十点电动自动调平系统的设计与研究
4点支撑伺服平台自动调平机理研究

象 。根 据 课 题 的 实 际 需 要 , 合 各 项 性 能 要 求 , 系 统 综 本
选 用 4点 支 撑 方 案 , 台 的 4 个 支 撑 点 如 图 2所 示 。 平
是 以最 高 / 点 为 基 准 点 , 过 调 整 其 余 支 撑 腿 来 使 余 低 通 下 各点 的 高度 与基 准点 平齐 。 集倾 角 传感 器 的信 号 , 采
4 点 支 撑 伺 服 平 台 自 动 调 平 机 理 研 究
口 谢志江 ・ 口 高 健
重庆
口
刘小波
重庆 403 000
口
倪
卫
1 重 庆 大 学 机 械 传 动 国家 重 点 实 验 室 .
2 重 庆 电子 工 程 职 业 学 院 .
4 13 031
9 3 中 国工 程 物 理研 究 院 激 光 聚 变研 究 中心 四川 绵 阳 621 00 .
U i ,L n t RU ) 这 些 L 。 RU 的 安 装 、 卸 、 换 [是 由 专 门 拆 替 2 3
的 装 校 设 备 来 实 现 的 。 实 际 应 用 中 发 现 , 装 校 设 备 作 业 时 , 水 平 度 对 于 装 校 效 率 、 度 及 设 备 安 全 有 重 要 其 精
摘
要 : 光 Ⅲ 主机 装 置 L U装 校 设 备 工作 时 需调 平 。 调 平 过 程 需保 证 L U 的 几何 中心位 置基 本 不 变 。为此 专 门 神 R 且 R
设 计 了一 种 4点 支撑 伺 服 平 台 的 自动 调 平 系统 。 绍 了 系统 的 硬 件 组 成 和 调 平 策 略 。 重 点 分 析 了 平 台 的 调 平 机 理 。 介 引入
2 结 束 语
耕深自动测量方法分析——基于具有车身调平功能的山地拖拉机

农业工程学现代农业科技2020年第13期图1后悬挂机构示意注:1为左提升油缸;2为左倾角传感器;3为右倾角传感器;4为右提升油缸;A 为拖拉机左下铰接点;B 为左上提升点;C 为右上提升点;D 为右下铰接点;E 为上铰接点;F 为上悬挂点;G 为左下悬挂点;H 为右下悬挂点;AG 为左下拉杆;DH 为右下拉杆;EF 为上拉杆。
摘要通过对丘陵山地拖拉机车身调平模式和后悬挂机具横向调平模式的研究和分析,以及在研究了现有耕深自动测量方法的基础上,通过理论分析和计算,本文提出一种基于具有车身调平功能的丘陵山地拖拉机的耕深自动测量方法。
丘陵山地拖拉机车身调平模式分为单侧作用和双侧作用2种形式;后悬挂机具横向调平模式也分为单侧作用和双侧作用2种形式,进行搭配组合得到4种组合工作模式。
针对这4种工作模式,通过对事先在水平作业面内标定好的耕深测量公式分别进行零点修正和等效角度选用,共得到8组最终的测量公式。
不仅能够满足水平作业面内的测量要求,而且还能在坡地等高作业时,后悬挂机具的横向角度调整后,通过实时采集传感器的信号即可获得实际耕深,实现耕深的自动测量。
