试验靶标对抗主动声自导鱼雷效能仿真报告
实战背景下的鱼雷声自导系统
个气泡 的 目标强 度和 消声截 面均达 最大 。当多个气 泡形 成 气幕 时 , 的消声截面和 目标强度分别 为各 个气泡 的消声截 总 面和 目标强度之和。在实际中 , 声波频 率和气泡共 振频率是 复杂多变的 , 因此这 里对 它们不 做过 多讨论 , 着重 考虑整 而 体气幕效应 。经粗略估 算 , 一般 气幕 的面积 约 40 m 0 时才 能达到真实 目标 的反射强度 , 而对主动声纳有 一定 的诱 骗 从 作用 。理论和实践表 明 , 气幕 距 目标 ( 或鱼 雷 ) 近 , 越 其有 效 宽度越 大 , 对噪声 的屏蔽效果也就越好 。 因此 , 爆炸形成 的气幕对鱼雷声 自导的噪声接 收产生一 定 的干扰 , 并可导致声 自导系统做 出错 误判断 。其影 响程度
( 任编辑 责 杨继森)
接收 到的 目标 信号强度降低 。
在频 率为/的声波 激励 下 , 半径 为 。的单 个气 泡 ( 振 共 频率 为 ) 的消声 截面为
4竹口 o
系统对声源方位的判断 。同时 , 爆炸 产生 的大量气 幕对 鱼雷
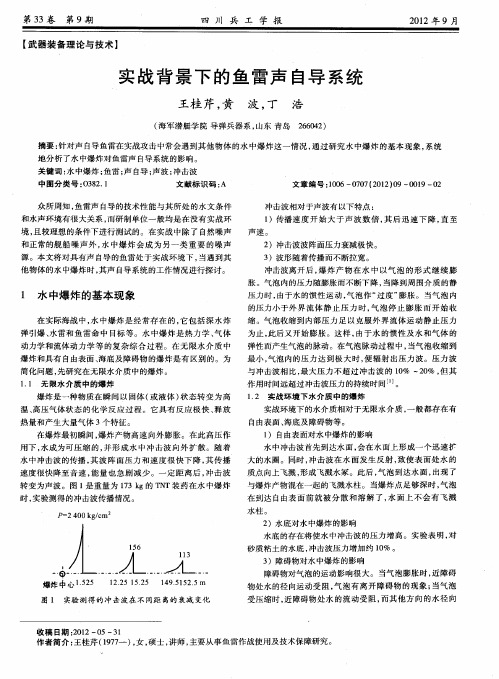
爆炸 冲击波和压 力波 产生 的压力 随水 中波 的传 播 向 四
周扩散 , 这会 引起 爆 炸点 周 围水 域 的静 压力 呈 现脉 冲式 起 伏, 且这 种压 力起伏 逐渐 减弱 。故 当声波 通过 该 区域时 , 声 线会发生弯 曲 , 其弯 曲程度与静压力分 布情况有 关。若鱼雷
源 。本 文 将 对 具 有 声 自导 的鱼 雷 处 于 实 战环 境 下 , 遇 到其 当
2 )冲击波波阵面压力衰减极快 。
3 )波形随着传播而不断拉宽 。 冲击波离 开后 , 炸产 物在 水 中以气 泡 的形 式继 续 膨 爆 胀。气泡 内的压力随膨胀而不断下 降, 当降到周 围介质 的静 压力时 , 由于水 的惯 性运 动 , 泡作 “ 气 过度 ” 膨胀 。当气泡 内
水下爆炸对抗鱼雷声纳效能分析

水下爆炸对抗鱼雷声纳效能分析裴善报;刘荣忠;郭锐【摘要】水声对抗中由于战术使用及作战态势的复杂性,使得水下连续爆炸对抗鱼雷声纳的效果难以评估.本文分析了水下连续爆炸对抗鱼雷声纳的原理及其对抗主动、被动声纳的模型,针对有无水下爆炸干扰的2种情况,建立了主动声纳探测模型,并且根据模型求解了在不同频率、不同装药量下主动声纳的探测距离,然后以探测距离平均缩减量及平均缩减率为准则,运用仿真判断对抗效果,分析了有无水下爆炸声干扰时主动声纳探测距离随频率、装药量的变化规律.