西门子参数辨识方法(时域法)
西门子S7 300 时间在线设定方法

西门子S7 300 时间在线设定方法
我在网上看过几篇S7 300 PLC时间在线设备的方法,我大体总结了一下,觉得下面的方法比较简单易懂。
为定时器定时首先要弄清时间格式,300 PLC时间格式是S5time 型,这个时间最终要以BCD码来表示,W#16#XXXX,第一个X表示时基,0代表10ms,1代表100 ms ,2代表1 s,3代表10 s,后三个X表示设定的数值0-999,所以定时最大时长9990秒。
时间格式清楚后,你就明白了在上位机上设的十进制数是没办法直接写给时间模块的,因为数据的格式不相同,所以先要进行BCD 码转换,转换出来的是后三个X代表的数值,然后再设定时基,这时要用的指令是字或,这样得到的数就是S5TIME格式。
就这么简间就可以在上位机或触摸屏上设定时间啦,但要注意的是时间不能超限值999,另外,如果直接往时间模块中写S5TIME数值,程序自动地设定最小时基,如果读当前值引起注意。
设定时间的方法很多,我只是写了一个自己理解了的,我想每个人都会有自己喜欢的方法,在这里抛砖引玉希望我们可以交流心得。
讨论一下MM440中SLVC的电机动静态识别

开个小题目,讨论一下MM440中SLVC的电机动静态识别返回主题列表作者主题kdrjl至圣经验值: 14516 发帖数: 10758 精华帖: 157 楼主2008-01-02 21:43:49主题:开个小题目,讨论一下MM440中SLVC的电机动静态识别最近发现,现在版本的MM440优化起来很有趣。
所以萌发了一个展开讨论的想法。
大家谈谈自己是怎么进行变频器与电机辨识的?说说辨识过程,看看谁的方法更便捷。
有利于更好的应用、维护。
引子:什么是电机动静态的辨识?这个问题好像在《找答案》就已经解决了。
首先,电机和变频器的辨识过程,就是变频器针对受控对象电机的建模过程。
静态识别,就是变频器根据调试工程师键入的电机铭牌数据,进行电机内部的参数计算(具体什么参数,说明书中都有交待,这里不赘述),针对具体的执行参数,就是P3900=3或者P340= 1就是静态识别,这一步里只是进行电机参数的计算,电机不通电。
动态识别,就是变频器上电,通过传感器实测的电机电量参数,分析和建立电机的动态控制参数。
他所涉及的执行参数就是P1910=1/3;还有一个参数是P196 0=1(转速调节器的优化)。
在我们按照说明书提出的“快速调试”步骤执行完毕以后,这个系统是优化的好还是不好,有判定标准吗?换句话说,这个系统的电机模型建立的怎么样?怎么评判它呢?记得《网上课堂》里有两篇文章已经有交待了。
只是不知大家是否留意和实践了。
我的体会,借助Drivemonitors的监控,检验合格后的系统,其使用效果很棒。
具体的验证方法就是:1完成快速调试的动静态辨识步骤;2将系统空载运行至80%的额定转速,停止调节,并锁定这个工况;3监控r0084=99-101为合格;r1787=1-5为合格。
当你的辨识后的系统不能满足上述标准的时候,你就要不断地去重复动静态的辨识步骤,直至满足要求为止。
我的问题是,采用什么方法,可以在最便捷的步骤中满足辨识合格的标准呢?也就是说能不能在一两步的辨识中,就满足建模合格的条件呢?哈哈,谁来坐这个沙发?拭目以待了。
同步电机参数辨识方法的评述

同步电机参数辨识方法的评述
李哲生
【期刊名称】《《哈尔滨理工大学学报》》
【年(卷),期】1996(001)001
【摘要】评述了国内学者近年来提出的同步电机瞬态参数在线,离线测量新方法。
给出了每类方法中的时域法和频域法的数学模型,结合试验证评论每类方法的条件,数据处理技术及精度,描述了该领域的发展新动态。
该方法尚未列入国家标准,也非国际电工委员会的标准方法,但大都已在工业试验中得到应用。
【总页数】8页(P45-52)
【作者】李哲生
【作者单位】哈尔滨理工大学
【正文语种】中文
【中图分类】TM341
【相关文献】
1.永磁同步电机参数自动辨识方法 [J], 薛晓明;陈震
2.考虑温度影响的永磁同步电机参数辨识方法 [J], 曹小华;魏恒;王鑫