关键词耕深;自动测量;车身调平;悬挂调平;山地拖拉机中图分类号TP273;S219.85文献标识码A 文章编号1007-5739(2020)13-0154-03开放科学(资源服务)标识码(OSID )耕深自动测量方法分析———基于具有车身调平功能的山地拖拉机杨少奇李广宇*徐峰张磊孟长伊杨海天于澎涛李玲玲(吉林省农业机械研究院,吉林长春130022)丘陵山区地况复杂多变,地面高低起伏不定。
研发具有车身调平功能的丘陵山地拖拉机,不仅能确保驾驶员的人身安全和操作舒适,而且能够提高拖拉机在山地作业的稳定性和通过性,与之配套的后悬挂系统对拖拉机车身调平、悬挂机具调平,以及实现山地拖拉机后悬挂机具对坡地的仿形作业起着至关重要的连接作用[1]。
利用控制器、传感器和智能控制算法等先进仪器和技术的电控液压悬挂系统是山地拖拉机后悬挂系统发展的最佳方案[2-5]。
某四点支撑液压自动调平系统设计

三 、硬 件 设 计
在硬件 设计上 ,选用 PLC作为核 心控制 单元 、人 机接 口 单元 ,通过 外部 液压 马达 驱动单 元 、液位传 感器 单元 和 车载
四 、软 件 设 计
系统 软件 设计 采 用 STEP7一Micro/WIN32编 程语 言 ,程 序 主要 由程序初始化 、数据采 集传感器 、手 动调 平 、自动调平 、 自动退 L叶|,操 作 面板 通讯 等组 成 。当通上 电后 ,系统 会 自动 进 行 自检初 始 化程序 运行 ,当 自检无 故 障 时 ,系统 就会 读 取 操 作面板 中通讯 子程序 的操 作指令 ,此时机械撑 腿如果需 要 手动 调平 ,系统 会调 用手 动调 平子 程 序 ,手 动进 行每 个腿 的 升降 指令 执行 。如果 系统 需要 自动 调平 的 指令 ,通过 调整 程 序 的 自动调整 完成 整个 过程 ,当 凋平过 程 完成后 ,按 下关 闭 按钮 自动 退 出操作 面板 ,将 自动退 m调 用 子程序 ,系 统 自动 收 回所 有 的机 械 腿 。
Байду номын сангаас
二 、液压 系统设计
雷达 车使用 的液 压系统 采用 通常 车载液 压站进 行 ,车 载 液压 站 主要为 动力 源 、控 制 阀站 、调 平腿 和液压 管路 组成 。 该 系统 由交 流伺服 电机 和液压 泵供 电 。通 过对相 关液 压 阀的 控制进行 T作调整 ” ,液压 油通过液压管路将油 传给液压马达 , 液 压马达 带动 调平 腿实 现车辆 的调 平功 能。雷达 车使 用 的液 压泵 采用 派克 高压齿 轮泵 ,利用 PLC系统控 制伺服 电机 的转 速 进而 可 以控制泵 中液 体输 出流 量 ,最终 完成 机械 腿调平 的 调 整 。雷达车 中液 压 系统的最 大压 力 由溢流 阀控制 ,以防止 系统 失效 。
平台机械调平系统的结构与设计_田魁岳

工程机械
De s ign a nd Ca lcula tion
项目
表 3 试验结果 技术要求
设 计
测量结果
顺时针和逆时针各运转 1 h, 运转应平稳、无冲击和异常响声, 各螺栓不得松动, 结 无 冲 击 和 异 常 响 声 , 结 合
计
空载性能 合面不得漏油。
面未漏油
算
噪声
≤85 dB( A)
83.2 dB( A)
d0 =0.16 m, 螺 旋 升 角 !=3.64°, 当 量 摩 擦 角 "′=
计
· !