【期刊名称】《鱼雷技术》【年(卷),期】2014(022)005【总页数】4页(P366-369)【关键词】鱼雷;水声对抗;水下连续爆炸;主动声纳【作者】裴善报;刘荣忠;郭锐【作者单位】南京理工大学机械工程学院,江苏南京,210094;安徽工业大学机械工程学院,安徽马鞍山,243000;南京理工大学机械工程学院,江苏南京,210094;南京理工大学机械工程学院,江苏南京,210094【正文语种】中文【中图分类】TJ630.1;TP391.9水下连续爆炸产生的连续脉冲波是功率高、频带宽的声源, 可作为水声干扰源, 实现对声自导鱼雷的干扰。
水声对抗鱼雷声纳, 实质为利用水声的宽频带高功率特性实现对鱼雷声纳干扰。
声干扰主动声纳就是要提高声纳接收噪声的水平, 降低其信噪比。
对于声干扰被动声纳而言, 在远距离时, 声干扰可成为强信号的假目标; 在近距离时, 则造成声纳接收机阻塞、饱和, 掩盖舰船噪声信号的接收, 实现水声对抗[1-3]。
但由于战术使用及作战态势复杂, 水下连续爆炸对抗鱼雷声纳的干扰效果如何, 是作战使用人员较为关心的问题。
本文以探测距离平均缩减量及探测距离平均缩减率为准则, 运用仿真判断水下连续爆炸对抗鱼雷声纳的干扰效果, 为水面舰船使用水下连续爆炸对抗鱼雷提供参考。
被动声纳方程式中: SL是目标辐射声源级; NL是声纳背景噪声级; TL是传播损失; DT是检测阈; DI是接收指向系数。
基于ADC模型的某型鱼雷自导系统作战效能分析
关 键 词 : 雷 ;自导 系 统 ;A 鱼 DC模 型 ; 能 分 析 效
中 图 分 类 号 :TJ 3 . 60 2 文 献 标 识 码 :A
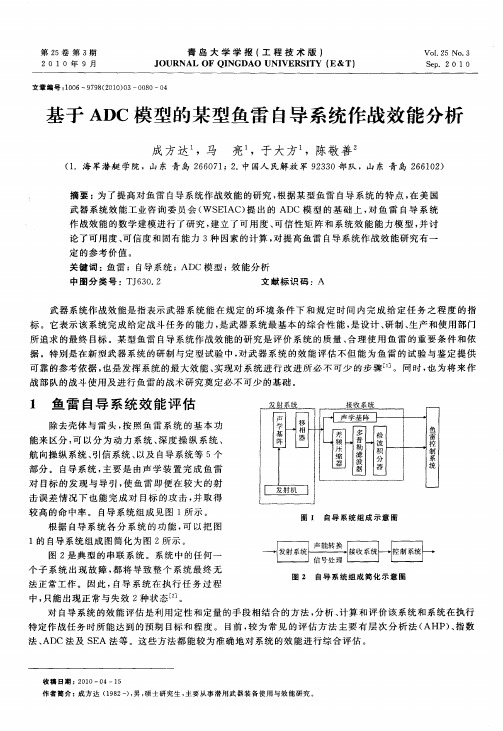
武器系 统作战效 能是指 表示武器 系 统能 在规 定 的环境 条 件下 和 规 定 时间 内 完成 给定 任 务 之程 度 的指 标 。它表示该 系统完 成给定 战斗任务 的能力 , 武器 系统最基本 的综合 性能 , 是 是设计 、 研制 、 产和使用 部 门 生 所追求 的最终 目标 。某 型鱼雷 自导系统 作战效 能的研究 是评 价 系统 的质量 、 合理 使 用鱼 雷 的重 要条 件 和依 据 。特别 是在新 型武器 系统 的研 制与定 型试 验 中 , 对武器 系统 的效 能评 估不 但能 为 鱼雷 的试 验 与鉴 定提 供 可靠 的参考 依据 , 也是发挥 系统 的最 大效 能 、 实现对 系统 进行 改进 所 必不 可少 的步骤口 。同时 , 为 将来作 ] 也 战部 队的战斗使用 及进行 鱼雷 的战术研究奠 定必不 可少 的基 础 。
D, 分 别 为 C
d1 1 1 2
2
图 3 自导 系统 效 能 构 成 图
dl
2
第 3期
成 方达 , : 于 AD 等 基 C模 型 的某 型鱼雷 自导 系统作 战效 能分析
8 1
2 基 于 ADC方 法 的 鱼 雷 自导 系 统 效 能 评 估
2 1 ADC 方 法 .
