龙门刨床速度控制系统综述
基于PLC的龙门刨床电气控制系统设计

摘要传统的龙门刨床控制系统可靠性差,维护困难,加工质量及生产效率低.如今PLC 技术的不断发展,用PLC设计电气控制系统是简便可行的方法。
本文介绍的用PLC设计龙门刨床的电气控制系统,不但满足了所需的各种控制功能,而且在节省资金的前提下,还具有结构简单,运行稳定和便于维护等特点。
特别是其硬件简单可靠,软件丰富灵活,运行效果好.以可编程控制器检测速度过零为换向条件实现了工作台的无冲击换向。
以精密电位计为速度给定元件,可手动实时精确地调节主电机转速,从根本上克服了龙门刨床换向冲击大、工作效率不高、耗电量大等一系列缺点。
系统以数字显示输出主电机实时转速和电枢电流值,显示准确、直观。
利用PLC对龙门刨床电控系统进行设计的途径和方法,为改进机床设计提供了新的思路,对促进工业企业技术进步具有一定意义。
关键词:可编程逻辑控制器;龙门刨床;控制系统;直流调速;刨台运动控制ABSTRACTThe traditional control system of gantry planer has the shortcomings in reliability, maintenance,processing of quality and efficiency of production. Now as a result of the PLC technology unceasing development, designing the electrical control system with PLC is a simple and feasible method.This paper presents the design of gantry planer with PLC for the electrical control system,which will satisfy the needs of control functions。
用PLC改造龙门刨床电气控制系统

用PLC改造龙门刨床电气控制系统摘要:本文介绍了如何使用PLC改造龙门刨床电气控制系统,提高了其控制性能和生产效率。
通过安装PLC控制器,并配置相应的逻辑控制程序,实现了对龙门刨床的启动、停止、速度调节、工件夹紧等功能的自动化控制,有效地提高了刨床的生产效率和减少了工人劳动强度。
关键词:PLC,龙门刨床,电气控制系统,自动化控制,生产效率正文:一、龙门刨床的电气控制系统简介龙门刨床是一种常用的大型加工设备,广泛应用于各种金属材料的切削加工和形状加工。
龙门刨床的电气控制系统主要由各种控制按钮、电机控制器、传感器和电气控制箱等组成。
目前,大多数龙门刨床的电气控制系统还是基于传统的电路设计,存在操作不方便、控制性能差、产量低等问题。
二、PLC控制器的优势PLC即可编程序控制器,是一种可编程逻辑控制设备,具有高度可靠性、扩展性和灵活性等特点。
使用PLC控制器改造龙门刨床电气控制系统可以有效地提高其控制性能和生产效率,具有以下优势:1、逻辑控制程序可编程,方便灵活。
2、输入输出模块可扩展,支持多种信号采集。
3、通信接口丰富,可与其他设备联网通信。
4、可靠性高,故障率低,维护成本低。
三、PLC改造龙门刨床电气控制系统的具体步骤及实现效果1、安装PLC控制器在龙门刨床电气控制系统中添加PLC控制器,将其与原有的电气控制元件相连。
根据需要,安装多个输入输出模块,用于控制信号的采集和输出。
2、编写逻辑控制程序利用PLC编程软件编写逻辑控制程序,实现龙门刨床的启动、停止、速度调节、工件夹紧等功能。
通过对节点的逻辑运算和电气控制元件的分配,实现龙门刨床的自动化控制。
3、调试和优化将编写好的逻辑控制程序下载到PLC控制器中,并对其进行调试和优化,确保其正常运行。
在实际的车间环境中,根据需求优化控制程序,达到最佳的控制效果。
使用PLC控制器改造龙门刨床电气控制系统后,可以实现龙门刨床的自动化控制,大大提高了生产效率,缩短了生产周期,减轻了工人劳动强度,同时还可以降低故障率和维护成本。
B2024A龙门刨床的结构及电气控制系统组成

B2024A龙门刨床的结构及电气控制系统组成B2024A龙门刨床是一种常用的金属加工设备,它采用刀具在工件上切削金属,用于加工各种形状的平面和曲面。
下面将详细介绍B2024A龙门刨床的结构和电气控制系统组成。
1.结构组成:B2024A龙门刨床主要由刨床身、龙门架、工作台、刀架、电动机和冷却系统等部分组成。
(1)刨床身:刨床身是整个刨床的支撑结构,通常由铸铁制成,具有足够的刚性和稳定性。
(2)龙门架:龙门架是刨床上面的横梁结构,能够承受刨床的纵向和横向力,并起到支撑刀架、刀具和工作台的作用。
(3)工作台:工作台是用于放置和夹紧工件的平台,通常由铸铁制成,具有充足的刚性和稳定性。
工作台可以沿着龙门架的纵向和横向移动,以实现工件的加工。
(4)刀架:刀架是刨床上的一个移动组件,用于携带刀具进行切削加工。
刀架可以在龙门架的纵向和横向上进行移动,以适应不同形状的工件加工。
(6)冷却系统:刨床在加工过程中会产生大量的热量,为了保证加工质量和延长刀具寿命,通常需要配备冷却系统。