( 1) 支撑系统工作时, 控制信号驱动伺服电机, 0.14°)
计
控制信号的大小决定电机的转速, 负载的大小决定
T1=F( d0/2) tan( λ+ρ′) =792.83 N·m
算
电机的转矩。伺服电机在不高于额定转矩的工况下,
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"
关键词: 平台 支腿 精密调平 结构 设计
在工程车辆、起重运输机械和建筑机械等设备 工作过程中, 广泛用到液压支腿进行支撑和调平, 对 于调平要求较高的车辆或平台, 往往采用液压伺服 系统进行控制, 它的缺点是液压系统要一直处于工 作状态, 即使采用液压锁也不能保证平台较长时间 处于高精度位置参数要求的稳定状态。本文介绍了 一种车载平台机械调平系统, 利用其对车辆或平台 进行精确调平, 比常用的液压调平系统具有更明显
正交锥齿轮传动效率
η3=88%
圆柱蜗杆驱动转矩
片或埋入) , 在调平过程中随时把负荷信号传递给控 制系统。
T0=T/iη1η2η3=19.08 N·m 4.3 支撑系统(滚珠螺旋丝杠)强度与刚度计算( 设
基于PLC控制的大载荷四点支撑液压自动调平系统
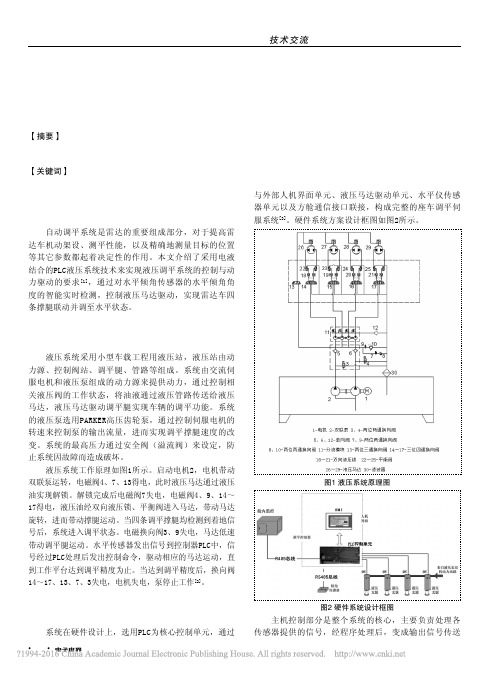
• 158 •基于PLC控制的大载荷四点支撑液压自动调平系统设计安徽博微长安电子有限公司 席广辉 王 峰 皇淼淼 陶 烨【摘要】液压自动调平系统的驱动力大,负载能力强,结构紧凑,适合在重型移动载体上运用。
采用液压马达(带制动器、霍尔传感器)以及双向液压锁能使液压系统得到较高的锁紧精度,同时采用四点支撑结构,抗倾覆能力强,系统操作简单、使用方便,调平速度快,能有效提高车载平台的机动性。
【关键词】自动调平;PLC;液压1 引言自动调平系统是雷达的重要组成部分,对于提高雷达车机动架设、测平性能,以及精确地测量目标的位置等其它参数都起着决定性的作用。
本文介绍了采用电液结合的PLC液压系统技术来实现液压调平系统的控制与动力驱动的要求[1],通过对水平倾角传感器的水平倾角角度的智能实时检测,控制液压马达驱动,实现雷达车四条撑腿联动并调至水平状态。
2 液压系统设计液压系统采用小型车载工程用液压站,液压站由动力源、控制阀站、调平腿、管路等组成。
系统由交流伺服电机和液压泵组成的动力源来提供动力,通过控制相关液压阀的工作状态,将油液通过液压管路传送给液压马达,液压马达驱动调平腿实现车辆的调平功能。
系统的液压泵选用PARKER高压齿轮泵,通过控制伺服电机的转速来控制泵的输出流量,进而实现调平撑腿速度的改变。
系统的最高压力通过安全阀(溢流阀)来设定,防止系统因故障而造成破坏。
液压系统工作原理如图1所示。
启动电机2,电机带动双联泵运转,电磁阀4、7、13得电,此时液压马达通过液压油实现解锁。
解锁完成后电磁阀7失电,电磁阀4、9、14~17得电,液压油经双向液压锁、平衡阀进入马达,带动马达旋转,进而带动撑腿运动。
当四条调平撑腿均检测到着地信号后,系统进入调平状态。
电磁换向阀3、9失电,马达低速带动调平腿运动。
水平传感器发出信号到控制器PLC中,信号经过PLC处理后发出控制命令,驱动相应的马达运动,直到工作平台达到调平精度为止。
机电一体化专科毕业论文题目

机电一体化专科毕业论文题目随着科学技术向生产力逐步转化,机电一体化产品的设计已经涉及到机械、电气和控制等众多领域。
单领域、分散建模的设计方法已经很难满足产品综合设计的要求。
以下是我们整理的机电一体化专科毕业论文题目,希望对你有所帮助。
