飞机电传操纵系统
飞机飞行操纵系统
安全问题
安全标准
01
确保飞行操纵系统符合国际国内安全标准,系统进行严格质量
控制测试。
ቤተ መጻሕፍቲ ባይዱ
冗余设计
02
防止单一故障导致系统失效,采冗余设计,增加系统可靠性安
全性。
紧急备份系统
03
紧急情况提供备份操纵系统,确保飞行员能够控制飞机并采取
必紧急措施。
技术更新问题
持续研发
断投入研发资源,更新改进飞行操纵系统,满足航空工业发展需 求。
电动操纵系统
电动操纵系统通过电动机传动装置将飞行员操作指令传递 舵面,实现飞行姿态航向操纵。
电动操纵系统优点结构简单、可靠性高、维护成本低,且 易实现自动控制远程操控。现代飞机中,电动操纵系统已 经成主流飞行操纵系统之一。
气压操纵系统
气压操纵系统利气压差将飞行员操作指令传递舵面,实现飞行姿态航向操纵。
发展历程
飞机飞行操纵系统经历从简单机械式复杂电传式演变,技术 断升级换代,提高飞机安全性机动性能。
趋势
未飞行操纵系统发展将更加注重智能化、自主化、复合控制 等方面,提高飞机自主飞行能力适应复杂环境能力。随着无 驾驶技术断发展,无机飞行操纵系统也将成研究重方向。
02
飞行操纵系统种类
机械操纵系统
机械操纵系统最早飞行操纵系统,通过钢索、滑轮连杆等机 械部件将飞行员操作指令传递飞机各舵面,实现飞行姿态航 向操纵。
飞机飞行操纵系统
目 录
• 飞机飞行操纵系统概述 • 飞行操纵系统种类 • 飞行操纵系统关键技术 • 飞行操纵系统应 • 飞行操纵系统挑战与解决方案 • 未飞行操纵系统发展趋势
01
飞机飞行操纵系统概述
定与功能
定
飞机飞行操纵系统指控制飞机飞行姿 态轨迹操作系统,包括飞行控制系统 飞行操纵系统。
飞机电传操纵系统控制律的神经网络实现

1 电传操纵系统控制律
随着飞机性能的不断提高, 简单的机械操纵系统已远不 能满足飞行品质的要求。 而采用电传操纵系统, 可明显地减 少操 纵系统的重 量和体积, 节省了设 计和安装 时间, 提高了 飞机 操纵系统的 可靠性、 生存性, 大大改善 了飞机的 操纵品 质。 电传操纵系统的控制律, 习惯上是指控制面的偏转角随
Vol . 33, S up p lem ent A p ril, 2008
火 力 与指 挥 控 制
F ire Co nt ro l and Comm and Co n tro l
第 33 卷 增 刊
文章编号: 100220640 2(2008) 增刊20143202
飞机电传操纵系统控制律的神经网络实现
14 4
火 力 与指 挥 控 制
2008 年 增 刊
( q)、 静压 ( p )、 法向过载 (ny ) 及 俯仰角速度 ( Ξz ) 相关, 可将它
们的关系表示为[5 ]: Δed = f (X p , p , q, n y , Ξz ) 状态。 在实际的系统中, 俯仰杆位移信号和飞控系统输入 的当 量杆位移信号叠加后输入至俯仰通道计算器, 俯仰通道 计算 器再应用俯 仰角速度、 法向过载 及动静压信 号进行 修正, 形 成对平尾左右舵面驱动装置的控制信号 。 其纵向通道飞行状 态结构图如图 1 所示。 信号 ( 前馈部分所得平尾信号)。 RB F 网络隐层第 i 个节点的 输出为 [7]:
影响飞机气动导数的变量, 如动、 静压等) 的划分来选 择能覆 盖整个飞行包线范围的平衡工作点, 构造对象在每一个 平衡
收稿日期: 2 00 7201 2 06 作者 简介: 胥新军 (1 98 22 ) , 男, 湖南 汨罗人, 硕 士研究 生, 主要研究方向: 飞行控制系统。
ATA 27 操纵系统

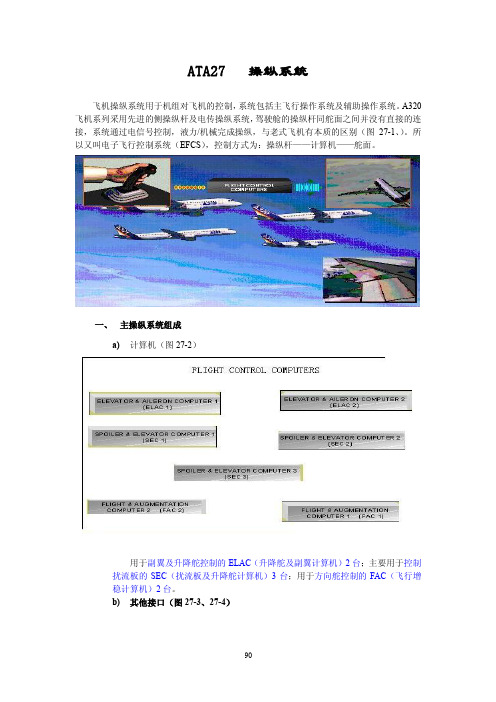
ATA27 操纵系统飞机操纵系统用于机组对飞机的控制,系统包括主飞行操作系统及辅助操作系统。
A320飞机系列采用先进的侧操纵杆及电传操纵系统,驾驶舱的操纵杆同舵面之间并没有直接的连接,系统通过电信号控制,液力/机械完成操纵,与老式飞机有本质的区别(图27-1、)。
所以又叫电子飞行控制系统(EFCS),控制方式为:操纵杆——计算机——舵面。
一、主操纵系统组成a)计算机(图27-2)用于副翼及升降舵控制的ELAC(升降舵及副翼计算机)2台;主要用于控制扰流板的SEC(扰流板及升降舵计算机)3台;用于方向舵控制的FAC(飞行增稳计算机)2台。
b)其他接口(图27-3、27-4)ELAC 及SEC 并不是直接向EIS 提供数据用于显示,他们是通过FCDC 向EIS 提供数据,而FAC 则直接向EIS 提供数据去显示。
c) 系统控制及ECAM 页面显示图27-5液力系统图27-6副翼(偏航控制):每个副翼有两个液力作动筒,分别由ELAC1及2控制,正常情况下一个工作另外一个随动。
图27-7升降舵(短时间的俯仰控制):每个升降舵有两个液力作动筒,分别由ELAC1及2控制(SEC备用),正常情况下一个工作另外一个随动。
侧操纵杆向ELAC发送指令。
图27-8 全动式水平安定面THS(长时间的俯仰控制):依然由ELAC控制,与升降舵不同的是,两台计算机同时对舵面进行控制,两个液力系统也同时完成操作,若计算机或液力有一个失效则舵面半速工作。
若电控制失效,则还可以利用纯机械控制来完成俯仰操作(指令由机组通过位于中央操纵台的THS控制手轮输入)。
在工作中具体由THS还是升降舵完成控制则由ELAC计算后发出指令。
27-9 方向舵(偏航控制)3个作动筒分别由3套液力系统提供动力,3个作动筒同时工作,由FAC1控制,FAC2备用。
FAC接受方向舵配平旋钮的指令。
系统在ECAM 系统显示器的页面显示(图27-10、27-11)d)系统部件安装位置侧操纵杆图27-12;两个侧操纵杆具有相同的操作优先权,舵面偏转动作为两个机组人员指令的代数和。
ATA_27_操纵系统
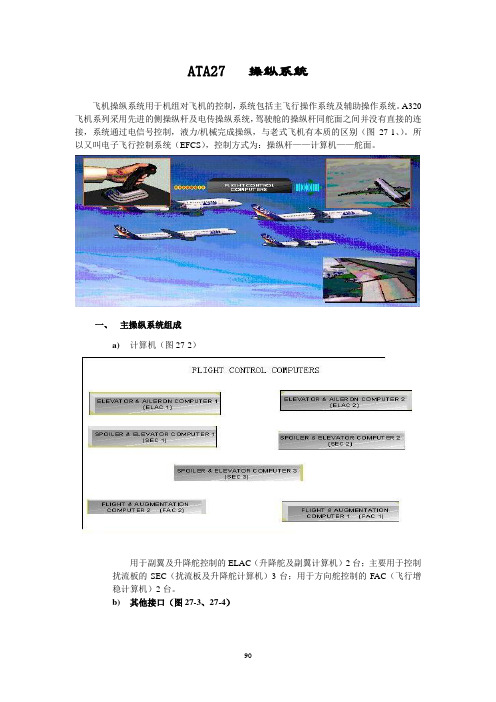
ATA27 操纵系统飞机操纵系统用于机组对飞机的控制,系统包括主飞行操作系统及辅助操作系统。