冷却系统通常由冷却液箱、冷却泵和喷液管组成,冷却液通过喷液管冷却工件和刀具。
2.电气控制系统组成:B2024A龙门刨床的电气控制系统主要由电气柜、操作面板和传感器组成,用于实现刨床的自动控制。
(1)电气柜:电气柜是刨床电气控制系统的核心部分,用于集中安装各种电气元件、电子元器件和电气控制设备。
电气柜内部包含主电源开关、控制电源、接线端子、断路器、继电器、PLC等。
(2)操作面板:操作面板通常安装在刨床的侧面或前方,用于控制和调节刨床的运行状态和工艺参数。
操作面板上通常有启停按钮、切削进给速度调节旋钮、加工尺寸调节旋钮、手动和自动模式切换开关等。
(3)传感器:刨床的电气控制系统通常装备各种传感器,用于检测各种加工参数和状态。
常用的传感器有行程开关、限位开关、速度传感器、温度传感器等。
这些传感器可以将所检测到的信息反馈给电气控制系统,实现刨床的自动控制。
PLC控制龙门刨床

摘要龙门刨床是工厂中常见的大型机械加工设备,老式的龙门刨床的主拖动采用交磁放大机-发电机-电动机(JF-D)调速系统,能量损耗高、噪声大。
老式龙门刨床的电控部份采用继电器逻辑控制,线路复杂,故障率高,查找故障困难。
本论文在分析和研究龙门刨床(B2012A)原控制系统的基础上,设计了新的龙门刨床电控系统。
该系统以西门子公司的直流调速器(6RA70)为主要调速控制器件,根据主电机实际转速自动调节电枢电压和电流,平滑改变电动机转速。
刨床各运动部件采PLC 逻辑控制,根据工艺要求可实现各部分单独运动及联动。
以可编程控制器检测速度过零为换向条件,实现了工作台的无冲击换向。
从根本上克服了龙门刨床换向冲击大、工作效率不高、耗电量大等一系列缺点。
论文详细地给出了整个系统电路(包括电机拖动电路、直流调速系统电路及逻辑控制电路)的设计过程和工作原理。
本系统直观性好,控制安全可靠,运行平稳,调速精度高,具有其他龙门刨床控制系统所没有的若干优点,且经济实用,具有广阔的应用前景。
关键词:龙门刨床 PLC控制直流调速AbstractPlaner is common in large-scale factory machining equipment, the old main drag planer magnetic amplifier using AC - Generators - Motors (JF-D) speed control system, high energy consumption, noise big. Old planer electronic control part of the relay logic control circuit complexity, high failure rate, difficult to find fault.In this thesis, analysis and research planer (B2012A) based on the original control system, designed a new electronic control system Planer.The system Siemens DC Driver (6RA70) as the main speed control device, according to the actual speed automatic adjustment of the main motor armature voltage and current, smooth changes in motor speed. Planer PLC logic of the moving parts of the mining control, according to process requirements to achieve separately the various parts of movement and interaction. Programmable controller detects the speed to zero for the change to the conditions for the realization of the table without the impact of the commutation. Papers presented in detail the entire system circuit (including motor drag circuit, the circuit and DC speed control system logic control circuit) design process and work.This system is intuitive and good control of safe, reliable, smooth running, speed, high precision, with other control systems Planer several advantages not available, and economical and practical, has broad