机电一体化专科毕业论文题目一:1、基于虚拟原型的机电一体化建模与仿真技术研究2、基于实验教学的机电一体化系统探析3、MEMS加速度计与读出电路的研究4、基于LM628的运动控制器的研制5、机电一体化的物流培训模型-机械手搬运系统模块的设计6、国家骨干高职院校兼职教师现状与对策研究7、立体仓库实训系统信息管理的研究设计8、机电一体化精确定位装置及其控制系统的研究9、空间机械臂机电一体化关节的设计与控制10、基于SolidWorks&LabVIEW的虚拟原型机电一体化设计技术研究11、机电一体化新型旋转式海流计设计与开发12、橡塑工业循环温控技术机电一体化的设计与研究13、人民币防伪鉴真机电一体化设计实验研究14、高职机电一体化专业项目驱动课程体系研究15、基于UGNX的机械臂式三维扫描仪概念设计的研究16、桥塔检测机系统动力学稳定性能仿真与研究17、冲床自动送料机同步控制研究18、新型压力反馈氮爆式机电一体化液压碎石冲击器系统研究19、磁悬浮精密定位工作台机电一体化CAD/CAE集成研究20、机电一体化系统集成的研究与研制21、光束稳定与振动控制的光机电一体化系统研究22、基于资源配置的武汉光谷产业集群发展研究23、机电一体化产品虚拟样机协同建模与仿真技术研究24、振动环境下光束指向稳定及其光机电一体化关键技术25、机电系统虚实一体化的创新设计自动化理论与技术研究26、机电一体化系统方案生成及优选研究27、伺服电机驱动的机电及机电液一体化压力机研究28、五年制高职机电一体化专业物理课程内容设置研究29、新型开关磁阻平面电机的建模及控制30、带电清扫机器人液压自动调平系统的设计与研究31、片式电容装配联动机开发及质量检测的研究与实现32、高职院校机电专业实践教学评价体系构建33、机电一体化技术在工程质量与健康远程监控中的应用研究34、基于数控冲床母线槽机电一体化生产系统的控制研究35、机电一体化特技运动模型对电影影像真实感营造研究机电一体化专科毕业论文题目二:36、基于虚拟原型的机电一体化设计技术研究37、LED关键应用技术研究38、全自动脱胶机传动与控制系统研究39、基于工学结合的高职教育实践教学研究40、莱鲍迪甙A精制的多级结晶耦合技术及系统研究41、基于三维实体模型的PLC程序调试系统研究42、机电一体化实训装置在中职教学中的应用研究43、高职院校学生职业能力培养研究44、玻璃上片台翻转机构的计算机辅助优化设计45、机电一体化灵巧舵机控制系统设计46、基于PLC的光机电一体化实训系统设计47、具有可调摆幅输出的非圆齿轮轮系设计与应用研究48、管道全位置自动焊机的机电一体化设计及焊接工艺研究49、全自动气门芯装配系统的研究与开发50、黄石高新技术产业开发区产业发展战略及其支撑体系研究51、教学型移动机器人嵌入式控制开发平台设计52、DGT-1自动测斜仪的研究开发53、基于广义键合图法的机电一体化产品集成设计研究54、机电一体化粉体精密计量装置及控制系统的研究55、网络化电子多臂剑杆织机控制系统的研制56、现代机械系统的构成及其控制方法研究-在组合模型上的应用57、汽车智能刹车系统的概念设计方法研究58、电动切卡机的创新设计及仿真优化59、嵌入式操作系统在机电一体化设备控制过程中的应用60、机电一体化技术在高精度称重系统中的应用研究61、基于μC/OS-Ⅱ的嵌入式开发平台的构建及其在监控器中的应用62、虚拟样机技术在磁悬浮精密定位平台中的机电一体化研究63、液压挖掘机功率控制节能技术研究64、南通市光机电一体化产业发展战略研究65、基于模糊控制算法的装载机电子定位系统研究与开发66、数控高效滚齿机YKX3140的设计开发67、高分子材料用剪切仪Ⅱ型机械结构及温控系统研究68、基于PROFIBUS总线技术的柔性制造培训系统研