基于动力学模型的轮式移动机器人运动控制_张洪宇
轮式机器人运动控制算法优化研究

轮式机器人运动控制算法优化研究1、引言轮式机器人在现代工业和军事中具有非常广泛的应用。
然而,其运动控制算法的优化一直是一个研究热点,并且涉及到很多方面的问题。
本文主要探讨轮式机器人运动控制算法的优化研究。
2、轮式机器人的控制系统轮式机器人的控制系统包括运动控制、传感器输入、实时处理和通信等部分。
其中,运动控制是最重要的一部分,即为轮式机器人提供精准的运动控制信号。
轮式机器人的运动控制可以分为速度控制和位置控制两个方面。
3、轮式机器人的速度控制轮式机器人的速度控制包括直线行驶控制和转弯控制两个部分。
直线行驶控制中,需要测量轮子的转速,并将其与前进方向上的期望速度进行比较。
然后,根据差距控制驱动轮子的转速,使其向期望速度靠近。
转弯控制中,则需要控制两侧轮子的转速比例,以实现预定的曲线轨迹。
4、轮式机器人的位置控制轮式机器人的位置控制可以通过PID控制器实现。
该控制器可以根据轮子的位置信息来计算误差,并调整马达的输出控制信号,使其达到期望值。
因此,轮式机器人的位置控制不仅需要定位传感器的准确性,还需要选择合适的PID参数。
5、轮式机器人运动控制算法的优化在实际应用中,轮式机器人的运动控制算法需要考虑到各个方面的问题,例如:控制精度、抗干扰能力、能源消耗等。
因此,轮式机器人运动控制算法的优化是非常必要的。
5.1 控制精度优化轮式机器人的控制精度直接影响到其工作效率和稳定性。
因此,调整PID参数和优化轮子转速控制算法等措施都是提高控制精度的有效方法。
同时,琢磨合适的控制器同步策略可以对算法效率起到显著作用。
5.2 抗干扰能力优化轮式机器人在实际运动过程中,会受到外部环境的各种影响,例如:摩擦力、重力等。
这些影响会给控制器带来噪声,并干扰其正常控制过程。
因此,针对不同的干扰源,我们可以采取一些抗干扰措施,例如:差分控制和非线性控制等。
5.3 能源消耗优化轮式机器人通常需要长时间工作,虽然机器人性能不断优化,但仍会受到电量持久的问题。
基于Matlab的轮式悬架移动平台动力学建模与仿真
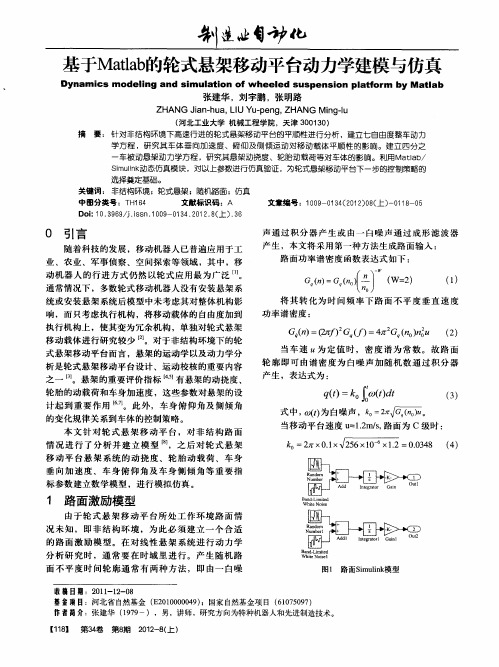
q ) k I ̄)t ( = 0o(d t at
式中,(为白 f 噪声, 。2 qo 。 ) k= ̄ () nU
( 3 )
当移动 平 台速度 u 1 m/ 路面 为 C级 时 : =. s 2 ,
k :2c 01 4 5 × 0 1 o 7X .× 2 6 1 ~X . . 4 ( ) 2=00 8 4 3
0 引言
随 着科技 的发 展 ,移 动机 器人 已普遍 应用于 工 业 、农 业 、军事侦 察 、空间探 索等 领域 ,其 中 ,移 动 机 器人 的行 进 方式 仍 然 以轮 式 应用 最 为广 泛 。 通 常情 况下 ,多数 轮式移 动机 器人 没有安 装悬架 系 统 或安 装悬 架 系统 后模 型 中未 考虑其 对整体 机构 影 响 ,而 只考虑 行机构 上 ,使其变 为冗 余机构 ,单 独对轮 式悬架
声通 过 积 分 器 产 生 或 由 一 白噪 声 通 过 成 形 滤 波 器
产生 ,本文 将采 用第 一种 方法 生成路 面输 入 :
路面 功率谱 密度 函数 表达 式如下 :
/ 、一
Gq
(=qon w2 Gn —l(= ) ()0/ I『 )
( 1 )
将其 转化 为时 间频 率 下 路 面 不 平 度 垂 直 速 度 功 率谱 密度 :
移 动载体 进 行研 究较 少 口。对于 非结构 环境 下 的轮 】 式 悬架移 动平 台而 言 ,悬 架 的运动 学以及动 力学 分 析 是轮式 悬架 移动 平台设 计 、运 动校 核的重 要 内容 之 一 。悬 架的重 要评价 指标 有 悬架 的动挠 度 、 轮 胎 的动 载 荷和车 身加速 度 ,这些参 数对悬 架 的设 计 起 到 重 要 作用 】 此外 ,车 身 俯 仰 角及 侧 倾 角 。 的变化规 律关 系到车 体的控 制策略 。 本 文 针 对轮 式悬 架 移 动 平 台 ,对 非 结 构 路 面 情 况 进 行 了 分 析 并 建 立 模 型 L,之 后 对 轮 式 悬 架 8 】 移 动 平 台悬 架 系统 的动 挠 度 、轮 胎 动 载 荷 、车 身 垂 向加 速 度 、车 身 俯 仰 角 及 车身 侧 倾 角 等 重 要 指