application prospects.Keywords: double housing Planer PLC controlling direct Currentspeed regulating目录第 1章概述 (1)1.1 课题的提出 (1)1.2 本课题的研究意义 (2)1.3 龙门刨床电气控制系统的发展历史 (2)1.4 本课题的工艺要求 (3)1.5 主要研究内容 (4)1.6 本章小结 (4)第2章方案论证 (5)2.1 几种可行性方案比较 (5)2.1.1 理想的速度运行曲线 (5)2.1.2 实现理想速度运行曲线的几种方法比较 (6)2.2 龙门刨床的结构特点 (6)2.3 龙门刨床的工艺流程对控制系统的要求 (8)2.4 直流调速装置 (9)2.4.1 直流调速装置的结构与功能特点 (9)2.4.2 主要功能 (10)2.4.3 参数设定方法 (11)2.4.4 斜坡函数发生器 (12)2.4.5 速度调节器 (12)2.5 总体方案设计 (13)2.5.1 系统主要配置和设置 (13)2.5.2 系统工作流程和控制功能实现 (14)2.6 本章小结 (15)第3章PLC的原理及应用 (16)3.1 PLC的应用 (16)3.2 S7-200的结构特点 (17)3.3 本章小结 (19)第4章龙门刨床的硬件电路设计 (20)4.1 工作台控制电路设计 (20)4.2 横梁与刀架电路设计 (21)4.3 润滑泵供电控制电路 (22)4.4 PLC控制逻辑实现 (23)4.4.1 I/O接口设计 (24)4.5 本章小结 (26)第5章控制系统软件设计 (27)5.1 PLC 程序设计方法 (27)5.1.1 PLC 程序设计方法概述 (27)5.1.2 PLC控制逻辑程序设计 (27)5.1.3 程序设计步骤及要点 (28)5.2 梯形图设计方法 (30)5.3 调速控制程序设计 (31)5.4 参数设置 (33)5.5 PLC控制系统若干现场技术的实现 (35)5.5.1 无冲击换向实现 (35)5.5.2 工作台抗干扰冗余逻辑设计 (37)5.6 本章小节 (38)第6章系统的可靠性分析 (39)6.1 系统调试流程 (39)6.2 调试内容及步骤 (40)6.3 系统运行效果 (41)6.4 本章小结 (41)总结 (42)致谢.............................................. 错误!未定义书签。
龙门刨床研究报告
总结报告专业:电力系统及其自动化班级:电力07-1 姓名:高宏娜学号: 0705040404 辽宁工程技术大学1.绪论传统的大型龙门刨床其调速系统采用直流发电机—电动机组拖动系统,靠改变直流发电机与直流电动机的磁通量来调节速度,控制系统采用分离元件,交流接触器、继电器等来控制电机组的起动以及刀架、横梁及工作台的换向、抬刀等动作。
这种控制系统故障环节较多,维修困难,调速系统占地面积大,噪音大,设备投资大,惯性大,调整系统动态及静态性能均不理想[1]。
我们采用一种新型全数字式大功率直流调速装置来进行调速,它采用了16位(或32位)微处理器及其它先进技术,使其具有很高的调速精度,优良的控制性能和较强的抗干扰能力,大大减少了故障环节,降低噪音,节约电能,提高可靠性等[2],且欧陆590全数字式直流调速系统采用16位微处理器,通过优化的闭环控制,实现直流他励电动机和永磁电动机的精确调速控制。
2全数字闭环直流调速系统的工作原理2.1概述该系统采用先进的网络数字技术,以串行通讯方式把所有指令器件、检测器件以及执行设备连接在一起。
系统还采用先进的数字式行程检测定位技术,淘汰了原来用行程开关检测刨台的行程及控制刨台换向的传统方式。
系统的主要控制环节是由三菱公司FXZN系列LPC、英国欧陆590数字化直流调速器(590+/38A0)和鞍山通用电气公司生产的龙门刨床AT59RH型汉字显示人机对话装置组成,并且由此构成《全数字龙门刨床控制系统》【3】。
2.2全数字化直流调速装置传动简介全数字化直流调速控制传动是指由三相交流电源直接供电,用于直流电机电枢和励磁供电,完成调速任务。
其中单象限工作装置的电枢整流回路为三相桥式全控电路;四象限工作装置的电枢整流回路为反并联三相桥式全控电路。
励磁整流回路采用单相半控桥,所有的控制、调节、监控及附加功能都由微处理器来实现,且全部控制过程在VLS(I极大规模集成电路)技术和微机化硬件环境下以程序软件实现,系统内部信息交换以数字方式进行。
基于PLC的龙门刨床工作台多段速控制系统设计
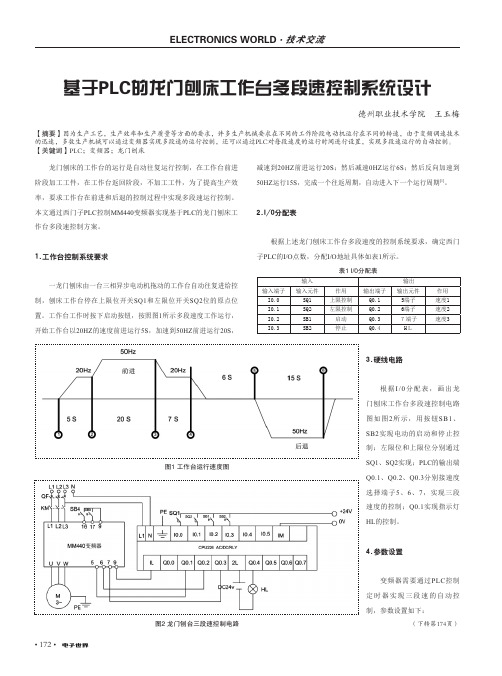
基于PLC的龙门刨床工作台多段速控制系统设计德州职业技术学院 王玉梅【摘要】因为生产工艺,生产效率和生产质量等方面的要求,许多生产机械要求在不同的工作阶段电动机运行在不同的转速,由于变频调速技术的迅速,多数生产机械可以通过变频器实现多段速的运行控制,还可以通过PLC对每段速度的运行时间进行设置,实现多段速运行的自动控制。
【关键词】PLC;变频器;龙门刨床龙门刨床的工作台的运行是自动往复运行控制,在工作台前进阶段加工工件,在工作台返回阶段,不加工工件,为了提高生产效率,要求工作台在前进和后退的控制过程中实现多段速运行控制。