自导 系统
l
J
l
A DC方 法 是 基 于 美 国 工 业 界 武 器 系 统 效 能 咨 询 委 员 会 ( S I W E—
对 目标 的发 现与 导引 , 鱼雷 即便 在较 大 的射 使
声自导鱼雷固定提前角导引法追踪效果研究
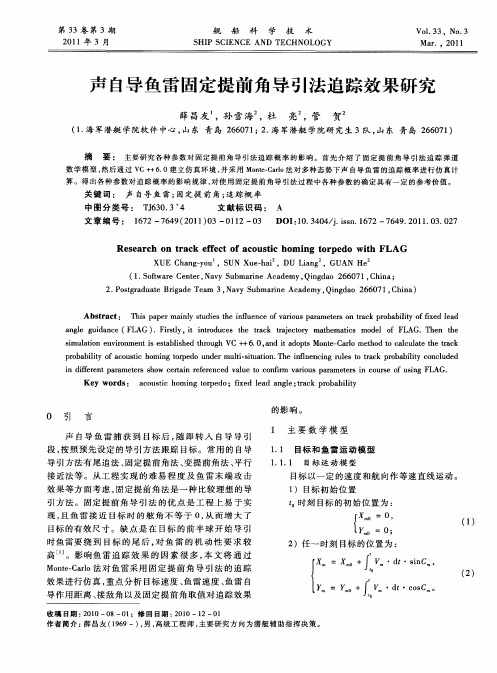
接 近法等 。从工 程 实现 的难 易 程 度及 鱼 雷 末 端 攻击 效果 等方 面考虑 , 固定 提前 角法 是一 种 比较理 想 的导
引方 法 。固定提 前 角导 引 法 的 优 点是 工 程 上 易 于实 现 , 鱼 雷 接 近 目标 时 的舷 角 不等 于 0 从 而增 大 了 且 , 目标 的有效 尺寸 。缺 点 是 在 目标 的前 半 球 开始 导 引
( . o w r C ne , ayS b aieA a e y Q nd o 2 6 7 , hn ; 1 Sf ae etrN v u m r cd m , iga 6 0 C ia t n 1 2 P s rd a r a eT a , ayS b r eA a e y Qn d o2 6 7 , hn ) . ot au t B i d em 3 N v u ma n c dm , ig a 6 0 C ia g e g i 1
1 3 鱼 雷 命 中 目标 条 件 .
判 断鱼 雷是 否命 中 目标 的 主要 依 据 是 鱼 雷 与 目 标 之 间 的距 离 r 若满 足 r≤ 3 m 则 认 为 鱼 雷命 中 目 。 0 标 。其 中
r =
1 目标 速 度 和 接 敌 角 对 追 踪 概 率 的 影 响 )
导作用距 离 、 接敌 角 以及 固定 提前 角取 值对追 踪 效果
收稿 日期 : 0 0—0 0 ;修 回 日期 : 0 0—1 0 21 8— 1 21 2— 1 作 者 简 介 : 昌友 (9 9一) 男 , 级 工 程 师 , 薛 16 , 高 主要 研 究 方 向 为潜 艇 辅 助指 挥 决 策 。
基于HLA的鱼雷自导水声对抗仿真系统

基于HLA的鱼雷自导水声对抗仿真系统成建波;陈航【期刊名称】《航空计算技术》【年(卷),期】2014(000)003【摘要】针对鱼雷声自导系统,利用高层体系结构技术,设计开发了基于阵元信号级仿真的水声对抗仿真系统。
给出了水声对抗仿真系统的5大联邦成员组成,并介绍了相应的仿真功能。
在此基础上,给出了仿真系统开发的关键技术,包括数据交互的优化、FOM/SOM的设计以及多线程技术。
最后以对抗某型鱼雷为例进行了仿真实验,验证了仿真系统的可行性和有效性。
%An underwater acoustic warfare simulation system based on acoustic signal being simulated was designed and developed for torpedo acoustic homing system .In this paper,the developed simulation sys-tem were composed by five federates ,and the function of each federate was given.The key techniques of system implementation were introduced ,such as data interactivity optimization ,the design of FOM/SOM, and multi -thread techniques.Finally,taking some torpedo warfare as an example ,simulation experiment was carried out to approve the feasibility and effectiveness of the system .【总页数】4页(P121-124)【作者】成建波;陈航【作者单位】西北工业大学航海学院,陕西西安710072;西北工业大学航海学院,陕西西安710072【正文语种】中文【中图分类】TP391.9【相关文献】1.基于以太网的鱼雷声自导电信号半实物仿真系统 [J], 王刚;黄飞;乔纯捷;王跃科2.基于DSP的鱼雷声自导实时仿真系统 [J], 杨占龙;陈航;王新宏;马艳;戚茜;杨虎3.基于HLA的一体化水声对抗仿真系统研究 [J], 曹海旺;黄建国;王新晓4.基于HLA的水声对抗仿真系统结构设计 [J], 陈涛;罗修波5.基于HLA的鱼雷声自导系统仿真平台开发研究 [J], 杨虎;陈航因版权原因,仅展示原文概要,查看原文内容请购买。