A320飞机系列采用先进的侧操纵杆及电传操纵系统,驾驶舱的操纵杆同舵面之间并没有直接的连接,系统通过电信号控制,液力/机械完成操纵,与老式飞机有本质的区别(图27-1、)。
所以又叫电子飞行控制系统(EFCS),控制方式为:操纵杆——计算机——舵面。
一、主操纵系统组成a)计算机(图27-2)用于副翼及升降舵控制的ELAC(升降舵及副翼计算机)2台;主要用于控制扰流板的SEC(扰流板及升降舵计算机)3台;用于方向舵控制的FAC(飞行增稳计算机)2台。
b)其他接口(图27-3、27-4)ELAC 及SEC 并不是直接向EIS 提供数据用于显示,他们是通过FCDC 向EIS 提供数据,而FAC 则直接向EIS 提供数据去显示。
c) 系统控制及ECAM 页面显示图27-5液力系统图27-6副翼(偏航控制):每个副翼有两个液力作动筒,分别由ELAC1及2控制,正常情况下一个工作另外一个随动。
图27-7升降舵(短时间的俯仰控制):每个升降舵有两个液力作动筒,分别由ELAC1及2控制(SEC备用),正常情况下一个工作另外一个随动。
侧操纵杆向ELAC发送指令。
图27-8 全动式水平安定面THS(长时间的俯仰控制):依然由ELAC控制,与升降舵不同的是,两台计算机同时对舵面进行控制,两个液力系统也同时完成操作,若计算机或液力有一个失效则舵面半速工作。
若电控制失效,则还可以利用纯机械控制来完成俯仰操作(指令由机组通过位于中央操纵台的THS控制手轮输入)。
在工作中具体由THS还是升降舵完成控制则由ELAC计算后发出指令。
27-9 方向舵(偏航控制)3个作动筒分别由3套液力系统提供动力,3个作动筒同时工作,由FAC1控制,FAC2备用。
FAC接受方向舵配平旋钮的指令。
系统在ECAM 系统显示器的页面显示(图27-10、27-11)d)系统部件安装位置侧操纵杆图27-12;两个侧操纵杆具有相同的操作优先权,舵面偏转动作为两个机组人员指令的代数和。
飞机操纵系统的组成

飞机操纵系统的组成
飞机操纵系统由主操纵系统和辅助操纵系统组成。
主操纵系统主要用于控制飞机的升降舵、副翼和方向舵,而辅助操纵系统则包括调整片、襟翼、减速板、可调安定面和机翼变后掠角操纵机构等,用于控制飞机的运动状态。
主操纵系统通过驾驶杆和脚蹬来控制飞机的升降舵、副翼和方向舵的操纵机构,以控制飞机的飞行轨迹和姿态。
中央操纵机构由驾驶杆和脚蹬组成,通过传动装置直接偏转舵面,传递操纵信号。
辅助操纵系统则包括调整片、襟翼、减速板、可调安定面和机翼变后掠角操纵机构等。
这些机构仅靠驾驶员选择相应开关、手柄位置,通过电信号接通电动机或液压作动筒来完成操作。
此外,机械操纵系统还包括驾驶员通过机械传动装置直接偏转舵面的部分。
这种系统由两部分组成:位于驾驶舱内的中央操纵机构和构成中央操纵机构和舵面之间机械联系的传动装置。
飞机操纵系统的组成因飞机类型和设计而异,但上述部分是常见于现代飞机的操纵系统的重要组成部分。
随着技术的发展,一些新型的飞机还采用了电传操纵系统和主动控制技术等更先进的技术。
A320机型介绍ATA27