本文通过西门子PLC 控制MM440变频器实现基于PLC 的龙门刨床工作台多段速控制方案。
1.工作台控制系统要求一龙门刨床由一台三相异步电动机拖动的工作台自动往复进给控制,刨床工作台停在上限位开关SQ1和左限位开关SQ2位的原点位置。
工作台工作时按下启动按钮,按照图1所示多段速度工作运行,开始工作台以20HZ 的速度前进运行5S ,加速到50HZ 前进运行20S ,减速到20HZ 前进运行20S ;然后减速0HZ 运行6S ;然后反向加速到50HZ 运行15S ,完成一个往返周期,自动进入下一个运行周期[1]。
2.I/0分配表根据上述龙门刨床工作台多段速度的控制系统要求,确定西门子PLC 的I/O 点数,分配I/O 地址具体如表1所示。
表1 I/0分配表输入输出输入端子输入元件作用输出端子输出元件作用I0.0SQ1上限控制Q0.15端子速度1I0.1SQ2左限控制Q0.26端子速度2I0.2SB1启动Q0.37端子速度3I0.3SB2停止Q0.4HL图1 工作台运行速度图图2 龙门刨台三段速控制电路3.硬线电路根据I /0分配表,画出龙门刨床工作台多段速控制电路图如图2所示,用按钮SB1、SB2实现电动的启动和停止控制;左限位和上限位分别通过SQ1、SQ2实现;PLC 的输出端Q0.1、Q0.2、Q0.3分别接速度选择端子5、6、7,实现三段速度的控制;Q0.1实现指示灯HL 的控制。
龙门刨床的PLC电气控制系统设计【毕业作品】
BI YE SHE JI(20 届)龙门刨床的PLC电气控制系统设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月-Ⅰ-摘要在分析和研究龙门刨床(B2012A)控制原理的基础上,根据生产工艺要求,设计了龙门刨床基于变频调速的PLC控制。
该系统以西门子公司的TD3000为主要调速控制器件,PLC选用西门子公司的S7-200系列的CPU224。
根据刨床的实际调速范围和负荷,选择了变频异步电动机、变频器和测量转速的编码器型号;绘制了电力拖动系统的主回路电路图、PLC和变频器的外部接线图。
并且,对变频器接口电路的设计方法和变频器参数的设置方法也做了详细说明。
刨床各个运动部件采用PLC逻辑控制,根据工艺要求可实现各部分的单独运动及联动。
用可编程控制器进行检测过零为转换条件,实现了工作台的无冲击换向。
以精密电位计为速度给定元件,可手动实时准确地调节主电机的转速,从根本上解决了龙门刨床换向冲击大、工作频率不高、耗电量大等缺点。
关键词:龙门刨床,变频器调速,PLC-Ⅰ-AbstractOn the basis of the analysis and research of the original control system of double housing planer (B2012A), according to the special requirements of production process, designed a system with a the inverter direct current speed control based on PLC control. The system chooses the Siemens TD3000 as the main speed control devices, and the PLC selected the Siemens S7-200 series CPU224.First, the dissertation introduces the hardware design of the control system. According to actual speed regulation range and loads of the original DC drive system, the model of variable frequency induction motor, inverter and encoder to measure the speed are chosen. It presents the main circuit schematics of electric drive system, and the external wire-connection diagrams of PLC and inverter. Furthermore, a description of the interface circuit design fashions and parameters setting of inverter are described.The system use the programmable controller, as to realize zero-speed examining and logical controlling, and the linkage of the motile parts can be achieved according to its process requirements. In this system , zero-speed reversing of the work platform and no impact of original system can be realized. Precise potentiometers are chosen as the speed regulation components in this system, it can regulate the Real-time rotational speed of the main electromotor accurately, and the disadvantages of the original system, such as the large reversing impact of planer, the inadequate operating frequency and too high power consumption, are hurdled in this system.Key words: planer, inverter, PLC-Ⅱ-目录摘要 (Ⅰ)ABSTRACT............................................................................................ . (Ⅱ)目录..................................................................................................... . (Ⅲ)第一章绪论........................................................................................ .. (1)1.1课题的目的和意义 (1)1.1.1本课题的目的 (1)1.1.2本课题的研究意义 (1)1.2龙门刨床电气控制的发展 (1)1.2.1龙门刨床电气控制的历史与现状 (1)1.2.2龙门刨床电气控制的发展 (3)1.3课题设计参数及主要内容 (3)第二章龙门刨床控制系统的设计方案..................................................... .. (5)2.1现有龙门刨床存在的问题 (5)2.2龙门刨床的结构特点 (5)2.3龙门刨床的工艺特点及技术要求 (6)2.4总体设计方案的确定 (9)第三章龙门刨床控制系统的硬件设计 (11)3.1系统逻辑控制程序设计的主要组成 (11)3.2电力拖动系统的主回路设计 (11)3.3PLC的选型及外部接线图 (13)3.3.1 PLC的特点 (13)3.3.2 PLC的选型 (14)3.3.3 PLC的外部接线图 (15)3.4变频装置的选型和硬件配置 (17)3.4.1 电机选型 (17)3.4.2 变频器选型 (17)3.4.3 变频器接口电路设计与参数设置 (19)3.4.4 编码器与PG速度卡选型 (21)3.5传感器的选型 (22)第四章 PLC逻辑控制程序设计 ................................................................ (24)4.1PLC逻辑控制程序设计方法概述 ................................................. (24)4.2工作台控制程序设计 (24)4.2.1工作台点动程序设计 (25)4.2.2工作台自动往返控制程序设计 (27)4.3辅助部分控制程序设计 (30)4.3.1 横梁升降逻辑控制程序设计 (30)4.3.2 刀架运动逻辑控制程序设计 (31)4.3.3 风机、油泵逻辑控制程序设计 (33)4.4 PLC若干技术的实现 (33)4.4.1 工作台无冲击换向技术的实现 (33)4.4.2 多件联动安全性与可靠性的实现 (33)4.4.3 工作台切削过载自动返回的实现 (34)结论..................................................................................................... (35)参考文献 (36)致谢 (37)附录系统PLC逻辑控制程序梯形图 (38)第一章绪论1.1 课题的目的和意义1.1.1 本课题的目的龙门刨床电气设备是一个复杂的工厂大型零件生产的关键设备之一,刨床电气传动自动控制对生产过程的控制系统有很高的要求,并且也在不断提高。
PLC改造B2012A型龙门刨床控制系统