基于模糊PID的轮式移动机器人轨迹控制
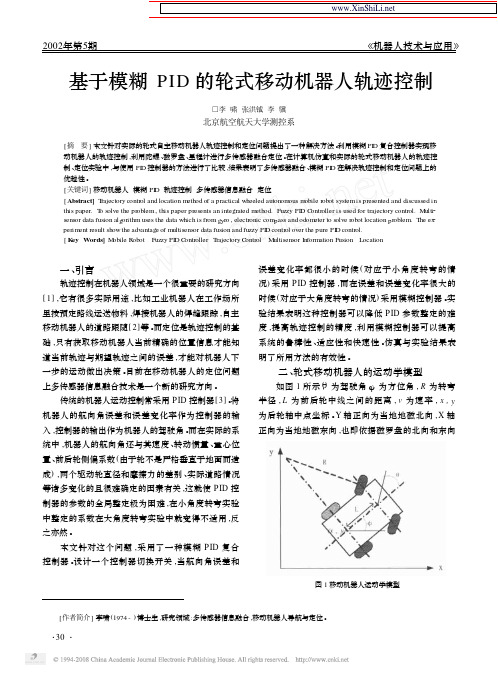
如图 1 所示 θ, 为驾驶角 φ, 为方位角 , R 为转弯 半径 , L 为前后轮中线之间的距离 , v 为速率 , x , y 为后轮轴中点坐标 。Y 轴正向为当地地磁北向 , X 轴 正向为当地地磁东向 ,也即依据磁罗盘的北向和东向
图 1 移动机器人运动学模型
《机器人技术与应用》
机 ,使移动机器人转向。
七 、结果与结论
在仿真结果中由于仅采用了模糊控制器 ,所以由图 7 看到控制的稳态误差较大 ,造成直线段的倾斜 。由图 10 的两组实验结果可以看出 ,模糊 P ID 比单独的 P ID 控制器的控制效果要好 。
图 8. 期望轨迹是矩形时 ,移动机器人重要的研究方向 [ 1] ,它有很多实际用途 ,比如工业机器人在工作场所 里按预定路线运送物料 ,焊接机器人的焊缝跟踪 ,自主 移动机器人的道路跟随[ 2]等 。而定位是轨迹控制的基 础 ,只有获取移动机器人当前精确的位置信息才能知 道当前轨迹与期望轨迹之间的误差 ,才能对机器人下 一步的运动做出决策 。目前在移动机器人的定位问题 上多传感器信息融合技术是一个新的研究方向 。
资料整理自互联网,版权归原作者! 欢迎访问 新势力单片机、嵌入式
2002年第5期
的仿真结果如图 7 所示 。图 8 给出了移动机器人在模 糊 P ID 控制器控制下轨迹跟踪的方位角误差 ,从图 上看 ,跟踪轨迹和期望轨迹之间的误差主要是实际方 位角比期望方位角有滞后 。图 9 是移动机器人跟踪一 条正弦曲线时的结果 。
本文针对这个问题 ,采用了一种模糊 P ID 复合 控制器 。设计一个控制器切换开关 ,当航向角误差和
误差变化率都很小的时候 (对应于小角度转弯的情 况) 采用 P ID 控制器 ,而在误差和误差变化率很大的 时候 (对应于大角度转弯的情况) 采用模糊控制器 。实 验结果表明这种控制器可以降低 P ID 参数整定的难 度 ,提高轨迹控制的精度 ,利用模糊控制器可以提高 系统的鲁棒性 、适应性和快速性 。仿真与实验结果表 明了所用方法的有效性 。
第七章轮式机器人

轮 式第 机七 器章 人
轮式移动机构 轮式机器人的运动学和动力学
轮式机器人的运动规划及控制
第七章 轮式机器人
第一节 非完整系统简介
第
第七章
一
轮式机器人
节
非
完
“非完整”一词起源于近代分析力学,最早出现于德
整
国学者Hertz.H的著作“力学原理”中,1894年
系
Hertz第一次把约束和系统分成完整和非完整两大类,
0
0 1
第
第七章
三
轮式机器人
节
运
动
机器人的运动学模型
学 和
最后就可以得到差动驱动机器人的前向运动学模型:
动
力
学
x cos
I
y
s in
0
sin cos
0
0 0 1
ห้องสมุดไป่ตู้
r
2
rr
r
XR
学
x
I
y
y P
O
x
XI
第
第七章
三
轮式机器人
节
运
动
机器人的坐标系
学
和 动
YI
正交旋转矩阵
力
YR
XR
学
cos sin 0
R sin cos 0
y
P
0
0 1
O
x
XI
第
第七章
三
轮式机器人
节
运
动
机器人的坐标系
学
和
动
局部参考坐标系
YI
力
YR
XR
学
cos sin 0 x
轮式移动机器人自适应主动容错控制研究
DOI :10.15913/ki.kjycx.2024.02.001轮式移动机器人自适应主动容错控制研究*王洪波1,姚嘉凌2(1.江苏安全技术职业学院交通与安全学院,江苏 徐州 221011;2.南京林业大学汽车与交通工程学院,江苏 南京 210037)摘 要:为提高应用于新型冠状病毒感染病区室内空气消毒的轮式移动机器人的可靠性,提出了一种基于自适应神经网络的主动容错控制策略。
在设计好移动机器人的虚拟样机后,推导了其运动学模型,得到了系统输入输出的关系。
设计了一种自适应主动容错控制策略来提高轮式移动机器人轨迹跟踪控制的鲁棒性与可靠性。
在控制框架中,结合神经网络和扩展卡尔曼滤波技术来提高故障诊断器对系统执行器故障检测的准确性;设计了非线性动态逆控制器和自适应故障补偿器来提高系统状态量的响应速度与跟踪精度。
接着,通过Lyapunov 函数证明了所设计控制器的稳定性。