3.船舶推进永磁同步电机参数在线辨识方法研究 [J], 陈再发;刘彦呈;卢亨宇
4.无位置传感器内置式永磁同步电机参数的在线辨识方法 [J], 张立伟;佘超;李志军;孙铭壑
5.基于高频电压注入的永磁同步电机参数辨识方法 [J], 秦灿华; 高巧玲
因版权原因,仅展示原文概要,查看原文内容请购买。
模态分析作业综述
2在新产品设计中进行结构动态特性的预估和优化设计;
3诊断及预报结构系统的故障;
4控制结构的工作模态分析为例介绍国内外现状传统的实验模态分析与参数辨识技术是基于频率响应函数的测量而展开的, 它要求对实际结构施加一组可控、 可观的激励, 同时测取其响应, 通过输入输出 数据辨识动力学特性。 然而,现代结构遇到的困难是, 研究对象或者无法施加人 工激励,如在轨飞行器等;或者人工激励代价昂贵或有破坏性,如桥梁,高耸结 构、海洋平台等; 或者结构在工作状态下自身承受的环境激励不可测控, 如机翼 颤振、桥梁风振、机床切削颤振以及地震等情形[6]。针对传统的实验模态分析 方法的局限性, 发展仅基于响应数据的工作模态分析技术就显得尤其重要。 采用 工作模态分析技术可以避免对输入信息的采集, 这样也就解决了传统分析方法 中很多状况下输入不可测的问题。
而赋予了瞬时频率合理的定义、物理意义和求法,初步建立了以瞬时频率为表征 信号交变的基本量,以本征模函数为基函数的新时频分析方法体系[4]。具体是
指通过输入装置对结构进行激励,在激励的同时测量结构的响应的一种测试分析 方法。输入装置主要有力锤和激振器,因此,实验模态分析又分为力锤激励EMA技术和激振器激励EMA技术。
而在现代,随着科学技术的发展,工程机械设备不断向着大型化、高速化、
连续化和自动化的方向发展。设备的功能越来越多,性能越来越高,组成和结构 也越来越复杂,在现代化工业生产中所产生的作用和影响越来越大。然而,机械
设备在运行过程中发生任何故障或失效不仅会造成重大的经济损失,甚至可能造
成人员伤亡。因此,在工程运作中,我们需要利用模态分析及时对设备进行故障 诊断以保证工作中的安全性和可靠性。
西门子变频器MM440调试步骤
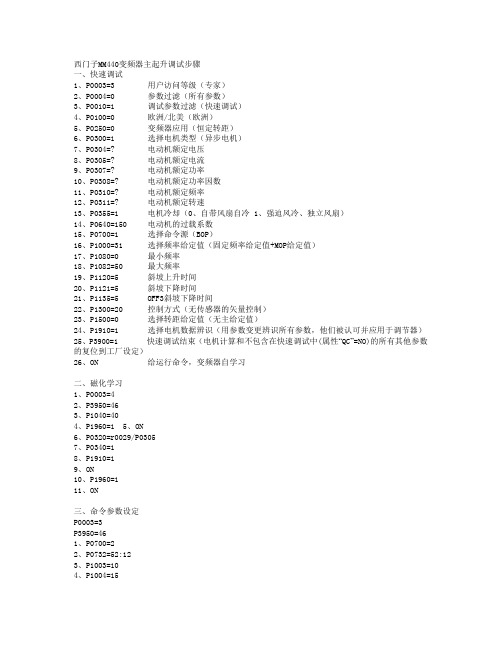
西门子MM440变频器主起升调试步骤一、快速调试1、P0003=3 用户访问等级(专家)2、P0004=0 参数过滤(所有参数)3、P0010=1 调试参数过滤(快速调试)4、P0100=0 欧洲/北美(欧洲)5、P0250=0 变频器应用(恒定转距)6、P0300=1 选择电机类型(异步电机)7、P0304=? 电动机额定电压8、P0305=? 电动机额定电流9、P0307=? 电动机额定功率10、P0308=? 电动机额定功率因数11、P0310=? 电动机额定频率12、P0311=? 电动机额定转速13、P0355=1 电机冷却(0、自带风扇自冷 1、强迫风冷、独立风扇)14、P0640=150 电动机的过载系数15、P0700=1 选择命令源(BOP)16、P1000=31 选择频率给定值(固定频率给定值+MOP给定值)17、P1080=0 最小频率18、P1082=50 最大频率19、P1120=5 斜坡上升时间20、P1121=5 斜坡下降时间21、P1135=5 OFF3斜坡下降时间22、P1300=20 控制方式(无传感器的矢量控制)23、P1500=0 选择转距给定值(无主给定值)24、P1910=1 选择电机数据辨识(用参数变更辨识所有参数,他们被认可并应用于调节器)25、P3900=1 快速调试结束(电机计算和不包含在快速调试中(属性“QC”=NO)的所有其他参数的复位到工厂设定)26、ON 给运行命令,变频器自学习二、磁化学习1、P0003=42、P3950=463、P1040=404、P1960=15、ON6、P0320=r0029/P03057、P0340=18、P1910=19、ON10、P1960=111、ON三、命令参数设定P0003=3P3950=461、P0700=22、P0732=52:123、P1003=104、P1004=155、P1005=156、P1040=107、P0640=120P1080=1P1120=3P1121=3P1237=58、P1215=19、P1216=0.210、P1217=0.511、12、P1240=013、P1511=2889 P1520=P1521=P1755=4P2003=P2800=114、P2889=-45。
