目标检测的红外和可见光图像融合
图像融合简述

图像融合简述1、图像融合:图像融合是指将多幅图像,在经过去噪、配准等预处理后,再依据某些融合规则合成⼀幅图像的过程。
融合图像对⽬标的描述更清晰和准确,更适合图像后续的处理。
(多传感器图像融合(可见光图像和红外图像融合)、单⼀传感器多聚焦图像融合)图像融合需要遵守的3个基本原则:1)融合后图像要含有所有源图像的明显突出信息;2)融合后图像不能加⼊任何的⼈为信息;3) 对源图像中不感兴趣的信息,如噪声要尽可能多地抑制其出现在融合图像中。
融合图像的作⽤①图像增强。
通过综合来⾃多传感器(或者单⼀传感器在不同时间)的图像,获得⽐原始图像清晰度更⾼的新图像。
②特征提取。
通过融合来⾃多传感器的图像更好地提取图像的特征,如线段,边缘等。
③去噪。
④⽬标识别与跟踪。
⑤三维重构。
2、图像融合应⽤领域图像融合技术的研究呈不断上升的趋势,应⽤领域也遍及遥感图像处理,可见光图像处理,红外图像处理,医学图像处理等。
3、⼏种典型的数字图像融合⽅法主成分分析法差分演化计算法(DE)遗传算法 GA粒⼦群算法(PSO)蚁群算法神经⽹络法⼩波变换法模糊图像融合。
如果按研究⽅法分类,彩⾊图像融合⼤体可以分为两类:基于⼈的视觉系统和直接基于物理光学。
基于物理光学的研究是直接在颜⾊空间RGB中对图像进⾏处理、融合。
⽽基于⼈的视觉系统的融合,更多是从感官上在⾊彩的 HI V空间对图像进⾏融合。
4、融合过程:图像融合的⽅法很多,按照信息提取的层次从低到⾼的原则可划分为 3 类:像素级图像融合、特征级图像融合和决策级图像融合。
像素级融合依据⼀定的融合规则直接对源图像基于像素的特征进⾏融合,最后⽣成⼀幅融合图像的过程。
它保留源图像的原始信息最多、融合准确性最⾼,但该类⽅法也存在着信息量最⼤、对硬件设备和配准的要求较⾼、计算时间长和实时处理差等缺点。
特征级图像融合是⾸先对源图像进⾏简单的预处理,再通过⼀定模型对源图像的⾓点、边缘、形状等特征信息进⾏提取,并通过合适的融合规则进⾏选取,再依据⼀定的融合规则对这些特征信息进⾏选取和融合,最后⽣成⼀幅融合图像的过程。
基于像素级图像融合的Mean Shift目标跟踪

Microcomputer Applications V ol.27,No.4,2011研究与设计微型电脑应用2011年第27卷第4期5文章编号:1007-757X(2011)04-0025-03基于像素级图像融合的Mean Shift 目标跟踪张国华,卜纪伟,薛雷,肖刚,潘汉摘要:针对可见光、红外单模图像序列进行Mean Shift 目标跟踪时存在的问题,提出了先对可见光、红外图像序列进行像素级动态图像融合,采用加权平均融合和基于区域目标检测的图像序列融合框架,再对融合结果进行Mean Shift 目标核函数直方图建模,然后进行匹配跟踪。
实验采用了实际图像序列。
实验结果表明,针对目标进行跨背景区域的运动,该方法较采用单模图像序列进行跟踪具有更好的鲁棒性,并且满足实时性的要求。
关键字:图像融合;动态图像融合;Mean Shift;目标跟踪;融合跟踪中图分类号:TP311文献标志码:A0引言目标跟踪一直是计算机视觉的一个重要组成部分和研究热点。
所谓目标跟踪就是在视频图像序列的每幅图像中找到感兴趣的运动目标所处的区域,并对这些目标和区域进行定位的过程。
一个好的视频跟踪算法一般须满足两个基本要求:实时性与鲁棒性。
而这两条通常难于同时满足,往往需要某种折中,以得到较好的综合性能。
自从Comaniciu [1]等人把Mean Shift 算法用于目标跟踪取得很大成功后,近年来研究者已经提出了许多改进算法,且具有计算简单、实时性好等特点,得到了广泛的应用。
然而不管是针对可见光图像还是红外图像,当目标特征不明显、存在很大背景杂波或目标从一背景区域运动到另一背景区域等情况下,这些问题使得目标跟踪变得困难起来。
图像融合正是对从同一场景得到的不同模态的图像进行智能的合并,得到该场景的单一的扩展了的景象描述。
目前基于红外与可见光双传感器的图像融合已经发展非常迅速,很多学者已提出了多种图像融合算法,并得到了很好的效果。
基于DSP与FPGA的红外与可见光实时图像融合系统硬件设计
件 为 美 国 德 州 公 司 的 新 一 代 数 字 信 号 处 理 器
收稿 日期 :20 —0 0 8 9—1 7
作者简介 :邢素霞(9 5 )女, 17 一 , 山东单县人, 讲师 , 博士, 主要从 事光 电信息处理方面的研究
第2 6卷 第 6期
邢 素 霞 : 于 D P与 F G 的 红 外 与 可 见 光 实 时 图像 融 合 系统 硬 件设 计 基 S PA
了实 时图像融 合硬件 系统 .该 系统具 有速度 快 、 体积 小、 功耗 低 等优点 .