究69、液压挖掘机器人轨迹跟踪综合控制策略方案研究70、包头轻工职业技术学院机电一体化技术专业课程改革研究机电一体化专科毕业论文题目三:71、SRM控制系统混合仿真技术的研究72、实时PCR仪光电检测系统的开发73、自适应环境温度变化的机电一体化温度仪表的研制74、中职生就业现状调查与对策研究75、羽绒自动填料设备的研究与开发76、数控激光加工教学实验设备的研究77、面向机电专业的DSP开放式教学实验系统的研究78、生物机电一体化假肢手的仿真系统79、机电一体化的液压冲击器控制系统研究80、超高压带电作业机器人清扫装置优化设计与研究81、机电一体化系统的联合仿真技术研究82、轿车前后保险杠超声波焊接设备的研究83、某机电一体化执行元件控制及特性分析84、计量泵机电一体化控制系统的研制。
基于三点调平的农田激光清平机设计与研究

和 轮距 , 高清 平机 前 后 及 左 右稳 定性 。 由于 清平 机 提
21 0 1年 3月
农 机 化 研 究
第 3期
的重 心较低 , 作 ຫໍສະໝຸດ 程 受 到 的 冲 击 力 相 对 较 小 , 以 工 所
三 点独 立悬 挂 调 平 可 以保 证 清 平 机 有 足 够 的稳 定 性 和抗倾 覆 能力 , 而且 结构 简单 、 本 低 、 制 算 法 容 易 成 控
工作 平 台平面沿 着 以另外 两个 调 平点 的连 线 为 中心 轴
1 永 磁 同步 调 整 电机 .
2调整丝杠组件 .
3 四连 杆 支 架 .
4 转 向驱 动 万 向节 .
5 后行走轮 .
6 机 架 .
图 4 后轮电机控 制偏移摆 动升降机构
F g 4 S r cu e o e rwh e fs ts n r me b y b t rc n rl i . t t r fr a e lo e wi g fa o y moo o t u d o
主要部件为 电机控制偏移摆动升降架 。
2 1 三点 独立悬挂 调 平模 型 .
脱 离基 准平 面 的距离 ; 时通 过一 倾 角传 感 器 检测 清 同
平 机前后 以及 横切 方 向 的倾 斜 角 度 , 断 倾 角误 差 范 判
收 稿 E期 :2 1 0 2 t 0 0— 4— 8 基 金 项 目 :国 家 创 新 基 金 项 目 (6 2 2 3 0 1 ) 0 C 6 1 0 7 6 1 作 者 简 介 : 胡 春辉 ( 9 3一), , 北 保 定 人 , 士研 究 生 , E—n l 18 男 河 硕 ( mi )
射接 收 系统 、 台倾 角 传 感 器 、 平 三点 独 立 悬 挂 调 平 系 统 、 削刀辊 、 架 和控 制 系 统 等组 成 。经 试 验 验 证 , 铣 机 该清 平 机可 以大 幅度 地 提 高土 地 平 整精 度 , 降低 工 人
地面找平机器人整平机构优化设计研究共3篇

地面找平机器人整平机构优化设计研究共3篇地面找平机器人整平机构优化设计研究1地面找平机器人是一种用于工业、建筑或农业等领域的机器人,其任务是将地面或其他表面进行找平,以满足地面平整度的要求。
其中整平机构是机器人的核心部分,对整个机器人的性能和效率有着至关重要的作用。
本文将探讨地面找平机器人整平机构的优化设计研究。
一、现有地面找平机器人整平机构的局限性当前地面找平机器人整平机构存在一些不足之处,主要包括以下几个方面:1、整平机构不够灵活:现有整平机构多采用传统的基于电机驱动的转子结构,其整平效果受到了机器人自身体积和形状的限制,适用范围受到了限制。
2、车轮设计不够合理:地面找平机器人的整体结构中,车轮是很重要的部分,但现有车轮设计多存在抓地力不足、阻力大等问题,影响了整体运动效率和精度。