ATA27 操纵系统飞机操纵系统用于机组对飞机的控制,系统包括主飞行操作系统及辅助操作系统。
A320飞机系列采用先进的侧操纵杆及电传操纵系统,驾驶舱的操纵杆同舵面之间并没有直接的连接,系统通过电信号控制,液力/机械完成操纵,与老式飞机有本质的区别(图27-1、)。
所以又叫电子飞行控制系统(EFCS),控制方式为:操纵杆——计算机——舵面。
一、主操纵系统组成a)计算机(图27-2)用于副翼及升降舵控制的ELAC(升降舵及副翼计算机)2台;主要用于控制扰流板的SEC(扰流板及升降舵计算机)3台;用于方向舵控制的FAC(飞行增稳计算机)2台。
b)其他接口(图27-3、27-4)ELAC及SEC并不是直接向EIS提供数据用于显示,他们是通过FCDC向EIS提供数据,而FAC则直接向EIS提供数据去显示。
c)系统控制及ECAM页面显示图27-5液力系统图27-6副翼(偏航控制):每个副翼有两个液力作动筒,分别由ELAC1及2控制,正常情况下一个工作另外一个随动。
图27-7升降舵(短时间的俯仰控制):每个升降舵有两个液力作动筒,分别由ELAC1及2控制(SEC备用),正常情况下一个工作另外一个随动。
侧操纵杆向ELAC发送指令。
图27-8 全动式水平安定面THS(长时间的俯仰控制):依然由ELAC控制,与升降舵不同的是,两台计算机同时对舵面进行控制,两个液力系统也同时完成操作,若计算机或液力有一个失效则舵面半速工作。
若电控制失效,则还可以利用纯机械控制来完成俯仰操作(指令由机组通过位于中央操纵台的THS控制手轮输入)。
在工作中具体由THS还是升降舵完成控制则由ELAC计算后发出指令。
27-9 方向舵(偏航控制)3个作动筒分别由3套液力系统提供动力,3个作动筒同时工作,由FAC1控制,FAC2备用。
FAC接受方向舵配平旋钮的指令。
系统在ECAM系统显示器的页面显示(图27-10、27-11)d)系统部件安装位置侧操纵杆图27-12;两个侧操纵杆具有相同的操作优先权,舵面偏转动作为两个机组人员指令的代数和。
A320飞机飞行操纵系统的失效情况介绍
A320飞机飞行操纵系统的失效情况介绍众所周知A320飞机是电传操纵系统,“电传操纵”一词从字面仅仅意味其是一个通过电信号实现控制的系统。
但事实上,这是一个通过计算机控制的系统,在飞行员和最终的控制执行机构或舵面之间,计算机系统通过软件程序实际上修改了飞行员的输入,所以可以认为飞行操纵系统的核心是计算机。
本文对飞行操纵系统失效的情况作了总结,以增强飞行员对该系统故障时ECAM指示的认知。
标签:A320飞机;飞行操作;系统研究1 计算机失效有七部飞行操纵计算机根据飞行操纵法则处理飞行员和自动驾驶的输入。
它们包括两个ELAC(升降舵副翼计算机),提供正常升降舵,安定面和副翼操纵;三个SEC(扰流板升降舵计算机),提供扰流板,备用升降舵和安定面操纵;两个FAC(飞行增稳计算机),提供方向舵电动操纵,方向舵配平和偏航阻尼器操纵。
每一个飞行控制面由不同的液压源供压。
