例子 s=50*t angle=60+3*t*360 x=s*cos(angle) y=s*sin(angle) 第四个例子 s=50*t angle=-60-2*t*360 x=s*cos(angle) y=s*sin(angle) 阿基米德螺旋线三维网技术论坛1 p8 O o$ M1 Q1 n 阿基米德螺旋线的标准极坐标方程为三维网技术论坛; v5 [) k# k& g7 x ρ=at+P0 式中: a—阿基米德螺旋线系数,mm/°,表示每旋转1度时极径的增加(或减小)量;k2 Y6 O% R( J0 c/ a t—极角,单位为度,表示阿基米德螺旋线转过的总度数;三维,cad,机械,技术,汽车,catia,pro/e,ug,inventor,solidedge,solidworks,caxa,时空,镇江1 S; j' z8 [+ w ρo—当t=0°时的极径,mm。三维,cad,机械,技术,汽车,catia,pro/e,ug,inventor,solidedge,solidworks,caxa,时空,镇江1 @: w. p6 J& y" _+ o# ]实例, c+ N s# j: Q, p7 R9 M 图8-1为一个具有阿基米德螺旋线的凸轮,点P1至点P2为第一段阿基米德螺旋线,点P3至点P4为第二段阿基米德螺旋线。三维网技术论坛t( \1 p. h1 n9 I 1.绘图 1)作圆C1和C2三维网技术论坛. J* O7 Y& t8 { 单击“基本曲线”按钮,在弹出的功能工具栏菜单中单击“圆”按钮,选立即菜单中1:圆心_半径,提示圆心点时,输0,0(回车),提示输入半径时,输10(回车)作出R=10的圆C1,提示输入半径时,输12(回车)作出R=12的圆C2,按鼠标右键结束。 因为图形尺寸太小,为了看得更清楚,可将显示的图形放大至屏幕大小。单击屏幕上方常用工具栏中的“动态缩放”按钮,按住鼠标左键,从屏幕下方向上方推动光标时,图形随之放大。三维网技术论坛) I1 H7 _) h# e# N, o 2)作点P1至点P2之间的阿基米德螺旋线三维|cad|机械|汽车|技术|catia|pro/e|ug|inventor|solidedge|solidworks|caxa! h" t$ p1 p: N0 I; X 作图前必需先算出这段阿基米德螺旋线条数a和当极角t=0°时的极径ρo。~# c8 j" H) @( | (1)计算点P1和点P2之间的阿基米德螺旋线系数a P1点的极径为10,P2点的极径为12,P1至P2点转过90°,每转过1度时极径的增大量就是a,故该段的阿基米德螺旋线系数为三维|cad|机械|汽车|技术|catia|pro/e|ug|inventor|solidedge|solidworks|caxa* C% E: M! U2 Q t: e7 L a=(12-10)÷90=0.02222mm/° (2)计算当极角t=0°(即X轴正向)时的极径P0三维网技术论坛# W6 h6 J, F7 a! ?1 r P1点(极角为180°)时的极径P180=10mm,极角每减小1度时极径减小a=0.02222mm/°,当极角减小至t=0°时的极径为P0,计算如下P0=10-180°×a=10-180°×0.02222=6mm三维网技术论坛8 I# E! c/ E) q (3)起始角和终止角三维,cad,机械,技术,汽车,catia,pro/e,ug,inventor,solidedge,solidworks,caxa,时空,镇江4 P* g* x( w4 Y s0 X: _- a 由图8-1中可以直接看出,这段阿基米德螺旋线的起始角为180°,终止角为270°。https://www.360docs.net/doc/e82192056.html,) v4 v1 u' k% s0 q" o( ~9 l& p- J (4)绘图https://www.360docs.net/doc/e82192056.html,( k# b' |! s/ {6 c0 e 单击“高级曲线”按钮,在弹出的功能工具栏菜单中单击“公式曲线”按钮,弹出如图8-2所示的公式曲线对话框,根据图形已知数据特点,应选极坐标系,用光标单击极坐标系前面的小白圆,出现一小黑点,单位选角度,参变量名仍用t表标极角的角度,起始值即起始角输180,终止值即终止角输270,公式名可输P1—P2公式输为P=0.0222222*t+6单击“预显”公式曲线对话框中出现P1至P2两点间的这段阿基米德螺旋线。如图8-2所示,单击“确定”按钮,移动光标时这条绿色的阿基米德螺旋线随光标移动,提示曲线定位点时,输0,0(回车),在P1至P2点之间作出了一条白色阿基米德螺旋线。三维网技术论坛2 j3 m. p7 @: d6 _) a; 机械无级变速器分析 摘要 机械无极变速器传动是指在某种控制的作用下使机器的输出轴转速可在两个极值范围内连续变化的传动装置。