关键 词 :图像融 合 ; MS 2 DM6 2 T 30 4 ;实时 处理 ; P系统 ;红外 图像 DS 中图分类号 :T 3 14 P 9 .1 文献 标识码 : A TMS 0 M6 2和 A t a的 C c n 2D 4 lr e yl e系 列 的 F G - o P A E I6 P C .另外 , 系统设 有大 容量存 储 器 S AM(tt R s i ac
V 12 o 6 o.6N .
No . 0 8 v 20
文章编号 :6 11 1 ( 08 0 —040 17 5 3 2 0 ) 60 4 —4
基 于 D P与 F G S P A的红 外 与 可见 光 实时 图像融 合 系统 硬 件设 计
邢 素 霞
( 京工商 大 学 信 息工程 学院 ,北 京 1 0 4 ) 北 0 0 8
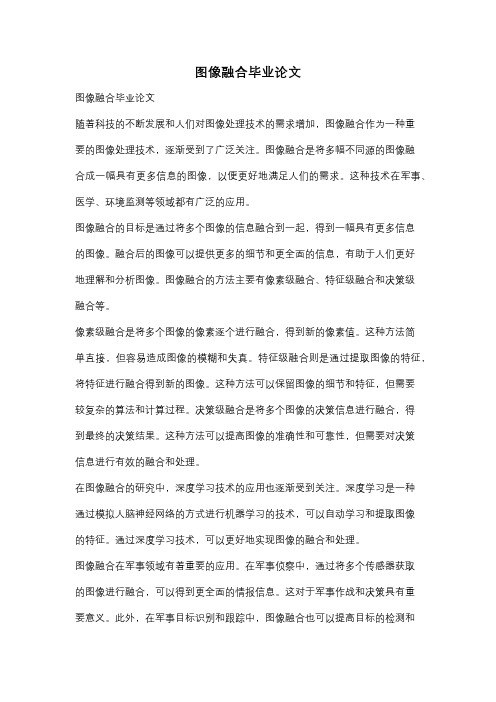
VR M2 然 后在 F G A , P A中 进行 图像 预 处理 , 图像 预
1 实 时 图像 融 合 系 统 硬 件设 计原 理
实时 图像融 合 系统原 理 框 图 见 图 1 .其 核 心部
处理 包括 图像 的去 噪和 配 准 , 准后 的 数 据送 入 视 配
无人机红外图像采集与缺陷检测系统说明书

一种风机叶片图像采集及缺陷检测系统赵春溢,郭洪涛,郭 涛,梁 国,荆海城(中电投东北新能源发展有限公司,辽宁沈阳 110179)摘要:本文针对目前风机叶片人工检测工作量大、效率低、缺陷检测准确率不高的问题,提出并设计了一种基于无人机图像的缺陷自动化检测系统。
本文介绍了系统的图像采集系统、采集方法、缺陷检测原理及检测效果:系统以无人机为飞行载体实现了(风机叶片的)自动巡检,从而提高了巡检效率,降低了人工的工作量;通过图像分割及缺陷检测算法设计实现了缺陷可疑区域的自动检测;可见光加红外光双光融合提高了叶片缺陷自动识别的准确性。
经过多次现场测试验证,本系统可以精确、快速地实现鼓包,裂纹和褶皱等缺陷的自动识别与检测。
关键词:无人机;风机叶片;缺陷检测;图像处理中图分类号:TP391 文献标识码:A 文章编号:1001-8891(2020)10-1203-08Defect Detection System Based on UA V Images for Wind Turbine BladesZHAO Chunyi,GUO Hongtao,GUO Tao,LIANG Guo,JING Haicheng(SPIC Northeast New Energy Development Co., Ltd., Shenyang 110000, China)Abstract:This study proposes and designs an automatic defect detection system based on UAV images for wind turbine blades, aimed at alleviating problems with manual detection methods, such as low efficiency and inaccurate defect detection. This paper introduces the system's image acquisition system, acquisition method, defect detection principle, and detection result. This system uses a UAV as the flying carrier to realize automatic inspection of wind turbine blades, thereby improving the inspection efficiency and reducing the manual workload. Through image segmentation and defect detection algorithm design, automatic detection of suspicious defect areas is achieved. Double light fusion of visible and infrared light