副翼,升降舵和水平安定面个由两个液压系统供压;方向舵和扰流板各又三个液压系统供压。
每个扰流板仅有三个液压系统之一供压。
每个液压源通过作动器独立操纵相关的飞行操纵面。
每一个液压作动器被一个飞行操纵计算机以两种方式电动控制,一个是生效方式,一个是阻尼方式。
当一个操纵面有两个作动器控制时,一个被相关的计算机操纵在生效方式,一个被相关计算机监控在阻尼方式跟随操纵面的运动。
液压和工作方式由图1所示。
1.1 ELAC1失效如果ELAC1失效,在ECAM上观察到,失效的计算机显示为琥珀色,相关的作动器部分被琥珀色框包围,表示作动器控制已转为阻尼方式。
其它的作动器仍为绿色显示,表示已自动转为生效方式。
1.2 两部ELAC失效如果按程序操作ELAC1计算机复位不成功,将ELAC1计算机关闭,如ELAC2再次失效,两部计算机以琥珀色显示,两个副翼作动器都部分被琥珀色框包围,表示两个作动器都为阻尼方式,副翼位置指示变成琥珀色××,副翼不能正常工作。
民用飞机电传操纵系统设计浅析
民用飞机电传操纵系统设计浅析作者:张大伟来源:《科技创新导报》2011年第30期摘要:电传操纵系统是从上世纪80年代开始在民用飞机上逐步推广使用的飞行操纵系统,它取代了以钢索传动为特征的机械操纵系统,重量更轻,安全性更高。
阐述了电传操纵系统的优缺点,并对飞行操纵系统设计的关键问题进行分析,给出了电传操纵系统的控制律设计和余度设计的基本要求。
希望为民用飞机电传操纵系统的设计和研发提供参考与借鉴。
关键词:民用飞机电传操纵系统中图分类号:V249.1 文献标识码:A 文章编号:1674-098X(2011)10(c)-0056-02飞机操纵系统是驾驶员用来操纵飞机上各操纵面实现飞机姿态、航迹控制的系统。
早期,飞机的主操纵系统只是简单的机械操纵系统。
驾驶员移动驾驶杆或脚蹬,通过由连杆、摇臂、滑轮和钢索等组成的机械传动机构操纵舵面。
随着飞机尺寸和重量的增加,飞行速度的提高,使得飞机舵面上产生了较大的铰链力矩,驾驶员难以用简单的机械操纵系统操纵飞机。
为了克服舵面铰链力矩,20世纪40年代末开始出现了液压助力器,实现了飞机的助力操纵[1]。
然而,到了20世纪60年代,飞机性能要求越来越高,以机械操纵为主体的控制增稳系统已无法满足要求,并且由于机械系统中存在着摩擦、间隙和弹性变形,精微操纵信号传递问题始终难以解决。
飞机设计者们便提出了一种全新的设计方案——电传操纵系统。
1 电传操纵系统简介电传操纵系统是取代机械操纵系统的电飞行控制系统。
它实质上是一种全权限的控制增稳系统。
电传操纵系统是将驾驶员发出的操纵指令转换成电信号,并与飞机运动传感器反馈回来的信号综合,经过计算机处理,把计算结果通过电缆传输到自主式舵机的一种飞行控制系统[2]。
电传操纵系统是完全取代机械操纵系统对飞机实施全时间、全权限操纵的控制增稳系统。
电传操纵系统主要由指令装置、传感器、飞控计算机和作动器等组成,并且一般电传操纵系统都采用余度备份系统,即为完成规定功能而设置的重复架构、备件等[3]。