PLC改造B2012A型龙门刨床控制系统1.改造意义本题的改造目标为利用可编程控制器及变频器实现对龙门刨床的自动控制和平滑调速,消除换向冲击,提高工作效率,减少噪声,取缔原控制系统,从而达到既经济又快捷地运行龙门刨床的目的.而使龙门刨床复杂的电气控制系统变的简单,清晰明了,使龙门刨床处于最佳的工作状态.龙门刨床如控制和使用得当,不仅能提高效率,节约成本,还可大大延长使用寿命.龙门刨床主要分为机械和电气控制两大组成部分,机械部分相对比较稳定,而使龙门刨床运行在最优状态主要取决于电气控制系统控制方式.在传统龙门刨床中,其机械部分刚性好,精度较高,一般其基本性能可达到现代同类机械的水平,但控制和驱动部分则显得不同程度的老化,对老式龙门刨床的改造有很大的实际意义.2.工艺要求本课题的工艺要求为:(1)取消电机扩大机、发电机,以减少噪声,克服诸多控制缺陷.(2)工作台能实现自动循环工作和点动,可实时精确调节工作台速度,平稳换向,并有自动和点动工作时的极限保护.(3)垂直刀架可方便地在水平和垂直两个方向快速移动和进刀,并能进行快速移动和自动进给的切换.(4)左右侧刀架可在上、下方向快速移动和进刀,能进行快移/自动切换.并有左右侧刀架限位开关,防止其向上移动时与横梁碰撞.(5)横梁可方便地上下移动和夹紧放松,加紧程度可调;横梁下降时有回升延时,延时时间可调.(6)润滑泵有连续/自动切换开关,系统一得电,油泵即上油,至一定压力时,油压继电器触点闭合,为工作台工作做准备.(7)有保护环节控制,保证工作台停在后退末了,以免切削过程中发生故障而突然停车造成刀具损坏和影响加工工件表面的光洁度.(8)各回路均有自动空气断路器作短路保护和过载保护.3.工作原理B2012A型龙门刨床接触器--继电器控制电路原理:(1)主拖动机组的启动和停止按主拖动机组的启动按钮SB2后,接触器KM1和KMY吸上.时间继电器KT2线圈得电,经延时它的触点动作.接触器KM1的常开触点(703-705)闭合,实现自保.同时KMY 的常闭触点(702-706)断开KM2与KM△线圈通路,接触器KMY在主拖动机组定子侧的三个常开触点闭合,使主拖动机组接成Y并启动.随着主拖动机组的启动,发电机G和励磁机GE也被拖动运转.当GE输出电压达到正常数值时,直流时间继电器KT1吸上,它的断电延时闭合的常闭触点(705-717)打开,断电延时打开的常开触点(723-725)闭合.由于时间继电器KT2延时时间尚未结束,它的触点(705-717)尚未断开,所以尽管KT1的触点(705-717)已打开,接触器KMY扔维持吸上状态,主拖动机组扔按星形连接运行.当时间继电器KT2的延时结束时,它的通电延时断开的常闭触点(705-717)断开,接触器KMY断电释放,同时KT2的通电延时闭合的常开触点(705-723)和已经闭合的KT1的触点(723-725)共同使接触器KM2通电吸上.KM2有两个常开触点闭合,一个实现自保(705-725),另一个(717-721)为接触器KM△通电做好准备.KM2的两个常闭触点断开,一个(717-719)使KMY彻底失电,另一个KM2的常闭触点(31-51)使KT1线圈失电,在这里KT1是负责Y与△切换的间隔时间,经过整定延时后,KT1的触点(705-717)闭合,触点(723-725)打开.这时KM△线圈得电吸合,KM△在主拖动机组定子侧的三个常开触点闭合,使主拖动机组被连接成三角形运转,同时KM△的常闭触点(702-704)断开KT2与KMY的线圈通路,到此主拖动机组启动完毕.当按下主拖动机组的停止按钮SB1时,接触器KM1、KM△和KM2均断电释放,主拖动机组的电源被切断机床停止工作.(2)工作台的“步进”、“步退”当主拖动机组启动完毕后,接触器KM△的常开触点(101-103)闭合,按工作台“步进”按钮SB8,继电器KA3通电吸合,KA3的常开触点(1-3)闭合,断电延时继电器KT3吸合,KT3的延时闭合的常闭触点(41-270)与(280-281)断开,断开了电机放大机的欠补偿回路和发电机的自消磁回路,同时KT3的延时断开的常开触点(1-201)与(2-204)闭合,使电机放大机控制绕组WC3中加入给定电压。
运动控制系统课程设计——龙门刨床电气控制系统设计
运动控制系统课程设计学院:专业班级:学号姓名:目录第一章课程设计任务及要求 (1)1.1 设计目的 (1)1.2 设计内容 (1)1.3 设计题目及要求 (1)第二章龙门刨床电气控制系统设计方案论述 (3)2.1 引言 (3)2.2 直流电动机调速方法 (3)2.3 开环直流调速系统 (4)2.4 开环直流调速系统 (4)2.5 直流双闭环调速系统 (5)2.5.1 系统静特性 (6)2.5.2 系统动态特性 (7)2.5.3 模拟式双闭环直流调速系统 (9)2.5.4 数字式双闭环直流调速系统 (9)2.5.5 数模混合控制系统 (10)第三章直流双闭环调速系统设计 (12)3.1 系统总体概述 (12)3.2主电路设计 (14)3.2.1整流变压器的选择 (15)3.2.2整流电路晶闸管的选择 (16)3.2.3整流晶闸管的保护 (16)3.2.4电流互感器的选择 (17)3.2.5平波电抗器的选择 (17)3.2.6其他保护电路选择及其作用 (17)3.3 速度环和电流环设计 (18)3.3.1 直流双闭环系统设计方法 (18)3.3.2 电流调节器的设计 (21)3.3.3 速度调节器的设计 (23)3.4 系统其他功能单元分析 (25)3.4.1 给定单元GJ (25)3.4.2 逻辑控制器DLC (26)3.4.3 零电流检测单元DPT和转矩极性单元DPZ (26)3.4.4 零速封锁单元DZS (26)3.4.5 反号器AR (26)3.4.6 电流变换及电流反馈BC (26)3.4.7 