系统辨识
相关分析法通常采用类似白噪声的伪随机信号作为输入测试信号,这种信号对系统的正常工作干扰不大。
通常不加专门的输入测试信号,仅利用正常工作状态下测量的输入及输出信号,就可得到良好的辨识效果。
相关分析法辨识抗干扰能力强、数据处理简单、辨识精度高,因此应用比较广泛,尤其是在需要在线辨识的场合。
相关分析法辨识具有最小二乘法辨识的统计特性,即使在有色噪声干扰下,也可以得到无偏估计,这是它和一般最小二乘法相比最大的优点。
在采用相关分析法进行系统辨识时,系统的脉冲响应函数可由系统的输入及输出数据的相关函数来描述,因此,输入信号的选择及相关函数的估计是相关分析法的关键所在。
持续激励输入信号的要求。
更进一步的要求是输入信号必须具有较好的“优良性”,即输入信号的选择应能使给定问题的辨识模型精度最高。
在具体工程应用中,选择输入信号时还应考虑以下因素:输入信号的功率或幅度不宜过大,以免使系统工作在非线性区,但也不应过小,以致信噪比太小,直接影响辨识精度。
工程上要便于实现,成本低。
相关分析法是属于统计分析的方法,它的理论基础就是著名的维纳-霍甫积分方程。
这个方程为积分方程,不易求解,但如果采用白噪声作为系统输入,则可方便的求出系统的脉冲响应。
但是运用白噪声求系统响应,理论上需要无限长时间上的观测数据,这是不希望和不允许的,因此具有人工可以复制的、有规律的、周期性的伪随机信号是更适合应用的。
这种信号具有类似白噪声的性质,目前最常用的是伪随机二位式序列,它们主要有M序列和逆重复M序列,它们可由计算机或线性反馈寄存器产生。
用M序列和逆重复M序列对系统的脉冲响应进行辨识时,都是在离散的时间上进行的。
由它们获得的响应函数是原函数的一致性估计。
为了提高辨识精度,可采用多个周期输入伪随机序列的方法。
当对系统进行在线辨识时,可以采用脉冲响应的递推计算公式。
多变量系统的脉冲响应的辨识问题,最后要归结为用单变量系统辨识方法进行,所不同的只是较复杂。
02SIEMENS6SE70参数设置
Propared by Liu Jianyong 2011-Oct.
13
参数设定_简单应用
Electrical Training
Propared by Liu Jianyong -Oct.
14
参数设定_专家设置
电子箱及电子板的安装
Electrical Training
Propared by Liu Jianyong 2011-Oct.
M - Minimum and Maximum Speed
• 最大频率正向P452,反向P453
A - Accel Time 1 and Decel Time 1
• 加速时间 P462,加速时间单位P463 • 减速时间 P464,减速时间单位P465
R - Reference Source
28
参数设定_系统设置
Electrical Training
Propared by Liu Jianyong 2011-Oct.
29
参数设定_系统设置
Electrical Training
Propared by Liu Jianyong 2011-Oct.
30
参数设定_系统设置
Electrical Training
Electrical Training
Propared by Liu Jianyong 2011-Oct.
37
参数设定_功能块
Electrical Training
Propared by Liu Jianyong 2011-Oct.
38
参数设定_BICO连接
Electrical Training
Propared by Liu Jianyong 2011-Oct.