improves the accuracy of automatic blade defect recognition. After multiple field tests and verification, the system is shown to accurately and quickly realize the automatic identification and detection of defects, such as bulges, cracks, and wrinkles.Key words:UAV, wind turbine blade, defect defection, image processing0 引言目前中国已是全球最大的风电市场。
图像融合毕业论文
图像融合毕业论文图像融合毕业论文随着科技的不断发展和人们对图像处理技术的需求增加,图像融合作为一种重要的图像处理技术,逐渐受到了广泛关注。
图像融合是将多幅不同源的图像融合成一幅具有更多信息的图像,以便更好地满足人们的需求。
这种技术在军事、医学、环境监测等领域都有广泛的应用。
图像融合的目标是通过将多个图像的信息融合到一起,得到一幅具有更多信息的图像。
融合后的图像可以提供更多的细节和更全面的信息,有助于人们更好地理解和分析图像。
图像融合的方法主要有像素级融合、特征级融合和决策级融合等。
像素级融合是将多个图像的像素逐个进行融合,得到新的像素值。
这种方法简单直接,但容易造成图像的模糊和失真。
特征级融合则是通过提取图像的特征,将特征进行融合得到新的图像。
这种方法可以保留图像的细节和特征,但需要较复杂的算法和计算过程。
决策级融合是将多个图像的决策信息进行融合,得到最终的决策结果。
这种方法可以提高图像的准确性和可靠性,但需要对决策信息进行有效的融合和处理。
在图像融合的研究中,深度学习技术的应用也逐渐受到关注。
深度学习是一种通过模拟人脑神经网络的方式进行机器学习的技术,可以自动学习和提取图像的特征。
通过深度学习技术,可以更好地实现图像的融合和处理。
图像融合在军事领域有着重要的应用。
在军事侦察中,通过将多个传感器获取的图像进行融合,可以得到更全面的情报信息。
这对于军事作战和决策具有重要意义。
此外,在军事目标识别和跟踪中,图像融合也可以提高目标的检测和识别准确性。
在医学领域,图像融合可以用于医学影像的处理和分析。
通过将多个医学影像进行融合,可以得到更全面的病情信息,有助于医生做出更准确的诊断和治疗方案。
此外,图像融合还可以用于医学影像的重建和增强,提高影像的质量和清晰度。
环境监测是另一个图像融合的应用领域。
通过将多个传感器获取的图像进行融合,可以更好地监测和分析环境中的变化和问题。
例如,通过将红外图像和可见光图像进行融合,可以提高对于火灾、烟雾等灾害的监测和预警能力。
“低慢小”目标的光电与雷达复合探测跟踪方法
“低慢小”目标的光电与雷达复合探测跟踪方法摘要:光电跟踪系统的研究多偏于对图像检测算法的提升,奚玉鼎提出一种快速搜索控制“低慢小”目标的光电系统,该系统利用相机采集图像,经过图像处理检测算法实现“低慢小”目标的搜索探测。
通过可见光和红外图像的有效融合来检测“低慢小”,提出了一种基于一维信息熵和加权平均的ROI提取模块,减少背景信息的干扰;其次,利用局部SuBSENSE方法进行局部背景建模,完成“低慢小”目标的精确检测。
以上研究,大多都集中在目标检测跟踪研究,重点多偏于算法提升,较少涉及搜索跟踪切换关键环节。
雷达系统和光电系统各有优缺点,对于一套完整的“低慢小”探测跟踪系统,雷达主要负责目标探测,其探测距离和探测范围指标均优于光电系统。
而从目标定位精度上来说,雷达系统的精度在度级,而光电系统的精度在微弧度级。
雷达有近距离盲区,无法对近距离目标进行探测,此时光电跟踪系统可以弥补雷达探测盲区。
雷达仅获取目标的位置信息,以及目标移动速度信息,SAR成像周期较长,而光电系统能够实时获得目标的可视化图像和视频信息,同时光电系统跟踪时可利用雷达探测的目标距离信息进行焦距调节。
单台雷达对目标的位置测量,其距离与角度上的系统偏差对于所有的目标都相同,所以对跟踪系统的性能不会造成较大的影响和提升。
本文主要分析“低慢小”目标的雷达与光电复合探测跟踪方法。
关键词:低慢小;脉冲多普勒雷达;光电;数据配准;扩展卡尔曼引言“低慢小”目标是指较低空域飞行,较慢飞行速度,且外形特性小(不易被发现)的飞行器与悬空物。