鱼雷自导系统测试性验证平台设计与实现

P G A到 7通道 , 其有效值 再放 大 2倍 , 8 通 道值 和 7通 道 基本 相等 。经过数据 分析 可判断 驱动模 块无 故 障。
行故障检测与隔离, 按其结果来估计产品的测试性水平 ,
并 判断是 否 达到 了规 定 要 求 。针对 测 试性 验 证 的需 求 , 同时结合 鱼 雷 自导 系统这 一 具 体 对象 , 本 文设 计 了一种 鱼 雷 自导 系统测 试性验 证平 台 , 基 于故 障注人技 术 , 对其
进 行 了测试 性验证 , 取得 了很好 的效 果 。
声 R导 数 字 机
r 一 ’} 卜 滤波
一
放大 —Βιβλιοθήκη Hl 8 , 9 . 1 0
号 源 罔
控 制 计 算 机
图 4 数 字 机 实 物 图
声 对 接 阵
⑩ 圈 @ 匝
札
图 3 系统 硬 件 框 图
各故 障 内涵 和通道 内涵如表 1 和表 2所示 。 系统 中控 制计 算 机 、 声 自导数 字 机 、 驱动模块、 目标 模 拟器 、 故 障 注人模 块 和 电源模块 为数 字机 部分 , 实 物 图 如 图 4所示 。声 对接 阵实 物 图如 图 5所示 。
测试性 是 指能及 时准确 地确 定产 品的状态 ( 可工作 、
( 6 ) 电源模 块 : 为 系统 供 电并 定 时 上 传 电压 、 电 流数 据 以监控 系统是 否正 常供 电。 系统工作 流程 如图 1 所示 , 控 制计 算机 接收 到 P C的 启动 自导命 令后 向声 自导数 字 机发 出启 动 自导指 令 , 开 启 自导流程 : 声 自导 数字机 产生 自导信号 , 同时开始 采集 数据 ; 自导信 号驱动 放 大后 通过 声 对 接 阵 中一 对 换 能 器 接 收并 触发 目标 模 拟器 , 目标 模 拟 器 发 出 目标 回波 信 号
鱼雷主动声引信仿真试验技术探讨
鱼雷主动声引信仿真试验技术探讨
熊乾坤;屈武
【期刊名称】《舰船电子工程》
【年(卷),期】2011(031)006
【摘要】首先介绍了鱼雷主动声引信的工作原理和仿真试验方法;然后给出了仿真试验系统组成、工作原理、系统各部分的硬件设计以及仿真试验流程;构建了一个软硬件结合的仿真试验系统.
【总页数】4页(P115-117,152)
【作者】熊乾坤;屈武
【作者单位】91388部队91分队,湛江524022;91388部队91分队,湛江524022【正文语种】中文
【中图分类】TJ431.7
【相关文献】
1.基于相位编码信号的鱼雷主动反舰声引信研究 [J], 陈喜;蒋涛;孙波
2.鱼雷浅水主动声引信的一种布阵方法 [J], 崔户山;王明洲;白志科;张文波
3.基于短时傅立叶变化反鱼雷鱼雷主动声引信浅水检测方法 [J], 崔户山;崔贵平;王明洲;崔鑫山
4.主动声自导方式下鱼雷航行自噪声测量技术探讨 [J], 易红;陈春玉
5.一种基于快速傅里叶变换反鱼雷鱼雷主动声引信回波检测方法 [J], 李耀波;孙常存;任志良;王拓
因版权原因,仅展示原文概要,查看原文内容请购买。
鱼雷声靶声特性参数标校技术研究
图 2 声靶 发 射 声源 级 测 量
后 ,激励一 水平无 指 向性 的发射 换 能器工 作 。 A、B
两 点处于 同一 水平面 中 ,分 别位 于远场 d和 处 。 为了在 A 点产生 声强 级为 的声压 ,则 B 点处 的
发射 声源 级 的测 量框 图如 图 2所 示 ,鱼 雷声 靶发 射脉 冲声信 号 , 由位 于 自由场远 场 中的水听 器进 行接 收 ,水听 器输 出的 开路 电压 经放大 、滤 波 后输入 波形采 集 器进行 测量 。由式 ( ) 4 可求得 声靶 的发 射声源 级 ( B,基准值 :lP . : d ga m)
≥
2 2接 收特 性测 量方 法 .