仿真结果表明,与其他2种现有的控制器相比,自适应主动容错控制器能够有效地诊断并补偿系统执行器故障,而且能保证轮式移动机器人在平面内具有较高的跟踪精度。
关键词:轮式移动机器人;容错控制;神经网络;扩展卡尔曼滤波器中图分类号:TP242 文献标志码:A 文章编号:2095-6835(2024)02-0001-06——————————————————————————*[基金项目]国家自然科学基金(编号:51975299);江苏省自然科学基金(编号:BK20181403)消毒是新冠肺炎疫情防控的重要环节,对于阻断病毒间接传播具有重要意义。
当前,室内消毒仍然采用人工作业方式,不仅增加了人力成本,也加重了二次病毒感染的风险。
得益于机器人、控制理论、传感器等技术的发展[1-2],以机器人代替人工完成室内空气消毒任务成为研究的热点,相关技术水平也日益提高。
为此,本文设计了一款能够自主导航的轮式移动机器人来解决室内无人空气消毒问题。
然而,移动机器人是一个复杂的机电系统,长时间频繁工作可能会使执行器发生故障,继而导致系统控制性能的下降。
机器人手臂的动力学建模与运动控制研究
机器人手臂的动力学建模与运动控制研究随着科技的不断进步和发展,机器人技术日益成熟,并在各个领域得到了广泛的应用。
在许多需要高精度操作和自动化生产的场景中,机器人手臂成为关键的装置。
机器人手臂的动力学建模与运动控制是机器人领域中的重要研究方向,本文将从动力学建模和运动控制两个方面进行探讨。
动力学建模是指研究机器人手臂在运动过程中所受到的力和力矩以及位置、速度和加速度之间的关系。
动力学建模的目的是准确描述机器人手臂的运动特性,为后续的运动控制提供基础。
在动力学建模中,通常会涉及到刚体力学、运动学和动力学等相关知识。
对于机器人手臂的动力学建模,一种常见的方法是使用拉格朗日动力学方程。
拉格朗日动力学方程可以通过建立系统的拉格朗日函数和广义力的关系来描述机器人手臂的运动。
通过求解和分析拉格朗日动力学方程,可以得到机器人手臂的位置、速度和加速度等动力学参数。
同时,还可以得到机器人手臂所受到的力和力矩。
除了使用拉格朗日动力学方程外,还有其他一些动力学建模方法,如牛顿-欧拉动力学方程和Kane方法等。
这些方法在不同的应用场景下具有各自的优势。
通过选择合适的动力学建模方法,可以更好地描述机器人手臂的运动特性,为后续的运动控制研究提供可靠的理论基础。
在动力学建模的基础上,进一步研究机器人手臂的运动控制也是至关重要的。
运动控制的目标是通过对机器人手臂的输入信号进行控制,使其达到所期望的位置、速度和加速度等目标。
在运动控制中,通常涉及到控制算法的设计和控制器的实现。
控制算法的设计是运动控制中的关键问题。
常用的控制算法包括比例-积分-微分控制(PID控制)、模型预测控制(MPC)和自适应控制等。
这些算法根据机器人手臂的运动特性和控制要求,通过对输入信号进行优化和调整,实现对机器人手臂的精确控制。
同时,还可以考虑到不同的环境和外界干扰因素,提高机器人手臂的抗干扰能力。
控制器的实现是运动控制中的另一个关键问题。
通常采用的控制器包括PID控制器、模糊控制器和神经网络控制器等。
履带式移动机器人动力学模型及其反馈控制

ISSN 100020054CN 1122223 N 清华大学学报(自然科学版)J T singhua U niv (Sci &Tech ),2006年第46卷第8期2006,V o l .46,N o .89 36137721380履带式移动机器人动力学模型及其反馈控制李 岩, 杨向东, 陈 恳(清华大学精密仪器与机械学系,制造工程研究所,北京100084)收稿日期:2005207213基金项目:燕山石化履带式油罐检测爬壁机器人研制项目作者简介:李岩(19812),男(汉),河北,硕士研究生。
E 2m ail :yan 2li 03@m ails .tsinghua .edu .cn通讯联系人:杨向东,副教授,E 2m ail :yangxd @tsinghua .edu .cn摘 要:履带结构被广泛地应用在移动式机器人的设计当中。
为提高其反馈控制模型的精度,该文详细分析了履带式机器人的受力特点,提出了一种适于进行控制器设计的履带机器人模型,并在此基础上,按照反馈线性化的思想,提出了一种履带式机器人稳定路径跟踪控制器的设计方法,同时给出了方法的非奇异条件。