常见的“低慢小”目标有多旋翼无人机,固定翼轻型飞机,热气球等。
由于“低慢小”目标体积小,机动性强,具有一定载弹能力,很容易对机场,油田等有关国防、民生的重要的设施构成威胁,所以对“低慢小”目标进行全天时,全天候探测与防范有着重要意义和价值。
基于雷达的“低慢小”目标探测研究通常是基于检测算法的提升进而检测能力,针对强杂波环境下的小目标被杂波淹没的情况,利用小波变换和主成分分解可以实现雷达小目标信号与杂波信号的分离,从而达到杂波抑制和小目标检测的目的。
针对融合图像的均值位移跟踪方法
对 融合 图像 的均值位移跟踪 方法 。
2 图像融合方法
基于 红外与 可见光双 传感 器的图像融合技术 已经十分成
熟 ,很 多学者提 出了多种 图像 融合算法 ,并得到 了很好 的效
作者倚介 : 薛
融合识别 ;肖
雷( 8 一) 男 , 15 , 9 硕士研究 生, 主研方向 : 图像处理 ,
最简单的图像 融合 方法 是对 2幅源 图像进行像素级线性
加权 平均 (V ) A E:
F(,,=w A(,,+wn B(,, x) ) a・ x ) ) — x ) ) () 1
本文研究了基于 可见光与红外 图像 的像素级动态 图像 融
合对均值位移( a hf 目标跟踪算法的影响 ,提 出一种针 MenS i ) t
图像 进行像素级动态 图像融合 ,利用 Men h t a i 算法进行 目 S f 标跟踪 。采 用真实数据进行 实验 ,并对 实验结果进行稳态的位置均方根误差评 价。结果表 明,在跨背景 区域及复杂 背景下 ,采用该方法对 目标进行运动 跟踪 ,能满 足鲁棒 性及实时性要求。 关键 词 :融合跟踪 ;像素级 图像 融合 ;动态 图像融合 ;目标跟踪 ;均值位移
tr e e e to o m a e p x ll v l d n mi m a e f s o f v d o fo a g t d t ci n t k i e —e e y a c i g u i n o i e r m ii l d i f a e an r s v s b e a n r r d c l e a .Th a k n t o s s Me i n e t c i g me d u e r h n a Sh f t
基于目标识别的红外与微光图像融合方法
Fu i n o nf a e nd LLL m a e a e n d na i a g tr c g to so fi r r d a i g s b s d o y m c t r e e o nii n
Z HANG u —u ,CUIDo g X J nj n —U, ,HE J n fn ,NI e—e u —e g E W i ,HAN — o g l Yi n , y
摘 要 : 了在 融合 图像 中突 出运 动 目标 , 出 了一种 基 于动 态 目标 检 测 和 识 别 的 图像 融 合 算 为 提 法 。先对 红 外 图像序 列 中的运 动 目标 进行 检 测 和提 取 , 同时对 红 外 和微 光 图像 进 行 融合 , 最后
将提 取到 的红 外 目标与 融合 图像 进行 二 次融合 。试验 结果 表 明 , 算 法获得 的融 合 图像 不仅 具 该
i a e s q e c sa ef s d i t h u i n i g e u n e . Th x e i n a e u t h w h t m g e u n e r u e n o t ef so ma e s q e c s ee p rme t l s lss o t a r
有 普通 融合 算法信 息丰 富的特 点 , 具有 鲜 明的红 外 目标 指 示特 性 。 还
关 键 词 : 视 技 术 ;多 光 谱 成 像 ;图像 融 合 ; 态 目标 识 别 夜 动
中图分类号 : 23 TN 2 文 献标 志码 : A dii. 7 8J 2 13 . 6 2 0 o:0 56 /AO 0 1 20 0 0 1
21 0 1年 1 1月
应
用 光
学
面向目标识别的多特征图像融合技术综述
像寮级 像融合 c
图 像 融
^
¨
I 埘标 识别
fF标跟踪 1 特征级图像融合 来自 多领 域获 得 了广 泛 的应用 。 目前面 临 的 问题 有 :一 是如 何选 择有 效 的数学工 具将 各种 特征 融合 ;二 是 如何 寻找 特 征 间 的相 关 关 系 对 识 别 效 果 的定 量 影