( 2 )
接 收特性测量 时, 声靶换能器放置在 图 1中的 将
A 点处 。 先通过 匕 的方法在 A 点产生一个 己知入射 面
声压级为 的声信号, 测得声靶接收通道的输出电压
( f ) ,即可得到声靶的接收灵敏度为:
MRf=2 1 ( 一 ( ) 0g f )
一
ll、 M2 d2d ‘ g l 一1 +1 l) o + 0 o0 )1 L g g
式 中, 为标准 水听 器 的开路 电压灵敏 度级 ,B( d 基 准 值 : 1 /P ) d V1a . t o为发射 换 能器 与水听器 的声 中 心 间距离 ,m ;d 为 发射换 能器 声 中心到 A 点的 距 离 ,m。 因此 ,只 需测得 标准水 听器 开路输 出端 与功率 放 大 器输入 端之 间的传 递 函数模值 ,即可迅速 求 得 在 A 点产生 厶 声 强级 时所 需输入到 功率放大器 的 电压值 :
() 3
同样 ,可测得 声靶 接收通 道 的直 流输 出 电压 、 声 压和 频率 的测量 偏差 。 23发射 声源级 测量 和标 校方 法 .
线阵声诱饵对抗智能鱼雷尺度识别效果分析
( Na v a l A c a d e my o f A r ma me n t , B e i j i n g 1 0 0 1 6 1 , C h i n a )
Ab s t r a c t : Ac c o r d i n g t o t a r g e t d i me n s i o n r e c o g n i t i o n me t h o d u s e d b y t h e s ma r t t o r p e d o , we e s t a b l i s h a l i n e a r a r r a y d e -
关键 词 :线阵声诱饵 ; 尺度 识别 ;方位走 向 ;视在张角
中 图 分 类号 :T B 5 5 文 献 标 识 码 :A d o i :1 0 . 3 4 0 4  ̄ . i s s n . 1 6 7 2—7 6 1 9 . 2 0 1 7 . 0 5 . 0 2 7
文章编 号 : 1 6 7 2—7 6 1 9 ( 2 0 1 7 ) 0 5 —0 1 3 5 —0 4
第3 9 卷 第5 期
2 0 1 7年 5月
舰
船
科
学
技
术
Vo 1 . 3 9 , No . 5 Ma y, 2 01 7
S HI P S CI E N CE AN D TECHN0LOGY
线 阵声诱 饵对 抗智 能 鱼雷 尺度 识别效 果分析
徐 海珠 ,袁延 艺 ,刘雄 厚 ,余 贽
0 引 言
近 年 来 , 随 着 鱼 雷 技 术 的 发 展 ,声 自导 鱼 雷 普 遍 具 备 一 定 的智 能 性 ,其 显 著 特 点 是 有 较 强 的 目标 识 别 能力[ 1 - 2 ] 。水 声 目标 识 别 主 要 采 用 目标 辐 射 噪声 特 征 识 别 和 回 波 特 征识 别 方 法 , 由 于舰 船 辐 射 噪 声 特 征 主 要
主动声自导鱼雷搜索模型应用研究
主动声自导鱼雷搜索模型应用研究胡轶【期刊名称】《系统仿真技术》【年(卷),期】2011(007)003【摘要】This paper presents active-guided torpedo researching model. Accouding to the target-parsing principle and self-guided torpedo self-control terminal distributing rules, combine torpedo movement model and self-guided model to simulate the process of researching and catching a target. The model gives a exact catching probability.