3、整平效果不够精准:地面找平机器人整平机构还存在整平效果不够精准的问题,这可能导致地面找平的效果不理想,需要进行多次找平,增加了时间和成本的浪费。
二、地面找平机器人的整平机构优化设计为解决上述问题,需要对地面找平机器人整平机构进行优化设计:1、采用柔性结构设计:新一代地面找平机器人整平机构可以采用柔性结构设计,如采用曲线机械臂和柔性链条等设计,这样的结构不仅可以实现更高的灵活性和运动范围,而且有效降低了机器人的体积和重量,使机器人更容易在狭小空间内工作。
2、车轮设计优化:在车轮的设计中考虑采用非接触的方案,如采用磁悬浮结构、气垫结构等,这样可以降低车辆磨损,提高车辆抗震性能和防抖性能,以及提高车辆的行驶速度和精度。
3、整平机构精准度提升:通过升级精细度控制系统、加强控制算法的优化等方式,可以提高整平机构的整平精度和准确性,从根本上解决整平效果不理想和多次找平的问题,提高整个地面找平机器人的工作效率和成本控制能力。
三、总结本文探讨了地面找平机器人整平机构的优化设计研究,分析了现有整平机构存在的局限性,提出了新一代地面找平机器人整平机构的优化设计方案,从柔性结构设计、车轮设计和整平机构精准度提升等方面提出有效措施,以期能够提高地面找平机器人的整体性能和运作效率,为实际应用提供更好地支持和帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
快 速 、平 稳 、精 确 的 自动 调平 。
3 系 统 的 特 点
撑腿不 受力 而处 于悬空状 态 ,即产生 虚腿 现象 ,此种情 况 多点支 撑调平 将失去 实 际意义 。
我 公 司根据多 年研 制机 电式 调平 系统 的基础 ,对 多点 调平系 统进行 深入研究 ,运用先 进 的计 算机 技术 、传感 技术和 控制理 论 ,对 多点 电动 自动 调平 系统的调 平算 法 、触 地重 力 检测 、结构 工艺上 进行创 新性 研究 ,成功地 实现 多点 电动 自动调 平技术 上 的突破 ,将该 系 统 研制成 具有 自动化 程度 高 、举 升重 量大 、受 力分 布均 匀可 调控 、电动支 撑执行 机 构触地 快 速可靠 、调平 时 间短 、水 平稳定 性好 、调平 精度 高 .安全保 护措施 完善 、架设 撤 收方便 可 靠 、便 于维 护 、系统信 息可 视等特点 的系统 。
( 多六 点 )液压 调平 技术 ,由于液压 系统 体 积重量 大 、易产 生泄漏 、水平 稳定 度 差 、环 最 境适 应性 差 、使用 维护 困难 等 因素 ,在 移 动装备 上 的应 用效 果 始终 不理 想 。 因此 ,多点 、
电动 、大 负荷载 车 ( 平台 )调 平技术 是 当前 国、 内外 车 载武器领 域普遍 关注 的焦点 。 对于体 积大 、载荷 重 ,抗 倾覆性 能要求 高 的设备 ,必 须采用 多点支 撑才 能保证设 备 的 支撑 刚度 和稳定 性 。就刚性支 撑平 台而 言 ,多 点支撑 在调 平过程 中会 出现过 约束 的超静 定 问题 ,如果 不能对 每个 支撑 的载荷进 行合理 的分 配和控 制 ,就必然 会有 一个 ( 或多个 )支
能 。具有 调平精 度 高、调 平速度快 、抗倾 覆性 能 高、安全 防护措施 周 全 、对运动 信 息进 行 实时 的全 面监 控 、智 能化 程 度 高 、操 作 方便 灵活 、 系统 开放 性 好 等优
点。
关键 词 :电动 自动
调 平 十 点 水平精 度水平稳 定度 Fra bibliotek1 引言
该 系统有 以下 几方 面特 点 :
3J 全 自动 调平 功 能 : .