mu t l v la d c mp e e sv t o n i f r t n p o e sn d s n e ii g O we c n g tmo ea c r t d mo e r l b e l —e e i n o r h n i e me h d i n o ma i r c s ig a y t s n ,S a e r c u a e a r e i l o n h z n a
( . hn t n l r n uia doE e t nc sac s tt S a g i 0 2 3 Chn ; 1 C ia Nai a o a t l o Ae c Ra i lcr is o Ree rhI t ue, h n Ha 0 3 , ia ni 2
2 Am v t n e rsna v f c, ee lt ,L , h n H i 0 2 3C ia . r y ii peet ie f e G nr a P A S ag a 2 0 3 , hn) A ao R t oi aS f
数,特征提取的过程 同时也是特征融合的过程 ,即
所 谓 的提取 融合特 征 ,它 是特 征空 间融合 模 型 的重 点和难 点 ,也 是现 阶段特 征 融合研 究 的热 点 。这种
halcon加法运算
halcon加法运算Halcon加法运算Halcon是一种功能强大的机器视觉软件库,广泛应用于工业自动化、医疗影像、无人驾驶等领域。
其中,加法运算是Halcon中常用的图像处理操作之一。
本文将详细介绍Halcon加法运算的原理、应用场景以及具体操作步骤。
一、原理Halcon中的加法运算是指对两幅图像的对应像素进行相加,得到一幅新的图像。
加法运算可以用于图像的融合、增强、去噪等方面,能够提高图像质量和信息提取的准确性。
二、应用场景1. 图像融合加法运算可以将两幅图像的亮度信息进行融合,生成一幅新的图像。
在红外图像和可见光图像融合中,加法运算可以将两幅图像的亮度信息相加,从而使得图像的细节更加清晰,提高目标检测和识别的准确率。
2. 图像增强通过将一幅图像与另一幅图像进行加法运算,可以增强图像的对比度和细节。
例如,在医学影像中,通过将一幅CT图像与一幅MRI 图像进行加法运算,可以得到更清晰、更具信息量的图像,有助于医生进行疾病诊断和治疗。
3. 图像去噪在图像去噪中,加法运算可以用于降低图像中的噪声。
通过将一幅含有噪声的图像与另一幅经过滤波处理的图像进行加法运算,可以减弱噪声对图像的影响,提高图像的质量。
三、操作步骤1. 加载图像使用Halcon的图像加载函数,将需要进行加法运算的两幅图像加载到内存中。
2. 图像预处理根据具体需求,对图像进行预处理。
例如,可以对图像进行灰度化、滤波、边缘检测等操作,以提取出目标区域或减少噪声。
3. 进行加法运算使用Halcon的加法运算函数,对预处理后的两幅图像进行加法运算,得到一幅新的图像。
4. 结果显示与保存将加法运算得到的图像显示在屏幕上,以便观察效果。
同时,可以选择将结果保存到本地磁盘,方便后续使用或分析。
四、总结通过Halcon的加法运算,可以实现图像的融合、增强和去噪等功能,从而提高图像的质量和准确性。
在实际应用中,可以根据具体需求和图像特点,灵活选择加法运算的方式和参数,以达到最佳的效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NSCT2 方法融合图像
本文方法融合图像
关键词
图像处理,图像融合,目标检测,非下采样轮廓波变换
1. 引言
图像融合不是简单的数据叠加,而是对多个图像传感器获得的互补或冗余信息进行集合的过程。它 使得新图像满足图像处理中的特征提取、目标识别或分割的需要。因此,图像融合技术被广泛应用于计 算机视觉、军事、遥感和医学等领域。 红外图像和可见光图像分别是通过红外成像传感器与可见光成像传感器获得的。由于两种传感器工 作原理不同, 性能也就不同。红外图像能较好地反应图像的热目标特性,但对场景亮度变化特征不敏感, 且图像清晰度较低;可见光图像能够较好地反应目标所在的场景细节信息,且清晰度较高。红外和可见 光图像融合能有效地综合红外图像目标特征信息和可见光图像的场景细节信息,得到信息更全面的融合 图像[1]。 