%在主动声自导鱼雷解命中原理的基础上,利用主动声自导鱼雷自控终点的散布特点,将主动声自导鱼雷的运动和主动自导在方位上的搜索结合起来,建立了主动寻的自导开机后任意时刻的搜索波门模型,从而达到了逼真模拟主动寻的自导捕捉目标过程和准确求取目标捕捉概率的目的.最后利用本模型对不同参数的主动声自导鱼雷(主动自导)的目标捕捉概率进行了仿真,得到了有价值的结论.【总页数】4页(P233-236)【作者】胡轶【作者单位】海军潜艇学院,山东青岛266071【正文语种】中文【中图分类】E843【相关文献】1.双速制声自导鱼雷射击提前角及主动声自导开机时机研究 [J], 胡宏灿;周明;寇祝;林宗祥2.声自导鱼雷自导开机距离计算模型研究 [J], 周涛3.考虑自导作用距离随舷角变化时主动声自导鱼雷射击的最优提前角 [J], 张静远;朱文钰4.声自导鱼雷搜索航路威胁区域分析 [J], 赵向涛;寇祝;王佳婧;石志军5.声自导鱼雷搜索航路威胁区域分析 [J], 赵向涛;寇祝;王佳婧;石志军因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
试验靶标对抗主动声自导鱼雷效能仿真报告
本文主要针对试验靶标对抗主动声自导鱼雷效能进行仿真分析和评估。
本文首先介绍了实验的背景和目的,然后详细阐述了仿真模型的构建和参数设定,并且给出了仿真结果的数据分析和总结结论。
最后,提出了几点对改进后续研究的建议。
一、实验的背景和目的
主动声自导鱼雷是目前常见的反潜武器之一,具备高效、准确、迅速等优势,已经得到各国军队的广泛采用。
然而,鱼雷局限于水下运动,面对快速变动、极易识别靶标时很难准确打击目标的问题。
因此,本次实验的目的是通过仿真分析建立试验靶标对抗主动声自导鱼雷效能的模型,探索如何有效提高主动声自导鱼雷的打击精度和效率。
二、仿真模型的构建和参数设定
该实验采用MATLAB软件进行仿真模拟,包括三个主要模块: 靶标模块、鱼雷模块、及目标模块。
下面分别介绍各模块的参数设定和操作流程。
1、靶标模块
试验靶标是一种航行平稳的目标,能够模拟潜艇或舰艇的尺寸和运动,主要参数包括速度、方向、位置和深度等。
为了更好的模拟实际情况,我们将靶标设置为随机变动运动,这样能更真实、全面的反映出主动声自导鱼雷在不同情况下的对抗效果。
2、鱼雷模块
主动声自导鱼雷模块包含了鱼雷本身和航向、深度等相关设备的模拟。
该模块设定了初始速度和方向,然后鱼雷会通过声纳系统检测到靶标的位置,并依据算法调整航向和深度来对靶标进行攻击。
因此,鱼雷的控制算法是影响鱼雷攻击效果的重要因素。
具体包括传感器参数、控制系统设计以及导引规律等。
3、目标模块
目标模块是鱼雷模块和靶标模块之间的传输调度中心,主要控制鱼雷和靶标之间信息的传递和处理。
将靶标和鱼雷的监视器与控制器相连接是目标模块的核心步骤,通过这一步骤能够实现靶标信息和攻击策略的传递和分析,从而进一步分析对策和措施。
三、仿真结果的数据分析和总结结论
我们通过对试验靶标对抗主动声自导鱼雷效能的仿真模拟得出如下结论:
1、鱼雷制导精度影响鱼雷攻击的效率。
在不断的仿真实验中,我们发现鱼雷制导精度越高,则鱼雷打击目标的效率也越高。
2、鱼雷深度的设定影响鱼雷攻击的效果。
我们通过多次仿真
实验,发现在靶标深度恒定的情况下,鱼雷的攻击深度也会对攻击效果产生影响,同时也会影响到鱼雷的速度和航向。
3、靶标运动的状态和鱼雷导引规律对鱼雷攻击效果造成很大
的影响。
靶标的运动对鱼雷的攻击效果产生较大的干扰,因此在仿真实验中靶标运动状态的设置至关重要。
同时,鱼雷导引规律的设定也是影响攻击效果的关键因素之一。
四、改进后续研究的建议