该 系统具 有全 自动 调平 功 能 ,即一键 完成 支撑 腿 的展 开 、触 地 、调平 过 程 。在 整个 调
平过 程 中无 虚腿 出现 。 32 系统 信息 显控 中心 .
本 系 统在 传统 的 按钮 、指 示 灯人 机 界面 的基 础上 。还使 用 了先进 的图 形化 操 作界 面一 触 摸显 示 屏单元 ,采用完 全 软件 可编程 的方式 设计对 系 统 的信息 进行 实 时的 全面监 控 .该 单 元 ,不 仅 可 以直 观 的显 示 系 统 的实 时逻 辑状 态 ,还 可 以显 示 系 统 的模 拟信 息 ( 倾 斜 如
随 着现代 战争对 作战 反应时 间的不 断提高 ,对 武器 装备 的机 动性要 求也 越来 越高 。由
于战争 打击对 象 的不 同 ,对 武器平 台的机动性 的要 求随 之提 出 ,车载 发射 已经成 为一个 重
要 的趋 势 。 因此 ,研 制 高水 平 精度 、高稳 定 度 、大 承 载 能力 和快 速 架设 撤 收时 问 车载 平 台 ,对 于确保 武器 的性能 和战 场生存能力 有着 至关 重要 的影 响。传统 车载平 台多 采用多 点
度 、电源 电压 、电流 、电机扭 矩 、温度 以及 报警 故 障代 码 等 ) ,并且 可 以接 受操 作 用户 对
底层执 行 器件 的直接 控制 。所 有 的这 些监 视 、控制功 能 都是 可 以通过 触摸 屏 内部 的嵌入 式
操 作系 统 ( T S R O )和 应用 程序 软件 来 实现 的 ,用 户可 以方便 地 随 时进 行功 能 结构 的修 改 ,
1 4
十点 电动 自动 调平 系统的 设计 与研究
O八 一科技
十点电动 自动调平系统的设计与研究
高建 华
( 零八 一 电子集 团有 限公 司 四川 广元 6 8 1 ) 2 0 7 摘 要 :本文介 绍十 点 电动 自动调 平 系统 的设 计理念 、 特 点、技 术指标 及功 ‘
破。
该 系统 以交 流伺 服 系统为 核心 ,应 用计 算机 控制 技术 和创 新 型调平 算法 ,来 实现 对多 点 自动 调平 系统 的智 能 化控制 ,以数字 水平 仪为 角度 信息 采集 器 .通 过控 制程 序软件 和硬 件 驱动 程序 软件 的控 制 ,使 系统 中的各 点 达到精 确 的位移 和速 度 同步 、实 时 的力矩检 测 以
而 对系 统 的硬件 结构无 需 作 出任何 改 动 。 ,
该 系统 已成功应 用 到国家某 重点项 目上 ,并 获得 了用户 单位 的好评 。
O八 一科技
十点 电动 自动调 平 系统 的设计 与研 究
l 5
2 系 统 的 设 计 思 想
传 统 的调 平策 略分 为三种 :追 高 、追基 、定 高调 平 。就 三点支 撑一 个 面而 言任何 一种 策 略都是 可 以达到 调平 目的的 。但工程 使 用 中由 于设备 的体 积 、重量 、抗倾 覆 等方 面 的需 求 三点 调 平一般 不 能满 足使用 要求 。对 多点 支撑 平 台有 调平 和稳定 性 的需求 。我们就 此开 展 了对 多点 电动 自动 调平 系统 中的难点 进行 分析 和研 究 。突破 了多点 调平算 法 、触地 重力 检 测 技 术 、高 稳 定 支撑 结 构 等 关键 技 术 问题 ,成 功 地 实现 多 点 电 动 自动 调 平 技术 上 的 突