西门子通用调试手册
(转载)西门子装置调试大全1 1整流单元调试步骤1.1 出厂参数设定P052=1 选定建立工厂设置功能按下“P”键,运行显示“001”,根据P077 对所有参数进行工厂设置。
结束工厂设置后,显示“008”或“009”。
1.2 标准应用设置P051=2 存取级“标准模式”P053=7 参数设置权限使能“CB+PMU+SST1&OP”P052=5 传动系统设置P071=400 电源电压P052=21 选择电路识别功能在PMU 按下“I”键,进行电路识别,约需10s。
如果出现故障,则必须重新识别。
(r947,r949 显示故障码和故障值)P052=0 选定返回功能。
1.3 其他设置P554.1=P555.1=1010 由PMU 输出分闸指令,在分闸前不等待中间回路电压放电至1.35×P071 的20%。
P603.1=1001 端子17/18 故障输出P555.1=1005 端子13 急停P70 设置MLFB2 26SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
系统辨识方法应用
结构损伤诊断与系统时域辨识研究综述--------------------------------------------------------------------------------作者谢献忠易伟建王修勇陈文新【摘要】对结构时域辨识理论及其应用进行系统研究和综述。
研究表明:环境激励的非平稳与不确定性、响应信息的不完备性、反问题的不适定性以及测试噪声等是影响系统时域辨识理论在结构损伤诊断中应用的关键因素。
以影响因素为主线,系统阐述结构时域辨识理论、方法的发展和研究现状,并对其优、缺点进行比较。
分析指出,基于系统识别的结构损伤诊断技术适合于从整体层次上把握结构的健康状况,只有将其与局部损伤检测方法结合才有可能对大型复杂结构的健康状况作出正确的评估。
展望结构时域辨识技术的发展趋势认为:随机子空间法等先进的系统辨识方法、EMD非平稳信号处理技术以及神经网络智能算法将成为未来研究和发展的主流。
【关键词】结构;损伤诊断;系统辨识;时域;综述0 引言土木工程结构在服役过程中不可避免地遭到环境侵蚀、材料老化和荷载等因素的耦合作用,必然导致结构的损伤累积和抗力衰减,极端情况下引发灾难性的突发事故[1]。
随着经济的发展,我国已到了新建与维修并举的阶段,大量的现役工程结构存在损伤,如何评价其安全状况和评定其剩余使用寿命是当前学术界、工程界亟待解决的问题。
结构健康监测与损伤诊断是近十几年来蓬勃发展的一门新兴科学。
该技术在航空航天、机械等领域已获得广泛的应用,但在土木工程领域,还处于起步阶段。
结构健康监测系统监测结构性能、检测结构损伤、评价和诊断结构健康状况并作出相应的维护决策,是一种可靠、有效、经济的监测方法[2]。
结构健康监测与损伤诊断技术的理论核心是基于振动信号的结构动力学系统识别。
自Liu和Yao[3]于1978年首次将系统识别引入结构工程领域以来,许多研究者开始致力于这方面的工作。
经过近30年的研究,结构动力学系统辨识取得了很大的进展,提出了许多辨识理论与方法。
MM440变频器参数
为了让总线板运行,必须设置:P918 =4 P719=0(命令与频率设定值的选择)P700=6快速选择命令源P1000=6快速选择频率设定P927=15参数修改设置P927更改参数的接口(缺省15,有四位都是1)MM440一、复位为出厂缺省设置值1、P0010=302、P0970=1过程约3分钟二、设置电机参数1、P0003=3用户访问级=3专家级2、P0010=1调试参数过滤器=1快速调试3、P0304=230V电机额定电压(以电机铭牌为准)4、P0305=1.98A电机额定电流(以电机铭牌为准)5、P0307=电机额定功率(以电机铭牌为准)6、P0308=电机额定功率因数(以电机铭牌为准)7、P0310=50HZ电机额定频率(以电机铭牌为准)8、P0311=1380电机额定速度(以电机铭牌为准)三、电机识别P1910=1具体过程:将P1910=1以后,BOP面板的显示器显示A501,表示现在正在做电机辨识计算,还要启动变频器ON信号,然后就等待,辨识过程大约3-5分钟。
当变频器自动OFF1后,就表示识别通过了。
注意:使用MM440一定要建模,要对电机做识别。
也就是说P1910=1必须要做,这是起码的。
否则运行的参数与实际的电机模型不符,工作不会正常的。
交流控制有别于直流控制的特点之一就是需要在控制器里面对受控电机建模。
MM440的建模,就是通过P1910=1/3进行。