为了更好的研究试验靶标对抗主动声自导鱼雷效能,有以下几个改进建议:
1、根据实际环境设定更多的参数。
考虑到实际环境往往更加
复杂和多变,需要进一步增加模型中的参数设置,从而更好的模拟实际情况,提高模型的可靠性和精度。
2、进一步完善导引算法并开发更加智能高效的鱼雷控制系统。
提高鱼雷的控制能力,能够更好的对不同情况下的靶标进行攻击,从而提高攻击效率,进一步提高主动声自导鱼雷的实用价值。
3、扩大实验范围,增加样本数量。
当前实验的样本数量较少,需要进一步扩大实验范围,增加样本数量,以更好地验证分析结论的准确性和可靠性。
以上是本次试验靶标对抗主动声自导鱼雷效能的仿真报告,在生产和实际使用过程中都有一定的指导作用。
期望本次试验能为提高主动声自导鱼雷的打击精度和效率提供有力的支持。
在试验靶标对抗主动声自导鱼雷效能的仿真中,我们得出了如下
数据:
1、不同鱼雷控制算法和靶标运动状态下的击中率和漏报率。
2、不同鱼雷制导精度和靶标深度设定下的击中率和漏报率。
3、不同靶标速度和方向与不同鱼雷攻击角度下的击中率和漏
报率。
4、不同声纳频率和靶标距离下的鱼雷探测能力。
通过对这些数据的分析,我们得出如下结论:
1、击中率和漏报率
试验中,我们发现根据鱼雷控制算法的不同,对击中率和漏报率有着较大的影响。
具体地,当鱼雷控制算法更优化时,其击中率更高,漏报率也更低。
此外,靶标的运动状态也对击中率和漏报率产生影响。
可以看出,对于随机运动的靶标,鱼雷的击中率相对较低,且漏报率相对较高,这是因为靶标的运动状态使鱼雷难以精准锁定目标,建议加强对鱼雷控制算法的改进,以提升其击中率和漏报率。
2、制导精度和靶标深度
在试验中,我们发现鱼雷制导精度和靶标深度的设定对鱼雷攻击效果有直接的影响。
仿真结果表明,当鱼雷制导精度更高时,其击中率更高,漏报率更低。
而当试验靶标在深度相对较浅的
情况下,鱼雷的攻击效果较好。
这一结论表明,我们需要在设计鱼雷时,注重制导精度和靶标深度的设定,以提高鱼雷的攻击效果。
3、靶标速度和方向以及鱼雷攻击角度
在实验中,我们将鱼雷速度和方向与试验靶标不同的运动状态进行仿真,结果表明,不同的靶标速度和方向与不同鱼雷攻击角度下,其击中率和漏报率均有差异。
在实际应用中,我们需要针对不同的情况优化鱼雷控制算法,以提高攻击效果。
4、声纳频率和靶标距离
最后,在试验中我们还分析了声纳频率和靶标距离对鱼雷探测能力的影响。
结果表明,声纳频率越高,探测能力越强。
而靶标距离也对探测能力有影响,随着靶标距离的增加,探测能力逐渐降低。
针对这一结论,我们建议在实际应用中,需要根据实际情况进行声纳频率和靶标距离的调整。
案例分析:某国海军在一次实战演练中使用了主动声自导鱼雷进行攻击,试验结果显示,鱼雷的攻击效果不尽如人意,存在很大的改进空间。
针对这一情况,该国海军聘请专业团队进行仿真分析,得出了如上述数据,并通过数据分析得出了以下结论:
1、鱼雷控制算法需要更优化,以提高击中率和漏报率。
2、制导精度和靶标深度的设定对鱼雷攻击效果有直接的影响。
3、对于不同的靶标速度和方向与不同鱼雷攻击角度需作出针
对性优化。
4、声纳频率和靶标距离的调整也会影响鱼雷探测能力。
结合上述结论以及案例描述,我们可以得出以下总结:
1、对于主动声自导鱼雷的攻击效果要求较高,在进行实际应
用前,需要对其进行充分的仿真试验,以不断进行改进和优化。
2、在鱼雷的设计中,应重视制导精度和靶标深度的设定,同
时也要考虑靶标的运动状态和速度、方向等因素,以提高鱼雷的攻击效果。
3、在实际应用中,应针对不同的情况进行鱼雷控制算法的优化,同时也要根据实际情况进行声纳频率和靶标距离的调整,以提高鱼雷的攻击效果。
4、通过对主动声自导鱼雷的仿真试验和数据分析,可以对其
攻击效果进行全面评估和优化,为提高鱼雷攻击效能提供理论和数据支持。