拉普拉斯金字塔[2] (LP)和小波变换[3] [4] (DWT)是较常用的多分辨率图像融合工具。但是,它们都 缺乏平移不变性,且方向分析能力有限,不能全面地表示图像信息。非下采样轮廓波变换[5] (NSCT)变换 是一种多尺度、多方向、平移不变的多分辨率工具,利用该工具进行图像融合能有效提取源图像的方向 细节信息,得到融合效果较好的图像。 现阶段的红外和可见光图像融合技术大部分都是对图像融合准则进行研究,该类融合方法不能很好 地保留可见光图像背景细节信息,突出红外目标人物信息[6] [7]。为此,本文引进了目标检测技术。在图 像融合前利用目标检测技术将红外图像分割为背景和目标图像;然后利用 NSCT 变换将红外背景和可见 光图像进行融合得到融合背景图像;再将该融合背景图像和红外目标图像融合得到最后的融合图像。
L L CF ( i, j ) = wA ( i, j ) × CVL ( i, j ) + wB ( i, j ) × CIR ( i, j )
(1)
C L ( i, j ) − µ IR , j ) exp − wB ( i= 2σ 2
wA ( i, j ) = 1 − wB ( i, j )
5. 基于目标检测的红外和可见光图像融合
本文提出一种基于目标检测的红外和可见光图像融合方法,具体步骤如下:
NSB NSDFB 低通子带
图像
带通 方向 子带 带通 方向 子带
Figure 1. NSCT decomposition 图 1. NSCT 分解示意图
49
目标检测的红外和可见光图像融合
1) 运用节 1 一维灰度直方图熵和 Sobel 边缘检测相结合的目标检测方法将红外图像分割为目标与背 景区域; 2) 运用节 2 的 NSCT 变换将红外背景和可见光图像分别分解为低频子带和高频子带; 3) 运用节 3 的高斯模糊逻辑融合准则将红外背景区域低频子带和可见光图像低频子带进行融合得到 融合背景图像低频子带;运用节 3 的绝对值取大融合准则将红外背景区域高频子带和可见光图像高频子 带进行融合得到融合背景图像高频子带; 4) 运用 NSCT 逆变换将融合背景图像低频和高频子带融合得到融合背景图像; 5) 运用加权融合准则将红外目标和融合背景融合图像融合得到最终融合图像。具体准则如下:
2. 目标检测
图像的目标区域里包含重要目标信息,且目标信息应尽可能地保留,目标检测的目地就是分割出源 图像的目标和背景区域。在红外图像中,热目标人物特征比较清晰,且目标区域灰度均值要远高于背景 区域灰度均值,因此可利用这一特征将红外图像中的目标人物检测出来。本文运用一种结合灰度直方图 熵法[8]和 Sobel [9]边缘检测的红外图像目标检测方法,该方法可以较准确地检测出红外目标图像。 首先,运用一维灰度直方图熵法得到红外图像分割目标的阈值;再运用 Sobel 边缘检测得到红外图 像可能的目标图像边缘, 计算得到边缘内部区域均值; 最后, 比较均值和阈值的大小。 如果均值 > 阈值, 对应区域是目标区域; 否则就是背景区域。 经过这些步骤检测出红外图像的目标区域, 进而得到背景区域。
3. NSCT 变换
非下采样轮廓波变换(Nonsubsampled Contourlet Transform, NSCT)是一种重要的多尺度几何分析工具。
48
目标检测的红外和可见光图像融合
它具备平移不变性,有很好的方向性,能更好地表达图像的边缘方向信息。 NSCT 变换首先运用非下采样塔式滤波器组 NSP 对图像进行多尺度分解,再运用非下采样方向滤波 器组 NSDFB 对第一步得到的各带通子带图像进行分解,得到图像不同尺度、方向上的子带系数。 NSCT 的多尺度特性是通过平移不变的滤波器结构获得的,它利用一个双通道二维非下采样滤波器 组完成类似于拉普拉斯金字塔的分解。图像经过一级 NSP 分解得到一个与源图像大小相同的低频子带和 高频子带图像,经过 N 级分解得到 N 个不同尺度下的高频子带图像和 1 个低频子带图像。对某一尺度下 的子带图像运用 NSDFB 进行 l 级分解,就能得到与原图像大小相同的 2 l 个不同方向的子带图像,如图 1 所示。
Received: Jun. 26th, 2015; accepted: Jul. 9th, 2015; published: Jul. 14th, 2015 Copyright © 2015 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