不论P1300=什么,P1910=1都必须做!!!四、设置其他参数1、P0010=0调试参数过滤器=0准备2、P0700=5选择数字命令信号源=53、P0705=99数字输入5的功能=994、P0849=第二个OFF3停车命令=5、P1000=5频率设定值的选择=56、P1120=2S斜坡上升时间2S7、P1121=1S斜坡下降时间1S8、P1135=—OFF3的斜坡下降时间—(根据停车效果调整)9、P2010=7USS波特率=7(115200波特)10、P2011=0or1USS地址,两台变频器分别设为0和1一、为出厂缺省设置值1、P0010=302、P0970=1过程约3分钟二、设置电机参数1、P0003=3 访问级=3专家级2、P0010=1 参数过滤器=1快速调试3、P0304=230V 电机额定(以电机铭牌为准)4、P0305=1.98A 电机额定(以电机铭牌为准)5、P0307= 电机额定(以电机铭牌为准)6、P0308= 电机额定功率因数(以电机铭牌为准)7、P0310=50HZ 电机额定频率(以电机铭牌为准)8、P0311=1380 电机额定速度(以电机铭牌为准)三、电机识别P1910=1具体过程:将P1910=1以后,BOP面板的显示A501,表示现在正在做电机辨识计算,还要启动ON信号,然后就等待,辨识过程大约3-5分钟。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时域法(暂态分析 transient),频域法(稳态分析 steady-state)
西门子参数辨识方法:
由西门子参数辨识的电流、电压波形大致可知,其采用的是基于时域(暂态)的辨识方法,即在定子测任意
两相之间施加阶跃电压信号或阶跃电流信号,结合电机在不同激励信号作用下的等效电路模型,通过稳态响应和
暂态响应辨识参数。
西门子通过以下四个步骤辨识出电机参数:
Step1:sR(定子电阻)辨识
在电机AB相之间施加阶跃电压信号,由电流稳态响应计算sR。西门子采用两次发波相减的方法消除死区、
开关管压降等影响。计算公式如下:
12
12
2()sUURII
式中,12,UU——AB相之间的电压值;12,II——阶跃电压信号对应的稳态定子电流。
Step2:L(漏感)辨识:
t
dc
U
dc
U
()ut
s
i
t
1
t
2
t
3
t
max
I
s
L
r
L
m
L
()ut
s
i
r
i
图1电压激励信号和电流响应波形 图2该激励信号下异步电机单相等效电路
在电机AB相之间施加阶跃电压激励,通过电流上升时间计算sL。如图1所示,1t时刻直流侧电压dcU加到
定子测AB两相之间,当定子电流达到限幅值时,将-dcU加到AB两相之间,待电流下降到0时封锁脉冲。该激
励下的异步电机单相等效电路相当于三个电感串并联,等效电感为sL,该电感的计算公式如下:
2dcsUtLI
式中,dcU——直流侧电压;t——电流上升时间;I——t时间内电流变化值。
/2sLL
Step3:rR(转子电阻)辨识
t
dc
U
dc
U
()ut
s
i
t
1
t
2
t
max
I
3
t
4
t
max
I
s
L
r
L
()ut
s
i
s
R
r
R
图3电压激励信号和电流响应波形 图4 该激励下异步电机单相等效电路
如图3所示,在t2~t3(或t4之后)定子电流通过二极管和开关管续流,此时电机的等效电路如图4所示,
电流的衰减时间常数为:
srs
srsr
LLLTRRRR
式中,sR和sL已分别在Step1和Step2中辨识出来,进而可得到转子电阻rR。
Step4:mL(互感)辨识
t
()ut
s
i
0
0
t
s
L
r
L
()ut
s
i
s
R
r
R
m
L
r
i
图5 电流激励信号和电压响应信号 图6 该激励下的异步电机单相等效电路
如图5所示,AB相注入直流电流,在定子电流稳定后突然封锁所有IGBT,定子电流si很快下降到0,励磁
电流通过转子支路续流,并在定子测感应出电压()ut,该电压衰减的时间常数为转子时间常数:
r
r
r
L
TR
式中,rR(转子电阻)已在Step3中辨识出来,可计算出rL,则mL(互感):
1mrLL
仿真波形和西门子波形对比:
1) L(漏感)辨识:
2)rR(转子电阻)辨识:
参考文献:
[1] 马小亮. 矢量控制系统中异步电动机参数的估算和测量[J]. 电气传动.2010
[2] 刘军峰. 定子磁场定向无速度传感器系统的研究与开发[D]. 华中科技大学.2005
[3] 王明渝. 感应电动机矢量控制参数离线辨识技术[J]. 电工技术学报.2006
[4] 小林贵彦. 感应电机离线参数辨识方法[J]. 电力电子.2009
Kerkman, R., Thunes, J.D., Rowan, T.M., and Schlegel, D.W.: ‘A
frequency-based determination of transient inductance and rotor
resistance for field commissioning purposes’, IEEE Trans. Ind.
Appl., 1996, 32, (3), pp. 577–584
(暂态电感:比较了时域和频域的辨识结果,结论是频域更准确)