晶闸管触发单元CT和脉冲放大电路MT三相移相触发器 (27)第四章系统实验调试 (28)4.1 系统实验调试概述 (28)4.2 触发器的整定 (29)4.3 系统的开环运行及特性测试 (29)4.4 系统各单元的调试 (30)第五章总结与展望 (33)5.1 调试心得体会 (33)5.2 设计调试结论 (34)5.3 电力拖动自动控制系统展望 (34)附录 (35)附录一:各种整流电路的失控时间 (35)附录二:龙门刨床双闭环直流调速系统原理图 (35)参考文献 (36)第一章课程设计任务及要求1.1 设计目的运动控制系统是自动化专业的主干专业课,具有很强的系统性、实践性和工程背景,运动控制系统课程设计的目的在于培养学生综合运用运动控制系统的知识和理论分析解决运动控制系统设计问题,使学生建立正确的设计思想,掌握工程设计的一般程序、规范和方法,提高学生调查研究、查阅文献及正确使用技术资料、标准、手册等工具书的能力,理解分析、制定设计方案的能力,设计计算和绘图能力,实验研究及系统调试能力,编写设计说明书的能力。
PLC和直流驱动控制的龙门刨控制系统改造
PLC和直流驱动控制的龙门刨控制系统改造随着现代材料和控制技术的发展,龙门刨床的实时控制有了许多技术改进。
文章主要研究龙门刨控制系统的改造,利用PLC控制调速系统对龙门刨控制系统进行改造,最后通过实际应用验证,龙门刨控制系统控制功能得到了增强,同时整个龙门刨系统的可靠性和稳定性有了很大的提高。
标签:直流调速;PLC;龙门刨1 引言龙门刨床是用途比较广泛的一种大型关键设备。
龙门刨的工作特点是将工件放在刨台上,刨刀在刨台上对工件进行来回的的刨削,此时刨台在做频率很高的往复运动。
一般情况下刨台的运动可以设置为两种:人工点动运行模式和自动往复循环运行模式。
龙门刨其控制系统动作频繁,导致工作台工作故障,维修工作量大,影响生产;因此存在着耗能高、精度低、控制线路复杂、故障率高、稳定性差等一系列问题。
为解决以上问题,我们做出以PLC为核心,采用全数字式直流驱动器,利用它为调速单元的直流调速控制方案,对龙门刨床的电控系统进行了具有针对性的改造和修缮。
2 系统改造可行分析龙门刨床运动可分为:主运动形式、进给运动及辅助运动形式。
主运动:龙门刨床工作台始终是进行重复往返运动;进给运动:通常是指刨床左右刀架的进给;辅助运动:主要是为了调整刀具,如横梁的夹紧、放松,横梁的上、下移动等。
龙门刨床刨床前进时为工作行程,此时带动工作台的电机有负载。
龙门刨床后退时为返回行程,返回过程刀具抬起,电机为空载。
改变电动机电枢电压的大小和方向,就改变了刨台的运行速度和方向。
进行机床改造的总体设计时,需要考虑到控制系统和驱动系统的协调。
本机床的动作控制绝大部分属于逻辑控制,因此选择可编程序控制器(PLC)来完成机床的动作控制,可使各电机的运行,各刀架的移动、抬刀、横梁夹紧等,主传动电磁制动器的动作实现程序控制。
针对老式交磁扩大机组和老式可控硅组件龙门刨床的改造,采用了最新的控制技术和电机驱动系统,具有节电、降噪、控制逻辑灵活、换向平稳、使用可靠等特点,大大提高了设备自身的实用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙门刨床速度控制系统综述
摘要:当负载变化时,利用速度反馈对刨床速度进行自动控制,使速度快速稳定在一定值。通过求系统的闭环函数,
得出系统的阶跃响应,从而得到系统的稳定性。
关键词:降阶 传递函数 时域分析 根轨迹
一、 系统介绍
刨床系指用刨刀加工工件表面的机床。刀具与工件做相对直线运动进行加工,主要用于各种平面与沟槽加工,
也可用于直线成形面的加工。即用刨刀对工件的平面、沟槽或成形表面进行刨削的直线运动机床。按其结构可分为
以下类型:
(1) 悬臂刨床
(2) 龙门刨床
(3) 牛头刨床
(4) 插床(立刨床)
龙门刨床因有一个由顶梁和立柱组成的龙门式框架结构而得名,工作台带着工件通过龙门框架作直线往复运
动,多用于加工大平面(尤其是长而窄的平面),也用来加工沟槽或同时加工数个中小零件的平面。龙门刨床的主
运动是工作台的直线往复运动,而进给运动则是刨刀的横向或垂直间歇运动。龙门刨床由直流电机带动,并可进行
无级调速,运动平稳。龙门刨床的所有刀架在水平和垂直方向都可平动。
在这里,我们主要研究龙门刨床的速度控制系统。在工业控制中,龙门刨床速度控制系统是按照反馈控制原理
进行工作的。通常,当龙门刨床加工表面不平整的毛坯时,负载会有很大的波动,但为了保证加工精度和表面光洁
度,一般不允许刨床速度变化过大,因此必须对速度进行控制。
图1是利用速度反馈对刨床速度进行自动控制的原理示意图。在图1中,刨床主电动机SM是电枢控制的直流
电动机,其电枢电压由晶闸管整流装置KZ提供,并通过调节触发器CF的控制电压uk,来改变电动机的电枢电压,
从而改变电动机的速度(被控量)。测速发电机TG是测量元件,用来测量刨床速度并给出与速度成正比的电压uo。
然后,将uo反馈到输入端并与给定电压ui反向串联便得到偏差电压△u= ui-uo。ui是根据刨床工作情况预先设置的
速度给定电压,它与反馈电压uo相减便形成偏差电压,因此uo称为负反馈电压。一般,偏差电压比较微弱,需经