= F ( i, j ) w1 IR _ O ( i, j ) + w2 B ( i, j )
(4)
பைடு நூலகம்
其中 F ( i, j ) 表示融合图像, IR _ O ( i, j ) 表示红外目标图像, B ( i, j ) 表示背景融合图像, w1 , w2 表示权重 系数,且 w1 = 1.0 , w2 = 1.0 。
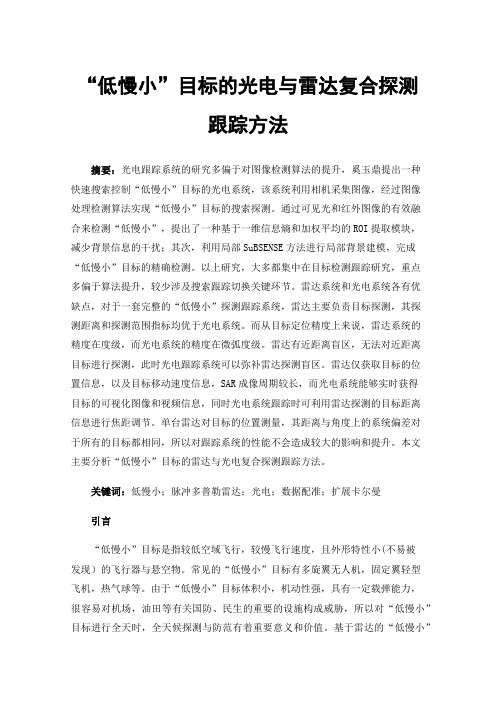
红外图像
可见光图像
LPT 方法融合图像
DWT 方法融合像
NSCT1 方法融合图像
NSCT2 方法融合图像
本文方法融合图像
Figure 2. Simulation 1 图 2. 实验 1
50
目标检测的红外和可见光图像融合
红外图像
可见光图像
LPT 方法融合图像
DWT 方法融合图像
NSCT1 方法融合图像
4. 融合准则
图像融合规则是多分辨率图像融合的核心,它的优劣对融合图像质量的好坏起着重要作用。融合准 则主要包括低频和高频子带融合准则。 图像的低频子带主要包含源图像的近似特性,占据图像的主要能量。在本文融合方法中,低频采用 高斯模糊逻辑[10]权值融合准则。 该融合准则可以较好的保持红外图像的目标信息和可见光图像的背景细 节信息,融合准则如下:
Journal of Image and Signal Processing 图像与信号处理, 2015, 4, 47-52 Published Online July 2015 in Hans. /journal/jisp /10.12677/jisp.2015.43006
Keywords
Image Processing, Image Fusion, Object Detection, Nonsubsampled Contourlet Transform (NSCT)
目标检测的红外和可见光图像融合
李婵飞1,胡锦龙2,韩彦净1
1 2
重庆邮电大学移通学院,重庆 中科院光电技术研究所,四川 成都 Email: 454329847@
Infrared and Visible Light Images Fusion Utilizing Object Detection
Chanfei Li1, Jinlong Hu2, Yanjing Han1
1 2
College of Mobile Telecommunications, Chongqing University of Posts and Telecom, Chongqing The Institute of Optics and Electronics, The Chinese Academy of Sciences, Chengdu Sichuan Email: 454329847@
Abstract
A new image fusion method for infrared and visible light image based on object detection technique is proposed in this paper. The object detection is utilized to separate infrared image into object and background region. And NSCT is applied to fuse the background and visible light image. The final fused image is obtained by fusing the background fused image and infrared object image. Fusion experiments indicate that the proposed method is efficient and effective. Besides, it achieves better performance than the conventional fusion methods.
(
)
2
(2) (3)
L L 其中 C F ( i, j ) 表示融合图像低频系数,CV ( i, j ) 和 CIR ( i, j ) 分别表示红外和可见光图像的低频系数,wA 和