能够适应工艺要求多变、工艺流程机械化和自动化发展以及改善机械工作性能。它具有主动和从动两根轴,并能通过传递转矩的中间介质把两根轴直接或间接地联系起来,以传递动力。当对主、从动轴的联系关系进行控制时,即可使两轴间的传动比在两极值范围内连续而任意地变化。 钢球式无极变速器是以钢球作为中间传动元件,通过改变钢球主动侧和从动侧的工作半径来实现输出轴转速连续变化的机械无级变速器。由钢球、主动锥轮、从动锥轮和内环所组成。动力由输入轴输入,带动主动锥轮同速转动,经钢球利用摩擦力驱动内环和从动锥轮,再经从动锥轮,V形槽自动加压装置驱动输出轴将动力输出,调整钢球抽芯的倾斜角就可达到变速的目的。本文分析在传动过程中变速器的主、从动轮,钢球的工作原理和受力关系;通过受力关系分析。 这种无级变速器具有良好的结构和性能优势,具有很强的实用价值,完全可以作为批量生产的无级变速器。其主要特点是:变速范围较宽;恒功率特性好;可以升、降速,正、反转;运转平稳,抗冲击能力较强;使用寿命长;调速简单,工作可靠;容易维修。 关键词:机械无级变速器原理钢球调速 # 绪论 机械无级变速器的概述和应用 机械无级变速器是由变速传动机构、调速机构以及加压装置和输出机构组成的一种传动装置。其功能特征主要是:在输入转速不变的情况下,能实现输出轴的转速在一定范围内连续变化,以满足机器或生产系统在运转过程中各种不同工况的要求。 机械无级变速器转速稳定、滑动率小、具有恒功率机械特性、传动效率较高,能更好地适应各种机械的工况要求及产品需要,易于实现整个系统的机械化、自动化,且结构简单,维修方便、价格相对便宜;特别是某些机械无级变速器可以在很大的变速范围内具有恒功率的机械特性,这是电气和液压无级变速所难以达到的。机械无级变速器的适用范围广,在驱动功率不变的情况下,因工作阻力变化而需要调节转速以产生相应的驱动力矩(如 等角螺线及其它 ?何谓等角螺线 ?等角螺线的方程式 ?趣史一则 ?等角螺线上的相似性质 ?黄金分割与等角螺线 ?等角螺线的弧长 ?等角螺线的再生性质 ?其它螺线举例 几何学是一门源远流长的数学分支,在十七世纪以前,几何学一词甚至可说是数学的同义词,它以往的风光可想而知。曾几何时,因为某些内在与外在的因素,几何学的地位似乎已逐渐没落;在中小学的数学教材里,几何题材一次又一次地被删除。这种现象使我们感到忧心,因为自然环境中隐藏着许多几何原理,不了解这些几何知识,不就表示我们对所生存的空间已经愈来愈不了解了吗? 笔者从事数学教育工作多年,又是现行高中数学教科书的编者之一,对当前高中数学教材中几何题材的过度贫乏,实在感到忧心忡忡。在无力对教科书作大幅度修改的情况下,只好在正式教科书之外从事一些修缮工作。 基于上述想法,笔者希望能以一系列的文章来介绍一些几何题材。在内容方面,笔者首先选上曲线。因为曲线的讨论不仅是几何学中最有趣的题材之一,而且许多曲线都会在自然现象中出现,它们的性质也往往能提供重要的应用。例如:天文望远镜的设计,不就是根据拋物线的反射性质吗?本文介绍等角螺线。 何谓等角螺线 在一片空旷的草地上,甲、乙、丙、丁、四只狗分别站立在一个正方形的四个顶点A、B、C、D上。狗主人要甲狗紧盯着乙狗、乙狗紧盯着丙狗、丙狗紧盯着丁狗、丁狗紧盯着甲狗。一声令下,四只狗以相同的速度同时冲向目标。假定每只狗在每个时刻都是正面朝向它的目标,那么,这四只狗所跑过的路径是什么形式呢? 假设四只狗在某一时刻的位置分别为A1、B1、C1、D1(见图一),则根据四只 狗的行动一致所产生的对称性,可知也是正方形,而且它的中心也就是正方形的中心O。更进一步地,由于在A 点的甲狗系冲向在 MathStudio for iPad 使用方法入门 (35) 阿基米德螺线 2016年5月6日 阿基米德螺线 一动点以常速 v 沿一射线运动,而这一射线又以定角速度ω绕极点O转动时,该动点所描成的轨迹为阿基米德螺线 极坐标方程式ρ=aθ 因为a=v/ω,阿基米德螺线亦称等速螺线 a 与 v 成正比,v 越大,a越大,螺线形状趋宽松 a 与ω成反比,ω越大,a越小,螺线形状趋紧凑 等距性过极点的射线与阿基米德螺线的所有交点, 相邻交点的间隔相等(2πa) 阿基米德螺线与大自然息息相通 ★自然界里像茑萝、紫藤、牵牛花等攀缘植物,为其生存需用最少的材料、最低的能耗,使其茎或藤延伸到光照充足的地方。螺线状态就起到省材、节约能量消耗的作用,在相同的空间中使其叶子获取较多的阳光,有利于进行光合作用。 ★生活在水中的螺类软体动物,来自水流的阻力经锥状螺线能转化变为前进的动力。并且,分布在螺类外壳上的螺线像一条肋筋,大大增加了壳体的强度,也分散了作用在壳体上的水压。 