该文提出的控制系统模型和路径跟踪方法,为履带式机器人控制系统设计提供了理论依据。
关键词:履带式机器人;滑动操纵模型;反馈线性化中图分类号:T P 24文献标识码:B文章编号:100020054(2006)0821377204D ynam ics m odel and feedback con trol oftracked robotsL I ya n ,Y ANG Xia ngdong ,CHEN He n(I n stitute of manufactur i ng Eng i neer i ng ,D epart men t of Prec ision I n stru men ts and M echanology ,Tsi nghua Un iversity ,Be ij i ng 100084,Chi na )Abstract :T he pedrail has been w idely app lied to the design of the mobile robo t .To i m p rove the accuracy of its feedback contro lmodel,th is article detailedly analyzes the fo rce characteristics of the tracked robo t,and p ropo ses a k ind of tracked robo t model that is suitable fo r the design of the contro ller .O n the basis of this model,a m ethod of designing a steady path tracing contro ller fo r tracked robo t is p ropo sed acco rding to the idea of feedback linearizati on,and m eanw hile the conditi ons to avo id singularities is indicated also.T he contro l model and the path tracing m ethod p ropo sed p rovide the theo ry basis fo r the design of the tracked robo t contro l system.Key words :tracked 2robo t;ski p 2steeringmodel;feedbacklinearizati on履带结构以其优良的移动性能,被广泛应用在机器人设计当中[12]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
兵工自动化 自动测量与控制 O. I. Automation 2008年第27卷第11期 Automatic Measurement and Control 2008, Vol. 27, No. 11
·79·文章编号:1006-1576(2008)11-0079-04 基于动力学模型的轮式移动机器人运动控制
张洪宇,张鹏程,刘春明,宋金泽 (国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
摘要:目前,对不确定非完整动力学系统进行设计的主要方法有自适应控制、预测控制、最优控制、智能控制等。结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器的设计和研究进展进行综述,并分析今后的重点研究方向。 关键词:轮式移动机器人;动力学模型;运动控制;非完整系统 中图分类号:TP242.6; TP273 文献标识码:A
Move Control of Wheeled Mobile Robot Based on Dynamic Model
ZHANG Hong-yu, ZHANG Peng-cheng, LIU Chun-ming, SONG Jin-ze (College of Electromechanical Engineering & Automation, National University of Defense Technology, Changsha 410073, China)