放大器FD放大后才能作为触发器的控制电压。
图1 龙门刨床速度控制系统原理图
-
-K
TG
SM
+
-
+
-
ui
uo
uk ua
+ FD CF KZ
二、 系统分解
在这个系统中,如图2,被控对象是电动机,触发器和整流装置起了执行控制动作的作用,故称为执
行元件。当刨床正常工作时,对于某给定电压ui,电动机必有确定的速度给定值n相对应,同时亦有相应的
测速发电机电压uo,以及相应的偏差电压△u和触发器控制电压uk。如果刨床负载变化,如增加负载,将使
速度降低而偏离给定值,同时,测速发电机电压uo将相应减小,偏差电压△u将因此增大,触发器控制电
压uk也随之增大,从而使晶闸管整流电压ua升高,逐步使速度回升到给定值附近。反之,如果刨床速度因
减小负载致使速度上升,则各电压量反向变化,速度回落过程完全一样。另外,如果调整给定电压uo,便
可改变刨床工作速度。因此,采用龙门刨床速度控制系统,既可以在不同负载下自动维持刨床速度不变,
也可以根据需要自动地改变刨床速度。
图2 龙门刨床速度控制系统方框图
图3 龙门刨床速度控制系统结构图
Ka
Cm
Uo(s)
-
-
Ui(s)
比较电路 放大器 触发器 晶闸管 电动机
测速发电机
ui uk △u ua n
-
Uo
三、传递函数及系统降阶
系统的开环传递函数为:
式中,La和Ra分别为电动机电枢绕组的电感和电阻;Cm为电动机的转矩系数;Ce为与电动机反电势有关的比例系
数; Ka为放大器增益;J和f分别为折算到电动机轴上的总转动惯量和总粘性摩擦系数。如果略去电枢电感La,
且令
,
其中,K1称为增益;F称为阻尼系数。那么不考虑负载力矩的情况下,系统的开环传递函数可以简化为
其中,K=K1/F,称为开环增益;Tm=J/F,称为机电时间常数。相应的闭环传递函数是
四、时域分析
取
电动机的转矩系数Cm=100
电动机反电势有关的比例系数Ce=0.9
电动机电枢绕组的电阻Ra=1
电动机电枢绕组的电感La=1
电动机轴上的总转动惯量J=5
总粘性摩擦系数f=10
放大器增益Ka=20
则 Ka
=100
K=K1/F=Ka
Tm=J/F=0.05
则系统的开环传递函数为
系统的闭环传递函数为
闭环特征方程
用劳斯判据判定,当K0时,系统稳定。
自然频率
阻尼比
超调量
调节时间ts=
Ka=20时, 超调量 调节时间ts=0.35
系统的闭环传递函数为
012345678910
-2
0
2
4
6
8
10
Time[sec]t
u
(
t
)
单位脉冲响应曲线
012345678910
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time[sec]t
u
(
t
)
单位阶跃响应曲线
峰值时间
延迟时间
00.511.522.533.544.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Time[sec]t
u
(
t
)
单位阶跃响应曲线
延迟时间=0.1s
上升时间=0.2s
峰值时间=0.2s
调节时间=0.35s
超调量 =
系统为型系统,在阶跃输入的情况下,稳态误差为0
系统优化使超调量,调节时间ts
取Ka=10时, 超调量 调节时间ts=0.175
系统的闭环传递函数为
上升时间
调节时间
超
调
量
012345678910
-1
0
1
2
3
4
5
6
7
Time[sec]t
u
(
t
)
单位脉冲响应曲线
012345678910
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Time[sec]t
u
(
t
)
单位阶跃响应曲线
\
延迟时间
峰值时间
00.511.52
0.75
0.8
0.85
0.9
0.95
1
1.05
Time[sec]t
u
(
t
)
单位阶跃响应曲线
延迟时间-0.1s
上升时间=0.2s
峰值时间=0.35s
调节时间=0.175s
超调量 =
系统为型系统,在阶跃输入的情况下,稳态误差为0
五、绘根轨迹
在未降阶的情况下,
系统的开环传递函数为:
1、 开环零点:m=0
超
调
量
上升时间
开环极点:n=3 P1=0 P2=-1+4.12j P3=-1-4.12j
2、 根轨迹条数:max(m,n)=3
3、 渐近线条数:n-m=3
渐近线与实轴的交点:
渐近线与实轴的交角:
𝝍=
4、 实轴上的根轨迹:(-]
5、 分离点:无
6、起始角:=𝛑=346 k=0
=𝛑=14 k=0
7、根轨迹与虚轴的交点:
闭环特征传递函数:D(s)==0
令s=jw,代入闭环特征传递函数D(s) =0,得w=,
则根轨迹与虚轴的交点为
画出根轨迹图
-30-25-20-15-10-5051015
-25
-20
-15
-10
-5
0
5
10
15
20
25
系统闭环传递函数根轨迹
Real Axis (seconds-1)
I
m
a
g
i
n
a
r
y
A
x
i
s
(
s
e
c
o
n
d
s
-
1
)
Ka=1.8是系统临界稳定增益,所以系统开环增益在(1.8,)范围内稳定,Ka=10时系统稳定。当Ka=20时,超调
量降低,调节时间减少,系统稳定性明显提高。