摘自《阿基米德螺线》百度百科 阿基米德螺线 a=1 θ=0~12π 曲线与X轴交点±各6个相邻交点间距=2π 阿基米德螺线 由两支曲线组成 a=0.5 θ=0~12π 曲线与X轴交点±各12个相邻交点间距=π a=0.1 y=0 θ=4π x=2π/5=0.4π a=0.1 y=0 θ=2π x=π/5=0.2π a=0.1 相邻两点角差θ=4π-2π=2π 相邻两交点间隔 x=0.4π-0.2π=0.2π x=2πa a=0.1 y=0 θ=π x= -π/10= -0.1π a=0.1 y=0 θ=3π x=-3π/10=-0.3π 龙源期刊网 https://www.360docs.net/doc/e82192056.html, 试论渐开线与阿基米德螺线的特点与应用 作者:郭文灿 来源:《赢未来》2018年第27期 摘要:渐开线与阿基米德螺线是机械产品的两种基本线,但是由于差别不大,人们往往容易搞错混淆,特别是使用方面差别较大,本文就两种曲线做出一定的对比研究。 关键词:渐开线;阿基米德螺线 渐开线 渐开线如下图所示: 当一根直线在圆周上做纯滚动时,此直线与圆相切点的空间运动轨迹就是此圆的渐开线。此圆称为基圆,直线为KN,点A的轨迹是AK1K2K就是生成的渐开线。 其主要特征是: 1直線的长度等于在基圆上滚过的长度等于即基圆上被滚过的弧长,即NK=NN2N1A; 2.因为发生线在基圆上作纯滚动,所以它与基圆的切点N就是渐开线上K点的瞬时速度中心,发生线NK就是渐开线在K点的法线,同时它也是基圆在N点的切线;渐开线的大小取 决于基圆的大小。基圆内无渐开线。 3.渐开线齿廓上K点的法线与该点的速度方向所夹的锐角称为该点的压力角。齿廓上各点压力角是变化的,K点离圆心越远,压力角越大。 4.切点N是渐开线上K点的曲率中心,NK是渐开线上K点的曲率半径。离基圆越近,曲率半径越小渐开线的形状取决于基圆的大小。基圆越大,渐开线越平直,当基圆半径无穷大时,渐开线为直线; 阿基米德螺线 阿基米德螺线如下图所示: 阿基米德(约公元前287~前212),古希腊伟大的数学家、力学家。阿基米德螺线(阿基米德曲线),亦称"等速螺线"。当一点从圆心出发向外以射线的方式以等速率运动的同时,该射线又以等角速度绕点中心旋转,此点的轨迹称为"阿基米德螺线" 阿基米德螺线的特点是: %阿基米德螺线的动画 clear all close all theta=0:0.1:2*pi; rho=2; h=figure; set(h,'outerposition',get(0,'screensize')); dot2H=line(0, 0, 'marker', '.', 'color', 'k', 'erase', 'none'); hold on quanshu=8; x=0:0.01:rho*quanshu*pi; y=zeros(1,size(x,2)); zhixianH=plot(x,y,'linewidth',6,'color','r') axis([-2*quanshu*pi 2*quanshu*pi -2*quanshu*pi 2*quanshu*pi]) hold on set(zhixianH, 'erase', 'xor'); y=linspace(0,quanshu*pi,500); x=0:0.01:1; dot1H=line(0, 0, 'marker', 'o', 'color', 'k', 'erase', 'xor'); dot2H=line(0, 0, 'marker', '.', 'color', 'k', 'erase', 'none','markersize',40); pause for i=1:length(y) set(zhixianH,'xdata',rho*quanshu*pi*x*cos(y(i)),'ydata',rho*quanshu*pi*x*sin(y (i))); set(dot1H,'xdata',rho*y(i)*cos(y(i)),'ydata',rho*y(i)*sin(y(i))); set(dot2H,'xdata',rho*y(i)*cos(y(i)),'ydata',rho*y(i)*sin(y(i))); line('xdata',rho*y(i)*cos(y(i)),'ydata',rho*y(i)*sin(y(i)), 'color', 'k', 'marker', '.','markersize',40); drawnow end钢桶卷边剖析
阿基米德螺线讲解
螺旋输送机的设计解析
阿基米德螺线浅析word版
阿基米德螺线
机械制造专题库剖析
专题21 力学综合训练(四)(解析版)
阿基米德螺旋线与对数螺旋线1212
阿基米德螺线和三等分角
浅谈阿基米德螺线-北京师范大学数学科学学院
等速螺线
阿基米德螺旋线
机械无级变速器分析
等角螺线及其它详解
MathStudio35 阿基米德螺线分析讲解
试论渐开线与阿基米德螺线的特点与应用
阿基米德螺线动画matlab程序