Abstract: At present, methods of non-integrity dynamic systems design mainly include adaptive control, predictive control, optimal control, intelligence control and so on. Based on analyzing the recent results in modeling of WMR dynamics, a survey on motion control of WMR based on dynamic models was given. In addition, future research directions on related topics were also discussed. Keywords: Wheeled mobile robot; Dynamic model; Motion control; Non-integrity system
0 引言
随着生产的发展和科学技术的进步,移动机器人系统在工业、建筑、交通等实际领域具有越来越广泛的应用和需求。进入21世纪,随着移动机器人应用需求的扩大,其应用领域已从结构化的室内环境扩展到海洋、空间和极地、火山等环境。较之固定式机械手,移动机器人具有更广阔的运动空间,更强的灵活性。移动机器人的研究必须解决一系列问题,包括环境感知与建模、实时定位、路径规划、运动控制等,而其中运动控制又是移动机器人系统研究中的关键问题。故结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器设计理论和方法的研究进展进行研究。
1 WMR动力学建模 有关WMR早期的研究文献通常针对WMR的运动学模型。但对于高性能的WMR运动控制器设计,仅考虑运动学模型是不够的。文献[1]提出了带有动力小脚轮冗余驱动的移动机器人动力学建模方法,以及WMR接触稳定性问题和稳定接触条件。文献[2]提出一种新的WMR运动学建模的方法,这种方法是基于不平的地面,从每个轮子的雅可比矩阵中推出一个简洁的方程,在这新的方程中给出了车结构参数的物理概念,这样更容易写出从车到接
触点的转换方程。文献[3]介绍了与机器人动作相关的每个轮子的雅可比矩阵,与旋转运动的等式合并得出每个轮子的运动方程。文献[4]基于LuGre干摩擦模型和轮胎动力学提出一种三维动力学轮胎/道路摩擦模型,不但考虑了轮胎的径向运动,同时也考虑了扰动和阻尼摩擦下动力学模型,模型不但可以应用在轮胎/道路情况下,也可应用在对车体控制中。在样例中校准模型参数和证实了模型,并用于广泛应用的“magic formula”中,这样更容易估计摩擦力。在文献[5]中同时考虑运动学和动力学约束,其中提出新的计算轮胎横向力方法,并证实了这种轮胎估计的方法比线性化的轮胎模型好,用非线性模型来模拟汽车和受力计算,建立差动驱动移动机器人模型,模型本身可以当作运动控制器。
2 WMR运动控制器设计的主要发展趋势 在WMR控制器设计中,文献[6]给出了全面的分析,WMR的反馈控制根据控制目标的不同,可以大致分为3类:轨迹跟踪(Trajectory tracking)、路径跟随(Path following)、点镇定(Point stabilization)。轨迹跟踪问题指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随给定的参考轨迹。路径跟随问题是指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随指定的几何
收稿日期:2008-05-19;修回日期:2008-07-16 作者简介:张洪宇(1978-) 男,国防科学技术大学在读硕士生,从事模式识别与智能系统研究。 ,兵工自动化 自动测量与控制 O. I. Automation 2008年第27卷第11期 Automatic Measurement and Control 2008, Vol. 27, No. 11
·80·路径。两者的区别:前者的参考轨迹依赖于时间变量,而后者的路径独立于时间变量。点镇定是指系统从给定的初始状态到达并稳定在指定的目标状态,一般将系统的平衡点作为目标点。对WMR而言,点镇定又可称为姿态镇定(Posture stabilization)或姿态调节(Posture regulation)。 在WMR运动控制的理论研究中,一般假设WMR的非完整约束是一种理想约束[7],即轮子与地
面为点接触,并且接触点处只有纯滚动而不发生相对滑动(包括侧向滑动和纵向滑动)。根据Brockett条件[8]可知:非完整系统用时不变光滑反馈不能在
平衡点渐进稳定,不存在将系统镇定到非奇异位形的光滑时不变静态状态反馈控制律。实际上,连续的时不变静态状态反馈控制律也不存在[9]。Pomet
推广了Brockett的结论,指出连续(光滑)时不变动态状态反馈律同样不存在[10]。这就给出了镇定控
制的本质的约束:不存在使得非完整系统镇定的连续时不变状态反馈律。这样,非完整系统镇定控制律的可能形式受到了本质的约束,经典线性系统理论中许多成熟结果无法直接应用于非完整系统的镇定控制;而非完整WMR还是本质非线性的欠驱动无漂移动力学系统,所以其控制更加困难。 在现实WMR控制中,非完整系统有很强的应用背景,具有高度非线性和强耦合特征,是复杂的多输入多输出系统。由于测量和建模不精确,加上负载的变化和外界干扰,很难获得精确的系统模型。因此,基于精确模型的反馈控制律在实际中存在局限性,研究不确定非完整系统更具实际意义。 近年来有关不确定非完整系统镇定和跟踪问题的文献很多,主要是因为对不确定性或干扰采用了不同的模型,以及使用了不同的处理方法以实现鲁棒性或适应性目标。目前,对不确定非完整动力学系统进行设计的主要方法有自适应控制、预测控
制、最优控制、智能控制等。 (1) 自适应控制 大多数WMR自适应控制器设计都假设系统中的不确定性可用常系数进行参数线性化。文献[11]全面介绍了自适应控制方法在WMR运动控制中的应用,对其中自适应能力和对不确定WMR建模方法进行了分析,并对比说明了控制效果。 传统的自适应控制器设计往往基于一个参数或慢时变的系统模型,针对传统的自适应控制器设计的这个缺点,可应用模糊推理机制扩展对环境扰动
(如:在文献[12]中提到的可变摩擦)的补偿。针对非二次系统的控制器设计,文献[13]的跟踪控制中应用线性化输入输出模型的方法来得到1个最小二次方,这样提高了自适应能力。在文献[14]的轨迹跟踪问题中把状态反馈控制器与自适应控制器结合来估计未知的方向误差,其中考虑了动态模型,用输入输出线性化的方法来动态跟踪参考轨迹。应用自适应控制在解决轨迹跟踪和姿态镇定的问题时,经常把镇定问题常转化为等价的跟踪问题[15]。
(2) 预测控制方法 预测控制技术是非重要的领域,在移动机器人预测方法领域因为参考轨迹可以提前知道,路经跟踪是非常有希望实现的。多数的以模型为基础的预测控制器用线性化的WMR运动学模型来预测未来系统的输出。在文献[16]中选择了通用的预测控制来实现移动机器人的控制,其中用二次损失函数来惩罚跟踪误差,来实现控制代价最小化。使用Smith预测器的通用预测控制器来估计系统时延的方法在文献[17]应用。在文献[18]中基于线性时变描述的系统时用了模型预测控制,控制规律还是通过最优化的损失函数来得到。对于轨迹跟踪问题的非线性预测控制在文献[19]中提到,其中使用一个多层神经网络来对非线性运动学的移动机器人建模,向先前研究的一样,控制向量的最优解也是通过最小化的损失函数来获得。文献[20]把模型预测控制用在WMR轨迹跟踪控制,线性化的跟踪误差预测未来系统行为,用二次损失函数惩罚系统跟踪误差和控制效果来得出控制律。提出的控制器包括对速度和加速度的约束来防止WMR侧滑,用Smith预测器来补偿视觉死区。在真实WMR试验中,把提出的控制器与时变状态反馈控制器进行了比较。 (3) 最优控制 文献[13,20,21]等在WMR控制中都应用了最优控制理论,针对四轮驱动的WMR动力学模型,采用Pacejka轮胎模型,在文献[22]的多输入系统中,通过设计控制器完成状态反馈和控制分配,用线性二次规划来设计控制器得到状态空间模型,求得二次型性能指标的最优控制器。通过正反两方面对控制器参数的调整来分析控制器性能,试验结果证实在和目标冲突时控制策略成功地最小化了反对命令,在转弯失败的情况下也能保持较好的轨迹。 (4) 智能控制方法 以神经网络、模糊控制、进化算法、增强学习